一种面向公交信号优先控制的测试评价方法
1.本发明涉及一种面向公交信号优先控制的测试评价方法,属于智能驾驶测试评估技术领域。
背景技术:
2.随着我国城市建设规模的不断扩大和城市道路交通基础设施的不断完善,城市人口和机动车保有量也迎来了爆发性增长。然而,交通拥堵、交通事故、环境污染等问题也变得日益突出。在这样的背景下,以提高道路通行率、缓解交通矛盾和改善生态环境为目的的公交优先策略成为了绿色出行的重要方向。
3.作为公交优先策略的重要组成部分,公交信号优先控制能够在信号交叉口为公交车提供优先信号,当公交车距离交通路口停止线一定距离时,信号灯发生跳变,实现公交车的优先通行,能够有效提升运行效率、减少运行延误。为了确保公交信号优先控制的精准性和可靠性,面向公交信号优先控制的测试评价引起了各国政府和测评机构的高度重视。
4.为此,国内外制定了一系列标准、规范对公交信号优先控制进行测试评价。一些发达国家的公交信号优先控制测评以单个交叉口的服务水平评价为主,美国《通行能力手册》以公交车辆延误作为信号交叉口服务水平的评价标准,将信号交叉口的服务水平进行了等级划分;日本在交通路口以公交车流量与通行能力的比值来划分服务水平等级,评价方法主要出自经济方面考虑,注重经济效益。
5.同时,我国也制定了相关的国家标准,ga/t 527.2-2016标准《道路交通信号控制方式—通行状态与控制效益评估指标及方法》等对交通信号控制的评价指标进行了明确规定,涉及汽车的排队长度、平均速度等通用性指标的定量评价;gb/t 3990-2021标准《道路交通信号控制系统通用技术要求》对交叉口信号控制系统的时间同步、数据传输规定了测试方法,并对交叉口数据列出了统计规范,涉及交通流量、平均车速、平均排队长度等。
6.然而,这些标准规范主要针对交叉口的一般车辆开展信号控制效能评价,并未在专门测试场景下开展高精度、全面、可靠的公交信号优先控制的性能定量测评研究。
技术实现要素:
7.针对交通路口条件下公交信号优先的测评指标缺乏的问题,本发明公开了一种面向公交信号优先控制的测试评价方法。该方法基于实际交通路口场景试验,利用高精度测量传感器,准确、全面地采集到公交的运动状态参数,提出并量化了公交信号优先控制的性能指标,实现了精确、可靠的科学定量测评,填补了实际应用中面向公交信号优先控制的性能测评技术的空白。
8.为了达到上述目的,本发明提供如下技术方案:
9.一种面向公交信号优先控制的测试评价方法,包括如下步骤:
10.步骤一:建立面向公交信号优先控制的性能测试场景
11.为了精确、可靠地采集公交车的运动状态信息,并使测试场景尽可能符合实际公
交驶过交通路口的行车特性,本发明建立了面向公交信号优先控制的性能测试场景;
12.首先,选取城市公路的交通路口作为试验场地;其次,建立面向公交信号优先控制的性能测试场景,该测试场景所用到的测试设备包括:厘米级高精度gnss、用于处理数据的公交车载单元、用于检测公交信号跳变的路侧单元。测试车型为普通的大批量生产的城市公交车;此外,厘米级高精度gnss、路侧单元、车载单元的时间均以gnss时间为参考基准;
13.测试的具体过程为:公交车位于公交专用道路内,以一定的速度驶向交通路口,且公交车上的厘米级高精度gnss开始同步采集公交车的运动状态参数;当靠近交通路口时,公交信号优先控制装置检测到公交车辆,并发送给交通信号控制机进行处理;交通信号控制机在综合考虑交通路口的车流量以及红绿灯相位等因素后作出信号跳变(红灯缩短或绿灯延长)的决定,让公交车优先驶过路口,具体的公交信号优先跳变机制为:
14.若当前交通灯态为红灯状态,且红灯状态剩余时间非最小值,此时控制机将信号灯跳转至红灯最小剩余时间,使得公交车在接近交通路口时,信号灯变为绿灯,保证公交车顺利通过交通路口;当识别到当前交通灯态为绿灯或黄灯状态且该状态的剩余时间不足以支撑公交车驶过交通路口时,控制机将信号灯跳转至绿灯状态,且绿灯状态持续时间可以保证公交车顺利通过;路侧单元检测到信号发生跳变时,车载单元记录当前时刻为t1;
15.当公交车的车身驶过路口停止线时,车载单元记录当前时刻为tn,但公交车应继续按原有状态行驶一段距离,此时一次测试结束;
16.步骤二:基于扩展卡尔曼滤波的公交运动状态估计
17.为了进行交通路口场景下的公交信号优先控制的测试评价,定义信号跳变时刻至车身驶过路口停止线时刻这一过程为公交车的“诱导过程”,并精确、全面地采集诱导过程中每一时刻公交车的运动状态信息;可采用滤波递推的方法,利用较少的系统观测量实现更多维度的状态参数的递推,在常用的滤波算法中,扩展卡尔曼滤波方法具有原理简单、实时性好的特点,最重要的是能够对非线性系统进行线性化近似展开;因此,本发明采用扩展卡尔曼滤波算法,以实现公交车运动状态的估计;
18.在滤波递推过程中,简化公交车的运动状态,结合运动学的匀加速模型,建立描述公交车运动特性的动态模型,取系统状态向量x=[pe,pn,ph,ve,vn,vu,ae,an,au]
t
,其中,pe,pn,ph,ve,vn,vu,ae,an,au分别表示被测公交车的东向位置、北向位置、天向位置、东向速度、北向速度、天向速度、东向加速度、北向加速度和天向加速度;状态向量x的上角标t表示对x进行转置;建立系统的状态方程并进行离散化处理,可表示为:
[0019]
x(k)=a
·
x(k-1)+w(k)
ꢀꢀ
(1)
[0020]
上式中,x(k-1)和x(k)分别表示t
k-1
时刻和tk时刻的系统状态向量;w(k)=[ω1,ω2,ω3,ω4,ω5,ω6,ω7,ω8,ω9]
t
,其中,ω1,ω2,ω3,ω4,ω5,ω6,ω7,ω8,ω9分别表示9个过程高斯白噪声分量,w(k)的协方差矩阵其中,分别表示高斯白噪声ω1,ω2,ω3,ω4,ω5,ω6,ω7,ω8,ω9对应的方差;a表示状态转移矩阵,结合运动学方程,有:
[0021][0022]
本发明利用厘米级高精度gnss作为车辆运动状态参数的测量传感器,选取t1至tn时刻的n组观测数据来构建系统的观测向量z=[p
eb
,p
nb
,va,γ]
t
,其中,p
eb
,p
nb
分别表示公交车的东向位置和北向位置,va表示公交车的对地速度,γ表示公交车的航迹角,它们由厘米级高精度gnss采集的数据经过公交车载单元处理得到;由此,建立系统的观测方程并进行离散化处理,可表示为:
[0023]
z(k)=h[x(k)]+v(k)
ꢀꢀ
(2)
[0024]
式(2)中,z(k)表示tk时刻的系统观测向量;v(k)=[v1,v2,v3,v4]
t
,其中,v1,v2,v3,v4分别表示4个观测高斯白噪声分量,v(k)对应的协方差矩阵其中,分别表示高斯白噪声v1,v2,v3,v4对应的方差;h[x(k)]是由tk时刻的状态向量预测得到的观测向量,可用tk时刻的状态向量表示为:
[0025][0026]
其中,γ'(k)满足以下关系:
[0027][0028]
上式中,v
x
和vy分别表示公交车的纵向速度和侧向速度,由该式可以得出:
[0029]
[0030]
针对上述的状态方程和观测方程,利用时间更新和观测更新进行滤波递推:
[0031]
时间更新的方程如式(3)(4)所示:
[0032][0033]
式(3)中,表示在忽略过程噪声的情况下,根据t
k-1
时刻的最优状态估计得到的tk时刻的先验状态估计,其对应的协方差矩阵表示式如下:
[0034]
p-(k)=ap(k-1)a
t
+q(k)
ꢀꢀ
(4)
[0035]
式(4)中,p-(k)表示先验状态估计对应的协方差矩阵,p(k-1)表示t
k-1
时刻最优状态估计对应的协方差矩阵;
[0036]
由式(2)可知,系统的观测方程为非线性方程,可利用泰勒公式的雅可比行列式对观测方程进行近似线性化处理,可得观测矩阵h(k)如下:
[0037][0038]
上式中,表示忽略状态噪声的影响,根据t
k-1
时刻得到的tk时刻东向速度和北向速度的状态估计;
[0039]
观测更新的方程如式(5)(6)(7)所示:
[0040]
k(k)=p-(k)
·ht
(k)
·
[h(k)p-(k)h
t
(k)+r(k)]-1
ꢀꢀ
(5)
[0041]
式(5)中,k(k)为卡尔曼增益矩阵,用来表示观测值所占的权重;
[0042][0043]
式(6)中,表示tk时刻的最优状态估计;
[0044]
p(k)=[i-k(k)h(k)]
·
p-(k)
ꢀꢀ
(7)
[0045]
式(7)中,p(k)表示最优状态估计对应的协方差矩阵;
[0046]
综上所述,时间更新方程(3)(4)和观测更新方程(5)(6)(7)组成了扩展卡尔曼滤波算法;
[0047]
经过上述滤波算法递推,可以精确、全面地采集到公交车从信号跳变时刻t1到驶过路口停止线时刻tn这段时间内的运动状态信息,具体包括东向位置、北向位置、天向位置、东向速度、北向速度、天向速度、东向加速度、北向加速度和天向加速度;
[0048]
其中,输出的公交车位置坐标集可表示为:
[0049]
p
bus
={(pe(1),pn(1),ph(1)),(pe(2),pn(2),ph(2)),
…
,(pe(n),pn(n),ph(n))}
[0050]
输出的公交车速度坐标集可表示为:
[0051]vbus
={(ve(1),vn(1),vu(1)),(ve(2),vn(2),vu(2)),
…
,(ve(n),vn(n),vu(n))}
[0052]
输出的公交车加速度坐标集可表示为:
[0053]abus
={(ae(1),an(1),au(1)),(ae(2),an(2),au(2)),
…
,(ae(n),an(n),au(n))}
[0054]
步骤三:提出并量化公交信号优先控制的性能测评指标
[0055]
为了精确、可靠地实现公交信号优先控制的性能测评,本发明提出了诱导距离、诱导过程的驾驶平顺性、诱导过程的急加速/急减速行为等测评指标,并利用步骤二得到的公交车运动状态参数对上述测评指标进行量化,具体地:
[0056]
1.诱导距离
[0057][0058]
式(8)中,诱导距离l
induction
表示公交车在诱导过程中所行驶的距离,单位为m,它反映了信号跳变时刻公交车与交通路口之间的距离,能够体现公交优先控制的作用范围;
[0059]
此外,pe(1)和pe(n)分别表示公交车在t1和tn时刻采样得到的东向位置,pn(1)和pn(n)分别表示公交车在t1和tn时刻采样得到的北向位置;
[0060]
2.诱导过程的驾驶平顺性
[0061][0062]
式(9)中,σ
induction
表示公交车在诱导过程中的平顺性量化后的值,单位为m/s2,它反映了公交车驾驶的平稳程度;
[0063]
此外,分别表示公交车在综合n组采样点之后得到的东向平均加速度,北向平均加速度和天向平均加速度。
[0064]
3.诱导过程的急加速/急减速行为
[0065][0066][0067]
本专利设立急加速的速度差阈值为4km/h,设立急减速的速度差阈值为5km/h;在诱导过程中,若相邻两次公交车的速度差值满足式(10),则判断公交车有急加速行为发生;若相邻两次公交车的速度差值满足式(11),则判断公交车有急减速行为发生;
[0068]
此外,v'a(k-1)和v'a(k)分别表示公交车在采样点t
k-1
和tk时刻的实际对地速度,单位为m/s,其表达式为有益效果:与现有技术相比,本发明的技术方案具有以下有益技术效果,具体体现在:
[0069]
(1)本发明构建的测试场景和量化的测评方法,很好地弥补了交通路口条件下缺乏对公交优先在诱导过程中的定量测评问题,实现了公交优先控制性能的精准、可靠的科学定量测评。
[0070]
(2)本发明根据扩展卡尔曼滤波法来推导公交车在诱导过程中的运动状态信息,该滤波方法具有原理简单、实时性好的特点,并适用于非线性系统。
附图说明
[0071]
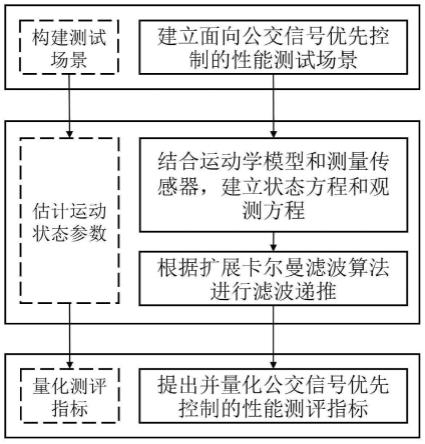
图1是本发明的技术路线示意图;
[0072]
图2是本发明建立的面向公交信号优先控制的性能测试场景图。
具体实施方式
[0073]
以下将结合具体实例对本发明提供的技术方案进行详细说明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
[0074]
随着我国城市建设规模的不断扩大和城市道路交通基础设施的不断完善,城市人口和机动车保有量也迎来了爆发性增长。然而,交通拥堵、交通事故、环境污染等问题也变得日益突出。在这样的背景下,以提高道路通行率、缓解交通矛盾和改善生态环境为目的的公交优先策略成为了绿色出行的重要方向。
[0075]
作为公交优先策略的重要组成部分,公交信号优先控制能够在信号交叉口为公交车提供优先信号,当公交车距离交通路口停止线一定距离时,信号灯发生跳变,实现公交车的优先通行,能够有效提升运行效率、减少运行延误。为了确保公交信号优先控制的精准性和可靠性,面向公交信号优先控制的测试评价引起了各国政府和测评机构的高度重视。
[0076]
为此,国内外制定了一系列标准、规范对公交信号优先控制进行测试评价。一些发达国家的公交信号优先控制测评以单个交叉口的服务水平评价为主,美国《通行能力手册》以公交车辆延误作为信号交叉口服务水平的评价标准,将信号交叉口的服务水平进行了等级划分;日本在交通路口以公交车流量与通行能力的比值来划分服务水平等级,评价方法主要出自经济方面考虑,注重经济效益。
[0077]
同时,我国也制定了相关的国家标准,ga/t 527.2-2016标准《道路交通信号控制方式—通行状态与控制效益评估指标及方法》等对交通信号控制的评价指标进行了明确规定,涉及汽车的排队长度、平均速度等通用性指标的定量评价;gb/t 3990-2021标准《道路交通信号控制系统通用技术要求》对交叉口信号控制系统的时间同步、数据传输规定了测试方法,并对交叉口数据列出了统计规范,涉及交通流量、平均车速、平均排队长度等。
[0078]
然而,这些标准规范主要针对交叉口的一般车辆开展信号控制效能评价,并未在专门测试场景下开展高精度、全面、可靠的公交信号优先控制的性能定量测评研究。
[0079]
本发明针对交通路口条件下公交信号优先的测评指标缺乏的问题,公开了一种公交信号优先控制的测试评价方法。该方法基于实际交通路口场景试验,利用高精度测量传感器准确、可靠地采集到公交的运动状态参数,提出并量化了公交信号优先控制的性能指标,实现了全面、可靠的科学定量测评,填补了实际应用中面向公交信号优先控制的性能测评技术的空白。本发明的技术路线如图1所示,具体步骤如下:
[0080]
步骤一:建立面向公交信号优先控制的性能测试场景
[0081]
已有的标准、规范主要针对交叉口的一般车辆开展信号控制效能评价,并未专门针对公交信号优先开展科学、可靠的定量测评研究。为了精确可靠地采集公交车的运动状态信息,并使测试场景尽可能符合实际公交驶过交通路口的行车特性,本发明建立了面向公交信号优先控制的性能测评场景,如图2所示;
[0082]
首先,选取城市公路的交通路口作为试验场地;其次,建立面向公交信号优先控制的性能测试场景,该测试场景所用到的测试设备包括:厘米级高精度gnss、用于处理数据的
公交车载单元、用于检测公交信号跳变的路侧单元,测试车型为普通的大批量生产的城市公交车;此外,厘米级高精度gnss、路侧单元、车载单元的时间均以gnss时间为参考基准;
[0083]
测试的具体过程为:公交车位于公交专用道路内,以一定的速度驶向交通路口,且公交车上的厘米级高精度gnss开始同步采集公交车的运动状态参数;当靠近交通路口时,公交信号优先控制装置检测到公交车辆,并发送给交通信号控制机进行处理;交通信号控制机在综合考虑交通路口的车流量以及红绿灯相位等因素后作出信号跳变(红灯缩短或绿灯延长)的决定,让公交车优先驶过路口;具体的公交信号优先跳变机制为:
[0084]
若当前交通灯态为红灯状态,且红灯状态剩余时间非最小值,此时控制机将信号灯跳转至红灯最小剩余时间,使得公交车在接近交通路口时,信号灯变为绿灯,保证公交车顺利通过交通路口;当识别到当前交通灯态为绿灯或黄灯状态且该状态的剩余时间不足以支撑公交车驶过交通路口时,控制机将信号灯跳转至绿灯状态,且绿灯状态持续时间可以保证公交车顺利通过;路侧单元检测到信号发生跳变时,车载单元记录当前时刻为t1;
[0085]
当公交车的车身驶过路口停止线时,车载单元记录当前时刻为tn,但公交车应继续按原有状态行驶一段距离,此时一次测试结束;
[0086]
步骤二:基于扩展卡尔曼滤波的公交运动状态估计
[0087]
为了进行交通路口场景下的公交信号优先控制的测试评价,定义信号跳变时刻至车身驶过路口停止线时刻这一过程为公交车的“诱导过程”,并精确、全面地采集诱导过程中每一时刻公交车的运动状态信息;可采用滤波递推的方法,利用较少的系统观测量实现更多维度的状态参数的递推,在常用的滤波算法中,扩展卡尔曼滤波方法具有原理简单、实时性好的特点,最重要的是能够对非线性系统进行线性化近似展开;因此,本发明采用扩展卡尔曼滤波算法,以实现公交车运动状态的估计;
[0088]
在滤波递推过程中,简化公交车的运动状态,结合运动学的匀加速模型,建立描述公交车运动特性的动态模型,取系统状态向量x=[pe,pn,ph,ve,vn,vu,ae,an,au]
t
,其中,pe,pn,ph,ve,vn,vu,ae,an,au分别表示被测公交车的东向位置、北向位置、天向位置、东向速度、北向速度、天向速度、东向加速度、北向加速度和天向加速度;状态向量x的上角标t表示对x进行转置;建立系统的状态方程并进行离散化处理,可表示为:
[0089]
x(k)=a
·
x(k-1)+w(k)
ꢀꢀ
(1)
[0090]
上式中,x(k-1)和x(k)分别表示t
k-1
时刻和tk时刻的系统状态向量;w(k)=[ω1,ω2,ω3,ω4,ω5,ω6,ω7,ω8,ω9]
t
,其中,ω1,ω2,ω3,ω4,ω5,ω6,ω7,ω8,ω9分别表示9个过程高斯白噪声分量,w(k)的协方差矩阵其中,分别表示高斯白噪声ω1,ω2,ω3,ω4,ω5,ω6,ω7,ω8,ω9对应的方差;a表示状态转移矩阵,结合运动学方程,有:
[0091][0092]
本发明利用厘米级高精度gnss作为车辆运动状态参数的测量传感器,选取t1至tn时刻的n组观测数据来构建系统的观测向量z=[p
eb
,p
nb
,va,γ]
t
,其中,p
eb
,p
nb
分别表示公交车的东向位置和北向位置,va表示公交车的对地速度,γ表示公交车的航迹角,它们由厘米级高精度gnss采集的数据经过公交车载单元处理得到;由此,建立系统的观测方程并进行离散化处理,可表示为:
[0093]
z(k)=h[x(k)]+v(k)
ꢀꢀ
(2)
[0094]
式(2)中,z(k)表示tk时刻的系统观测向量;v(k)=[v1,v2,v3,v4]
t
,其中,v1,v2,v3,v4分别表示4个观测高斯白噪声分量,v(k)对应的协方差矩阵其中,分别表示高斯白噪声v1,v2,v3,v4对应的方差;h[x(k)]是由tk时刻的状态向量预测得到的观测向量,可用tk时刻的状态向量表示为:
[0095][0096]
其中,γ'(k)满足以下关系:
[0097][0098]
上式中,v
x
和vy分别表示公交车的纵向速度和侧向速度,由该式可以得出:
[0099]
[0100]
针对上述的状态方程和观测方程,利用时间更新和观测更新进行滤波递推:
[0101]
时间更新的方程如式(3)(4)所示:
[0102][0103]
式(3)中,表示在忽略过程噪声的情况下,根据t
k-1
时刻的最优状态估计得到的tk时刻的先验状态估计,其对应的协方差矩阵表示式如下:
[0104]
p-(k)=ap(k-1)a
t
+q(k)
ꢀꢀ
(4)
[0105]
式(4)中,p-(k)表示先验状态估计对应的协方差矩阵,p(k-1)表示t
k-1
时刻最优状态估计对应的协方差矩阵;
[0106]
由式(2)可知,系统的观测方程为非线性方程,可利用泰勒公式的雅可比行列式对观测方程进行近似线性化处理,可得观测矩阵h(k)如下:
[0107][0108]
上式中,表示忽略状态噪声的影响,根据t
k-1
时刻得到的tk时刻东向速度和北向速度的状态估计;
[0109]
观测更新的方程如式(5)(6)(7)所示:
[0110]
k(k)=p-(k)
·ht
(k)
·
[h(k)p-(k)h
t
(k)+r(k)]-1
ꢀꢀ
(5)
[0111]
式(5)中,k(k)为卡尔曼增益矩阵,用来表示观测值所占的权重;
[0112][0113]
式(6)中,表示tk时刻的最优状态估计;
[0114]
p(k)=[i-k(k)h(k)]
·
p-(k)
ꢀꢀ
(7)
[0115]
式(7)中,p(k)表示最优状态估计对应的协方差矩阵;
[0116]
综上所述,时间更新方程(3)(4)和观测更新方程(5)(6)(7)组成了扩展卡尔曼滤波算法;
[0117]
经过上述滤波算法递推,可以精确、全面地采集到公交车从信号跳变时刻t1到驶过路口停止线时刻tn这段时间内的运动状态信息,具体包括东向位置、北向位置、天向位置、东向速度、北向速度、天向速度、东向加速度、北向加速度和天向加速度;
[0118]
其中,输出的公交车位置坐标集可表示为:
[0119]
p
bus
={(pe(1),pn(1),ph(1)),(pe(2),pn(2),ph(2)),
…
,(pe(n),pn(n),ph(n))}
[0120]
输出的公交车速度坐标集可表示为:
[0121]vbus
={(ve(1),vn(1),vu(1)),(ve(2),vn(2),vu(2)),
…
,(ve(n),vn(n),vu(n))}
[0122]
输出的公交车加速度坐标集可表示为:
[0123]abus
={(ae(1),an(1),au(1)),(ae(2),an(2),au(2)),
…
,(ae(n),an(n),au(n))}
[0124]
步骤三:提出并量化公交信号优先控制的性能测评指标
[0125]
为了精确、可靠地实现公交信号优先控制的性能测评,本发明提出了诱导距离、诱导过程的驾驶平顺性、诱导过程的急加速/急减速行为等测评指标,并利用步骤二得到的公交车运动状态参数对上述测评指标进行量化,具体地:
[0126]
1.诱导距离
[0127][0128]
式(8)中,诱导距离l
induction
表示公交车在诱导过程中所行驶的距离,单位为m,它反映了信号跳变时刻公交车与交通路口之间的距离,能够体现公交优先控制的作用范围;
[0129]
此外,pe(1)和pe(n)分别表示公交车在t1和tn时刻采样得到的东向位置,pn(1)和pn(n)分别表示公交车在t1和tn时刻采样得到的北向位置;
[0130]
2.诱导过程的驾驶平顺性
[0131][0132]
式(9)中,σ
induction
表示公交车在诱导过程中的平顺性量化后的值,单位为m/s2,它反映了公交车驾驶的平稳程度;
[0133]
此外,分别表示公交车在综合n组采样点之后得到的东向平均加速度,北向平均加速度和天向平均加速度。
[0134]
3.诱导过程的急加速/急减速行为
[0135][0136][0137]
本专利设立急加速的速度差阈值为4km/h,设立急减速的速度差阈值为5km/h;在诱导过程中,若相邻两次公交车的速度差值满足式(10),则判断公交车有急加速行为发生;若相邻两次公交车的速度差值满足式(11),则判断公交车有急减速行为发生;
[0138]
此外,v'a(k-1)和v'a(k)分别表示公交车在采样点t
k-1
和tk时刻的实际对地速度,单位为m/s,其表达式为
[0139]
当进行交通路口场景下的公交信号优先控制的性能测评时,首先,利用“步骤一”构建的测试场景进行公交优先在诱导过程中的性能试验,并利用“步骤二”提出的扩展卡尔曼滤波算法对公交的位置、速度、加速度等参数进行滤波递推。最后,在精确采集到公交运动状态参数的基础上,根据“步骤三”提出的公交信号优先控制的性能测评指标进行计算,从而实现精确、可靠的科学定量测评。
[0140]
本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括
由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1