一种360度全景环视颜色亮度调节系统的制作方法
1.本发明涉及智能驾驶技术领域,更具体的说是涉及一种360度全景环视颜色亮度调节系统。
背景技术:
2.汽车360全景环视影像系统是由四路或多路广角摄像头基于3d模型拼接渲染形成;由于汽车行驶时环视各路摄像头在不同环境和安装角度问题引起进光量不一样,输出的图像出现明暗不一,会造成环视拼接的整体鸟瞰看亮度和颜色有差异现象。因此会造成环视图像的颜色亮度不统一,会出现局部区域颜色亮度存在明暗不一的现象,对此一种能够对图像亮度的均衡调节,消除图像明暗不易的调节系统亟待解决。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于提供一种360度全景环视颜色亮度调节系统,具有通过对图像亮度均衡调节,消除明暗不一现象,提高系统的视觉效果。
4.为实现上述目的,本发明提供了如下技术方案:
5.一种360度全景环视颜色亮度调节系统,包括处理器、摄像头系统和图像处理系统,所述摄像头系统包括沿车身四周设置的若干鱼眼探头,所述摄像头系统用于获取车身四周的域图像,所述图像处理系统包括预设的识别框和成像策略,所述成像策略包括对车辆进行拟合并形成车辆模型置于识别框中心位置,调取域图像并拟合至识别框中,形成拟合图像;
6.所述处理器内设置有环视拼接系统,所述环视拼接系统内配置有环视拼接模型,所述环视拼接模型包括调取拟合图像,并根据鱼眼探头的设置位置划分各个鱼眼探头的重叠区和非重叠区且于拟合图像上进行标记;
7.所述处理器内还配置有调节策略,所述调节策略包括根据环视拼接模型的在拟合图像上标记的重叠区和非重叠区在进行亮度阈值采集计算,并进行色彩空间转换计算生成亮度均值,对亮度均值进行权重调整获得权重均值,并对权重均值进行亮度增益处理获得亮度增益值,对亮度增益值进行增益分布过滤处理获得有效增益值,对有效增益值进行增益平滑处理,并导入滤波器获得平滑增益值,根据平滑增益值反馈至色彩空间对拟合图像进行调节获得均衡图像。
8.作为本发明的进一步改进,所述鱼眼探头设置为沿车身四周的4个,分别沿车身的前后左右记为零号探头、一号探头、二号探头和三号探头,所述重叠区包括左重叠域和右重叠域,所述零号探头与相邻的一号探头和三号探头的重叠区为aol、a3r、a1l和a0r,所述a0l表征零号探头形成的左重叠域,所述a3r表征三号探头形成的右重叠域,所述a1l表征一号探头形成的左重叠域,所述a0r表征零号探头形成的右重叠域;
9.所述而号探头与相邻的一号探头和三号探头的重叠区为a2l、a1r、a2r和a3l,所述a2l表征二号探头形成的左重叠域,所述a1r表征一号探头形成的有重叠域,所述a2r表征二
号探头形成的右重叠域,所述a3l表征三号探头形成的左重叠域;
10.所述零号探头、一号探头、二号探头和三号探头分别形成的非重叠区记为na0、na1、na2和na3。
11.作为本发明的进一步改进,所述亮度阈值采集计算具体为:
12.取各个鱼眼探头位置形成的左重叠域若干面积,计算出各个鱼眼探头位置形成的左重叠域的色域亮度均值mxl(其中x为0、1、2、3);
13.取各个鱼眼探头位置形成的右重叠域若干面积,计算出鱼眼探头位置形成的右重叠域的色域亮度均值myr(其中y为(x+3)余4的余数)
14.取各个鱼眼探头位置形成的非重叠区若干面积,计算出鱼眼探头位置形成的非重叠区的色域亮度均值mx(其中x为0、1、2、3)。
15.作为本发明的进一步改进,所述色彩空间内配置有转换算法,所述色域亮度均值为yuv色域内的值,所述色彩空间转换计算亮度均值具体为将yuv色域内的亮度均值在rgb色彩空间内以转换算法计算得出亮度均值rmxl、rmyr和rmx,所述rmxl表征左重叠域的亮度均值,所述rmyr表征右重叠域的亮度均值,所述rmx表征非重叠区的亮度均值。
16.作为本发明的进一步改进,所述转换算法具体为:
17.r=y+1.4075*(v-128);
18.g=y-0.3455*(u-128)-0.7169*(v-128);
19.b=y+1.779*(u-128)。
20.作为本发明的进一步改进,所述权重调整获得权重均值具体为:
21.rmxl=w1*rmxl+w2*rmx+w3*rmxr;
22.rmyr=w1*rmyr+w2*rmx+w3*rmxl;
23.其中:w1、w2、w3为权重,w1+w2+w3=1.0且w1》w2》w3。
24.作为本发明的进一步改进,所述亮度增益处理获得亮度增益值具体为:
25.gain0=((rm3r/rm0l)-vec(1,1,1))*scale+vec(1,1,1);
26.gain2=((rm3l/rm2r)-vec(1,1,1))*scale+vec(1,1,1);
27.gain1=((gain0*rm0r)/rm1l)-vec(1,1,1)*scale+vec(1,1,1);
28.gain3=vec(1,1,1)-(gain3-vec(1,1,1))*(vec(1,1,1)-scale);
29.其中:gain0,gain1,gain2,gain3分别为零号探头、一号探头、二号探头和三号探头的亮度增益值,scale为调节系数,vec为增益向量,vec的每个分量取小于等于1。
30.作为本发明的进一步改进,所述处理器内还配置有比较算法,所述亮度增益值进行增益分布过滤处理获得有效增益值具体为:
31.对亮度增益值进行多次计算形成多组亮度增益至,以多组亮度增益值建立高斯分布,并根据比较算法比较得出有效的亮度增益值并记为有效增益值,剔剔除无效的亮度增益值。
32.作为本发明的进一步改进,所述比较算法具体为:
33.gmean-mul*stddv≤gainx≤gmean+mul*stddv,
34.其中:gmean为高斯分布均值,mul为标准差调整系数,stddv为标准差,gainx为有效增益值,其中x为0、1、2、3。
35.作为本发明的进一步改进,所述滤波器包括但不限于滑窗均值滤波器和卡尔曼滤
波器。
36.本发明的有益效果:通过设置于车身四周的鱼眼探头获取车身四周的与图像,并在图像处理系统的作用下在预设的识别框中形成拟合图像,并对拟合图像上的各个鱼眼探头形成的重叠区和非重叠区进行标记,在调节策略和环视拼接模型的作用下对拟合图像进行亮度调节最终获得均衡图像,经过调节获得的均衡图像消除了图像明暗不一的情况,整体图像亮度均衡,达到了提高系统的视觉呈现的效果。
附图说明
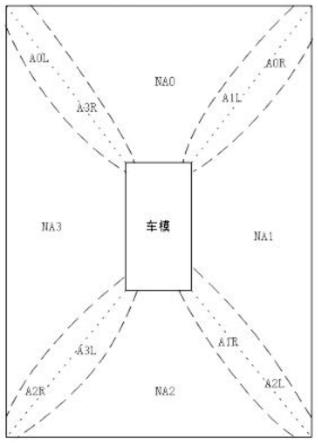
37.图1为体现本发明拟合图像的示意图。
具体实施方式
38.下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
39.参考图1所示,为本发明一种360度全景环视颜色亮度调节系统的具体实施方式,包括处理器、摄像头系统和图像处理系统,所述摄像头系统包括沿车身四周设置的若干鱼眼探头,所述摄像头系统用于获取车身四周的域图像,所述图像处理系统包括预设的识别框和成像策略,所述成像策略包括对车辆进行拟合并形成车辆模型置于识别框中心位置,调取域图像并拟合至识别框中,形成拟合图像。
40.所述处理器内设置有环视拼接系统,所述环视拼接系统内配置有环视拼接模型,所述环视拼接模型包括调取拟合图像,并根据鱼眼探头的设置位置划分各个鱼眼探头的重叠区和非重叠区且于拟合图像上进行标记。
41.所述鱼眼探头设置为沿车身四周的4个,分别沿车身的前后左右记为零号探头、二号探头、三号探头和一号探头,所述重叠区包括左重叠域和右重叠域,所述零号探头与相邻的一号探头和三号探头的重叠区为aol、a3r、a1l和a0r,所述a0l表征零号探头形成的左重叠域,所述a3r表征三号探头形成的右重叠域,所述a1l表征一号探头形成的左重叠域,所述a0r表征零号探头形成的右重叠域;所述二号探头与相邻的一号探头和三号探头的重叠区为a2l、a1r、a2r和a3l,所述a2l表征二号探头形成的左重叠域,所述a1r表征一号探头形成的有重叠域,所述a2r表征二号探头形成的右重叠域,所述a3l表征三号探头形成的左重叠域;所述零号探头、一号探头、二号探头和三号探头分别形成的非重叠区记为na0、na1、na2和na3。
42.所述处理器内还配置有调节策略,所述调节策略包括根据环视拼接模型的在拟合图像上标记的重叠区和非重叠区在进行亮度阈值采集计算,并进行色彩空间转换计算生成亮度均值,对亮度均值进行权重调整获得权重均值,并对权重均值进行亮度增益处理获得亮度增益值,对亮度增益值进行增益分布过滤处理获得有效增益值,对有效增益值进行增益平滑处理,并导入滤波器获得平滑增益值,根据平滑增益值反馈至色彩空间对拟合图像进行调节获得均衡图像。
43.所述亮度阈值采集计算具体为:
44.取各个鱼眼探头位置形成的左重叠域若干面积,计算出各个鱼眼探头位置形成的左重叠域的色域亮度均值mxl(其中x为0、1、2、3),例如:零号探头形成的左重叠域的色域亮度均值为m0l,一号探头形成的左重叠域的色域亮度均值为m1l。
45.取各个鱼眼探头位置形成的右重叠域若干面积,计算出鱼眼探头位置形成的右重叠域的色域亮度均值myr(其中y为(x+3)余4的余数),例如:零号探头形成的右重叠域的色域亮度均值为m3r,一号探头形成的右重叠域的色域亮度均值为m0r,二号探头形成的右重叠域的色域亮度均值为m1r,三号探头形成的右重叠域的色域亮度均值为m2r。
46.取各个鱼眼探头位置形成的非重叠区若干面积,计算出鱼眼探头位置形成的非重叠区的色域亮度均值mx(其中x为0、1、2、3),例如:零号探头形成的非重叠区的色域亮度均值为m0,一号探头形成的非重叠区的色域亮度均值为m1。
47.所述色彩空间内配置有转换算法,所述色域亮度均值为yuv色域内的值,所述色彩空间转换计算亮度均值具体为将yuv色域内的亮度均值在rgb色彩空间内以转换算法计算得出亮度均值rmxl、rmyr和rmx,所述rmxl表征左重叠域的亮度均值,所述rmyr表征右重叠域的亮度均值,所述rmx表征非重叠区的亮度均值,所述转换算法具体为:
48.r=y+1.4075*(v-128);
49.g=y-0.3455*(u-128)-0.7169*(v-128);
50.b=y+1.779*(u-128);
51.通过将yuv色域在rgb色彩空间内的转换,从而获得更加准确的亮度均值,rmxl、rmyr和rmx。
52.所述权重调整获得权重均值具体为:
53.rmxl=w1*rmxl+w2*rmx+w3*rmxr;
54.rmyr=w1*rmyr+w2*rmx+w3*rmxl;
55.其中:w1、w2、w3为权重,w1+w2+w3=1.0且w1》w2》w3;因为考虑鱼眼探头在获得域图像时存在误差,导致亮度均值会存在误差,尤其是以重叠区需要作为计算的基准,存在可能会被立体物体遮挡形成干扰,从而需要考虑非重叠区的亮度均值加入进行均衡,对此通过权重和加入菲重叠区在同一个鱼眼探头调整两侧重叠区的均值,获得更加准确的权重均值。
56.所述亮度增益处理获得亮度增益值具体为:
57.gain0=((rm3r/rm0l)-vec(1,1,1))*scale+vec(1,1,1);
58.gain2=((rm3l/rm2r)-vec(1,1,1))*scale+vec(1,1,1);
59.gain1=((gain0*rm0r)/rm1l)-vec(1,1,1)*scale+vec(1,1,1);
60.gain3=vec(1,1,1)-(gain3-vec(1,1,1))*(vec(1,1,1)-scale);
61.其中:gain0,gain1,gain2,gain3分别为零号探头、一号探头、二号探头和三号探头的亮度增益值,scale为调节系数,vec为增益向量,vec的每个分量取小于等于1,通过对权重均值进行增益处理,获得更加完善的亮度增益值。
62.所述处理器内还配置有比较算法,所述亮度增益值进行增益分布过滤处理获得有效增益值具体为:
63.对亮度增益值进行多次计算形成多组亮度增益至,以多组亮度增益值建立高斯分布,并根据比较算法比较得出有效的亮度增益值并记为有效增益值,剔剔除无效的亮度增
益值。
64.所述比较算法具体为:
65.gmean-mul*stddv≤gainx≤gmean+mul*stddv,
66.其中:gmean为高斯分布均值,mul为标准差调整系数,stddv为标准差,gainx为有效增益值,其中x为0、1、2、3。由于不同时刻各个鱼眼探头的工作状态是不同的,可能存在由于重叠区拼接缝被立体物遮挡形成干扰,也可能相邻的两个鱼眼探头的重叠区拼接缝采集均值数据可能不在同一投影面上,导致数据的匹配度并不相同,所以需要对每组亮度增益值的有效性进行检测和过滤,正常且有效的亮度增益值是符合均值和标准差关系的高斯分布,因此可以通过高斯分布的规律来进行比较,将符合高斯分布的亮度增益值作为是有效增益值,剔除不符合高斯分布的亮度增益值,最后将有效增益值导入滤波器中进行平滑增益处理获得平滑增益值,并根据平滑增益值反馈至色彩空间对拟合图像进行亮度的调节,滤波器包括但不限于滑窗均值滤波器和卡尔曼滤波器,从而获得均衡图像,均衡图像则消除了明暗不一的情况,整体图像亮度均匀且图像清晰,提高了系统的视觉效果。
67.工作原理及其效果:
68.通过设置于车身四周的鱼眼探头获取车身四周的与图像,并在图像处理系统的作用下在预设的识别框中形成拟合图像,并对拟合图像上的各个鱼眼探头形成的重叠区和非重叠区进行标记,在调节策略和环视拼接模型的作用下对拟合图像进行亮度调节最终获得均衡图像,经过调节获得的均衡图像消除了图像明暗不一的情况,整体图像亮度均衡,达到了提高系统的视觉呈现的效果。
69.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1