一种循环水养殖溶解氧预测控制方法、装置、设备及介质
1.本发明涉及水产养殖技术领域,尤其涉及一种基于边缘计算的循环水养殖溶解氧预测控制方法、装置、设备及介质。
背景技术:
2.随着水产养殖业的快速发展,对养殖过程中的水质参数进行全面自动化监控和处理研究,在优化养殖管理、降低养殖风险、提高经济效益等方面具有重要意义。溶解氧是影响水产养殖系统中生物生存的重要水质指标,因此,在养殖水体中实现溶解氧含量的实时预测和控制尤为重要。
3.现有的水产养殖管理控制方式主要分为纯人工养殖和自动控制系统两种。
4.纯人工养殖为传统的养殖方式。在投料、增氧机控制、水温调节、定时巡检、分鱼等各个养殖环节都必须要人工参与。对于水产养殖中增氧机的控制,纯人工养殖需要根据经验来控制增氧机的开启及增氧时间的长短。若没有准确判断增氧时机或增氧不足,就可能出现水体中溶解氧不足造成养殖生物死亡。此外,有些工厂化养殖为方便管理,采取24小时增氧的方式,这会造成大量资源浪费,增加养殖成本。
5.自动控制系统基于传感器和电控系统,解决了人工养殖设备管理不及时、不合理的问题。该系统以单片机为核心,配置各种功能的外围元器件。水产养殖增氧机的自动控制通过传感器采集溶解氧数据并进行处理,判定当前采集的溶解氧是否超过阈值,从而操作增氧机的开启。但这种简单的自动控制开关,在低于阈值之后再去控制,可能会对养殖生物的健康造成一定的影响。
6.随着深度学习技术的发展,越来越多的人工智能方法用于水产养殖领域,但养殖水体中溶解氧含量易受温度、ph、氨氮以及人类活动等多种因素的影响,且具有非线性、不稳定、时变性等特点,利用传统的深度学习模型预测溶解氧存在推理速度慢、精度低等问题,且由于存在模型计算速度、网络传输速度、场景条件等限制,将数据传输到云端模型,经计算后再将结果返回的方式,不能满足实时性要求。
7.基于此,亟需一种能够实时准确预测溶解氧含量的方法。
技术实现要素:
8.本发明的目的是提供一种循环水养殖溶解氧预测控制方法、装置、设备及介质,将训练好的溶解氧预测模型部署到边缘计算端,能够实现对溶解氧含量的实时、快速、精准预测。
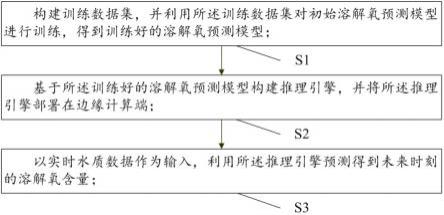
9.为实现上述目的,本发明提供了如下方案:一种循环水养殖溶解氧预测控制方法,所述预测控制方法包括:构建训练数据集,并利用所述训练数据集对初始溶解氧预测模型进行训练,得到训练好的溶解氧预测模型;基于所述训练好的溶解氧预测模型构建推理引擎,并将所述推理引擎部署在边缘
计算端;以实时水质数据作为输入,利用所述推理引擎预测得到未来时刻的溶解氧含量;所述水质数据包括水产养殖环境中的水体溶解氧含量、水温、ph值、浊度、电导率、空气温度、盐度、大气压强、氨氮浓度和叶绿素浓度。
10.一种循环水养殖溶解氧预测控制装置,所述预测控制装置包括数据采集与控制模块和边缘计算模块;所述数据采集与控制模块和所述边缘计算模块通信连接;所述数据采集与控制模块包括水质多参数传感器,所述水质多参数传感器用于采集水质数据;所述边缘计算模块用于执行上述的预测控制方法,得到未来时刻的溶解氧含量。
11.一种循环水养殖溶解氧预测控制设备,包括:处理器;以及存储器,其中存储计算机可读程序指令,其中,在所述计算机可读程序指令被所述处理器运行时执行上述的预测控制方法。
12.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述预测控制方法的步骤。
13.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明用于提供一种循环水养殖溶解氧预测控制方法、装置、设备及介质,先构建训练数据集,并利用训练数据集对初始溶解氧预测模型进行训练,得到训练好的溶解氧预测模型,然后基于训练好的溶解氧预测模型构建推理引擎,并将推理引擎部署在边缘计算端,最后以实时水质数据作为输入,利用推理引擎预测得到未来时刻的溶解氧含量,通过将训练好的溶解氧预测模型部署到边缘计算端,能够实现对溶解氧含量的实时、快速、精准预测。
附图说明
14.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1为本发明实施例1所提供的预测控制方法的方法流程图;图2为本发明实施例1所提供的transformer网络模型的结构示意图;图3为本发明实施例2所提供的预测控制装置的结构示意图;图4为本发明实施例2所提供的预测控制装置的连接示意图;图5为本发明实施例2所提供的预测控制装置的交互流程示意图;图6为本发明实施例3所提供的电子设备的实体结构示意图。
16.符号说明:1-数据采集与控制模块;2-边缘计算模块;3-智能控制模块;4-处理器;5-存储器;6-通信总线;7-通信接口;11-水质多参数传感器;12-stm32核心控制器;21-jeston nano开发板;31-变频器;32-增氧机。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.本发明的目的是提供一种循环水养殖溶解氧预测控制方法、装置、设备及介质,研究了一种全新的水产养殖车间溶解氧预测控制增氧方式,将训练好的溶解氧预测模型部署到边缘计算端,能够实现对溶解氧含量的实时、快速、精准预测。通过将部署在边缘计算端的训练好的溶解氧预测模型与模糊pid控制算法模型相结合,从而达到对水产养殖水体中的溶解氧含量边实时预测边动态控制的效果,实现对溶解氧的实时、快速、精准控制,避免资源浪费,保证了溶解氧含量的稳定性和水产养殖中养殖生物的安全性,提高了养殖效益。
19.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
20.边缘计算的出现为传统深度学习模型无法实时预测溶解氧含量的问题提供了解决方案,本实施例用于提供一种基于边缘计算的循环水养殖溶解氧预测控制方法,将训练好的溶解氧预测模型直接部署在边缘设备中,边缘设备接收到实时水质数据后可以直接计算出未来时刻的溶解氧含量的预测结果,满足实时性要求,实现了对溶解氧含量的实时、快速、精准预测。
21.如图1所示,本实施例的预测控制方法包括:s1:构建训练数据集,并利用所述训练数据集对初始溶解氧预测模型进行训练,得到训练好的溶解氧预测模型;具体的,s1中,构建训练数据集可以包括:(1)数据采集:获取多个历史水质数据和每一历史水质数据对应的未来时刻的溶解氧含量;本实施例可利用水质多参数传感器在预设采集时刻,采集水产养殖环境中的水质数据,以得到多个历史水质数据和每一历史水质数据对应的未来时刻的溶解氧含量。水质数据包括水产养殖环境中的水体溶解氧含量、水温、ph值、浊度、电导率、空气温度、盐度、大气压强、氨氮浓度和叶绿素浓度。水质多参数传感器的采集频率可设置为20s一次,假设未来时刻为5分钟之后,则第16个历史水质数据中的溶解氧含量即为第1个历史水质数据对应的未来时刻的溶解氧含量。
22.(2)数据预处理:对历史水质数据进行预处理,得到预处理后水质数据;按照采集时间的先后顺序将所有历史水质数据组成初始训练集,对初始训练集进行预处理,预处理包括依次进行的异常数据处理和数据归一化处理。
23.异常数据处理可包括:为减小因初始数据集缺失或异常对预测精度的影响,本实施例采用局部异常因子检测方法检测初始数据集中的异常值,并使用前后两个历史水质数据均值填充的方法对初始数据集进行修补,修补所用公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
式(1)中,x
t
表示在t时刻的不正确数据值(异常值),x
t-1
和x
t+1
分别表示t时刻前后相邻的两个历史水质数据值。
24.需要说明的是,水质数据包括多种类型的水质参数,此处的修补是对同一类型的水质参数数据进行修补,比如用前后相邻的两个ph值来修补异常的ph值。
25.数据归一化处理包括:由于水温、ph值、水体电导率等不同类型的水质参数具有不同的物理意义和不同的数量级,因此在模型训练之前需要对历史水质数据进行归一化处理,本实施例具体采用最大最小标准化法进行数据归一化处理,公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式(2)中,x为原始历史水质数据,为归一化处理后的历史水质数据,x
min
和x
max
分别为同一类型水质参数数据中的最小值和最大值。
26.当然,也可以选用其他方法进行归一化处理,本实施例对此不做任何限制。
27.(3)利用随机森林算法对预处理后水质数据进行降维处理,得到每一历史水质数据的降维后特征;利用随机森林算法计算预处理后水质数据中的每个水质参数的特征重要度,基于特征重要度进行特征选择,具体按照特征重要度对水质参数进行降序排序,选取排序靠前的多个特征(也即重要度较高的特征)作为水产养殖环境中溶解氧的相关特征,从每一历史水质数据中筛选出与溶解氧的相关特征类型相同的水质参数数据,得到每一历史水质数据的降维后特征。
28.具体的,通过下式计算每个水质参数的特征重要度importance:; (3)式(3)中,xj为第j个水质参数;n为随机森林数量;erroob2为随机对袋外数据所有样本的特征加入噪声干扰后再次计算的袋外数据误差,erroob1为袋外数据误差。
29.袋外数据误差的计算方式为:随机森林算法在构建每棵树时,对训练集使用了不同的bootstrap sample(随机且有放回地抽取),所以对于每棵树而言(假设对于第k棵树),大约有1/3的训练实例没有参与第k棵树的生成,它们称为第k棵树的袋外样本数据。而这样的采样特点就允许进行袋外估计,它的计算方式如下:对每个样本,计算它作为袋外样本的树对它的分类情况(约1/3的树);然后以多数投票作为该样本的分类结果;最后用误分个数占样本总数的比率作为随机森林的袋外错误率,袋外错误率也即袋外数据误差。
30.(4)以每一历史水质数据的降维后特征作为样本,并以历史水质数据对应的未来时刻的溶解氧含量作为样本标签,构建训练数据集。
31.本实施例根据水产养殖环境中溶解氧的相关特征创建新的水质数据集作为训练数据集,降维后特征可以包括水体溶解氧含量、水温、ph值、浊度、电导率和氨氮浓度。
32.在构建得到训练数据集后,s1中,利用训练数据集对初始溶解氧预测模型进行训练,得到训练好的溶解氧预测模型可以包括:将训练数据集按照7:3的比例划分训练集和测试集,将训练集输入初始溶解氧预测模型中,调整模型参数,训练初始溶解氧预测模型,确定训练后模型的超参数组合,得到训练后模型。然后将测试集输入训练后模型中,通过评价
指标对模型性能进行评估,选取评估效果最好的训练后模型作为训练好的溶解氧预测模型。
33.具体的,本实施例的初始溶解氧预测模型可为transformer网络模型,则训练过程为:先设置transformer网络模型的注意力机制头数、多头注意力机制权重矩阵维度、transformer子模块数、时间步长等,以确定transformer网络模型的网络结构,本实施例的时间步长可设置为15,即预测5分钟后的溶解氧含量。并通过实验验证,设置最佳输入网络层数、学习率、迭代次数、每次迭代样本数等参数,得到训练的最佳网络参数。然后基于训练的最佳网络参数进行训练,将训练集输入到transformer网络模型中,计算误差的损失函数,不断迭代,同时为减小过拟合对预测模型的影响,添加dropout正则化,设置丢弃率,以得到训练后模型。将测试集输入训练后transformer网络模型中,得到测试集预测结果,根据平均绝对误差(mae)、平均绝对百分比误差(mape)、均方根误差(rmse)和决定系数(r2)评估模型性能,选择最佳的训练后transformer网络模型作为训练好的溶解氧预测模型。
34.其中,本实施例所述的transformer网络模型,基于注意力机制,主要用于长序列预测。相比于经典的rnn和lstm时序预测网络模型,transformer网络模型能够利用分布式gpu进行并行训练,有效提高模型训练效率,还能够减少由于长期依赖性而导致的性能下降。
35.本实施例的transformer网络模型构建由位置编码、多头注意力机制及残差连接和归一化等组成。
36.具体的,位置编码具体包括:由于transformer网络模型没有循环神经网络的迭代操作,模型中没有天然存在输入数据间的时序关系,使用频率不同的正弦函数和余弦函数对transformer网络模型的输入进行位置编码,位置编码公式如下:;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4);
ꢀꢀꢀꢀꢀ
(5)上式中,t表示时间步,d
model
表示输入特征的维度总数,i表示输入特征的维度编号,i的取值范围是[0,d
model
/2]。
[0037]
通过上述公式产生唯一的位置信息,最终使得模型学习到位置之间的依赖关系和输入数据的时序特性,将位置编码信息添加到输入,从而产生拥有位置信息的输入。
[0038]
多头注意力机制具体包括:多头注意力机制是基于单头自注意力机制实现的,单头自注意力机制将输入矩阵经过三次不同的线性变换映射到三组空间向量矩阵,分别记为查询矩阵q、键矩阵k及值矩阵v。q、k、v矩阵每一行维度均设为dk,单头自注意力机制计算公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
ꢀꢀꢀꢀ
(9)上式中,x为输入矩阵,wq,wk,wv均为线性变换权重矩阵,softmax归一化函数用于计算注意力权重。
[0039]
多头注意力机制是将q、k、v矩阵进行多次不同的线性变换,各自进行自注意力机制运算后,将多个输出拼接起来作为最终的输出,能够使模型关注到不同方面的信息并进行整合,起到增强模型性能的作用,多头注意力机制公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)上式中,,,分别是q、k、v第i头的线性变换权重矩阵,h为多头的头数,为,,这些多头注意力矩阵拼接得到的线性变换权重矩阵。
[0040]
残差连接和归一化具体包括:transformer网络模型子模块主要由一个多头注意力机制层和一个全连接层构成,注意力层和全连接层之间使用残差连接和归一化对数据进行处理。
[0041]
残差连接能够解决梯度消失和权重矩阵的退化问题。残差连接具体做法是对输入和多头注意力层的输出进行叠加,公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)归一化是把模型的隐藏变量归一化为标准正态分布,以起到加速收敛的作用,公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)上式中,x
ij
为输出矩阵第i行第j列的值,为输出矩阵第j列的均值,为输出矩阵第j列的方差,为不为0的常数。
[0042]
如图2所示,本实施例的transformer网络模型由3个相同子模块堆叠而成,每个子模块主要包含多头注意力机制层和全连接层,多头注意力机制层和全连接层的输出需要进行残差连接和归一化操作。输入数据后,首先进行位置编码,然后经过3个transformer子模块的特征抽取,最后连接一个全连接层,输出溶解氧含量的预测值。
[0043]
本实施例提供的上述训练方法,采集水产养殖环境中的多种水质参数数据,通过随机森林算法进行数据降维,提取溶解氧的相关特征,基于溶解氧的相关特征构建训练数据集,对transformer网络模型进行训练,得到训练好的transformer预测模型,相比于传统的时序预测网络模型,transformer预测模型能够利用分布式gpu进行并行训练,有效提高模型训练效率,并提高预测模型精度。
[0044]
s2:基于所述训练好的溶解氧预测模型构建推理引擎,并将所述推理引擎部署在边缘计算端;s2可以包括:对训练好的溶解氧预测模型进行优化,得到优化后模型;基于优化后模型构建推理引擎,并将推理引擎以序列化流图的形式部署在边缘计算端,通过反序列化流图以启动推理引擎。
[0045]
更为具体的,英伟达的jeston系列提供了集硬件算力及软件开发组件解决方案,同时包含tensorrt,提供了模型优化方法,进一步实现模型在边缘计算端上的推理优化工作,能够满足实时性要求。则s2可以包括:(1)模型保存:将训练好的溶解氧预测模型使用freeze_graph保存生成.pb文件,然后使用convert-to-uff工具将.pb文件转化为uff格式。
[0046]
(2)模型优化:创建tensorrt引擎transformer.trt engine,在此过程中创建parser,设置batch_size、内存空间大小及fp16精度。通过进行网络结构整合、fp16权重量化等实现对训练好的溶解氧预测模型的优化,加载优化后的推理引擎,对其对象进行序列化,生成序列化流图,并保存引擎到边缘设备jeston nano开发板上。
[0047]
(3)模型部署:引擎保存成功后,进行推理时,只需要反序列化之前保存的流图即可启动transformer.trt engine,实现tensorrt上的推理加速。
[0048]
对训练好的溶解氧预测模型进行优化具体为利用tensorrt对训练好的溶解氧预测模型进行优化,可以包括:(1)层和张量融合:对网络层进行垂直和水平整合,缩短数据通道,高效利用gpu资源;具体包括:对网络结构进行垂直整合,即将神经网络的conv、bn、relu三个层融合为cbr一层;对网络结构进行水平组合,将输入为相同张量和执行相同操作的层融合到一起;(2)半精度fp16量化:采用fp16进行量化加速,代替单精度浮点数,保证推理的准确度,减少计算机内存占用;(3)优化高频操作函数:优化前向计算中高耗时的激活函数、layer normalization以及softmax等操作,保证优化后的模型高效执行。
[0049]
s3:以实时水质数据作为输入,利用所述推理引擎预测得到未来时刻的溶解氧含量;所述水质数据包括水产养殖环境中的水体溶解氧含量、水温、ph值、浊度、电导率、空气温度、盐度、大气压强、氨氮浓度和叶绿素浓度。
[0050]
根据构建训练数据集时所选取的降维后特征,将实时水质数据中与降维后特征一致的水质参数筛选出来,组成输入数据,输入序列化推理引擎transformer.trt engine中,即可获得预测的溶解氧含量。
[0051]
本实施例基于tensorrt对训练好的溶解氧预测模型进行网络结构整合、fp16权重量化,优化训练好的溶解氧预测模型,并在边缘计算端部署推理引擎,根据溶解氧的相关特征对实时水质数据进行处理,挑选出溶解氧的关键影响参数数据组成输入数据,输入到经
过tensorrt优化后的训练好的溶解氧预测模型进行溶解氧含量的预测,解决了传统预测模型精度差、实时性差等问题,实现了在边缘设备上快速、准确、实时预测溶解氧,为后续溶解氧的智能控制提供可靠依据。
[0052]
为实现边预测边控制、实时动态调控养殖水体中溶解氧的含量,在得到未来时刻的溶解氧含量后,本实施例的预测控制方法还包括:(1)计算未来时刻的溶解氧含量与溶解氧含量理想值的误差和误差变化率;该溶解氧含量理想值由水产养殖环境中的生物养殖密度、生物生长阶段以及所处生长季节、当前所处生长时段和水温信息所确定;在计算预测的未来时刻的溶解氧含量和溶解氧含量理想值的误差和误差变化率之前,还需要获取水产养殖环境中鱼类养殖密度、鱼类生长阶段以及当前所处的生长季节、当前所处一天中的生长时段和养殖环境中水温等信息,根据获得的上述信息得到水产养殖环境中溶解氧含量理想值。具体的,根据所获得的上述信息结合专家知识经验,建立函数关系式,计算得到水产养殖环境中溶解氧含量理想值,其中为养殖环境中溶解氧含量理想值,表示水产养殖环境中鱼类养殖密度,表示鱼类生长阶段,表示当前所处的生长季节,表示当前所处一天中的生长时段,表示养殖环境中养殖池的水体温度。
[0053]
(2)以误差和误差变化率作为输入,利用训练好的模糊pid控制算法模型得到增氧控制量;(3)根据增氧控制量对水产养殖环境中的溶解氧含量进行实时调控。
[0054]
具体的,根据增氧控制量调整变频器的频率,以改变增氧机的增氧速率,从而对溶解氧含量进行调控。
[0055]
在以误差和误差变化率作为输入,利用训练好的模糊pid控制算法模型得到增氧控制量之前,本实施例的预测控制方法还包括:对初始模糊pid控制算法模型进行训练,得到训练好的模糊pid控制算法模型,具体包括:(1)模糊化:设置语言变量,建立模糊子集,确定输入量(预测的溶解氧含量与溶解氧含量理想值的误差和误差变化率)和输出量(参数增量,参数增量为初始模糊pid控制算法模型的参数的增量,参数包括比例系数、积分系数和微分系数,参数增量分别记为、、)在模糊子集上的相应论域。通过隶属函数对历史误差和历史误差变化率进行模糊化处理,即通过隶属函数将输入量的模糊子集转化为模糊量,得到模糊化结果。隶属函数可为三角形隶属函数。
[0056]
具体的,语言变量设置为7个,分别为{nl(负大),nm(负中),ns(负小),ze(零),ps(正小),pm(正中),pl(正大)},其中,根据专家经验,误差和误差变化率的论域为[-0.9,0.9],的论域为[-0.5,0.5],的论域为[-0.3,0.3],的论域为[-0.2,0.2]。
[0057]
(2)建立模糊规则库:根据预设模糊控制规则,确定模糊控制规则表;具体的,根据专家经验确定模糊控制规则,并制定模糊控制规则表。
[0058]
(3)模糊推理:根据模糊化结果和预先建立的模糊规则库计算参数增量的隶属度,
即根据预测的溶解氧含量与溶解氧含量理想值的误差和误差变化率模糊化结果及模糊规则库推理出、、的隶属度;(4)解模糊:对参数增量的隶属度进行解模糊处理,得到参数增量的量值,即采用重心法将、、的隶属度转化成、、的精确量值;求取、、的精确量值的具体公式为:;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)上式中,pi、zi、di分别为、、论域内的值,、、为pi、zi、di的隶属度;n为隶属度的个数。
[0059]
(5)根据参数增量的量值对参数进行迭代优化,直至模糊pid控制算法模型的评价指标达到预设要求时停止优化,得到训练好的模糊pid控制算法模型。
[0060]
具体的,根据、、的精确量值,对模糊pid控制算法模型的参数进行优化,并在模糊pid控制算法模型的评价指标达到预设要求时,停止对模糊pid控制算法模型的参数进行优化,根据优化后的模糊pid控制算法模型的参数和模糊pid控制算法模型,确定训练好的模糊pid控制算法模型。
[0061]
其中,根据、、的精确量值,对模糊pid控制算法模型的参数进行优化可以包括:由、、,其中k
p
、ki、kd为pid控制中的参数,求得模糊pid控制算法模型的优化后参数,包括比例系数、积分系数和微分系数。
[0062]
模糊pid控制算法模型的评价指标达到预设要求,包括:模糊pid控制算法模型满足稳定运行状态要求、模糊pid控制算法模型达到稳定运行状态的响应时间满足要求(即小于预设响应时间)以及模糊pid控制算法模型达到稳定运行状态的超调量要满足要求(即小于预设超调量)。当同时满足以上三点要求,则表明模糊pid控制算法模型的各参数达到理想值,可停止训练,若未能达到以上三点要求的任一点,则还需要继续训练。
[0063]
直接将误差和误差变化率输入至训练好的模糊pid控制算法模型中,即可利用训练好的模糊pid控制算法模型的pid算法公式计算模糊pid输出值,即增氧控制量,pid算法公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)式(19)中,e(t)是指误差,误差即指预测的溶解氧含量与溶解氧含量理想值的差值。
[0064]
本实施例提供的基于边缘计算的循环水养殖溶解氧预测控制方法,获得水产养殖环境中的实时水质数据,通过随机森林算法提取实时水质数据中溶解氧的相关特征,以溶解氧的关键影响数据作为输入数据,输入到经过tensorrt优化并部署在边缘计算端的transformer网络模型进行溶解氧含量的预测,解决了传统预测模型精度差、实时性差等问题,提高了推理速度,达到溶解氧预测实时性、准确性和快速性的目标,在边缘设备上快速、准确、实时预测溶解氧,为后续溶解氧的智能控制提供可靠依据。另外,通过模糊控制器调整模糊pid控制算法模型的参数,得到训练好的模糊pid控制算法模型,计算得到增氧控制量,并根据增氧控制量控制变频器的频率,通过频率的变化可以控制增氧机增氧的速率,进而实现按需求快慢增氧,达到养殖水中溶解氧精准调控的目的。将量化后的transformer溶解氧预测模型与模糊pid控制算法模型相结合,可达到对水产养殖水体中的溶解氧含量边预测边控制、实时动态调控溶解氧含量的效果,实现对溶解氧的实时、快速、精准控制,避免了资源浪费,保证了在循环水养殖中的溶解氧含量的稳定性,水产养殖中养殖生物的安全性,提高了养殖效益。
[0065]
实施例2:本实施例用于提供一种循环水养殖溶解氧预测控制装置,其可基于单片机实现,如图3所示,所述预测控制装置包括数据采集与控制模块1、边缘计算模块2和智能控制模块3,数据采集与控制模块1分别和边缘计算模块2和智能控制模块3通信连接。
[0066]
如图4所示,数据采集与控制模块1包括水质多参数传感器11和控制器,控制器与水质多参数传感器11通信连接。水质多参数传感器11可采用aqua troll传感器,所需电压为12v,本实施例还自主配备传感器供电装置,将220v电源转为12v,为传感器提供合适、稳定电源,控制器可为stm32核心控制器12,水质多参数传感器11可通过rs485接口与stm32核心控制器12连接。
[0067]
其中,水质多参数传感器11用于采集水质数据,即实时采集水产养殖环境中的各种水质参数,并将水质数据传输至stm32核心控制器12,stm32核心控制器12用于接收水质数据并传输至边缘计算模块2。水质多参数传感器11主要采集两方面的数据,一方面是较长一段时间内水产养殖环境中水质数据,该数据用于模型训练;另一方面是小段时间内水产养殖环境中水质数据,该数据用于后期模型实时预测溶解氧含量。
[0068]
边缘计算模块2可为jeston nano开发板21,jeston nano开发板21通过串口与stm32核心控制器12连接,其用于执行实施例1所述的预测控制方法,得到未来时刻的溶解氧含量,即其用于基于水质数据训练初始溶解氧预测模型,由tensorrt对模型量化和优化,得到推理引擎,并保存推理引擎,将实时获取的水质数据处理后输入到推理引擎中,加速推理,得到预测的溶解氧含量,以对水产养殖环境中的溶解氧含量进行预测,并将预测的溶解氧含量传输至stm32核心控制器12。
[0069]
stm32核心控制器12的控制芯片为stm32f407系列芯片,核心控制器上存储有嵌入
式程序(模糊pid算法模型的代码),通过外围电路与水质多参数传感器11、变频器31及jeston nano开发板21相连接。控制器用于计算未来时刻的溶解氧含量与溶解氧含量理想值的误差和误差变化率,并以误差和所述误差变化率作为输入,利用训练好的模糊pid控制算法模型得到增氧控制量,并将增氧控制量传输至智能控制模块3;所述溶解氧含量理想值由所述水产养殖环境中的生物养殖密度、生物生长阶段以及所处生长季节、当前所处生长时段和水温信息所确定;如图5所示,控制器、水质多参数传感器11和jeston nano开发板21的交互过程包括:数据采集:利用水质多参数传感器11采集水质数据,由stm32核心控制器12将数据传输给jeston nano开发板21,并将水质数据保存在本地;具体的,stm32核心控制器12通过串口通信将上述水质数据传送给jeston nano开发板21,jeston nano开发板21完成数据格式转换后保存在本地.csv文件中;数据读取:读取保存在jeston nano开发板21的所述水质数据;具体的,读取保存在本地的本地.csv文件,得到原始水质数据。
[0070]
数据预处理:对读取的水质数据依次进行异常数据处理、数据归一化处理;特征选择:使用随机森林算法对处理好的数据进行降维,计算出水质数据的特征重要度,根据排名选取出水产养殖环境中溶解氧的相关特征;构建数据集:根据溶解氧的关键影响因子构建训练数据集,并划分为训练集和测试集;构建网络模型:将训练集输入transformer网络模型中,调整模型参数,训练模型,确定transformer网络的超参数组合,得到训练后transformer网络模型;模型性能评估:将测试集输入训练后transformer网络模型中,通过评价指标对模型性能进行评估;模型量化:tensorrt通过进行网络结构整合、fp16权重量化等实现对训练好的溶解氧预测模型的优化。
[0071]
模型部署:加载优化后的推理引擎,对其对象进行序列化,生成序列化流图,并保存引擎到边缘设备jeston nano开发板21上。
[0072]
溶解氧含量预测:stm32核心控制器12获取实时水质数据,将实时水质数据中与降维后特征一致的水质参数筛选出来,组成输入数据,输入序列化推理引擎transformer.trt engine中,即可获得预测的溶解氧含量。
[0073]
智能控制模块3用于根据增氧控制量对水产养殖环境中的溶解氧含量进行实时调控。
[0074]
具体的,智能控制模块3包括变频器31和增氧机32,变频器31通过rs485接口与stm32核心控制器12连接,增氧机32通过变频器31与stm32核心控制器12相连接,其中可选择曝气式风机作为增氧机32。控制器还基于增氧控制量控制调整变频器31频率,进而对增氧机32增氧速率进行控制。
[0075]
本实施例能够同时获取多种水质数据,使用随机森林算法对水质数据进行降维,提取水产养殖环境中溶解氧的相关特征来构建训练数据集,训练transformer模型,使用tensorrt对模型进行量化和优化,并部署到边缘设备上,得到高精度的推理引擎,对水产养
殖环境中的溶解氧含量进行预测,提高推理速度,满足溶解氧预测实时性、准确性和快速性的要求。同时,基于预测的溶解氧含量和溶解氧含量理想值,结合模糊pid控制算法模型,控制变频器31智能调控增氧机32增氧速率,实现边预测边控制、实时动态调控溶解氧含量,保证了水产养殖中的溶解氧含量的稳定性,避免了资源浪费,提高了水产养殖效益。另外,通过预测的溶解氧含量来动态调控增氧机32,控制增氧机32的增氧速率,能够避免水产养殖水体中溶解氧含量降到警戒值后再控制增氧机32进行增氧,能够提前对水体中即将出现的溶解氧含量状况进行提前处理,避免由于溶解氧含量的长时间过低从而影响水产养殖中生物的安全性。
[0076]
实施例3:本实施例用于提供一种水养殖溶解氧预测控制设备,包括:处理器4;以及存储器5,其中存储计算机可读程序指令,其中,在计算机可读程序指令被处理器4运行时执行如实施例1所述的预测控制方法。
[0077]
图6是本实施例提供的一种电子设备的实体结构示意图,该电子设备可以包括:处理器4、通信接口7、存储器5和通信总线6。其中,处理器4、通信接口7、存储器5通过通信总线6完成相互间的通信。处理器4可以调用存储器5中的逻辑指令,以执行实施例1所述的预测控制方法。
[0078]
此外,上述的存储器5中的逻辑指令可以通过软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机电源屏(边缘计算端设备电源屏)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)磁碟或者光盘等各种可以存储程序代码的介质。
[0079]
实施例4:本实施例用于提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序包括程序指令,被处理器执行时实现实施例1所述预测控制方法的步骤。
[0080]
本说明书中每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0081]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1