一种用于配电网监测及预判的边缘计算方法及装置与流程
1.本发明涉及配电房安全管理领域,特别是涉及一种用于配电网监测及预判的边缘计算方法及装置。
背景技术:
2.在现代电力系统配网系统中,配电房作为供电末端。广泛出现在城市和乡村。由于大部分配电房都是无人值守,所以对于配电房的环境监测显得尤为重要。目前,配电房针对水浸的风险,配电房只配备了水浸传感器。针对火灾的风险,配电房配备了烟雾传感器和喷淋。对外人进入配电房,只是在门口配备了普通摄像头。主机系统通过这些设备收集得到环境信息,进行实时采集,处理和上报。
3.上述方案在配电房中,只能获取告警信号。后台人员往往无法直观了解现场配电房的异常情况。环境监测功能仅仅体现在告警信号这一层面。如果水涨过高或者火灾扩大容易造成设备损坏,将造成严重后果。而且如果传感器在发生故障的情况下,误发信号或超过阈值不发信号,都有可能造成极大的隐患,同时对配电运维工作造成不小的负担。
技术实现要素:
4.本发明的目的是提供一种用于配电网监测及预判的边缘计算方法及装置,能够直观的了解现场配电房的异常情况,避免误发信号或超过阈值不发信号带来的隐患。
5.为实现上述目的,本发明提供了如下方案:一种用于配电网监测及预判的边缘计算方法,所述边缘计算方法包括:确定触发条件;对环境变量开始监测,得到监测结果;判断所述监测结果是否满足触发条件;若不满足,则返回步骤“对环境变量开始监测,得到监测结果”继续进行监测;若满足,则发出警报信号,得到第一数值;收集异常环境监测数据集x={x1,x2,
…
,xn},其中,x1,x2,
…
,xn为异常环境监测数据;对所述异常环境监测数据集x={x1,x2,
…
,xn}进行标记,得到标签数据集y={y1,y2,
…
,yn},其中,y1,y2,
…
,yn为标签数据;基于所述异常环境监测数据集x={x1,x2,
…
,xn}和所述标签数据集y={y1,y2,
…
,yn}确定训练集d={x,y};采用所述训练集对神经网络进行训练,得到训练好的神经网络;获取配电房内视频图像;滤除所述视频图像中的冗余帧,得到异常环境关键帧;将所述异常环境关键帧输入到所述训练好的神经网络中,得到异常目标置信度;判断所述置信度是否大于预设阈值;
若小于或等于则返回步骤“滤除所述视频图像中的冗余帧,得到异常环境关键帧”;若大于,则将这一信号传入边缘计算装置,得到第二数值,执行下一步骤;边缘计算装置根据所述第一数值和所述第二数值得到决策。
6.可选的,所述环境变量包括:水位、烟雾以及门状态。
7.可选的,所述训练好的神经网络为qint8,所述qint8包括:第一卷积单元、第二卷积单元、主干网络、金字塔网络、检测头以及编解码器;所述第一卷积单元、第二卷积单元、主干网络、金字塔网络、检测头以及编解码器依次连接。
8.可选的,所述滤除所述视频图像中的冗余帧,得到异常环境关键帧具体包括以下步骤:获取连续的四帧图像;将所述四帧图像进行缩放并转换为灰度图片;对所述灰度图像进行高斯滤波,得到图片;对做差,得到灰度特征图:,其中dif 1
和dif 2
均为灰度图片相减后得到的灰度特征图;对所述dif 1
和dif 2
自动填充;将dif 1
和dif 2
调整为一维向量,对dif 1
和dif 2
求余弦相关系数corr;摄像头获取下一帧图片p4,;判断所述余弦相关系数corr是否大于门限值thr
corr
,若corr》thr
corr
,则输出关键帧p
key
=p4,否则,返回步骤“将所述四帧图像进行缩放并转换为灰度图片”。
9.可选的,对所述dif 1
和dif 2
自动填充具体采用如下公式:其中,dif为二值图像灰度值,dif
i,j
为灰度图片像素坐标点的特征值,thrs为dif 1
和dif 2
的阈值。
10.可选的,边缘计算装置根据所述第一数值和所述第二数值得到决策具体包括以下步骤:根据公式确定决策y:y=g1*第一数值+g2*第二数值,其中g1和g2为权重,g1》g2;当所述决策y在第一设定范围内时,则边缘计算装置跳开进线开关,通知主站;
当所述决策y在第二设定范围内时,则触发告警信号。
11.基于本发明中的上述方法,本发明另外提供一种用于配电网监测及预判的边缘计算装置,所述装置包括:触发条件确定模块,用于确定触发条件;环境变量监测模块,用于对环境变量开始监测,得到监测结果;第一判断模块,用于判断所述监测结果是否满足触发条件;第一循环模块,用于当不满足时,返回“环境变量监测模块”继续进行监测;第一数值确定模块,用于当满足时,发出警报信号,得到第一数值;异常数据收集模块,用于收集异常环境监测数据集x={x1,x2,
…
,xn},其中,x1,x2,
…
,xn为异常环境监测数据;数据标记模块,用于对所述异常环境监测数据集x={x1,x2,
…
,xn}进行标记,得到标签数据集y={y1,y2,
…
,yn},其中,y1,y2,
…
,yn为标签数据;训练集确定模块,用于基于所述异常环境监测数据集x={x1,x2,
…
,xn}和所述标签数据集y={y1,y2,
…
,yn}确定训练集d={x,y};训练模块,用于采用所述训练集对神经网络进行训练,得到训练好的神经网络;图像获取模块,用于获取配电房内视频图像;预处理模块,用于滤除所述视频图像中的冗余帧,得到异常环境关键帧;置信度确定模块,用于将所述异常环境关键帧输入到所述训练好的神经网络中,得到异常目标置信度;第二判断模块,用于判断所述置信度是否大于预设阈值;第二循环模块,用于当小于或等于时,返回“预处理模块”;第二数值确定模块,用于当大于时,则将这一信号传入边缘计算装置,得到第二数值,执行下一步骤;决策模块,用于通过边缘计算装置根据所述第一数值和所述第二数值得到决策。
12.可选的,所述训练好的神经网络为qint8,所述qint8包括:第一卷积单元、第二卷积单元、主干网络、金字塔网络、检测头以及编解码器;所述第一卷积单元、第二卷积单元、主干网络、金字塔网络、检测头以及编解码器依次连接。
13.可选的,所述预处理模块具体包括以下单元:第一图像获取单元,用于获取连续的四帧图像;灰度图转换单元,用于将所述四帧图像进行缩放并转换为灰度图片;高斯滤波单元,用于对所述灰度图像进行高斯滤波,得到图片;做差单元,用于对做差,得到灰度特征图:,其中dif 1
和dif 2
均为灰度图片相减后得到的灰度特征图;
自动填充单元,用于对所述dif 1
和dif 2
自动填充;余弦相关系数计算单元,用于将dif 1
和dif 2
调整为一维向量,对dif 1
和dif 2
求余弦相关系数corr;第二图像获取单元,用于通过摄像头获取下一帧图片p4,;判断单元,用于判断所述余弦相关系数corr是否大于门限值thr
corr
,若corr》thr
corr
,则输出关键帧p
key
=p4,否则,返回“灰度图转换单元”。
14.可选的,自动填充单元具体采用如下公式:其中,dif为二值图像灰度值,dif
i,j
为灰度图片像素坐标点的特征值,thrs为dif 1
和dif 2
的阈值。
15.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明中的上述方法及装置,增加边缘计算装置实现了本地化处理,同时拥有了就地决策的功能,对网络要求不高,也不需要增加后台的计算压力,能够实现对环境实时的处理;通过对水位、烟雾以及门状态进行监测,即增加智能摄像头能多角度监测水浸,火势的程度,在图像上一目了然,打破了原来只知道告警信号,而不知道内部环境的影响状况;增加控制回路的水浸传感器,将控制信号传入边缘计算装置,可以快速切断进线开关,防止事故的扩大化;边缘计算装置可以统计烟雾传感器的数量,增加判断依据,根据依据快速切断进线开关,提前一步消除隐患。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
17.图1为本发明用于配电网监测及预判的边缘计算方法流程图;图2为本发明yolo-tiny网络结构示意图;图3为本发明qint8网络结构示意图;图4为本发明环境防水浸工作流程图;图5为本发明水浸传感器外观简图;图6为本发明环境水浸监测及预判方法装置简图;图7为本发明环境防火灾工作流程图;图8为本发明环境火光监测及预判方法装置简图;图9为本发明环境防入侵工作流程图;图10为本发明环境入侵监测及预判方法装置简图;
图11为本发明用于配电网监测及预判的边缘计算装置结构示意图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.本发明的目的是提供一种用于配电网监测及预判的边缘计算方法及装置,能够直观的了解现场配电房的异常情况,避免误发信号或超过阈值不发信号带来的隐患。
20.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
21.本发明通过各类传感器,实时监控配电房内影响正常运行的各类环境变量。针对不同的环境变量,选用对应的传感器。由rs-485线将传感器的输出量传入到边缘计算装置。边缘计算装置在拟定的算法对传入的传感器输出量作出决策。决策结束之后再将结果传送主站。真正做到无需后台介入,本地采集,本地监控,本地决策,进一步提升配电房智能化,自动化,高效化。
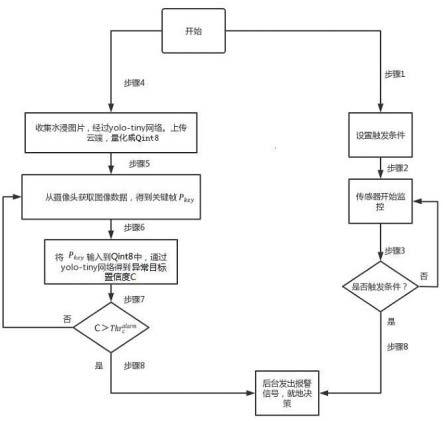
22.图1为本发明一种用于配电网监测及预判的边缘计算方法流程图,如图1所示,所述边缘计算方法包括:步骤1:确定触发条件。
23.对同一环境变量,需要做不同程度的决策,这里可设置多个传感器。
24.步骤2:对环境变量开始监测,得到监测结果。
25.在边缘计算装置的环境监测app保存传感器的输出量,传感器自身工作指示灯也正常工作。
26.步骤3:判断所述监测结果是否满足触发条件;若不满足,则返回步骤2继续进行监测;若满足,则执行步骤8发出警报信号,得到第一数值,即,当触发条件发生时,不同的触发条件在边缘计算装置的环境监测app得到不同的值,记为第一数值。
27.步骤4:收集异常环境监测数据集x={x1,x2,
…
,xn},其中,x1,x2,
…
,xn为异常环境监测数据,对所述异常环境监测数据集x={x1,x2,
…
,xn}进行标记,得到标签数据集y={y1,y2,
…
,yn},其中,y1,y2,
…
,yn为标签数据;基于所述异常环境监测数据集x={x1,x2,
…
,xn}和所述标签数据集y={y1,y2,
…
,yn}确定训练集d={x,y};将数据集d={x,y}和yolo-tiny网络q上传云平台进行训练后量化成模型qint8。参见图2和图3,图2为本发明yolo-tiny网络结构示意图;图3为本发明qint8网络结构示意图,训练过程如下:将样本数据集依次通过主干网络、特征金字塔网络、检测头、编解码器进行处理,将解码器输出进行非极大值抑制处理后得到检测结果。将标签数据进行编码后,结合检测头的输出进行损失函数处理,然后将结果通过梯度反向传播送入检测头。其中,样本数据集通过主干网络处理的过程为:依次通过卷积单元(208,208,32)、卷积单元(104,104,64)、残
差单元(52,52,128)、残差单元(26,26,256)、残差单元(13,13,512)、卷积单元(13,13,512)。残差单元(26,26,256)的输出通过主干层1送入特征金字塔网络的通道拼接(26*26*384)模块。卷积单元(13,13,512)的输出通过主干层2送入特征金字塔网络的卷积(13*13*512)模块之后,通过卷积(13*13*128)+上采样(26*26*128)模块处理后送入通道拼接(26*26*384)模块,与前述通过主干层1送来的残差单元(26,26,256)的输出数据进行拼接处理后,送入检测头1。特征金字塔的卷积(13*13*512)模块输出数据送入检测头2进行处理。检测头1的处理结果送入解码器进行处理。检测头1和检测头2的输出都送入损失函数模块进行处理。
28.步骤5:获取配电房内视频图像,滤除所述视频图像中的冗余帧,得到异常环境关键帧。
29.调用视频采集设备,获取视频图像,通过千兆网口传入到边缘计算装置对应的监测app。并通过mqtt消息总线写入数据中心。滤除异常环境冗余帧,得到异常环境关键帧p
key
,具体步骤如下:步骤5.1:从摄像头获取连续的四帧图像。
30.步骤5.2:将图片缩放到合适尺寸后转换为灰度图片,并进行高斯滤波,高斯滤波卷积核公式为:其中,(xc,yc)为卷积核当前中心点坐标,为卷积核对应的方差。
31.步骤5.3:滤波后得到图片,对做差:其中,dif 1
和dif 2
为灰度图片相减后得到的灰度特征图。
32.步骤5.4:对dif 1
和dif 2
自动填充,填充方式为:其中,thrs为色差,即dif 1
和dif 2
的阈值,dif为二值图像灰度值,dif
i,j
为灰度图片像素坐标点的特征值。
33.步骤5.5:将dif 1
和dif 2
调整为一维向量,对dif 1
和dif 2
求余弦相关系数corr:
其中,为的分量,n为的分量总数。
34.步骤5.6:摄像头获取下一帧图片p4:。
35.步骤5.7:判断所述余弦相关系数corr是否大于门限值thr
corr
,若corr》thr
corr
,则输出关键帧p
key
=p4,否则,返回步骤5.2。
36.步骤6:将所述异常环境关键帧输入到所述训练好的神经网络中,得到异常目标置信度。
37.即,将异常环境关键帧p
key
输入检测网络qint8中,通过yolo-tiny网络检测出异常目标置信度c。
38.步骤7:判断所述置信度是否大于预设阈值。
39.若c》,立即将这一信号传入边缘计算装置,在对应的监测app设定一个数值,记为第二数值,执行步骤8,否则执行步骤5。
40.步骤8:对于同一物理变量,有两种不同类型的检测设备,传感器和智能摄像头。因此,在决策时,传感器所占权重设定为g1,智能摄像头所占权重设定为g2。依据公式y=g1*第一数值+g2*第二数值作出决策。
41.实施例1当环境变量为水位时,对于水浸的识别与处理,现场配电房主要有两个水浸传感器和一个智能摄像头,以及一台边缘计算装置组成,具体如图6所示。
42.参见图4,本发明中的环境防水浸工作流程包括以下步骤:针对水浸传感器,图5为水浸传感器外观简图。
43.步骤1:设置高度h1和h2,h2大于h1。将水浸传感器1探针放置在h1处。水浸传感器2探针放置在h2米处。对于水浸传感器1,设定为当水位越过h1时,触发边缘计算装置的告警信号,以便提醒后台人员关注水位信息。对于水浸传感器2,设定为当水位越过h2时,触发边缘计算装置的控制信号,跳开配电房的进线开关,提前一步消除隐患。
44.步骤2:水浸传感器开始监测水位,对于边缘计算装置而言,水浸传感器输出量仅仅是一个开关量,对水位进行最简单的“是或否”判断。水浸传感器1和水浸传感器2通过rs485线传入到边缘计算装置配电房环境监测app。并通过mqtt消息总线写入数据中心。在正常工作状态下,水位未越线时,水浸传感器1和水浸传感器2的
‘
power’灯保持常亮。
45.步骤3:当水浸传感器1检测到水位已越过水位警戒线h1时,立即将这一信号传入边缘计算装置。在配电房环境监测app设定一个数值a=20,同时水浸传感器1的
‘
alarm’灯保持常亮。当水浸传感器1检测到水位已越过水位警戒线h1时执行步骤9,否则执行步骤2。
46.步骤4:当水浸传感器2检测到水位已越过水位警戒线h2时,立即将这一信号传入
边缘计算装置在配电房环境监测app设定一个数值b=1,同时水浸传感器2的
‘
alarm’灯保持常亮。当水浸传感器2检测到水位已越过水位警戒线h2时,执行步骤9,否则执行步骤2。
47.针对摄像头步骤5:收集水浸数据集x={x1,x2,
…
,xn},并对其进行标记得到对应的标签数据集y={y1,y2,
…
,yn},得到数据集d=(x,y)。将数据集d=(x,y)和yolo-tiny网络q上传云平台进行训练后量化成模型qint8。
48.步骤6:调用视频采集设备,获取视频图像,通过千兆网口传入到边缘计算装置水浸监测app。并通过mqtt消息总线写入数据中心。滤除水浸冗余帧,得到水浸关键帧p
key
。
49.步骤7:将水浸关键帧p
key
输入检测网络qint8中,通过yolo-tiny网络检测出异常目标置信度c。
50.步骤8:若c》,立即将这一信号传入边缘计算装置,在浸水监测app设定一个数值d=1,若c》,执行步骤9,否则执行步骤5。
51.针对边缘计算装置步骤9:对于同一物理变量,有两种不同类型的检测设备。水浸传感器作为主要决策设备,智能摄像头作为辅助设备。因此,在决策时,水浸传感器所占权重必须大于智能摄像头。依据公式z=2*(a+b)+d出决策:若z≥4,则边缘计算装置跳开进线开关通知主站;若0《z《3,则触发告警信号,边缘计算装置上报图片通知主站。
52.实施例2当环境变量为烟雾时,对于火灾的识别与处理,现场配电房根据配电房的占地面积大小需要配备多个烟雾传感器以及喷淋。同时也包括一个智能摄像头,以及一台边缘计算装置组成,具体如图8所示。
53.参见图7,本发明中的环境防火灾工作流程主要包括以下步骤:针对烟雾传感器步骤1:确定现场配电房的烟雾。设备总数量为max,保存在配电房环境app中。当一部分传感器被触发时,触发边缘计算控制装置喷淋释放灭火干粉。当全部烟雾传感器被触发时,触发边缘计算控制装置跳开配电房的进线开关,提前一步消除隐患。
54.步骤2:烟雾传感器开始工作,对于边缘计算装置而言,烟雾传感器输出量仅仅是一个开关量,对烟雾出现进行最简单的“是或否”判断。烟雾传感器通过rs485线传入到边缘计算装置配电房环境监测app。并通过mqtt消息总线写入数据中心。在正常工作状态下,传感器指示灯正常状态时为熄灭状态,间隔30秒闪烁一次。
55.步骤3:当某个烟雾传感器如果监测到烟雾浓度达到触发报警值,立即将这一信号传入边缘计算装置。在配电房环境监测app记录报警的烟雾传感器数量,将数量的值赋予m1,同时报警的烟雾传感器的传感器指示灯常亮。当监测到烟雾浓度达到触发报警值时,执行步骤8,否则执行步骤2。
56.针对摄像头步骤4:收集火光数据集x={x1,x2,
…
,xn},并对其进行标记得到对应的标签数据集y={y1,y2,
…
,yn},得到数据集d=(x,y)。将数据集d=(x,y)和yolo-tiny网络q上传云平台进行训练后量化成模型qint8。
57.步骤5:调用视频采集设备,获取视频图像,通过千兆网口传入到边缘计算装置火光监测app。并通过mqtt消息总线写入数据中心。滤除火光冗余帧,得到火光关键帧p
key
。
58.步骤6:将火光关键帧p
key
输入检测网络qint8中,通过yolo-tiny网络检测出异常目标置信度c。
59.步骤7:若c》,立即将这一信号传入边缘计算装置,在火光监测app设定一个数值m2=1,若c》执行步骤9,否则执行步骤5。
60.针对边缘计算装置步骤8:对于同一物理变量,有两种不同类型的检测设备。烟雾传感器作为主要决策设备,智能摄像头作为辅助设备。因此,在决策时,烟雾传感器所占权重必须大于智能摄像头。依据公式l=2*m1+m2出决策:若l≥2*max,则边缘计算装置跳开进线开关通知主站;若0《l《2*max,则触发告警信号喷淋释放灭火干粉,边缘计算装置上报图片通知主站。
61.实施例3当环境变量为门状态时,对于入侵的识别与处理,现场配电房根据配电房的房门数量配备对应的门状态传感器以及警示器。同时也包括一个智能摄像头,以及一台边缘计算装置组成,具体如图10所示。
62.参见图9,本发明中的环境防入侵工作流程包括以下步骤:针对门状态传感器步骤1:门状态传感器开始工作,对于边缘计算装置而言,门状态传感器输出量仅仅是一个开关量,对门开合进行最简单的“是或否”判断。门状态传感器通过rs485线传入到边缘计算装置配电房环境监测app。并通过mqtt消息总线写入数据中心。
63.步骤2:当门状态传感器如果监测到门打开时,立即将这一信号传入边缘计算装置。在配电房环境监测app设定一个值u1=1。若监测到门打开,执行步骤7,否则执行步骤2。
64.针对摄像头步骤3:收集内部人脸数据集x={x1,x2,
…
,xn},并对其进行标记得到对应的标签数据集y={y1,y2,
…
,yn},得到数据集d=(x,y)。将数据集d=(x,y)和yolo-tiny网络q上传云平台进行训练后量化成模型qint8。
65.步骤4:调用视频采集设备,获取视频图像,通过千兆网口传入到边缘计算装置火光监测app。并通过mqtt消息总线写入数据中心。滤除火光冗余帧,得到火光关键帧p
key
。
66.步骤5:将火光关键帧p
key
输入检测网络qint8中,通过yolo-tiny网络检测出异常目标置信度c。
67.步骤6:若c《,立即将这一信号传入边缘计算装置,在入侵监测app设定一个数值u2=1,当c《执行步骤7,否则执行步骤4。
68.针对边缘计算装置步骤7:对于同一物理变量,有两种不同类型的检测设备。智能摄像头作为主要决策设备,门状态传感器作为辅助设备。因此,在决策时,智能摄像头所占权重必须大于门状态传感器。依据公式v=u1+2*u2出决策:若v≥2,则边缘计算装置控制警示器发出警告声,上报图片通知主站;
若0《v《2,则边缘计算装置上报图片通知主站。
69.图11为本发明用于配电网监测及预判的边缘计算装置结构示意图,如图11所示,所述系统包括:触发条件确定模块101,用于确定触发条件。
70.环境变量监测模块102,用于对环境变量开始监测,得到监测结果。
71.第一判断模块103,用于判断所述监测结果是否满足触发条件。
72.第一循环模块104,用于当不满足时,返回“环境变量监测模块”继续进行监测。
73.第一数值确定模块105,用于当满足时,发出警报信号,得到第一数值。
74.异常数据收集模块106,用于收集异常环境监测数据集x={x1,x2,
…
,xn}。
75.数据标记模块107,用于对所述异常环境监测数据集x={x1,x2,
…
,xn}进行标记,得到标签数据集y={y1,y2,
…
,yn}。
76.训练集确定模块108,用于基于所述异常环境监测数据集x={x1,x2,
…
,xn}和所述标签数据集y={y1,y2,
…
,yn}确定训练集d={x,y}。
77.训练模块109,用于采用所述训练集对神经网络进行训练,得到训练好的神经网络。
78.图像获取模块110,用于获取配电房内视频图像。
79.预处理模块111,用于滤除所述视频图像中的冗余帧,得到异常环境关键帧。
80.置信度确定模块112,用于将所述异常环境关键帧输入到所述训练好的神经网络中,得到异常目标置信度。
81.第二判断模块113,用于判断所述置信度是否大于预设阈值。
82.第二循环模块114,用于当小于或等于时,返回“预处理模块”。
83.第二数值确定模块115,用于当大于时,则将这一信号传入边缘计算装置,得到第二数值,执行下一步骤。
84.决策模块116,用于通过边缘计算装置根据所述第一数值和所述第二数值得到决策。
85.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
86.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1