一种用于测试道路稳定性的处理方法及装置与流程
1.本发明涉及计算机技术领域,具体而言,涉及一种用于测试道路稳定性的处理方法及装置。
背景技术:
2.为了测试自动驾驶的各项性能,需要建立道路场景进行仿真测试。在实际场景中,由于一条道路通常被划分为多个车道,以及道路交汇口对应多个方向的道路,因此,即使从位置a经过相同的道路到位置b,也存在多种基于车道的路线。为了保证自动驾驶车辆能够适应实际中的复杂路况,需要测试在自动驾驶车辆在各条基于车道的路线上行驶的稳定性。
3.目前,可以通过手动设置车辆经过从位置a到位置b的多条基于车道的路线,以及根据自动驾驶车辆在各条基于车道的路线上的行驶情况,分别计算自动驾驶车辆在各条基于车道的路线上的稳定性,费时费力,测试效率低。
技术实现要素:
4.根据本发明实施例的第一方面,提供一种用于测试道路稳定性的处理方法,包括:根据各道路交汇口的车道数量、行车方向和交通规则,建立各道路交汇口对应的各车道的连通关系;在接收到路线设置指令之后,从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识;根据所述第一道路和所述第二道路的相对位置,确定预期车道路线;根据所述预期车道路线,在所述第一道路和所述第二道路对应的车道设置不允许通行标识,生成道路交汇口的自动驾驶路线;根据所述路线设置指令中除所述第一道路和所述第二道路以外的直行道路的直行道路标识,以及预设的直行变道规则,生成直行道路的自动驾驶路线;根据所述道路交汇口的自动驾驶路线和所述直行道路的自动驾驶路线,生成全程自动驾驶路线;获取自动驾驶车辆在所述全程自动驾驶路线上的行驶信息;根据所述行驶信息和预设的稳定条件,确定所述自动驾驶车辆在所述全程自动驾驶路线上的稳定性。
5.可选的,所述从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识的步骤,包括:根据预设的道路交汇口的道路集合,从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识;其中,所述预设的道路交汇口的道路集合,包括各道路交汇口分别连接的各条道路的道路标识。
6.可选的,所述根据所述第一道路和所述第二道路之间的夹角,确定预期车道路线的步骤,包括:根据所述第一道路和所述第二道路的相对位置,分别确定所述第一道路中的第一车道,以及所述第二道路中的第二车道;基于所述第一车道和所述第二车道,确定预期车道路线。
7.可选的,所述根据所述第一道路和所述第二道路的相对位置,分别确定所述第一道路中的第一车道,以及所述第二道路中的第二车道的步骤,包括:以所述第一道路为第一视角,确定所述第一道路标识对应的第一道路,与所述第二道路标识对应的第二道路的相对位置;若所述相对位置为所述第二道路在所述第一道路的前侧,则确定所述道路交汇口的通过方式为直行通过;若所述相对位置为所述第二道路在所述第一道路的右侧,则确定所述道路交汇口的通过方式为右转通过;若所述相对位置为所述第二道路在所述第一道路的左侧,则确定所述道路交汇口的通行方式为左转通过;根据已确定的所述道路交汇口的通行方式,基于预设的道路选择规则中优选的车道类型,确定所述第一道路中的第一车道,以及与所述第一车道已建立连通关系的所述第二道路中的车道为第二车道。其中,所述预设的道路选择规则,包括:优选的车道类型,所述车道类型包括混合车道和非混合车道。
8.可选的,所述根据所述预期车道路线,在所述第一道路和所述第二道路对应的车道设置不允许通行标识,生成道路交汇口的自动驾驶路线的步骤,包括:将所述第一道路和所述第二道路中已建立所述连通关系的车道中,除所述预期车道路线对应的车道以外的车道设置不允许通行标识;根据所述连通关系和所述不允许通行标识,生成道路交汇口的自动驾驶路线。
9.根据本发明实施例的第二方面,提供一种用于测试道路稳定性的处理装置,包括:建立模块,用于根据各道路交汇口的车道数量、行车方向和交通规则,建立各道路交汇口对应的各车道的连通关系;第一确定模块,用于在接收到路线设置指令之后,从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识;第二确定模块,用于根据所述第一道路和所述第二道路的相对位置,确定预期车道路线;第一生成模块,用于根据所述预期车道路线,在所述第一道路和所述第二道路对应的车道设置不允许通行标识,生成道路交汇口的自动驾驶路线;第二生成模块,根据所述路线设置指令中除所述第一道路和所述第二道路以外的直行道路的直行道路标识,以及预设的直行变道规则,生成直行道路的自动驾驶路线;第三生成模块,根据所述道路交汇口的自动驾驶路线和所述直行道路的自动驾驶路线,生成全程自动驾驶路线;获取模块,用于获取自动驾驶车辆在所述全程自动驾驶路线上的行驶信息;第二确定模块,用于根据所述行驶信息和预设的稳定条件,确定所述自动驾驶车辆在所述全程自动驾驶路线上的稳定性。
10.可选的,所述第一确定模块,具体用于根据预设的道路交汇口的道路集合,从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识;其中,所述预设的道路交汇口的道路集合,包括各道路交汇口分别连接的各条道路的道路标识。
11.可选的,所述第二确定模块,具体包括第一确定子模块和第二确定子模块;所述第一确定子模块,用于根据所述第一道路和所述第二道路的相对位置,分别确定所述第一道路中的第一车道,以及所述第二道路中的第二车道;所述第二确定子模块,用于基于所述第一车道和所述第二车道,确定预期车道路线。
12.可选的,所述第一确定子模块,具体包括第三确定子模块、第四确定子模块、第五确定子模块、第六确定子模块和第七确定子模块;所述第三确定子模块,用于以所述第一道路为第一视角,确定所述第一道路标识对应的第一道路,与所述第二道路标识对应的第二
道路的相对位置;所述第四确定子模块,用于若所述相对位置为所述第二道路在所述第一道路的前侧,则确定所述道路交汇口的通过方式为直行通过;所述第五确定子模块,用于若所述相对位置为所述第二道路在所述第一道路的右侧,则确定所述道路交汇口的通过方式为右转通过;所述第六确定子模块,用于若所述相对位置为所述第二道路在所述第一道路的左侧,则确定所述道路交汇口的通行方式为左转通过;所述第七确定子模块,用于根据已确定的所述道路交汇口的通行方式,基于预设的道路选择规则中优选的车道类型,确定所述第一道路中的第一车道,以及与所述第一车道已建立连通关系的所述第二道路中的车道为第二车道,其中,所述预设的道路选择规则,包括:优选的车道类型,所述车道类型包括混合车道和非混合车道。
13.可选的,所述第一生成模块,具体包括设置子模块和生成子模块;所述设置子模块,用于将所述第一道路和所述第二道路中已建立所述连通关系的车道中,除所述预期车道路线对应的车道以外的车道设置不允许通行标识;所述生成子模块,用于根据所述连通关系和所述不允许通行标识,生成道路交汇口的自动驾驶路线。
14.本发明实施例的创新点包括:
15.1、可以通过下发路线设置指令,自动设置包括道路交汇口的不同行车路线,以保证测试覆盖率,提高测试效率,无需人工设置,省时省力,是本发明实施例的创新点之一。
16.2、可以通过设置预设的道路选择规则,设置对于同一道路的不同车道的选择标准,实现即使同一预期的路线,在经过同一个道路交汇口也可以有不同的通过路线的效果,以提高测试覆盖率。是本发明实施例的创新点之一。
17.3、可以基于道路交汇口已设置的连通关系,通过对车道设置不允许通过标识,限制自动驾驶车辆经过道路交汇口的具体通过路线,而无需手动设置,从而提高测试效率。是本发明实施例的创新点之一。
18.4、可以根据预设的直行变道规则,从直行车道的多个车道上选择基于车道的直行道路的自动驾驶路线,以提高直行车道的测试覆盖率。是本发明实施例的创新点之一。
19.5、可以获取自动驾驶车辆在生成的各全程自动驾驶路线上的行驶信息,来计算各自动驾驶车辆在各全程自动驾驶路线上的稳定信息。是本发明实施例的创新点之一。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
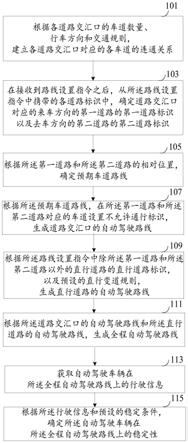
21.图1为本发明的用于测试道路稳定性的处理方法的处理流程示意图;
22.图2a为本发明中的道路交汇口的连通关系的示意图。
23.图2b为本发明中步骤105的处理流程示意图;
24.图3为本发明中子步骤21的处理流程示意图;
25.图4为本发明中步骤107的处理流程示意图;
26.图5为本发明的用于测试道路稳定性的处理装置的结构示意图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.需要说明的是,本发明实施例及附图中的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
29.本发明实施例公开了一种用于测试道路稳定性的处理方法及装置。以下分别进行详细说明。
30.本发明提出了一种用于测试道路稳定性的处理方法,参考图1,图1为本发明的车道处理方法的处理流程示意图。如图1所示,用于测试道路稳定性的处理方法包括如下步骤:
31.步骤101,根据各道路交汇口的车道数量、行车方向和交通规则,建立各道路交汇口对应的各车道的连通关系。
32.其中,道路交汇口对应的各车道,是指汇集在该道路交汇口的各车道。道路交汇口包括多车道路口、十字路口、丁字路口、岔道口等。
33.比如,道路交汇口为十字路口,该十字路口对应的四个方向的道路均为四车道,那么,汇集在该十字路口的车道共有十六条。
34.又比如,道路交汇口为丁字路口,该丁字路口对应的三个方向的道路均为两车道,那么,汇集在该丁字路口的车道共有六条。
35.在本步骤中,可以按照各道路交汇口的车道数量、行车方向和交通规则,建立各车道的连通关系,使得自动驾驶的车辆能够按照连通关系,通过该道路交汇口。
36.其中,交通规则可以包括左转车道、右转车道、直行车道、左转加直行车道、右转加直行车道等等。
37.比如,参考图2a,图2a为本发明中的道路交汇口的连通关系的示意图。如图2a所示,十字路口,按照上北下南左西右东区分四个道路,分别为南向道路、北向道路、东向道路和西向道路,各道路均为两车道,包括左转加直行车道和右转车道;可以按照车道数量、行车方向以及交通规则,建立的各车道的连通关系包括:11车道分别与15车道和2车道连通,12车道与8车道连通,6车道分别与2车道和10车道连通,5车道与16车道连通,14车道分别于10车道和3车道连通,13车道与1车道连通,3车道分别与7车道和15车道连通,4车道与9车道连通。
38.步骤103,在接收到路线设置指令之后,从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识。
39.在本步骤中,首先,用户可以根据测试需求,确定车辆行驶的预期的路线;然后根据预期的路线,下发路线设置指令,路线设置指令中携带多个路段的道路标识,多个路段组成预期的路线,一个路段对应一个道路标识,可以理解的,多个道路标识能够体现预期的路
线;接下来,根据预设的道路交汇口的道路集合,从路线设置指令中携带的各道路标识中,将对应同一道路交汇口的两个道路标识选出来。
40.其中,道路交汇口的道路集合是指各道路交汇口对应的两个道路的道路标识的集合,具体包括来车方向的第一道路的第一道路标识和去车方向的第二道路的第二道路标识。
41.比如,如图2a所示,已知十字路口a的西向道路的道路标识为001,东向道路的道路标识为002;路线设置指令中携带的多个道路标识,包括010、011、031、042、034、001、002、099、043,可以根据道路交汇口的道路集合,确定001和002为十字路口a对应的两个道路标识。
42.这样,可以通过下发路线设置指令,测试自动驾驶的不同行车路线,具体的,可以通过测试自动化的方式,自动下发包括不同道路标识的路线设置指令,使得路线设置指令能够覆盖所有待测试的行车路线,以保证测试覆盖率,提高测试效率,无需人工设置,省时省力。
43.步骤105,根据所述第一道路和所述第二道路的相对位置,确定预期车道路线。
44.在本步骤中,可以根据道路交汇口的来车方向的第一道路,以及去车方向的第二道路的相对位置,确定车辆行驶的预期的路线在通过该道路交汇口的通行方式,通行方式具体可以包括直行、右转弯和左转弯;然后,根据已确定的通行方式,确定预期的路线对应的预期车道路线。
45.需要说明的是,预期的路线是基于道路的,不区分车道,完成预期的路线可以对车道有不同的选择方式,而预期车道路线是基于车道的,更加具体。
46.可选的,参考图2b,图2b为本发明中步骤105的处理流程示意图。如图2b所示,步骤105具体可以包括:
47.子步骤21,根据所述第一道路和所述第二道路的相对位置,分别确定所述第一道路中的第一车道,以及所述第二道路中的第二车道。
48.具体的,可以根据道路交汇口的来车方向的第一道路,以及去车方向的第二道路之间的相对位置,确定车辆行驶的预期的路线在通过该道路交汇口的通行方式,进而基于第一道路和第二道路内不同车道的行车方向,确定第一道路中的第一车道和第二道路中的第二车道。
49.比如,通行方式为左转,则第一道路的第一车道为左转车道或左转加直行车道,第二道路的第二车道为与所述第一车道已建立连通关系的车道。
50.可选的,参考图3,图3为本发明中子步骤21的处理流程示意图。如图3所示,子步骤21具体可以包括:
51.子步骤31,以所述第一道路为第一视角,确定所述第一道路标识对应的第一道路,与所述第二道路标识对应的第二道路的相对位置。
52.子步骤32,若所述相对位置为所述第二道路在所述第一道路的前侧,则确定所述道路交汇口的通过方式为直行通过。
53.子步骤33,若所述相对位置为所述第二道路在所述第一道路的右侧,则确定所述道路交汇口的通过方式为右转通过。
54.子步骤34,若所述相对位置为所述第二道路在所述第一道路的左侧,则确定所述
道路交汇口的通行方式为左转通过。
55.具体的,可以通过第一道路和第二道路的相对位置来确定预期的路线在经过道路交汇口的通过方式。具体的,可以以所述第一道路为第一视角,确定所述第一道路标识对应的第一道路,与所述第二道路标识对应的第二道路的相对位置。
56.若所述第二道路在所述第一道路的前侧,则可以说明沿预期的路线的车辆在经过道路交汇口后未转弯,进而确定所述道路交汇口的通过方式为直行通过。
57.若所述第二道路在所述第一道路的右侧,则可以说明沿预期的路线的车辆在经过道路交汇口后右转,进而确定所述道路交汇口的通过方式为右转通过。
58.若所述第二道路在所述第一道路的左侧,则可以说明沿预期的路线的车辆在经过道路交汇口后左转,进而确定所述道路交汇口的通行方式为左转通过。
59.子步骤35,根据已确定的所述道路交汇口的通行方式,基于预设的道路选择规则中优选的车道类型,确定所述第一道路中的第一车道,以及与所述第一车道已建立连通关系的所述第二道路中的车道为第二车道。
60.其中,所述预设的道路选择规则,包括:优选的车道类型,所述车道类型包括混合车道和非混合车道。
61.具体的,若通过方式为直行方式,且第一道路中具有直行功能的车道包括直行车道、直行加左转车道、直行加右转车道,那么,当预设的道路选择规则中的优选的车道类型为非混合车道时,选择第一道路中的直行车道作为第一车道,当预设的道路选择规则中的优选的车道类型为混合车道时,选择第一道路中的直行加左转车道或直行加右转车道作为第一车道。
62.若通过方式为左转方式,且第一道路中具有左转功能的车道包括左转车道和直行加左转车道,那么,当预设的道路选择规则中的优选的车道类型为非混合车道时,选择第一道路中的左转车道作为第一车道,当预设的道路选择规则中的优选的车道类型为混合车道时,选择第一道路中的直行加左转车道作为第一车道。
63.若通过方式为右转方式,且第一道路中具有右转功能的车道包括右转车道和直行加右转车道,那么,当预设的道路选择规则中的优选的车道类型为非混合车道时,选择第一道路中的右转车道作为第一车道,当预设的道路选择规则中的优选的车道类型为混合车道时,选择第一道路中的直行加右转车道作为第一车道。
64.子步骤22,基于所述第一车道和所述第二车道,确定预期车道路线。
65.具体的,可以基于已确定的第一道路的第一车道,以及第二道路的第二车道,确定自动驾驶待执行的预期车道路线。
66.需要说明的是,上面提到的自动驾驶待执行的预期车道路线,只是根据预期的路线细化得到的基于车道的预期车道路线,但是还未通过设置使得自动驾驶能够按照上述预期车道路线进行行驶。
67.可见,可以通过设置预设的道路选择规则,使得同一预期的路线对应不同的预期车道路线,具体的,即使同一预期的路线,在经过同一个道路交汇口也可以有不同的通过路线,具体的,可以以测试自动化的方式,自动设置预设的道路选择规则,使得预期车道路线能够覆盖所有可能的场景,提高测试覆盖率。
68.此外,所述预设的道路选择规则还可以包括变道规则,变道规则可以用于确定预
期的路线中除道路交汇口以外的直行道路的车道,具体如下:
69.基于预设的道路选择规则中的所述变道规则,根据所述路线设置指令中除所述第一道路标识和所述第二道路标识以外的直行道路标识,确定所述直行道路标识对应的直行道路的直行车道,所述直行车道与所述第一道路或所述第二道路连接。
70.具体的,还可以通过设置直行道路的直行车道,对预期的路线中的直行道路的车道进行规划,提高测试覆盖面。
71.步骤107,基于所述预期车道路线和所述连通关系,在所述第一道路和所述第二道路对应的车道设置不允许通行标识,生成道路交汇口的自动驾驶路线。
72.在本步骤中,由于在已建立的连通关系中,车辆可以以任一路线通过道路交汇口,为了能够测试经过同一个道路交汇口的多重路线,可以按照之前确定的预期车道路线来执行本次测试,因此,可以通过在第一道路和第二道路的车道内设置不允许通行标识,使得自动驾驶车辆能够按照已确定的预期车道路线通过该道路交汇口,保证测试效果。
73.上述处理过程可以是一个循环的执行过程,可以根据车道选择规则,即使是同一个路线,也在每次测试中走不同的车道,进而可以遍历到所有的车道路线,提高测试效果。
74.可选的,参考图4,图4为本发明中步骤107的处理流程示意图。如图4所示,步骤107具体可以包括:
75.子步骤41,将所述第一道路和所述第二道路中已建立所述连通关系的车道中,除所述预期车道路线对应的车道以外的车道设置不允许通行标识。
76.具体的,可以在步骤101中,第一道路和第二道路中已建立连通关系的车道中,除第一车道和第二车道组成的预期车道路线以外的车道设置不允许通行标识,也即只允许车辆以预期车道路线,经过道路交汇口,从而限制自动驾驶车辆经过道路交汇口的路线。
77.比如,第一道路有三个车道与第二道路已建立连通关系,分别为左转车道、直行车道和右转车道,由于预期车道路线为直行通过,那么,可以将左转车道和右转车道均设置上不允许通过标识,使得车辆只能通过第一道路的直行车道经过该道路交汇口。
78.子步骤42,根据所述连通关系和所述不允许通行标识,生成道路交汇口的自动驾驶路线。
79.这样,可以基于道路交汇口已设置的连通关系,通过对车道设置不允许通过标识,限制自动驾驶车辆经过道路交汇口的具体通过路线,也即道路交汇口的自动驾驶路线,而无需手动设置,从而提高测试效率。
80.步骤109,根据所述路线设置指令中除所述第一道路和所述第二道路以外的直行道路的直行道路标识,以及预设的直行变道规则,生成直行道路的自动驾驶路线。
81.需要说明的是,路线设置指令中包括直行道路的道路标识和道路交汇口对应的道路标识。
82.在本步骤中,可以根据路线设置指令中的直行道路的道路标识,基于预设的直行变道规则,生成基于车道的、针对直行道路的自动驾驶路线。
83.其中,预设的直行变道规则,包括在直行道路上的第一变道规则,以及在接近道路交汇口时的第二变道规则。
84.第一变道规则可以包括:直行变道距离和直行变道方式。
85.比如,若直行变道距离为100米,那么车辆在直行道路中,每行驶100米即变道一
次,若直行变道方式为临近车道变道,那么车辆在直行道路中,每次均变道到临近车道。
86.又比如,若直行变道距离为200米,那么车辆在直行道路中,每行驶200米即变道一次,若直行变道方式为隔车道变道,那么车辆在直行道路中,每次均变道均从当前的车道1,经临近车道2,最终变道至车道2旁的车道3,也即连续变道两次。
87.第二变道规则可以包括:道路交汇口变道距离。
88.比如,若道路交汇口变道距离为100米,那么车辆在距道路交汇口100米处,变道到道路交汇口的自动驾驶路线中,若一次变道没有到达道路交汇口的自动驾驶路线中,则隔预设时段之后,再次变道到临近车道,如此重复变道直到到达道路交汇口的自动驾驶路线中。
89.步骤111,根据所述道路交汇口的自动驾驶路线和所述直行道路的自动驾驶路线,生成全程自动驾驶路线。
90.在本步骤中,结合道路交汇口的自动驾驶路线和直行道路的自动驾驶路线,生成全程自动驾驶路线。可以理解的,上述自动驾驶路线均基于车道。
91.步骤113,获取自动驾驶车辆在所述全程自动驾驶路线上的行驶信息。
92.在本步骤中,在确定全程自动驾驶路线之后,自动驾驶车辆可以行驶在全程自动驾驶路线上,可以获取自动驾驶车辆在全程自动驾驶路线上的行驶信息。
93.其中,行驶信息可以包括:行驶时长,行驶轨迹和行驶速度。可以理解的,通过行驶信息,能够了解自动驾驶的行驶情况。
94.比如,自动驾驶车辆由于无法确定路线,可能出现暂停,那么,行驶时长就会较长,行驶速度也低于常规速度。
95.又比如,根据自动驾驶车辆的行驶轨迹,可以确定自动驾驶车辆是否按照已生成的全程自动驾驶路线进行行驶。
96.步骤115,根据所述行驶信息和预设的稳定条件,确定所述自动驾驶车辆在所述全程自动驾驶路线上的稳定性。
97.其中,预设的稳定条件包括预设行驶时长和预设行驶速度,以及已生成的全程自动驾驶路线。
98.在本步骤中,可以根据获取到的行驶信息和预设的稳定条件,确定自动驾驶车辆在已生成的全程自动驾驶路线上行驶的稳定性。具体的,可以通过判断行驶信息中的行驶速度是否符合预设行驶速度,行驶信息中的行驶时长是否符合预设行驶时长,行驶信息中的行驶轨迹是否符合已生成的全程自动驾驶路线,来确定自动驾驶车辆在全程自动驾驶路线上的稳定性。
99.具体的,稳定性可以分为四级,其中,一级为最高,表示稳定性最高,四级为最低,表示稳定性最差。
100.若行驶信息中的行驶时长、行驶速度和行驶轨迹均符合预设条件,则确定自动驾驶车辆在全程自动驾驶路线上的稳定性为一级,稳定性很高。
101.若行驶信息中的行驶时长、行驶速度和行驶轨迹中的任两项均符合预设条件,则确定自动驾驶车辆在全程自动驾驶路线上的稳定性为二级,稳定性较高。
102.若行驶信息中的行驶时长、行驶速度和行驶轨迹中的任一项均符合预设条件,则确定自动驾驶车辆在全程自动驾驶路线上的稳定性为三级,稳定性较低。
103.若行驶信息中的行驶时长、行驶速度和行驶轨迹均不符合预设条件,则确定自动驾驶车辆在全程自动驾驶路线上的稳定性为四级,稳定性最差。
104.可以理解的,对于较差稳定性对应的全程自动驾驶路线,在实际应用中较为容易出错,应加强测试,对处理算法进行改进,提升自动驾驶车辆在该全程自动驾驶路线上的稳定性。
105.可见,本发明能够通过路线设置指令、预设的道路选择规则和预设的直行变道规则的设置,自动生成多种包括道路交汇口和直行道路的不同通过路线的自动驾驶路线,具体的,能够通过设置路线设置指令和预设的道路选择规则,限制自动驾驶车辆经过道路交汇口的通过路线,以及根据预设的直行变道规则,确定直行道路上的直行自动驾驶路线,实现自动遍历道路交汇口和直行道路的全程自动驾驶路线,无需手动逐一进行设置,以及对于各条全程自动驾驶路线均可以进行稳定性测试,省时省力,提高测试的覆盖面和测试效果,保证测试效果。
106.本发明提出了一种用于测试道路稳定性的处理装置,参考图5,图5为本发明的用于仿真测试的车道处理装置的结构示意图。如图5所示,用于测试道路稳定性的处理装置50包括:
107.建立模块501,用于根据各道路交汇口的车道数量、行车方向和交通规则,建立各道路交汇口对应的各车道的连通关系;
108.第一确定模块502,用于在接收到路线设置指令之后,从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识;
109.第二确定模块503,用于根据所述第一道路和所述第二道路的相对位置,确定预期车道路线;
110.第一生成模块504,用于根据所述预期车道路线,在所述第一道路和所述第二道路对应的车道设置不允许通行标识,生成道路交汇口的自动驾驶路线;
111.第二生成模块505,根据所述路线设置指令中除所述第一道路和所述第二道路以外的直行道路的直行道路标识,以及预设的直行变道规则,生成直行道路的自动驾驶路线;
112.第三生成模块506,根据所述道路交汇口的自动驾驶路线和所述直行道路的自动驾驶路线,生成全程自动驾驶路线;
113.获取模块507,用于获取自动驾驶车辆在所述全程自动驾驶路线上的行驶信息;
114.第二确定模块508,用于根据所述行驶信息和预设的稳定条件,确定所述自动驾驶车辆在所述全程自动驾驶路线上的稳定性。
115.可选的,第一确定模块502,具体用于根据预设的道路交汇口的道路集合,从所述路线设置指令中携带的各道路标识中,确定道路交汇口对应的来车方向的第一道路的第一道路标识以及去车方向的第二道路的第二道路标识;
116.其中,所述预设的道路交汇口的道路集合,包括各道路交汇口分别连接的各条道路的道路标识。
117.可选的,第二确定模块503,具体包括第一确定子模块和第二确定子模块,
118.所述第一确定子模块,用于根据所述第一道路和所述第二道路的相对位置,分别确定所述第一道路中的第一车道,以及所述第二道路中的第二车道;
119.所述第二确定子模块,用于基于所述第一车道和所述第二车道,确定预期车道路线。
120.可选的,所述第一确定子模块,具体包括第三确定子模块、第四确定子模块、第五确定子模块、第六确定子模块和第七确定子模块;
121.所述第三确定子模块,用于以所述第一道路为第一视角,确定所述第一道路标识对应的第一道路,与所述第二道路标识对应的第二道路的相对位置;
122.所述第四确定子模块,用于若所述相对位置为所述第二道路在所述第一道路的前侧,则确定所述道路交汇口的通过方式为直行通过;
123.所述第五确定子模块,用于若所述相对位置为所述第二道路在所述第一道路的右侧,则确定所述道路交汇口的通过方式为右转通过;
124.所述第六确定子模块,用于若所述相对位置为所述第二道路在所述第一道路的左侧,则确定所述道路交汇口的通行方式为左转通过;
125.所述第七确定子模块,用于根据已确定的所述道路交汇口的通行方式,基于预设的道路选择规则中优选的车道类型,确定所述第一道路中的第一车道,以及与所述第一车道已建立连通关系的所述第二道路中的车道为第二车道,其中,所述预设的道路选择规则,包括:优选的车道类型,所述车道类型包括混合车道和非混合车道。
126.可选的,第一生成模块504,具体包括设置子模块和生成子模块,
127.所述设置子模块,用于将所述第一道路和所述第二道路中已建立所述连通关系的车道中,除所述预期车道路线对应的车道以外的车道设置不允许通行标识;
128.所述生成子模块,用于根据所述连通关系和所述不允许通行标识,生成道路交汇口的自动驾驶路线。
129.可见,本发明提出的用于测试道路稳定性的处理装置,能够通过路线设置指令、预设的道路选择规则和预设的直行变道规则的设置,自动生成多种包括道路交汇口和直行道路的不同通过路线的自动驾驶路线,具体的,能够通过设置路线设置指令和预设的道路选择规则,限制自动驾驶车辆经过道路交汇口的通过路线,以及根据预设的直行变道规则,确定直行道路上的直行自动驾驶路线,实现自动遍历道路交汇口和直行道路的全程自动驾驶路线,无需手动逐一进行设置,以及对于各条全程自动驾驶路线均可以进行稳定性测试,省时省力,提高测试的覆盖面和测试效果,保证测试效果。
130.本领域普通技术人员可以理解:附图只是一个实施例的示意图,附图中的模块或流程并不一定是实施本发明所必须的。
131.本领域普通技术人员可以理解:实施例中的装置中的模块可以按照实施例描述分布于实施例的装置中,也可以进行相应变化位于不同于本实施例的一个或多个装置中。上述实施例的模块可以合并为一个模块,也可以进一步拆分成多个子模块。
132.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1