一种无人值守智慧停车管理系统的制作方法
1.本发明涉及人工智能技术领域,特别涉及一种无人值守智慧停车管理系统。
背景技术:
2.目前,城市停车运营管理是当前我国各城市管理和城市交通管理所面临的突出问题之一。其中城市停车管理又分为道路停车管理 与 停车场库管理两大部分。
3.停车场的收费措施均是基于人工值守配合停车管理系统功能完成,管理系统也各不相同、水平参差不齐,需要大量收费管理员,增加了运营成本和难度,无法标准、高效统一管理。因此提出了无人值守智慧停车管理系统,以解决人工成本问题;现有的无人值守智慧停车管理系统,通过设置智能道闸,基于车辆识别模块、计费模块、道闸的控制模块及收费模块,实现替代人工收费。当车位紧张时,用户进入停车场后,当再次回来取出时,会发生有其他用户的车停在车位前侧,影响用户的取车,容易发生剐蹭事故。
技术实现要素:
4.本发明目的之一在于提供了一种无人值守智慧停车管理系统,在原有的自动停车收费的基础上,通过取车辅助模块,实现当其他用户将车辆停在用户的停车位前,进行取车指导,避免发生剐蹭事故。
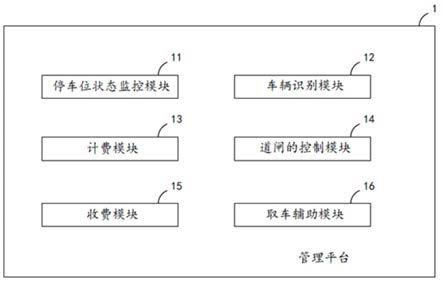
5.本发明实施例提供的一种无人值守智慧停车管理系统,包括:管理平台,所述管理平台包括:停车位状态监控模块、车辆识别模块、计费模块、道闸的控制模块及收费模块;还包括:取车辅助模块,用于接收停车的用户的取车辅助请求进行取车辅助操作;所述取车辅助模块执行如下操作:当接收到停车的用户的取车辅助请求后,确定目标车辆的目标停车位置;基于所述目标停车位置,确定多个取车辅助使用的第一图像采集装置以及取车辅助使用的提醒装置;在所述用户进行取车时,通过所述第一图像采集装置,获取所述目标车辆外周的环境的第一图像;将所述第一图像输入预设的第一神经网络模型,确定所述提醒装置的控制指令;基于所述控制指令控制所述提醒装置动作。
6.优选的,所述取车辅助模块在接收到所述取车辅助请求后,确定所述目标车辆的所述目标停车位置,执行如下操作:通过所述用户的移动终端的第一定位信息;基于所述第一定位信息和预先构建的拍摄目标位置与图像采集装置对应表,确定用于拍摄所述用户的第二图像采集装置;通过所述第二图像采集装置,拍摄包含所述用户的第二图像;
基于所述第二图像,构建所述用户的第一人物画像;将所述第一人物画像与事先建立的停车信息库中标准人物画像进行匹配,获取与所述第一人物画像相匹配的所述标准人物画像对应关联的停车位信息以及车辆信息;确定所述停车位信息对应的第二定位信息;基于所述第一定位信息和所述第二定位信息,判断所述用户的所述取车辅助请求是否有效;当所述取车辅助请求为有效时,将所述停车位信息对应的停车位置作为所述目标停车位置;当所述取车辅助请求为无效时,拒绝所述用户的所述取车辅助请求。
7.优选的,所述取车辅助模块基于所述第一定位信息和所述第二定位信息,判断所述用户的所述取车辅助请求是否有效,执行如下操作:构建虚拟地图;将所述第一定位信息和所述第二定位信息映射至所述虚拟地图中,获得第一位置和第二位置;确定所述第一位置和所述第二位置之间的第一距离;当所述第一距离小于预设的第一距离阈值时,确定所述用户的所述取车辅助请求为有效;当所述第一距离大于等于预设的第一距离阈值时,确定所述用户的所述取车辅助请求为无效。
8.优选的,所述停车信息库通过如下步骤构建:实时获取停车场内各个用户的进行停车的第三图像;解析所述第三图像,确定停车位信息、车辆信息以及从车辆上下来的各个人员的人员信息;基于各个人员的所述人员信息,构建各个人员对应的所述标准人物画像;将各个人员对应的所述标准人物画像、所述停车位信息和所述车辆信息进行关联,形成所述停车信息库中的一条停车信息。
9.优选的,所述取车辅助模块基于所述目标停车位置,确定多个取车辅助使用的第一图像采集装置以及取车辅助使用的提醒装置,执行如下操作:获取所述目标停车位置对应的所述停车位信息所对应的第二定位信息;获取设置在所述停车场内各个图像采集装置对应的拍摄目标位置集;将所述第二定位信息与所述拍摄目标位置集中各个拍摄目标位置对应关联的第三定位信息匹配,当所述拍摄目标位置集中存在匹配项,确定所述拍摄目标位置集对应的图像采集装置为所述第一图像采集装置;获取设置在所述停车场内各个所述提醒装置的设置位置对应的第四定位信息;基于所述第二定位信息和所述第四定位信息,确定各个所述提醒装置与所述目标停车位置之间的第二距离;当所述第二距离小于预设的第二距离阈值时,确定所述提醒装置为取车辅助使用的所述提醒装置。
10.优选的,所述取车辅助模块在所述用户进行取车时,通过所述第一图像采集装置,
获取所述目标车辆外周的环境的第一图像,执行如下操作:通过所述第一图像采集装置采集所述目标停车位置上车辆的驾驶室的第四图像;解析所述第四图像,确定是否存在驾驶人员;当存在驾驶人员时,通过所述第一图像采集装置获取所述目标停车位置周围预设范围内的第五图像;获取所述停车场对应的三维模型,截取所述目标停车位置周围预设范围,构建三维模拟空间;对所述第五图像进行识别,确定所述目标停车位置上的车辆的第一模型、周围车辆的第二模型以及周围障碍物的第三模型;将所述第一模型、所述第二模型和所述第三模型,映射至所述三维模拟空间;对映射后三维模型空间进行特征提取,提取多个第一特征值;将多个所述第一特征值输入预设的第二神经网络模型,确定用户取车时易剐蹭的位置;基于用户取车时易剐蹭的位置,确定所述第一图像采集装置的最佳拍摄角度并控制所述第一图像采集装置调整至所述最佳拍摄角度;将所述用户进行取车操作时,通过位于所述最佳拍摄角度的所述第一图像采集装置采集的图像作为所述第一图像。
11.优选的,所述取车辅助模块基于用户取车时易剐蹭的位置,确定所述第一图像采集装置的最佳拍摄角度,执行如下操作:将所述第一图像采集装置映射至所述三维模拟空间;基于所述用户取车时易剐蹭的位置,确定发生剐蹭时所述第一模型的位置;在所述三维模拟空间中,确定易剐蹭的位置的中心点以及边界点;基于所述中心点和各个所述边界点,确定多个第一方向向量;在所述三维模拟空间中,确定各个所述第一图像采集装置的设置的位置点;基于所述中心点和各个所述第一图像采集装置的设置的位置点,确定多个第二方向向量;分别计算各个所述第一方向向量与各个所述第二方向向量的夹角;依据所述夹角从小到大的顺序,依次提取对应的所述第二方向向量;依据依次提取的所述第二方向向量,在所述三维模拟空间中调整所述第一图像采集装置的位置及拍摄角度;当所述第一图像采集装置拍摄所述易剐蹭的位置时,拍摄路径上无遮挡时,确定此时所述第一图像采集装置的拍摄角度为最佳拍摄角度。
12.优选的,无人值守智慧停车管理系统,还包括:取车辅助机器人,与管理平台通讯连接,接收所述取车辅助模块的控制;当所述第二方向向量都提取完后,无法实现所述第一图像采集装置的拍摄路径上无遮挡时,所述取车辅助模块控制所述取车辅助机器人移动到所述目标停车位置进行辅助取车;其中,所述取车辅助机器人包括:壳体,底部设置有移动机构;导航模块,设置在所述壳体内;
第三图像采集装置,设置在所述壳体上端;扬声器,设置在所述壳体外周;处理器,设置在所述壳体内,分别与所述导航模块、所述移动机构、所述第三图像采集装置和所述扬声器电连接;无线通讯模块,设置在所述壳体内,与所述处理器电连接,用于与所述管理平台通讯连接。
13.优选的,所述取车辅助模块将所述第一图像输入预设的第一神经网络模型,确定所述提醒装置的控制指令,执行如下操作:对连续预设帧数的所述第一图像进行特征提取,提取多个第二特征值;将多个所述第二特征值输入至预设的第一神经网络模型,确定所述提醒装置的控制指令。
14.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
15.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
16.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明实施例中一种无人值守智慧停车管理系统的示意图;图2为本发明实施例中一种取车辅助模块的执行步骤图;图3为本发明实施例中一种取车辅助模块确定目标停车位置的执行步骤图。
具体实施方式
17.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
18.本发明实施例提供了一种无人值守智慧停车管理系统,如图1所示,包括:管理平台1,管理平台1包括:停车位状态监控模块11、车辆识别模块12、计费模块13、道闸的控制模块14及收费模块15;还包括:取车辅助模块16,用于接收停车的用户的取车辅助请求进行取车辅助操作;如图2所示,取车辅助模块16执行如下操作:步骤s1:当接收到停车的用户的取车辅助请求后,确定目标车辆的目标停车位置;步骤s2:基于目标停车位置,确定多个取车辅助使用的第一图像采集装置以及取车辅助使用的提醒装置;步骤s3:在用户进行取车时,通过第一图像采集装置,获取目标车辆外周的环境的第一图像;步骤s4:将第一图像输入预设的第一神经网络模型,确定提醒装置的控制指令;步骤s5:基于控制指令控制提醒装置动作。
19.上述技术方案的工作原理及有益效果为:
停车位状态监控模块11,主要包括地磁传感器、高位视频设备等监测停车位是否停车以及停车位上的车辆的车辆信息;车辆识别模块12,主要用于对高位视频设备等拍摄的图像进行识别,识别车辆号牌等;计费模块13,用于当车辆停在停车位后对停车费用进行计算;道闸的控制模块14,用于控制停车场出入口的道闸的起落;收费模块15,用于链接至第三方支付平台,以便用户的停车费用的支付;通过管理平台1,实现对道闸的自动控制,以及用户自动收费,实现了无人值守管理;通过移动巡检车的移动视频以及固定高位视频视频停车取证,同时结合支付宝、微信电子支付、etc支付;音视频远程通讯等技术构成一套完整的、低成本的停车运营方法。取车辅助模块16的使用主要是针对用户在将停车位上的车辆开出时,前方有障碍物或者不自信的司机使用;通过取车辅助模块16辅助用户取车,避免意外剐蹭事件的发生;取车辅助模块16主要通过第一图像采集装置确定用户取车现场情况,根据第一神经网络模型对第一图像进行识别,确定出辅助用的提醒装置的控制指令并控制提醒装置动作,提醒装置主要包括:音频播放设备,如扬声器等,播放提示语音;提示语音包括:方向盘向右打满,挂倒车档,倒车;请继续倒车;停;方向盘向左打满,挂行车档,走等,以车辆外部的视频观测为基准进行智能识别,进而输出提醒语音,辅助用户进行取车,以实现在停车位前停了一辆车辆后的,但还留有可以将车开出的余地时用户取车操作,避免发生剐蹭事故。
20.在一个实施例中,如图3所示,取车辅助模块16在接收到取车辅助请求后,确定目标车辆的目标停车位置,执行如下操作:步骤s11:通过用户的移动终端的第一定位信息;步骤s12:基于第一定位信息和预先构建的拍摄目标位置与图像采集装置对应表,确定用于拍摄用户的第二图像采集装置;拍摄目标位置与图像采集装置对应表,是根据图像采集装置在停车场内的设置位置及图像采集装置的拍摄方向事先建立的;步骤s13:通过第二图像采集装置,拍摄包含用户的第二图像;步骤s14:基于第二图像,构建用户的第一人物画像;第一人物画像包括:衣着特征、性别特征、面部特征等;步骤s15:将第一人物画像与事先建立的停车信息库中标准人物画像进行匹配,获取与第一人物画像相匹配的标准人物画像对应关联的停车位信息以及车辆信息;步骤s16:确定停车位信息对应的第二定位信息;步骤s17:基于第一定位信息和第二定位信息,判断用户的取车辅助请求是否有效;步骤s18:当取车辅助请求为有效时,将停车位信息对应的停车位置作为目标停车位置;步骤s19:当取车辅助请求为无效时,拒绝用户的取车辅助请求。
21.其中,取车辅助模块16基于第一定位信息和第二定位信息,判断用户的取车辅助请求是否有效,执行如下操作:构建虚拟地图;可以依据停车场的三维模型进行虚拟地图的构建;将第一定位信息和第二定位信息映射至虚拟地图中,获得第一位置和第二位置;确定第一位置和第二位置之间的第一距离;当第一距离小于预设的第一距离阈值(例如:5米)时,确定用户的取车辅助请求为
有效;当第一距离大于等于预设的第一距离阈值时,确定用户的取车辅助请求为无效。通过对请求的有效无效判断,以确定用户是否切实需要进行辅助取车。
22.其中,停车信息库通过如下步骤构建:实时获取停车场内各个用户的进行停车的第三图像;解析第三图像,确定停车位信息、车辆信息以及从车辆上下来的各个人员的人员信息;停车位信息包括:停车位在停车场的三维模型中的位置、停车位编号等;车辆信息包括:车辆型号、厂家、车牌号等;人员信息包括:衣着特征、性别、面部特征对应的第三图像的区域;基于各个人员的人员信息,构建各个人员对应的标准人物画像;标准人物画像包括:衣着特征、性别特征、面部特征等;将各个人员对应的标准人物画像、停车位信息和车辆信息进行关联,形成停车信息库中的一条停车信息。
23.通过根据停车场内停车时的第三图像构建出进行取车辅助操作的停车信息库,以便于确定目标停车位置。
24.在一个实施例中,取车辅助模块16基于目标停车位置,确定多个取车辅助使用的第一图像采集装置以及取车辅助使用的提醒装置,执行如下操作:获取目标停车位置对应的停车位信息所对应的第二定位信息;获取设置在停车场内各个图像采集装置对应的拍摄目标位置集;将第二定位信息与拍摄目标位置集中各个拍摄目标位置对应关联的第三定位信息匹配,当拍摄目标位置集中存在匹配项,确定拍摄目标位置集对应的图像采集装置为第一图像采集装置;获取设置在停车场内各个提醒装置的设置位置对应的第四定位信息;基于第二定位信息和第四定位信息,确定各个提醒装置与目标停车位置之间的第二距离;当第二距离小于预设的第二距离阈值(例如4米)时,确定提醒装置为取车辅助使用的提醒装置。通过选取合适的提醒装置,保证用户能够接收到提醒。
25.在一个实施例中,取车辅助模块16在用户进行取车时,通过第一图像采集装置,获取目标车辆外周的环境的第一图像,执行如下操作:通过第一图像采集装置采集目标停车位置上车辆的驾驶室的第四图像;解析第四图像,确定是否存在驾驶人员;当存在驾驶人员时,通过第一图像采集装置获取目标停车位置周围预设范围内的第五图像;获取停车场对应的三维模型,截取目标停车位置周围预设范围(例如:方圆5米),构建三维模拟空间;对第五图像进行识别,确定目标停车位置上的车辆的第一模型、周围车辆的第二模型以及周围障碍物的第三模型;将第一模型、第二模型和第三模型,映射至三维模拟空间;对映射后三维模型空间进行特征提取,提取多个第一特征值;
将多个第一特征值输入预设的第二神经网络模型,确定用户取车时易剐蹭的位置;基于用户取车时易剐蹭的位置,确定第一图像采集装置的最佳拍摄角度并控制第一图像采集装置调整至最佳拍摄角度;将用户进行取车操作时,通过位于最佳拍摄角度的第一图像采集装置采集的图像作为第一图像。
26.其中,取车辅助模块16基于用户取车时易剐蹭的位置,确定第一图像采集装置的最佳拍摄角度,执行如下操作:将第一图像采集装置映射至三维模拟空间;基于用户取车时易剐蹭的位置,确定发生剐蹭时第一模型的位置;在三维模拟空间中,确定易剐蹭的位置的中心点以及边界点;易剐蹭的位置为发生剐蹭时第一模型上的位置;基于中心点和各个边界点,确定多个第一方向向量;第一方向向量为中心点指向边界点;在三维模拟空间中,确定各个第一图像采集装置的设置的位置点;针对固定的第一图像采集装置,位置点为一个点位;当可以左右或前后移动的第一图像采集装置,位置点为多个点位;基于中心点和各个第一图像采集装置的设置的位置点,确定多个第二方向向量;第二方向向量为中心点指向位置点;分别计算各个第一方向向量与各个第二方向向量的夹角;可以采用余弦夹角计算公式进行计算;依据夹角从小到大的顺序,依次提取对应的第二方向向量;依据依次提取的第二方向向量,在三维模拟空间中调整第一图像采集装置的位置及拍摄角度;当第一图像采集装置拍摄易剐蹭的位置时,拍摄路径上无遮挡时,确定此时第一图像采集装置的拍摄角度为最佳拍摄角度。保证第一图像采集装置拍摄无阻挡。
27.在一个实施例中,无人值守智慧停车管理系统,还包括:取车辅助机器人,与管理平台1通讯连接,接收取车辅助模块16的控制;当第二方向向量都提取完后,无法实现第一图像采集装置的拍摄路径上无遮挡时,取车辅助模块16控制取车辅助机器人移动到目标停车位置进行辅助取车;其中,取车辅助机器人包括:壳体,底部设置有移动机构;导航模块,设置在壳体内;第三图像采集装置,设置在壳体上端;扬声器,设置在壳体外周;处理器,设置在壳体内,分别与导航模块、移动机构、第三图像采集装置和扬声器电连接;无线通讯模块,设置在壳体内,与处理器电连接,用于与管理平台1通讯连接。
28.上述技术方案的工作原理及有益效果为:因设置的第一图像采集装置无法满足辅助取车的图像拍摄的需求,因此调控取车
辅助机器人进行现场取车辅助,综合停车场设置的图像采集装置以及取车辅助机器人实现应对任意情形的用户的辅助取车请求。取车辅助机器人通过无线通讯模块接收管理平台1的控制指令;通过导航模块实现路线导航运行;通过移动机构实现在停车场内的移动;通过第三图像采集装置,对用户取车过程中的车辆外的环境进行拍摄,将拍摄的画面传输到管理平台1,经由取车辅助模块16确定提醒信息,通过扬声器进行播放,实现了当其他用户将车辆停在用户的停车位前,进行取车指导,避免发生剐蹭事故。
29.在一个实施例中,取车辅助模块16将第一图像输入预设的第一神经网络模型,确定提醒装置的控制指令,执行如下操作:对连续预设帧数的第一图像进行特征提取,提取多个第二特征值;第二特征值包括:汽车速度、与障碍物的距离、车辆的运动方向向量、汽车边界、障碍物边界等;将多个第二特征值输入至预设的第一神经网络模型,确定提醒装置的控制指令。第一神经网络模型是基于大量的数据进行训练收敛的,针对行车进行指导的人工智能网络模型。
30.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1