一种实时道路信息采集装置的制作方法
[0001]
本实用新型涉及道路信息监测采集技术领域,尤其涉及一种实时道路信息采集装置。
背景技术:
[0002]
无人驾驶技术在开发的过程中,需要大量的真实道路场景来进行不断地学习和升级。现有的数据大多都由无人驾驶车辆自己去道路采集,但真实的道路环境一般还不能让无人驾驶车辆自由地行驶,因此无人驾驶车辆无法采集足够的信息,以支撑无人驾驶的深度学习使用,造成现在无人驾驶开发面临着场景标注和深度学习的数据不足的情况。
技术实现要素:
[0003]
本实用新型的目的是提供一种实时道路信息采集装置,可以放置于道路旁边,快速获取被测真实道路环境中的行人和车辆的数量、尺寸、速度、方向等信息,用于无人驾驶的深度学习。
[0004]
为实现上述目的,采用以下技术方案:
[0005]
一种实时道路信息采集装置,包括支撑架、设于支撑架顶部的采集器、用于控制采集器工作的主机,以及用于供电的电池;所述采集器包括仪器外壳,以及安装于仪器外壳上的监控相机、雷达、陀螺仪、全球定位模块;所述仪器外壳的侧面对应监控相机、雷达分别开设有透视窗;所述监控相机用于采集被测道路的实时图像信息,雷达用于采集被测道路车辆的速度和尺寸信息,陀螺仪用于校准支撑架角度和与水平面的偏差角度以及记录采集器的朝向,全球定位模块用于记录采集点的位置信息;所述支撑架用于升高采集器,以使监控相机、雷达可以扫过整个被测道路环境。
[0006]
较佳地,所述主机包括主机外壳,以及内置于主机外壳的主控模块、交换机、雷达控制器;所述雷达控制器经交换机连接至主控模块;所述主控模块用于控制监控相机、陀螺仪、全球定位模块及通过雷达控制器控制雷达工作,并接收及处理监控相机、雷达、陀螺仪、全球定位模块的采集信息。
[0007]
较佳地,所述电池经第一电压转换模块给主控模块供电,经第二电压转换模块给装置的其他部分供电。
[0008]
较佳地,所述主机外壳上还设有rj-45接口,rj-45接口经交换机连接至主控模块。
[0009]
较佳地,所述主机外壳上还设有usb接口。
[0010]
较佳地,还包括移动硬盘,用于储存监控相机、雷达、陀螺仪、全球定位模块的采集信息。
[0011]
较佳地,所述主机经航空插头与采集器连接。
[0012]
较佳地,所述支撑架撑开后的高度大于或等于3m。
[0013]
采用上述方案,本实用新型的有益效果是:
[0014]
支撑架将采集器升高以使监控相机、雷达高于被测车辆,可以让监控相机和雷达
扫过整个被测道路环境,记录下这个采集点道路环境中的车辆尺寸和速度,通过陀螺仪可以判断车流来去向,并通过移动硬盘储存下来,实现全面采集道路车流和行人信息,整体结构紧凑,方便携带。此外,采集的信息可以通过连接usb接口或rj-45接口拷贝出来。
附图说明
[0015]
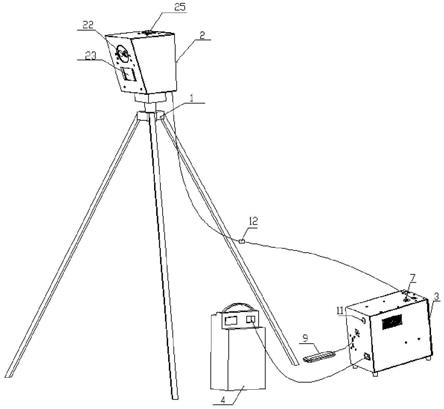
图1为本实用新型的立体图;
[0016]
图2为本实用新型的采集器的爆炸图;
[0017]
图3为本实用新型的主机的爆炸图;
[0018]
图4为本实用新型的原理性框图;
[0019]
其中,附图标识说明:
[0020]
1—支撑架,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—采集器,
[0021]
3—主机,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4—电池,
[0022]
5—第一电压转换模块,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6—第二电压转换模块,
[0023]
7—rj-45接口,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8—usb接口,
[0024]
9—移动硬盘,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10—集线器,
[0025]
11—开关,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12—航空插头,
[0026]
21—仪器外壳,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22—监控相机,
[0027]
23—雷达,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24—陀螺仪,
[0028]
25—全球定位模块,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31—主机外壳,
[0029]
32—主控模块,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33—交换机,
[0030]
34—雷达控制器,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
251—全球定位天线,
[0031]
252—全球定位控制板。
具体实施方式
[0032]
以下结合附图和具体实施例,对本实用新型进行详细说明。
[0033]
参照图1至4所示,本实用新型提供一种实时道路信息采集装置,包括支撑架1、设于支撑架1顶部的采集器2、用于控制采集器2工作的主机3,以及用于供电的电池4;所述采集器2包括仪器外壳21,以及安装于仪器外壳21上的监控相机22、雷达23、陀螺仪24、全球定位模块25;全球定位模块25包括全球定位天线251及全球定位控制板252。
[0034]
所述仪器外壳21的侧面对应监控相机22、雷达23分别开设有透视窗;所述监控相机22用于采集被测道路的实时图像信息,雷达23用于采集被测道路车辆的速度和三维尺寸信息。陀螺仪24固定在仪器外壳21上,陀螺仪24用于校准支撑架1角度和与水平面的偏差角度,陀螺仪24采用九轴陀螺仪,其内设有电子罗盘,通过电子罗盘可以记录采集器2的朝向,以推测来车方向;全球定位模块25用于记录采集点的位置信息;所述支撑架1用于升高采集器2,以使监控相机22、雷达23可以扫过整个被测道路环境。
[0035]
其中,所述主机3包括主机外壳31,以及内置于主机外壳31的主控模块32、交换机33、雷达控制器34;所述雷达控制器34经交换机33连接至主控模块32;所述主控模块32用于控制监控相机22、陀螺仪24、全球定位模块25及通过雷达控制器34控制雷达23工作,并接收及处理监控相机22、雷达23、陀螺仪24、全球定位模块25的采集信息。雷达23及监控相机22
的采集信息经主控模块32处理,并输出包括车流量、车速、尺寸、行车方向等信息。雷达23采用多线雷达,多线雷达通过插头与雷达控制器34连接。
[0036]
所述主机外壳31上还设有rj-45接口7,rj-45接口7经交换机33连接至主控模块32。所述主机3经航空插头12与采集器2连接。主机外壳21内还设有集线器2,航空插头12、移动硬盘9、usb接口8经集线器10连接至主控模块32。
[0037]
支撑架1采用三脚架,支撑架1固定放置在地面上与仪器外壳21及安装于其上的部件相连接。支撑架1可以撑开3m或3m以上的高度,以使监控相机22、雷达23扫过绝大多数的车辆上方,以便采集车辆的尺寸信息。本实用新型可以快速获取被测道路的车流特征、速度、方向等信息和实景图像,用于无人驾驶开发时的场景标注和深度学习。
[0038]
仪器外壳21及主机外壳31均包括前壳、盖板,前壳与盖板卡合连接形成空腔,监控相机22、雷达23、全球定位模块25内置于仪器外壳21的空腔,监控相机22经相机固定前壳及相机固定后壳固定至仪器外壳21上,陀螺仪24与仪器外壳21固定。
[0039]
主控模块32、第一/第二电压转换模块5/6、集线器10、交换机33、雷达控制器34内置于主机外壳31的空腔,交换机33经交换机支架安装在主机外壳31内,雷达控制器34经雷达控制器支架安装至主机外壳31内,主机外壳31的侧面设有散热孔,用于对主控模块32散热。开关11设于主机外壳31上,开关11采用带指示灯的开关。
[0040]
电池4采用48v/12ah的,第一/第二电压转换模块5/6都用于将48v转换成12v电压,但是由于主控模块32的电流太大,需要瞬时10a的工作电流,故采用两个电压转换模块5/6转换电池的电压。电池4采用大容量电池,方便整机运行6小时以上,可以使机器长时间地采集道路数据,覆盖更多不同时段的道路场景。
[0041]
主控模块32上连接有储存监控相机22、雷达23、陀螺仪24、全球定位模块25等采集信息的移动硬盘9,及可供外部移动终端(例如手机、笔记本等)连接的usb接口8,usb接口8设于主机外壳31上,连接后就可以通过外部移动终端操作装置开始采集、结束采集、更改数据保存位置等操作,采集后的数据经过处理后储存到移动硬盘9中。
[0042]
以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1