一种超大型船舶通航安全预测方法及系统与流程
1.本发明涉及航海安全保障领域,特别是涉及一种超大型船舶通航安全预测方法及系统。
背景技术:
2.随着全球经济一体化的快速发展,海上运输量不断增大,为降低运输成本,船舶日趋大型化。大型船舶代表着更先进的技术和更友好的环境保护,全球对低碳经济发展的需求,无疑是船舶大型化的直接推动力。超大型船舶由于其迅猛的发展势头和尺度、操纵性能方面的特殊性,越来越受到学者的重视,同时其应用前景也受到业内广泛关注。
3.现状下由于近海水域通航条件的限制,使得超大型船舶无法直接达到港区,例如进港的超大型船舶需转港减载后方能驶入,既大幅减少货物载重量,又增加运输成本,对船舶行业的发展带来不利影响。通航环境的受限不利于港口大型化、集成化发展战略的落地实施。因此,开展以40万吨级船舶为代表的大吃水超大型船舶安全进出港及靠离泊的研究工作,对推动船舶大型化、提高港口货物运转量具有十分重要的意义,同时为解决同类碍航问题提供解决思路和方法,具有科学意义。
4.由于超大型船舶动量、惯性大,空载时受风面积大,在航行和靠离泊过程中,相对于普通船舶而言,操纵难度和航行风险均较高。沿海水域通航条件复杂,船舶流量大,碰撞、搁浅等事故频发,一旦超大型船舶发生事故,对港口水域的通航环境、生态环境乃至局部区域的经济发展带来较为恶劣的影响。因此,对超大型散货船等不同船型从进港到靠离泊全过程进行风险的综合评价,特别是对船舶适航时段进行预报具有重要的工程价值。
技术实现要素:
5.本发明的目的是提供一种超大型船舶通航安全预测方法及系统,能够准确确定船舶进港时间段,保障船舶的通航安全。
6.为实现上述目的,本发明提供了如下方案:
7.第一方面,本发明提供的一种超大型船舶通航安全预测方法,包括:
8.获取目标水域通航数据;所述目标水域通航数据包括目标水域地形数据、风级、能见度、冰况以及计划航线;
9.预测目标水域计划航线的潮位值、横流流速和纵流流速;
10.基于所述目标水域地形数据和所述潮位值,预测目标水域计划航线的航深;
11.将所述目标水域通航数据、所述横流流速、所述纵流流速和所述航深分别与对应的危险度指标进行比较,确定超大型船舶在所述目标水域通航时的危险等级;
12.根据所述危险等级,对所述超大型船舶的进港时间段进行预测。
13.可选地,所述获取目标水域通航数据,具体包括:
14.收集目标水域历史通航数据;
15.基于所述目标水域历史通航数据和计划航线水域数据模型实验确定影响超大型
船舶安全通航的通航条件;
16.基于所述通航条件获取目标水域通航数据。
17.可选地,所述通航条件包括:地形条件、水文条件、计划航线、交通流特征和气象特征;
18.所述地形条件包括:目标水域海底地形;所述水文条件包括:流向、流速、潮位和潮汐调和常数;所述计划航线包括多个目标点的航行信息;所述航行信息包括经纬度坐标、转向点和转向角度;所述目标点为所述计划航线中的任一一点;所述交通流特征包括船舶密度、船舶尺度、船舶速度和船舶种类;所述气象特征包括风级、冰况和能见度。
19.可选地,所述预测目标水域计划航线的潮位值、横流流速和纵流流速,具体包括:
20.对目标水域进行网格划分;
21.在网格划分后的目标水域中的计划航线上设置水流条件监测点;
22.在所述网格划分后的目标水域中的计划航线上,确定水深小于设定阈值的航线线段;所述航线线段内包括多个水深小于设定阈值的位置点;
23.在所述航线线段的两端设置水深条件监测点;
24.根据所述水流条件监测点和所述水深条件监测点建立水位、水流预报模型;
25.基于所述水位、水流预报模型,实时预测目标水域内的潮位值、横流流速和纵流流速。
26.可选地,所述危险度指标包括:航深危险度评价指标、能见度危险度评价指标、风危险度评价指标、纵向流速危险度评价指标、横向流速危险度评价指标和冰况危险度评价指标。
27.可选地,所述危险等级包括按照优先等级排列的高危险、较高危险、一般危险和较低危险。
28.第二方面,本发明提供的一种超大型船舶通航安全预测系统,包括:
29.通航数据获取模块,用于获取目标水域通航数据;所述目标水域通航数据包括目标水域地形数据、风级、能见度、冰况以及计划航线;
30.流场数据预测模块,用于预测目标水域计划航线的潮位值、横流流速和纵流流速;
31.航深数据预测模块,用于基于所述目标水域地形数据和所述潮位值,预测目标水域计划航线的航深;
32.安全评价模块,用于将所述目标水域通航数据、所述横流流速、所述纵流流速和所述航深分别与对应的危险度指标进行比较,确定超大型船舶在所述目标水域通航时的危险等级;
33.航行建议模块,用于根据所述危险等级,对所述超大型船舶的进港时间段进行预测。
34.可选地,所述通航数据获取模块包括:
35.历史通航数据获取单元,用于收集目标水域历史通航数据;
36.通航条件确定单元,用于基于所述目标水域历史通航数据和计划航线水域数据模型实验确定影响超大型船舶安全通航的通航条件;
37.目标水域通航数据获取单元,用于基于所述通航条件获取目标水域通航数据。
38.可选地,所述流场数据预测模块包括:
39.网络划分单元,用于对目标水域进行网格划分;
40.水流条件监测点设置单元,用于在网格划分后的目标水域中的计划航线上设置水流条件监测点;
41.水深条件监测点设置单元,用于在所述网格划分后的目标水域中的计划航线上,确定水深小于设定阈值的航线线段;所述航线线段内包括多个水深小于设定阈值的位置点;并在所述航线线段的两端设置水深条件监测点;
42.水位、水流预报模型构建单元,用于根据所述水流条件监测点和所述水深条件监测点建立水位、水流预报模型;
43.潮位流速预测单元,用于基于所述水位、水流预报模型,实时预测目标水域内的潮位值、横流流速和纵流流速。
44.根据本发明提供的具体实施例,本发明公开了以下技术效果:
45.本发明根据目标水域通航数据实时预测目标水域计划航线的潮位值、横流流速、纵流流速和船舶航深,在综合考虑航深、横向流速、纵向流速等通航数据基础上,采用危险度指标进行危险度评价,能够准确确定从进港到靠离泊全过程的风险预测,特别是对船舶适航时段进行预报,保障船舶的通航安全。
附图说明
46.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
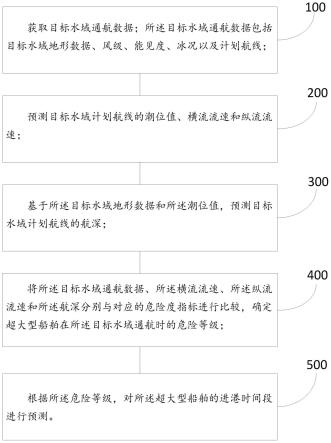
47.图1为本发明实施例超大型船舶通航安全预测方法流程图;
48.图2为本发明实施例目标水域网格划分图;
49.图3为本发明实施例潮位过程图;
50.图4为本发明实施例风险预测图;
51.图5为本发明实施例风险动态评估图;
52.图6为本发明实施例超大型船舶通航安全预测系统结构图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.本发明的目的是提供一种超大型船舶通航安全预测方法及系统,能够准确确定船舶进港时间段,保障船舶的通航安全。
55.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
56.实施例一
57.如图1所示,本发明实施例提供的一种超大型船舶通航安全预测方法,包括:
58.步骤100:获取目标水域通航数据;所述目标水域通航数据包括目标水域地形数据、风级、能见度、冰况以及计划航线。
59.所述步骤100具体为:
60.步骤101:收集目标水域历史通航数据;
61.步骤102:基于所述目标水域历史通航数据和计划航线水域数据模型实验确定影响超大型船舶安全通航的通航条件。
62.具体地,进行计划航线水域数学模型实验,基于计划航线水域数学模型实验确立影响通航水域安全的关键性因素,即影响超大型船舶安全通航的通航条件。
63.影响超大型船舶通航安全的通航条件包括:
64.地形条件:目标水域海底地形。
65.水文条件:流向、流速、潮位、调和常数等。
66.计划航线:代表点经纬度坐标、转向点、转向角度。
67.交通流特征:船舶密度、船舶尺度、船舶速度、船舶种类等。
68.气象特征:风、雨、冰况、能见度等。
69.步骤103:基于所述通航条件获取目标水域通航数据。
70.具体地,基于所述通航条件,获取目标水域地形数据、交通流数据、风级、能见度、冰况以及计划航线;
71.其中,收集目标水域地形数据,基于公共系统网络系统收集航道风级、能见度及冰况等数据,收集到未来6小时、12小时、24小时、48小时和72小时的风级、能见度及冰况数据。
72.步骤200:预测目标水域计划航线的潮位值、横流流速和纵流流速。
73.所述步骤200具体为:
74.步骤201:对目标水域进行网格划分。
75.本发明以渤海中部水域为例,对航线水域进行网格划分,如图2所示,对研究水域进行网格划分。
76.步骤202:在网格划分后的目标水域中的计划航线上设置水流条件监测点。
77.进一步地,在计划航线上每隔1海里设置一个水流条件监测点。
78.步骤203:在所述网格划分后的目标水域中的计划航线上,确定水深小于设定阈值的航线线段;所述航线线段内包括多个水深小于设定阈值的位置点。
79.步骤204:在所述航线线段的两端设置水深条件监测点。
80.其中,设定的水深阈值为一个较低的值,其目的是为了确定水深不足的航线线段,其水深不足的航线线段内包含多个水深浅点。
81.然后在网格划分后的目标水域中的计划航线上水深不足的两端设置水深条件监测点,如图4所示。
82.步骤205:根据所述水流条件监测点和所述水深条件监测点建立水位、水流预报模型:
[0083][0084]
其中,a
x
、ay、b
x
、by、d
x
、dy、τ
bx
和τ
by
的表达式分别如式(2)-(10)所示:
[0085][0086][0087][0088][0089][0090][0091]
τ
bx
=uτ
*
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0092]
τ
by
=vτ
*
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0093][0094]
其中,t为时间、x为x轴方向坐标、y为y轴方向坐标、z为z轴方向坐标、τ0为随空间变化的权重系数、ζ为从平均海平面起算的潮位高度、u为x方向垂向平均流速、v为y方向垂向平均流速、h为从平均海平面起算的水深、s为系数(这里取1)、h为表示ζ和h之和的总水深、f为科氏力系数、ps为表面大气压、ρ为水的密度、ρ0为水的参考密度、为水的垂向平均密度、g为重力加速度、η为牛顿潮势作用、γ为固体潮作用、τ
sx
为表面风应力和波浪辐射应力的x向分量、τ
sy
为表面风应力和波浪辐射应力的y向分量、τ
bx
为底部切应力的x向分量、τ
by
为底部切应力y向分量、cf为底摩擦系数、τ
*
为底摩擦计算参数、a
x
为x方向组合项的代表变量、ay为y方向组合项的代表变量、dy为扩散项的y向分量、d
x
为扩散项的x向分量、dy为扩散项的y向分量、eh为水平涡粘系数、b
x
为斜压梯度项的x向分量,by为斜压梯度项的y向分量。
[0095]
开边界水位由边界的潮汐调和常数进行插值得到,初始条件为ζ=u=v=0。
[0096]
步骤205:基于所述水位、水流预报模型,预报和实时监控水域内水流数据并进行统计,预测未来6小时、12小时、24小时、48小时和72小时水域内的潮位和流场变化,给出具体潮位值、横流流速和纵流流速。
[0097]
步骤300:基于所述目标水域地形数据和所述潮位值,预测目标水域计划航线的航深。
[0098]
如图4所示,根据船舶吃水和计划航线的水深,航线水深不足的两端设置水深条件监测点,对每个潮过程,计算从起始的潮位站e的潮谷时刻开始,截止时间是船舶航行至最末的潮位站f时恰为潮谷的时刻,计算的某个潮过程如图3所示,浅区起始点对应的线为e点潮过程,浅区终止点对应的线为f点潮过程。以设定航速(如10knot)、按合适的时间间隔(如1hr)放行船舶,根据步骤200的结果,可以得到每个潮过程、每个航行过程中船舶到达不同位置的潮高,结合收集到的目标水域地形数据,可以得到每个潮过程、每个航行过程中的最小富裕深度值,所述最小富裕深度值为最小水深与吃水值的比值,在一个潮过程、多个航行过程中选取最小富裕深度的最大值对应的进港时刻,即为最安全的进港时刻。或者,在富裕深度值已经确定的条件下,也是可以进港最大通航吃水的时刻。
[0099]
其中,目标水域地形数据和船舶行驶到f点位置时刻的潮高为水深。
[0100]
步骤400:将所述目标水域通航数据、所述横流流速、所述纵流流速和所述航深分别与对应的危险度指标进行比较,确定超大型船舶在所述目标水域通航时的危险等级。
[0101]
其中,根据《海港总体设计规范》等相关标准规范和相关研究确定水深、纵向流速及横向流速等指标值,通过与阈值进行比较,判断指标是否处于何种安全范围。
[0102]
所述危险等级包括按照优先等级排列的高危险、较高危险、一般危险和较低危险。
[0103]
1)航深
[0104]
采用水深与船舶吃水比值作为航深的评价指标,航深的危险度评价标准如表1所示:
[0105]
表1航深危险度评价标准表
[0106][0107]
2)能见度
[0108]
能见距离小于4km时,对船舶航行有一定的影响;能见距离降至1km时,船舶事故数量会急剧增大。一般选择能见距离在2km以内的能见度不良的天数作为标准。采用由于能见度不良小于2km能见距离的天数作为标准,能见度危险度评价标准如表2所示:
[0109]
表2能见度危险度评价标准表
[0110][0111]
3)风
[0112]
在通航安全评价体系中,风的影响也较为突出。船舶在航行时,容易发生风致船舶漂移,也会发生风致航向偏离,以及船舶操纵能力的下降。风级不同对船舶造成的影响程度不同,风越大,造成事故的几率越大。风危险度评价标准如表3所示。
[0113]
表3风级危险度评价标准表
[0114][0115]
4)纵向流速
[0116]
纵向流速很大时,船舶上行及下行都会面临一定的问题,纵向流速的分级范围分别为小于1、1~2、2~3、3~4、大于4共5级,因此纵向流速的危险性评价标准如表4所示:
[0117]
表4纵向流速危险度评价标准
[0118][0119]
5)横向流速
[0120]
根据《海港总体设计规范》,横流的分级范围分别为小于0.1、0.1~0.25、0.25~0.75、0.75~1.0共5级,因此横向流速的危险性评价标准如表5所示:
[0121]
表5横流流速危险度评价标准
[0122][0123]
6)冰况
[0124]
冰况的危险度评价标准如表6所示:
[0125]
表6冰况危险度评价标准表
[0126][0127]
步骤500:根据所述危险等级,对所述超大型船舶的进港时间段进行预测。
[0128]
采用app等多种信息化手段将步骤300中收集到的危险性等级评价结果数据有序的分发给主管机关和船舶,同时给出进港时间建议,如图4-图5所示。
[0129]
当预报48小时内达到较高危险以上等级时,向船舶和主管机关进行报警,尽早采取避让措施。
[0130]
当预报24小时内达到一般危险以上等级时,向船舶和主管机关进行报警,尽早采取避让措施。
[0131]
当预报12小时内接近达到较低危险以上时,向船舶进行预警,提示可能出现的危险局面。
[0132]
当通航条件在低危险级别时,不进行预警。
[0133]
如图6所示,本发明实施例提供的一种超大型船舶通航安全预测系统,包括:
[0134]
通航数据获取模块601,用于获取目标水域通航数据;所述目标水域通航数据包括
目标水域地形数据、风级、能见度、冰况以及计划航线。
[0135]
流场数据预测模块602,用于预测目标水域计划航线的潮位值、横流流速和纵流流速。
[0136]
航深数据预测模块603,用于基于所述目标水域地形数据和所述潮位值,预测目标水域计划航线的航深。
[0137]
安全评价模块604,用于将所述目标水域通航数据、所述横流流速、所述纵流流速和所述航深分别与对应的危险度指标进行比较,确定超大型船舶在所述目标水域通航时的危险等级。
[0138]
航行建议模块605,用于根据所述危险等级,对所述超大型船舶的进港时间段进行预测。
[0139]
进一步地,所述通航数据获取模块包括:
[0140]
历史通航数据获取单元,用于收集目标水域历史通航数据。
[0141]
通航条件确定单元,用于基于所述目标水域历史通航数据和计划航线水域数据模型实验确定影响超大型船舶安全通航的通航条件。
[0142]
目标水域通航数据获取单元,用于基于所述通航条件获取目标水域通航数据。
[0143]
进一步地,所述流场数据预测模块包括:
[0144]
网络划分单元,用于对目标水域进行网格划分;
[0145]
水流条件监测点设置单元,用于在网格划分后的目标水域中的计划航线上设置水流条件监测点;
[0146]
水深条件监测点设置单元,用于在所述网格划分后的目标水域中的计划航线上,确定水深小于设定阈值的航线线段;所述航线线段内包括多个水深小于设定阈值的位置点;并在所述航线线段的两端设置水深条件监测点;
[0147]
水位、水流预报模型构建单元,用于根据所述水流条件监测点和所述水深条件监测点建立水位、水流预报模型;
[0148]
潮位流速预测单元,用于基于所述水位、水流预报模型,实时预测目标水域内的潮位值、横流流速和纵流流速。
[0149]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0150]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1