一种基于无人机的车辆轴型及速度的动态监测方法及装置
1.本发明涉及智慧交通领域,具体涉及一种基于无人机的交通参数动态监测方法。
背景技术:
2.智慧高速公路是适配现如今电子信息发达的一种高速公路新形态,截止2020年底,全国公路总里程519.81万公里,道路汽车保有量达到2.7亿辆,如此庞大的交通量需要更为科学的监控手段作为辅助,来实现交通参数的动态监测。
3.目前交通参数检测方法大多通过采用埋设感应线圈、红外激光或通过安装监控摄像头来对道路交通信息进行提取,但埋设感应线圈会对路面本身造成破坏,并且该方法施工量大,维护也比较困难;采用红外激光进行检测虽然不会对路面进行破坏但容易被行人以及非机动车影响精度;安装监控摄像头的成本较大,并且只能对某一条特定的道路进行交通信息提取。
技术实现要素:
4.发明目的:针对以上问题,本发明提出一种利用无人机搭载激光雷达和运动照相机的交通参数动态监测技术,可以实时对道路交通进行监测,并建立相应的交通数据库,方便相关部门进行管理。
5.技术方案:为实现本发明的目的,本发明所采用的技术方案是:
6.一种基于无人机的车辆轴型及速度的动态监测方法,具体步骤如下:
7.(一)设置无人机搭载激光雷达及运动相机方案
8.将运动相机位置设定为与激光雷达呈空间水平状态;
9.(二)激光雷达与运动相机外参设定
10.对激光雷达以及运动照相机进行标定,实现激光雷达与运动照相机坐标系的统一;
11.通过ros系统进行激光雷达的点云信息以及运动相机所拍摄的图像信息的收集,并提取出具有相同时间戳的点云信息以及图像信息;
12.(三)设置无人机飞行方案
13.基于激光雷达构建道路三维模型,并结合二维地图导出道路数据;
14.结合无人机的起终点,通过道路三维模型识别出道路净空范围内的障碍物,并根据道路平曲线与竖曲线生成相应的无人机航点;
15.将无人机航点导入dj onboard sdk,完成无人机路径规划任务;
16.对于车辆轴型检测,还设置了无人机悬停位置;
17.(四)数据处理
18.通过地面点云的法向量解算出激光雷达偏移角,并利用旋转矩阵对点云信息进行预处理使其水平;
19.基于车道线,利用点云分割算法对预处理后的点云信息进行分割,提取出道路部
分,通过point-rcnn识别算法实现车辆目标识别;
20.获取车辆目标识别得到的三维物体框的八个顶点坐标,通过对比同一目标在不同图像帧的三维物体框的位置,实现对车辆目标的速度检测;
21.基于运动相机所拍摄的图像信息,通过yolo图像识别算法实现车辆轴型的识别。
22.进一步地,运动照相机位置设定为与激光雷达呈空间水平状态。
23.进一步地,该方法还包括:通过点云分割算法,实现对该条道路的交通方向系数的计算。
24.进一步地,将采集到的点云信息和图像信息传至地面站,搭建交通参数监测数据库。
25.进一步地,通过旋转与平移变换,使得激光雷达坐标系与相机坐标系在空间上对齐。
26.进一步地,通过3d目标跟踪算法实现对同一辆车在不同点云坐标中位置情况获取。
27.一种基于无人机的车辆轴型及速度的动态监测装置,包括地面控制与储存系统、无人机以及设置在无人机上的激光雷达、工控机、运动相机、无线数据传输设备,其中:
28.激光雷达,用于对道路交通的点云信息进行收集;
29.运动相机,用于对路面交通的图像信息进行收集;
30.工控机,用于完成激光雷达与运动相机外参设定;
31.地面控制与储存系统,用于通过无线数据传输设备接收点云信息和图像信息并进行数据处理,发送无人机飞行方案。
32.进一步地,运动相机的拍摄频率与激光雷达的发射频率相同。
33.有益效果:本发明通过无人机搭载激光雷达和运动照相机,利用激光雷达获取的物体三维信息以及相机获取的二维信息,可以实现对任意道路交通量、车辆速度、车辆轴型、车道方向系数等基本交通参数的监测。
附图说明
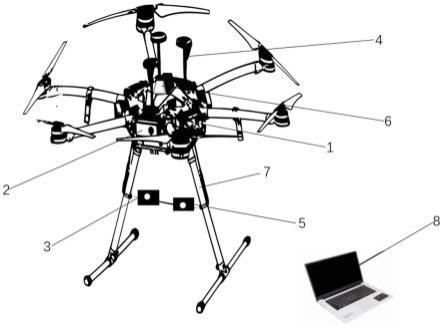
34.图1为一种基于无人机的车辆轴型及速度的动态监测装置示意图;
35.其中:1-无人机,2-无人机飞控单元,3-激光雷达,4-工控机,5-运动相机,6-无线数据传输设备,7-无人机起落架,8-地面控制与储存系统;
36.图2为激光雷达与运动相机坐标系示意图。
具体实施方式
37.以下结合附图对本发明的优选实施例进行说明,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
38.参阅附图1,本发明所述的一种基于无人机的车辆轴型及速度的动态监测装置,包括:无人机1主要用于构建搭载激光雷达和运动照相机的飞行平台;无人机飞控单元1用于接收地面控制与储存系统发出的指令并针对指令做出相应的调整;激光雷达3用于搭载在无人机上对道路交通的点云信息进行收集;工控机4对激光雷达和运动照相机采集的数据进行数据解析与预处理;运动相机5用于拍摄对路面交通的图像信息,拍摄频率为与激光雷
达相同的发射频率;无线数据传输设备6用于将激光雷达以及运动照相机采集的数据无损地传输给地面工作站;;无人机起落架7用于支撑无人机稳定起飞降落;地面控制与储存系统8中的控制系统用于对无人机,保证无人机的飞行路线、飞行高度达到预设要求,存储系统用于对采集的交通信息进行存储,构建基于无人机的交通数据库。
39.作为进一步的优选实施例,无人机搭载激光雷达和运动照相机用于对道路交通信息进行实时拍摄。
40.作为进一步的优选实施例,激光雷达通过采集的物体三维信息可以深度感知车辆在空间中的位置。
41.作为进一步的优选实施例,通过激光雷达对车辆目标的识别,感知三维物体框的空间信息,可以对车辆速度做出较为精确的测量。
42.作为进一步的优选实施例,通过运动相机拍摄的图像数据可以精确地预估出车辆轴型。
43.本发明所提到的一种基于无人机的交通参数动态监测装置,首先要确定无人机悬停位置或者由飞手手动控制无人机飞往指定地点,并通过无人机搭载激光雷达和运动相机对道路车辆信息进行收集,将收集的数据传输到工控机进行预处理。
44.其次,无线数据传输设备将预处理后的图像信息和点云信息传输给地面控制与储存系统,地面控制与储存系统对传输的数据进行相应的算法识别,最终实现对交通参数的实时监测。并将图像信息和点云信息进行存储构建相应的交通参数数据库。
45.本发明所述的一种基于无人机的车辆轴型及速度的动态监测方法,包括如下步骤:
46.(一)无人机搭载激光雷达及运动相机方案
47.step1.由于半固态激光雷达上下视角大小为25
°
左右,因此将其搭载在无人机上需要向下倾斜一定的角度,才能更好的通过激光雷达收集道路交通信息;。
48.step2.运动相机位置设定为与激光雷达呈空间水平状态。
49.(二)激光雷达与运动相机外参设定
50.step3.通过ros系统实现激光雷达数据与运动相机数据的收集;
51.step4.利用标定工具实现激光雷达与运动相机坐标系的统一;
52.step5.将采集到的包含激光雷达和运动相机数据的rosbag包,利用技术手段对不同帧率的设备信息分别提取,并最终提取出具有相同时间戳的雷达与图片信息。
53.(三)无人机飞行方案
54.step6.通过激光雷达构建道路三维模型,并结合二维地图导出道路数据;
55.step7.结合无人机起终点,并通过道路三维模型识别出道路净空范围内的障碍物,根据道路平曲线与竖曲线生成相应的无人机航点;
56.step8.将无人机航点导入dj onboard sdk完成无人机路径规划任务;
57.step9.对于车辆轴型检测通过计算相机成像区域,设置合理的无人机悬停位置,对道路区域内的车辆轴型图像信息进行收集。
58.(四)数据处理
59.step10.由于机载激光雷达并不是水平搭载,需要通过地面点云的法向量解算出雷达偏移角,并利用旋转矩阵对点云数据进行预处理使其水平;
60.ste11.通过车道线利用点云分割算法对旋转后的点云进行分割提取出道路部分;
61.step12.通过point-rcnn识别算法实现车辆目标识别;
62.step13.获取三维物体框八个顶点坐标,通过对比同一目标在不同帧的三维物体框的位置,实现对车辆目标的速度检测;
63.step14.通过运动相机在连续帧下拍到的照片,通过yolo图像识别算法实现车辆轴型的识别;
64.step15.通过点云分割算法以及车辆目标识别算法,实现对该条道路的交通方向系数的计算。
65.(五)搭建交通参数监测数据库
66.step16.将拍摄的点云信息以及照片通过无线数据传输设备传至地面站的数据库进行保存。
67.进一步地,通过激光雷达视角确定无人机搭载装置的最佳倾角,确保对不同道路进行全面的交通信息收集;将运动相机放置与激光雷达空间水平,并确保达到对汽车轴型的拍摄。
68.进一步地,将激光雷达发射频率与运动照相机拍摄频率设为相同参数,方便后续车辆信息的确认与统计;设置时间同步目的在于确保车辆点云信息与车辆图像信息对应。
69.进一步地,通过无人机悬停位置,对比不同的拍摄角度,实现对路幅内车辆信息的全采集;通过对比激光雷达和运动照相机的检测精度,确定无人机飞行的最佳高度。
70.进一步地,如图2所示,统一物体在激光雷达与相机坐标系中的位置,激光雷达扫描的点云位于以激光雷达为中心的三维坐标系下。由于激光雷达与相机两个传感器安装位置不同,因此需要对激光雷达坐标系oxyz和相机坐标系oxyz进行转换。转换过程包括旋转与平移变换,需要先将激光雷达坐标系通过旋转矩阵r以o为中心将x轴和y轴旋转至相机坐标系位置,并结合平移矩阵t使得激光雷达坐标系与相机坐标系在空间上对齐。
71.进一步地,设置时间同步目的在于确保点云信息与图像信息具有相同的时间戳。在收集时采用录制rosbag包的方式使得点云和图像能够同时录制,由于激光雷达与相机帧率不同,并且相机帧率一般情况下是比雷达帧率要大,因此可以先对录制的rosbag包提取视频,在将视频转换为图像的过程中控制视频帧率,使两个传感器采集的数据在时间上同步。
72.进一步地,s5.1:通过采集的地面点云法向量解算出激光雷达相对于水平方向的偏移角,并利用对应的旋转矩阵对原始点云进行初步处理,使其水平;
73.s5.2:对旋转后的点云再进行处理,通过车道线以及点云分割算法对点云中的路面区域进行提取;
74.s5.3:通过point-rcnn识别算法实现车辆目标识别,并结合相应的3d目标跟踪算法实现对同一辆车在不同点云坐标中位置情况获取。
75.s5.3:通过获取同一目标车辆在不同帧内的三维物体框信息,对比前后两帧的物体框八个顶点坐标,以空间位置的变换为基础实现车辆目标的速度检测;
76.s5.4:通过图像识别算法对采集到的路面车辆照片进行轴型识别;
77.s5.5:对不同行车方向的交通量进行统计、计算该条道路的方向系数。
78.应当指出,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想,对
于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也在本技术权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1