一种用于识别烟雾火焰的报警方法与流程
[0001]
本发明涉及一种用于识别烟雾火焰的报警方法,属消防设备技术领域。
背景技术:
[0002]
目前在市场上有大量的消防监控设备或监控系统,随火灾预警工作起到了重要作用,例如专利公开号为cn206097356u,公开日为20170412,专利申请号为201621019260.4,专利名称为智能火灾声光报警器装置;专利公开号为cn205881094u,公开日为20170111,专利申请号为201620876424.9,专利名称为一种火灾自动报警系统。但在实际火灾检测及报警工作中发现,当前所使用的火灾检测监控设备或系统往往均为基于传统的烟雾传感器、温度传感器实现对检测范围内烟雾浓度检测达到火灾检测及预警作业的需要,且对传感器接收的数据也缺乏精确且高效的数据处理能力,从而一方面造成了当前的火灾检测预警设备仅能满足特定使用条件,使用的灵活性和通用性均相对较差;另一方面也导致对火灾预警的精确性较差,误报、漏报情况较为严重,从而严重影响了火灾预警的安全性和可靠性。
[0003]
针对这一现状,迫切需要开发一种全新的火灾监管识别系统,以满足实际工作的需要。
技术实现要素:
[0004]
针对现有技术上存在的不足,本发明提供一种用于识别烟雾火焰的报警方法,以达到满足实际工作使用需要的目的。
[0005]
为了实现上述目的,本发明是通过如下的技术方案来实现:一种用于识别烟雾火焰的报警方法,包括如下步骤:s1,系统组网,首先构建一个报警服务器,并根据管理工作设置若干报警终端,和根据待监测空间结构,在待监测空间范围内设置若干检测点和若干理论火源点,且每个理论火源点正上方均设一个检测点,然后为各监测点处设置一个烟雾火焰识别终端,且各烟雾火焰识别终端轴线与水平面呈0
°
—90
°
夹角,最后将各检测点的烟雾火焰识别终端及报警终端通过通讯网络与报警服务器建立数据连接;s2,系统设置,完成s1步骤后,首先由报警服务器分别为各烟雾火焰识别终端及报警终端分配独立的通讯地址和硬件识别编码,然后在报警服务器中录入,相应的基于lstm的智能预测系统、深度学习神经网络系统及基于二值化运算的连通域图像识别子系统,完成系统设置;s3,系统学习,完成s2步骤后,报警服务器首先通过各烟雾火焰识别终端持续对待检测范围环境参数进行检测,并将检测后的数据通过基于lstm的智能预测系统、深度学习神经网络系统进行统计运算,获得待检测范围亮度变化率、火焰分布范围、环境温度变化率、空气质量变化率、pm2.5变化速率及空气成分变化率,并将得到的亮度变化率、火焰分布范围、环境温度变化率、空气质量变化率、pm2.5变化速率及空气成分变化率汇总运算,得到火灾判断基准;
s4,火灾判断检测,在完成s3步骤作业后,即可由烟雾火焰识别终端对待检测范围中的烟雾变化及火焰变化进行检测,并将检测到的火焰和烟雾变化数据发送至报警服务器,然后由报警服务器对接收的数据与s3步骤获得的火灾判断基准进行比对,即可得到火灾预警数据,然后将火灾预警数据发送至各报警终端即可完成火灾报警。
[0006]
进一步的,所述的s1步骤中,各检测点之间间距为0.5—5米,且检测点与理论火源点间间距不小于1米。
[0007]
进一步的,所述的s3步骤中,在对得到的亮度变化率、火焰分布范围、环境温度变化率、空气质量变化率、pm2.5变化速率及空气成分变化率汇总运算时,设定火灾预警优先级,其中:第一优先级:火焰分布范围;第二优先级:空气质量变化率、空气成分变化率;第三优先级:环境温度变化率;第四优先级:pm2.5变化速率、亮度变化率。
[0008]
进一步的,所述的s3步骤中,第一优先级和第二优先级事件单独发生时即可进行火灾报警;第三优先级和第四优先级事件单独发生时则进行火灾预警,第三优先级和第四优先级事件同时发生时则进行火灾报警,第三优先级和第四优先级事件与第一优先级和第二优先级事件同步发生时则进行火灾报警。
[0009]
进一步的,所述的报警终端为蜂鸣器、报警器、工业计算机、pc计算机及移动通讯终端中的任意一种或几种共用。
[0010]
进一步的,所述的烟雾火焰识别终端包括承载座、驱动导轨、ccd摄像头、3d摄像头、测距装置、滑块、三维位移台、温度传感器、烟雾传感器、空气质量传感器、pm2.5传感器、亮度传感器、引流风机及驱动电路,其中所述承载座为横断面呈矩形空心柱状腔体结构,其左右两端端面均设与承载座同轴分布的引流风机,所述温度传感器、烟雾传感器、空气质量传感器、pm2.5传感器分别嵌于承载座左端面及右端面,所述驱动导轨至少一条,嵌于承载座前端面并与承载座轴线平行分布,所述滑块至少一个,其后端面与驱动导轨滑动连接,前端面通过三维位移台分别与一个ccd摄像头和两个3d摄像头铰接,其中所述3d摄像头对称分布在ccd摄像头两侧,且ccd摄像头和3d摄像头光轴相交,焦点位于ccd摄像头光轴上,并位于ccd摄像头前方至少0.1—3.5米范围内,所述测距装置和亮度传感器均与滑块侧表面连接,其中测距装置轴线与ccd摄像头光轴平行分布,所述驱动电路嵌于承载座内,并分别与驱动导轨、ccd摄像头、3d摄像头、测距装置、三维位移台、温度传感器、烟雾传感器、空气质量传感器、pm2.5传感器、亮度传感器、引流风机电气连接。
[0011]
进一步的,所述的驱动电路为基于fpga、dsp芯片中任意一种为基础的电路系统,所述驱动电路另设多路稳压电源、无线数据通讯模块及在线通讯模块。
[0012]
本发明系统构成结构简单,使用灵活方便,通用性好,一方面可有效满足各类场地火灾监控报警作业的需要,系统组网、维护便捷,从而极大的提高了本发明的通用性和灵活性;另一方面可有效的提高火灾检测作业的精度,有效防止火灾漏报、误报情况发生,从而达到提高火灾报警的精度、及时性和准确性。
附图说明
[0013]
下面结合附图和具体实施方式来详细说明本发明。
[0014]
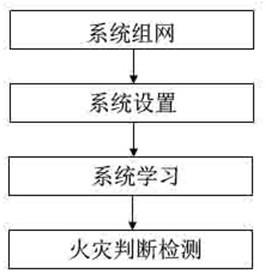
图1为本发明火灾报警方法流程图;图2为烟雾火焰识别终端。
[0015]
图中各标号:承载座1、驱动导轨2、ccd摄像头3、3d摄像头4、测距装置5、滑块6、三维位移台7、温度传感器8、烟雾传感器9、空气质量传感器10、pm2.5传感器11、亮度传感器12、引流风机13、驱动电路14。
具体实施方式
[0016]
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
[0017]
如图1所示,一种用于识别烟雾火焰的报警方法,包括如下步骤:s1,系统组网,首先构建一个报警服务器,并根据管理工作设置若干报警终端,和根据待监测空间结构,在待监测空间范围内设置若干检测点和若干理论火源点,且每个理论火源点正上方均设一个检测点,然后为各监测点处设置一个烟雾火焰识别终端,且各烟雾火焰识别终端轴线与水平面呈0
°
—90
°
夹角,最后将各检测点的烟雾火焰识别终端及报警终端通过通讯网络与报警服务器建立数据连接;s2,系统设置,完成s1步骤后,首先由报警服务器分别为各烟雾火焰识别终端及报警终端分配独立的通讯地址和硬件识别编码,然后在报警服务器中录入,相应的基于lstm的智能预测系统、深度学习神经网络系统及基于二值化运算的连通域图像识别子系统,完成系统设置;s3,系统学习,完成s2步骤后,报警服务器首先通过各烟雾火焰识别终端持续对待检测范围环境参数进行检测,并将检测后的数据通过基于lstm的智能预测系统、深度学习神经网络系统进行统计运算,获得待检测范围亮度变化率、火焰分布范围、环境温度变化率、空气质量变化率、pm2.5变化速率及空气成分变化率,并将得到的亮度变化率、火焰分布范围、环境温度变化率、空气质量变化率、pm2.5变化速率及空气成分变化率汇总运算,得到火灾判断基准;s4,火灾判断检测,在完成s3步骤作业后,即可由烟雾火焰识别终端对待检测范围中的烟雾变化及火焰变化进行检测,并将检测到的火焰和烟雾变化数据发送至报警服务器,然后由报警服务器对接收的数据与s3步骤获得的火灾判断基准进行比对,即可得到火灾预警数据,然后将火灾预警数据发送至各报警终端即可完成火灾报警。
[0018]
其中,所述的s1步骤中,各检测点之间间距为0.5—5米,且检测点与理论火源点间间距不小于1米。
[0019]
重点说明的,所述的s3步骤中,在对得到的亮度变化率、火焰分布范围、环境温度变化率、空气质量变化率、pm2.5变化速率及空气成分变化率汇总运算时,设定火灾预警优先级,其中:第一优先级:火焰分布范围;第二优先级:空气质量变化率、空气成分变化率;第三优先级:环境温度变化率;
第四优先级:pm2.5变化速率、亮度变化率。
[0020]
此外,所述的s3步骤中,第一优先级和第二优先级事件单独发生时即可进行火灾报警;第三优先级和第四优先级事件单独发生时则进行火灾预警,第三优先级和第四优先级事件同时发生时则进行火灾报警,第三优先级和第四优先级事件与第一优先级和第二优先级事件同步发生时则进行火灾报警。
[0021]
本实施例中,所述的报警终端为蜂鸣器、报警器、工业计算机、pc计算机及移动通讯终端中的任意一种或几种共用。
[0022]
值得注意的,如图2所示,烟雾火焰识别终端包括承载座1、驱动导轨2、ccd摄像头3、3d摄像头4、测距装置5、滑块6、三维位移台7、温度传感器8、烟雾传感器9、空气质量传感器10、pm2.5传感器11、亮度传感器12、引流风机13及驱动电路14,其中所述承载座1为横断面呈矩形空心柱状腔体结构,其左右两端端面均设与承载座1同轴分布的引流风机13,所述温度传感器8、烟雾传感器9、空气质量传感器10、pm2.5传感器11分别嵌于承载座1左端面及右端面,所述驱动导轨2至少一条,嵌于承载座1前端面并与承载座1轴线平行分布,所述滑块6至少一个,其后端面与驱动导轨2滑动连接,前端面通过三维位移台7分别与一个ccd摄像头3和两个3d摄像头4铰接,其中所述3d摄像头4对称分布在ccd摄像头3两侧,且ccd摄像头3和3d摄像头4光轴相交,焦点位于ccd摄像头3光轴上,并位于ccd摄像头3前方至少0.1—3.5米范围内,所述测距装置5和亮度传感器12均与滑块6侧表面连接,其中测距装置5轴线与ccd摄像头3光轴平行分布,所述驱动电路14嵌于承载座1内,并分别与驱动导轨2、ccd摄像头3、3d摄像头4、测距装置5、三维位移台7、温度传感器8、烟雾传感器9、空气质量传感器10、pm2.5传感器11、亮度传感器12、引流风机13电气连接。
[0023]
进一步优化的,所述的驱动电路14为基于fpga、dsp芯片中任意一种为基础的电路系统,所述驱动电路14另设多路稳压电源、无线数据通讯模块及在线通讯模块。
[0024]
本发明系统构成结构简单,使用灵活方便,通用性好,一方面可有效满足各类场地火灾监控报警作业的需要,系统组网、维护便捷,从而极大的提高了本发明的通用性和灵活性;另一方面可有效的提高火灾检测作业的精度,有效防止火灾漏报、误报情况发生,从而达到提高火灾报警的精度、及时性和准确性。
[0025]
本行业的技术人员应该了解,本发明不受上述实施例的限制。上述实施例和说明书中描述的只是说明本发明的原理。在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进。这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1