一种公交车遮挡交通信号灯获取方法与流程
1.本发明属于车辆技术领域,特别是涉及一种基于车机系统的公交车遮挡交通灯解决方法。
背景技术:
2.目前,一些大型车辆(如公交车等)行驶在道路中时,由于车身过高,对其正后方行驶的小型车辆会造成视线遮挡而导致后车看不到交通信号灯的情况。这一现象严重威胁了后方行驶的小型车辆的道路行车安全。
3.申请号为201810789400.3的发明公开一种用于大型车辆的交通灯识别与预警装置,包括摄像头、led显示屏、扬声器、超声波车距探头和主机,其特征是:摄像头安装在大型车辆顶部中央,led显示屏、扬声器和超声波车距探头安装在大型车辆尾部,主机安装在驾驶员座位附近,摄像头、led显示屏、扬声器、超声波车距探头均通过线缆与主机电连接。该方法能够识别车辆前方交通灯状态并向后方传播,以帮助后方车辆的车主实时地了解前方交通灯状态。
4.另外,申请号为201910866296.8的发明公开一种显示交通信号灯的方法和装置,该方法应用于车辆,该车辆后方具有显示模块,该方法可以包括:获取车辆前方的交通信号灯的状态信息;在车辆后方的显示模块上显示所述状态信息,以便该车辆后方的交通参与者可以通过该显示模块获知交通信号灯的状态信息。
5.上述方法均通过预设距离对后方车辆进行信号灯提醒,即通过预先设置一个常数值,然后依据该距离来判断是否存在遮挡情况(比如:两车之间的距离小于预设值则判断为遮挡)。实际上,道路坡度实时变化、不同交通灯高度变化、两车的车高变化、两车的车速实时变化、两车之间的距离实时变化都会影响预设值,现有技术中将预设值定义为一个常数势必影响检测精度。
技术实现要素:
6.本发明提出一种交通信号灯的获取方法,可以实现交通灯、前方公交车、后方小车在运动状态下实时检测并准确判断后方车辆是否存在视线遮挡,从而将交通灯信息及时传输至后方车辆。其方案为:
7.步骤a、通过前置摄像头获取图像,并进行交通灯识别;
8.步骤b、实时获取公交车后方的遮挡区域
9.b1、获取前置摄像头安装位置和倒车雷达位置的高度差h1、公交车顶到倒车雷达位置的高度差h2、前置摄像头安装位置和倒车雷达位置的水平距离s0;
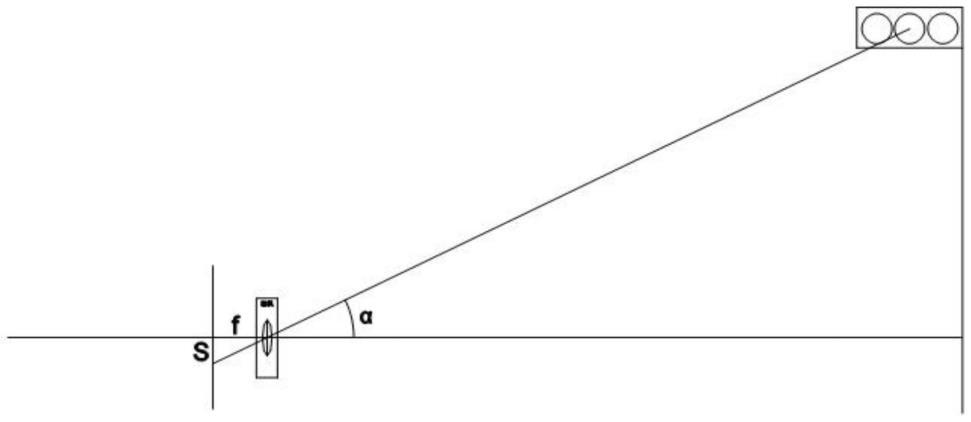
10.b2、获得取前置摄像头中心点与交通灯的高度仰角α,α=arctan(s/f),其中f是前置摄像头成像焦距,s为交通灯的成像到像片中心水平线的垂直距离;
11.b3、获取前置摄像头与交通灯之间的水平距离s
灯
,s
灯
=(s
行
*tanα2)/(tanα
1-tanα2);获取交通灯和前置摄像头之间的垂直距离h
灯
,h
灯
=tan(α2)*(s
行
*tanα2)/(tanα
1-tan
α2),其中s
行
是前置摄像头两次照相的时间间隔内公交车行驶过的距离;
12.b4、获取公交车后方的遮挡区域s
遮挡
,s
遮挡
=(s
灯
+s0)*h2/(h0+h
1-h2);
13.步骤c、交通灯状态与信息的传输
14.当倒车雷达检测到有车辆进入遮挡区域时,车机系统将步骤a识别到交通灯的状态信息实时传输给公交车后方的车载显示屏示以提示后方车辆。
15.进一步地,所述步骤b3中s
行
=∫(v
车
*δt),其中v
车
为汽车的实时车速,由车机系统内置的行车电脑直接获取,δt为相机的图像采样间隔,例:相机以30帧每秒(fps)进行图像采集,则此处δt为1/30秒。
16.进一步地,所述步骤a中交通灯识别包括交通灯颜色识别和数字识别。
17.进一步地,所述交通灯颜色识别包括:首先将rgb值转换为相应的色调、饱和度和明度(hsv)坐标;其次,利用相应色彩特征值,搜索敏感区域识别相应颜色区域,并结合交通信号灯外形特征完成结构元素的构建;再次,对所构建的结构元素实现图像二值化,并填充相应的背景色,完成识别过程。
18.与现有技术相比,本发明的优点和积极效果如下:本发明仅依靠公交车自带的车机系统、前置相机、倒车雷达、后置显示屏等部件即可完成对交通灯识别、实时准确地获取公交车后方的遮挡区域情况,并进行相应提醒。无需额外增加其他组件或模块,在对现有公交车不做任何硬件改进的情况下,通过本发明中的方法可以使公交车具备智能提醒后方被遮挡车辆交通信号灯的功能。
附图说明
19.图1是本发明前置摄像头与交通灯之间仰角关系图;
20.图2是本发明前置摄像头与交通灯之间距离关系图;
21.图3为本发明公交车后方的遮挡区域示意图。
具体实施方式
22.本发明方案设计过程:
23.起初设定公交车的车高和红绿灯高度一定,后方车辆为suv型车辆车高为1.5米,假定距离公交车5米,此时suv刚好处于可以看到红绿灯的临界状态,那如果相同情况下,车辆换为小汽车车高为1米,则小汽车中的驾驶人员由于高度变低视线被遮挡而看不到红绿灯。同理,公交车的车高和红绿灯的高度变化也会出现情况,因此只有将车高、红绿灯高、两车车距等作为自变量实时计算出遮挡阈值时才能够准确检测后方车辆是否被遮挡。
24.后期假定公交车和后方小型车辆之间的间距和车高为定值,公交车距离红绿灯距离为30米,此时后方车辆刚好处于可以看到红绿灯的临界状态;由于后方车辆驾驶人员到公交车后车顶的视线仰角一定,根据相似三角形原理,那么随着公交车距离红绿灯的距离越远,则遮挡区域越大。进一步得出,在两车车距一定的情况下,遮挡情况会随着两车到红绿灯距离不同而发生变化。
25.从以上两个说明例可以看出,设定一个固定的预设值(两车之间的距离)来当作检测遮挡的依据是十分不准确的,存在漏检和误检的情况。本发明提出一种公交车遮挡下交通信号灯的获取方法,可起到提高道路行车安全的作用。
26.本发明在提出时面临的实现难点在于公交车和红绿灯在相对运动的情况下,如何准确、实时、动态地测量公交车后方的遮挡区域,目前常见的测距方法包括雷达测距、超声测距、激光测距等,由于上述测距方法中采用的传感器无法识别高度及角度实时变化的红绿灯,因而无法完成动态测距。在设计过程,也尝试采用立体相机、深度传感器、tof(time of flight)相机等图像传感器通过完成场景的实时三维重建,虽能够从技术上实现红绿灯的动态测距。但是其缺点明显:其一、双目、深度、tof传感器对环境条件要求苛刻,包括光照、背景复杂度等变化,使得该方法在晚上或者光线条件不佳时无法完成三维重建、从而会导致实时测距失败;其二、三维场景重建的算法复杂度高,对处理器要求高,需要额外安装高性能处理器才能完成;其三、实时动态三维重建的累积漂移误差无法消除,随着公交车的持续运行,其累积误差将导致测距结果很不准确,若添加gps等辅助矫正模块可以一定程度消减该误差,但算法复杂度会进一步上升,得不偿失;其四、深度、tof、高性能处理器的成本高昂,使得该方法实用性较低。
27.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
28.本实施例提出一种公交车遮挡交通信号灯获取方法,运用公交车自带的车机系统、前置摄像头(或与车机系统互联的行车记录仪亦可)、倒车雷达、后置显示屏等设备完成对红绿灯的状态识别、后方车辆的遮挡情况检测、交通灯信号的传输与显示等过程,从而实现公交车在行驶过程中对后方遮挡车辆的实时提示,以提升后方小型车辆的道路行车安全。其方案如下:
29.一、通过前置摄像头获取图像,并进行交通灯识别;
30.公交车前部安装有监控用途的前置摄像头或行车记录仪,与车机系统互联,进行视频图像数据的传输与保存。本发明利用公交车的前置摄像头对公交车行驶方向的道路进行实时拍摄,车机系统内置芯片作为计算处理器,通过基于图像处理交通信号灯识别算法对所拍摄到的视频图像进行实时分析。具体分为两部分:交通灯颜色识别(红、绿、黄)和数字识别(红绿灯剩余时间)。
31.交通灯颜色识别具体过程为:以红色信号灯识别为例,首先将rgb值转换为相应的色调、饱和度和明度(hsv)坐标。rgb是三维颜色图数组。hsv的大小与rgb维度相同。其次,利用红色色彩特征值,搜索敏感区域识别出红色颜色区域;并结合交通信号灯外形特征完成结构元素的构建。再次,对所构建的结构元素实现图像二值化,并填充背景色,完成识别过程。
32.数字识别的具体过程:上一部分完成了对红绿灯颜色的识别,然后截取红绿灯装置的区域作为感兴趣区域(roi),在roi区域内进行数字识别可以剔除杂乱背景的影响,本发明采用knn(k-nearest neighbor)算法作为实施例说明。knn算法精度高,可用于处理数值型数据,另外,训练时间复杂度为o(n),无数据输入假定,对异常值不敏感。其具体步骤为:1)利用200张红绿灯上的数字图像作为训练数据;2)计算测试数据与各个训练数据之间的距离;3)按照距离的递增关系进行排序;4)选取距离最小的k个点;5)确定前k个点所在类别的出现频率;6)返回前k个点中出现频率最高的类别作为测试数据的预测分类。进而,通过knn算法可以完成对红绿灯装置的数字识别过程。
33.二、实时获取公交车后方的遮挡区域
34.1、获取前置摄像头安装位置和倒车雷达位置的高度差h1、公交车顶到倒车雷达位置的高度差h2、前置摄像头安装位置和倒车雷达位置的水平距离s0;以上物理量可安装时或者后期测量得到。
35.2、获得取前置摄像头中心点与交通灯的高度仰角α
36.参考图1,α为需要计算的仰角,α=arctan(s/f),其中f是前置摄像头成像焦距,s为交通灯的成像到像片中心水平线的垂直距离;本发明中高度仰角α与红绿灯的高度相关(图1中,红绿灯位于最上方位置处),与红绿灯的水平位置无关。实际行车过程中,红绿灯不一定位于公交车的正前方,但当红绿灯位于公交车正前方时,是大车对正后方车辆遮挡最为严重的情况;当红绿灯往两侧偏移时,后车司机则有可能看到红绿灯,此时大车对后车进行提醒,则为双重保险,更为安全。
37.3、获取前置摄像头与交通灯之间的水平距离s
灯
,s
灯
=(s
行
*tanα2)/(tanα
1-tanα2);获取交通灯和前置摄像头之间的垂直距离h
灯
,h
灯
=tan(α2)*(s
行
*tanα2)/(tanα
1-tanα2),其中s
行
是前置摄像头两次照相的时间间隔内公交车行驶过的距离。
38.按照如上2中所述方法可以实时计算得前置摄像头到红绿灯的仰角值分别为α1和α2;本实施例前置摄像头录像采样为30fps,即每秒拍摄30帧图像,因此,两张相邻拍摄的图像的时间间隔为1/30秒,因此需要计算这1/30秒内汽车行驶的距离。汽车速度可由车机系统的行车电脑直接获取,记为v
车
,此处,汽车行驶距离s
行
由车速和时间积分求得,具体为:
39.s
行
=∫(v
车
*δt),其中v
车
为汽车的实时车速,由车机系统内置的行车电脑直接获取,δt为相机的图像采样间隔,例:相机以30帧每秒(fps)进行图像采集,则此处δt为1/30秒。参考图2,tan(α1)=h
灯
/(s
行
+s
灯
),tan(α2)=h
灯
/s
灯
40.根据三角函数关系,我们可以列出二元一次方程组如上,进一步计算得:
41.s
灯
=(s
行
*tanα2)/(tanα
1-tanα2)
42.h
灯
=tan(α2)*(s
行
*tanα2)/(tanα
1-tanα2)
43.4、获取公交车后方的遮挡区域s
遮挡
44.s
遮挡
是需要计算出的雷达探测阈值。即当公交车的后置倒车雷达检测到后车的距离小于s
遮挡
时(即图3中阴影区域内检测到有车辆存在),则结果判定为公交车后方有被遮挡汽车,需要对其进行实时信号灯状态提醒。根据三角函数关系,我们可以列出如下二元一次方程:
45.tanβ=h2/s
遮挡
46.tanβ=(h
灯
+h1)/(s
灯
+s0+s
遮挡
)
47.由此求得s
遮挡
=(s
灯
+s0)*h2/(h0+h
1-h2)。
48.采用本发明方法,
①
计算复杂度低,对处理器要求低,公交车内置车机系统的内置芯片即可满足计算需求;
②
无需加装价格高昂的深度、tof、雷达等传感器;
③
测距精度高,从计算公式可以看出,其精度仅与所检测到的实时车速的准确度相关,无其它的场景重建或者漂移等累计误差。
49.三、交通灯状态与信息的传输
50.当倒车雷达检测到有车辆进入遮挡区域时,车机系统将步骤a识别到交通灯的状态信息实时传输给公交车后方的车载显示屏示以提示后方车辆。
51.通过本发明可实时监测公交车后方是否有被遮挡车辆,仅在有车辆进入遮挡区域才会启动交通灯提醒功能,既智能也节能;当前公交车只需更新按照本方法所设计的车机系统固件后即具备了相应的智能遮挡检测和交通信号灯提醒功能,升级方便快捷且成本低廉;在公交车后方被遮挡的小型车辆在获得实时的交通灯状态提示后可以有效减少违章和不安全驾驶的情况,提高道路行车的安全性。
52.以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1