基于北斗的城市大面积路网交通感知方法、系统及云平台与流程
1.本发明涉及北斗技术领域,具体而言,涉及一种基于北斗的城市大面积路网交通感知方法、系统及云平台。
背景技术:
2.目前在各大城市中,由于存在高楼大厦密集区域以及立交桥区域等场景,仅依靠现有的 全球定位系统(global positioning system,gps)或者北斗系统也不能保证实现城市路网的精确感知,这不仅会影响个人用户的导航体验,也会使得交管部门无法精确地对城市路网的交通状况进行感知,无法合理进行交通管制和调度。
技术实现要素:
3.本发明的目的在于提供一种基于北斗的城市大面积路网交通感知方法、系统及云平台。
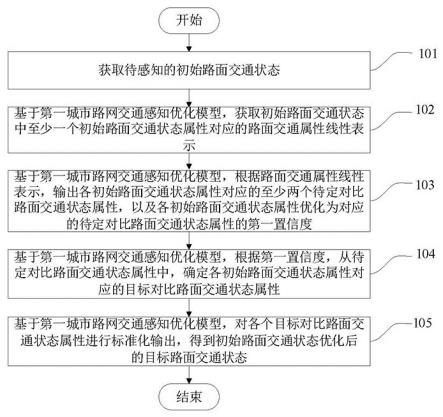
4.第一方面,本发明实施例提供一种基于北斗的城市大面积路网交通感知方法,包括:获取待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性;基于第一城市路网交通感知优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集对预设第二城市路网交通感知优化模型的权值进行更替以构建,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果,预设第二城市路网交通感知优化模型的权值是根据预设第二城市路网交通感知优化模型对目标第二路面交通参数的优化结果,与目标第二路面交通参数对应的各辅助第一路面交通参数之间的第二loss函数结果来确定的;基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度;基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性;基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态。
5.在一种可能的实施方式中,基于第一城市路网交通感知优化模型,根据路面交通
属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度,包括:基于第一城市路网交通感知优化模型中初始感知策略的第一路面交通属性线性空间和优化感知策略的第二路面交通属性线性空间之间的关联对应关系,将路面交通属性线性表示对标至第二路面交通属性线性空间中,得到参考路面交通属性线性表示;根据优化感知策略的待定路面交通状态属性值在第二路面交通属性线性空间中的路面交通属性线性表示,与参考路面交通属性线性表示的空间距离,确定待定路面交通状态属性值中各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度。
6.在一种可能的实施方式中,获取待感知的初始路面交通状态之前,还包括:获取第二路面交通参数以及多个第一实际北斗路面交通数据集,其中,每个第一实际北斗路面交通数据集包括相互匹配的已配置第一路面交通参数和已配置第二路面交通参数;基于第二城市路网交通感知优化模型,对第二路面交通参数进行优化,得到优化后的第一路面交通参数,并将优化后的第一路面交通参数,与对应的第二路面交通参数,组成虚拟北斗路面交通数据集;将虚拟北斗路面交通数据集和第一实际北斗路面交通数据集,确定为第一城市路网交通感知优化模型的实际北斗路面交通数据集训练样本,其中,已配置第一路面交通参数和优化后的第一路面交通参数为第一路面交通参数样本,已配置第二路面交通参数和第二路面交通参数为第二路面交通参数样本;基于第一城市路网交通感知优化模型,对第一路面交通参数样本进行优化,得到优化后的预测第二路面交通参数,并根据预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果,对第一城市路网交通感知优化模型进行从初始感知策略到优化感知策略的优化训练。
7.在一种可能的实施方式中,基于第二城市路网交通感知优化模型,对第二路面交通参数进行优化,得到优化后的第一路面交通参数之前,还包括:获取第二实际北斗路面交通数据集;基于预设第二城市路网交通感知优化模型,获取目标第二路面交通参数中各个目标路面交通状态属性对应的路面交通属性线性表示;根据目标路面交通状态属性对应的路面交通属性线性表示,输出各目标路面交通状态属性对应的至少两个候选初始路面交通属性值,以及各目标路面交通状态属性优化为对应的候选初始路面交通属性值的第二置信度;根据第二置信度,从候选初始路面交通属性值中,确定各目标路面交通状态属性对应的目标初始路面交通属性值;对各个目标初始路面交通属性值进行标准化输出,得到目标第二路面交通参数优化后的预测第一路面交通参数;计算同一目标第二路面交通参数的预测第一路面交通参数与对应的各辅助第一路面交通参数之间的第二loss函数结果;
根据第二loss函数结果,对预设第二城市路网交通感知优化模型的权值进行更替,得到第二城市路网交通感知优化模型。
8.在一种可能的实施方式中,根据目标路面交通状态属性对应的路面交通属性线性表示,输出各目标路面交通状态属性对应的至少两个候选初始路面交通属性值,以及各目标路面交通状态属性优化为对应的候选初始路面交通属性值的第二置信度,包括:获取初始路面交通属性值集合,其中,初始路面交通属性值集合包括多个初始路面交通属性值;基于预设第二城市路网交通感知优化模型中优化感知策略的第二路面交通属性线性空间和初始感知策略的第一路面交通属性线性空间之间的关联对应关系,将目标路面交通状态属性的路面交通属性线性表示对标至第一路面交通属性线性空间中,得到第一参考路面交通属性线性表示;根据初始路面交通属性值在第一路面交通属性线性空间中的路面交通属性线性表示,与第一参考路面交通属性线性表示的空间距离,确定初始路面交通属性值中各目标路面交通状态属性对应的至少两个候选初始路面交通属性值,以及各目标路面交通状态属性优化为对应的候选初始路面交通属性值的第二置信度。
9.在一种可能的实施方式中,计算同一目标第二路面交通参数的预测第一路面交通参数与对应的各辅助第一路面交通参数之间的第二loss函数结果,包括:对于同一目标第二路面交通参数,计算其目标路面交通状态属性对应的候选初始路面交通属性值,与目标第二路面交通参数对应的辅助第一路面交通参数中,目标路面交通状态属性对应的目标路面交通属性值之间的第一匹配度;根据第一匹配度和第二置信度,计算目标第二路面交通参数中各目标路面交通状态属性对应的候选初始路面交通属性值与目标路面交通属性值之间的路面交通属性损失;对各目标路面交通状态属性对应的路面交通属性损失进行标准化输出,得到目标第二路面交通参数的预测第一路面交通参数与对应的各辅助第一路面交通参数之间的第二loss函数结果。
10.在一种可能的实施方式中,基于第一城市路网交通感知优化模型,对第一路面交通参数样本进行优化,得到优化后的预测第二路面交通参数之前,还包括:获取第三实际北斗路面交通数据集,其中,一个第三实际北斗路面交通数据集包括一个目标第一路面交通参数,以及对应的多个辅助第二路面交通参数,辅助第二路面交通参数是目标第一路面交通参数的优化路面交通感知结果;基于预设第一城市路网交通感知优化模型,获取目标第一路面交通参数中各个目标路面交通状态属性对应的路面交通属性线性表示;获取优化路面交通属性值集合,其中,优化路面交通属性值集合包括多个优化路面交通属性值;基于预设第一城市路网交通感知优化模型中初始感知策略的第一路面交通属性线性空间和优化感知策略的第二路面交通属性线性空间之间的关联对应关系,将目标路面交通状态属性的路面交通属性线性表示对标至第二路面交通属性线性空间中,得到第二参考路面交通属性线性表示;根据优化路面交通属性值在第二路面交通属性线性空间中的路面交通属性线性
表示,与第二参考路面交通属性线性表示的空间距离,确定优化路面交通属性值中各目标路面交通状态属性对应的至少两个候选优化路面交通属性值,以及各目标路面交通状态属性优化为对应的候选优化路面交通属性值的第三置信度;根据第三置信度,从候选优化路面交通属性值中,确定各目标路面交通状态属性对应的目标优化路面交通属性值;对各个目标优化路面交通属性值进行标准化输出,得到目标第一路面交通参数优化后的预测目标第二路面交通参数;对于同一目标第一路面交通参数,计算其目标路面交通状态属性对应的候选优化路面交通属性值,与目标第一路面交通参数对应的辅助第二路面交通参数中,目标路面交通状态属性对应的目标路面交通属性值之间的第二匹配度;根据第二匹配度和第三置信度,计算目标第一路面交通参数中各目标路面交通状态属性对应的候选优化路面交通属性值与目标路面交通属性值之间的路面交通属性损失;对各目标路面交通状态属性对应的路面交通属性损失进行标准化输出,得到目标第一路面交通参数的预测目标第二路面交通参数与对应的各辅助第二路面交通参数之间的第三loss函数结果;根据第三loss函数结果,对预设第一城市路网交通感知优化模型的权值进行更替,得到第一城市路网交通感知优化模型。
11.在一种可能的实施方式中,基于第一城市路网交通感知优化模型,对第一路面交通参数样本进行优化,得到优化后的预测第二路面交通参数,并根据预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果,对第一城市路网交通感知优化模型进行从初始感知策略到优化感知策略的优化训练,包括:基于第一城市路网交通感知优化模型,获取第一路面交通参数样本中各个路面交通状态属性对应的路面交通属性线性表示;根据路面交通属性线性表示,输出各路面交通状态属性对应的至少两个待选路面交通状态属性,以及各路面交通状态属性优化为对应的待选路面交通状态属性的第四置信度;根据第四置信度,从待选路面交通状态属性中,确定各路面交通状态属性对应的目标路面交通状态属性,并对各个目标路面交通状态属性进行标准化输出,得到预测第二路面交通参数;计算预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果;根据第一loss函数结果,对第一城市路网交通感知优化模型的权值进行更替,得到训练好的第一城市路网交通感知优化模型。
12.第二方面,本发明实施例提供一种基于北斗的城市大面积路网交通感知系统,包括:获取模块,用于获取待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性;基于第一城市路网交通感知优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集
包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集对预设第二城市路网交通感知优化模型的权值进行更替以构建,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果,预设第二城市路网交通感知优化模型的权值是根据预设第二城市路网交通感知优化模型对目标第二路面交通参数的优化结果,与目标第二路面交通参数对应的各辅助第一路面交通参数之间的第二loss函数结果来确定的;输出模块,用于基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度;优化模块,用于基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性;基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态。
13.第三方面,本发明实施例提供一种基于北斗的城市大面积路网交通感知云平台,包括用于执行第一方面中至少一种可能的实施方式的计算机设备,以及用于接收目标路面交通状态的用户终端。
14.相比现有技术,本发明提供的有益效果包括:采用本发明公开了一种基于北斗的城市大面积路网交通感知方法、系统及云平台,通过获取待感知的初始路面交通状态;然后基于第一城市路网交通感知优化模型,获取初始路面交通状态属性对应的路面交通属性线性表示,再输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度,以从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性;最终对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态,如此设计,能够提高对于城市大面积路网交通状况的感知精确度。
附图说明
15.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍。应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定。对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
16.图1为本发明实施例提供的一种基于北斗的城市大面积路网交通感知云平台的交互示意图结构示意图;图2为本发明实施例提供的一种基于北斗的城市大面积路网交通感知方法的步骤流程示意图;图3为本发明实施例提供的用于执行图2中一种基于北斗的城市大面积路网交通感知方法的一种基于北斗的城市大面积路网交通系统的结构示意图;
图4为本发明实施例提供的用于执行图2中一种基于北斗的城市大面积路网交通感知方法的计算机设备的结构示意图。
具体实施方式
17.下面结合附图,对本发明的具体实施方式进行详细说明。
18.图1是本公开一种实施例提供的一种基于北斗的城市大面积路网交通感知云平台的交互示意图。基于北斗的城市大面积路网交通感知云平台可以包括计算机设备100和用户终端200,用户终端200与计算机设备100之间基于网络连接,比如,基于无线网络连接等。
19.其中,用户终端200,可以获取待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性,再将该初始路面交通状态发送给计算机设备100,以便于计算机设备100对该初始路面交通状态进行优化,并返回优化结果给用户终端200,如将初始路面交通状态优化后的目标路面交通状态发送给用户终端200。
20.计算机设备100,可以用于:接收用户终端200发送的初始路面交通状态;基于第一城市路网交通感知优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果;基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度;基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性;基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态;将该目标路面交通状态发送给用户终端200。
21.本技术实施例提供的基于北斗的城市大面积路网交通感知方法涉及人工智能领域中的交通感知技术,具体涉及交通感知技术中的机器优化。本技术实施例可以根据多个辅助第一路面交通参数,对第二城市路网交通感知优化模型进行训练,增加了所构造的虚拟北斗路面交通数据集的多样性,给第一城市路网交通感知优化模型的训练提供更加丰富的原始信息,进而提升了优化质量。
22.路面交通数据基于现有的交通感知策略确定的路面交通状态更加精确的路面交通状态本技术实施例提供的基于北斗的城市大面积路网交通感知方法还可以涉及云技术领域中的人工智能云服务。
23.本技术实施例的基于北斗的城市大面积路网交通感知方法可以应用于各种优化的场景下,将基于现有的交通感知策略确定的路面交通状态优化到更加精确的路面交通状态,其中,优化的基于现有的交通感知策略确定的路面交通状态和更加精确的路面交通状态的感知区域类型不限,如可以用于市中心、环岛线路、小区等。
24.请结合参阅图2,该基于北斗的城市大面积路网交通感知方法的具体流程可以如下:101、获取待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性。
25.其中,初始路面交通状态属于初始感知策略,初始感知策略的感知区域不限。对初始路面交通状态进行解析处理,可以得到该初始路面交通状态中的各个初始路面交通状态属性。
26.可选的,一些实施例中,初始路面交通状态可以是由对应的终端中已安装的路面交通感知应用(例如现有导航软件)确定的。
27.102、基于第一城市路网交通感知优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果。
28.其中,可以基于bert模型(bidirectional encoderrepresentations from transformers)等将初始路面交通状态中各个初始路面交通状态属性转换为对应的路面交通属性线性表示。
29.其中,第一城市路网交通感知优化模型和第二城市路网交通感知优化模型的类型可以是卷积神经网络(convolutionneural network,cnn)、循环神经网络(rnn,recurrent neural network)、时间递归神经网络(lstm,long short term memory)以及双向循环神经网络(birnn,bidirectionalrecurrent neural network)等。需要说明的是,上述举例不应理解为对第一城市路网交通感知优化模型和第二城市路网交通感知优化模型的限制。
30.其中,第二城市路网交通感知优化模型是根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及对应的具有相同感知目标的多个辅助第一路面交通参数,各个辅助第一路面交通参数的参数类型不同、所处应用环境不同,也即,第二城市路网交通感知优化模型是根据多个优化路面交通感知结果训练得到的。由于每个优化路面交通感知结果的感知区域和所处应用环境不同,因此,训练后的第二城市路网交通感知优化模型优化第二路面交通参数,能够应对多样化的感知需求。
31.本实施例中,实际北斗路面交通数据集包括了原始路面交通参数和目标路面交通参数,基于现有的交通感知策略确定的路面交通状态是可以被优化为另一种路面交通状态的路面交通状态,而被优化为的路面交通状态则为更加精确的路面交通状态。每个实际北斗路面交通数据集包括相互匹配的原始路面交通参数和目标路面交通参数。基于现有的交通感知策略确定的路面交通状态和更加精确的路面交通状态通常是不同的感知区域。
32.城市路网交通感知路面交通参数路面交通参数本实施例中,对于第一城市路网交通感知优化模型,基于现有的交通感知策略确定的路面交通状态可以为初始感知策略,更
加精确的路面交通状态可以为优化感知策略。实际北斗路面交通数据集具体可以是属于初始感知策略的路面交通数据和对应的属于优化感知策略的路面交通数据构成的数据对。
33.在一些应用场景中,要获取大量的实际北斗路面交通数据集并不容易,尤其是涉及特定路面感知场景的,比如高楼、立交桥、隧道等区域,该场景的实际北斗路面交通数据集获取难度较大,在该场景中不少初始感知结果缺少对应的优化感知结果。
34.在缺少实际北斗路面交通数据集的情况下,可以基于第二城市路网交通感知优化模型来构造虚拟北斗路面交通数据集,虚拟北斗路面交通数据集包括第一路面交通参数和第二路面交通参数。在获取到第二路面交通参数情况下,可以将该第二路面交通参数输入到第二城市路网交通感知优化模型,获取与该第二路面交通参数匹配的第一路面交通参数,进而构造虚拟北斗路面交通数据集。基于虚拟北斗路面交通数据集,可以提高一些特定路面感知场景的感知优化的准确性。
35.需要说明的是,一个实际北斗路面交通数据集中包括相互匹配的原始路面交通参数和目标路面交通参数,其中,原始路面交通参数和目标路面交通参数的关系可以是一对一,也可以是一对多等等,本实施例对此不作限制。也就是说,原始路面交通参数可以具有一个优化路面交通感知结果,也可以具有多个优化路面交通感知结果。
36.103、基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度。
37.可选的,在一些实施例中,步骤“基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度”,可以包括:基于第一城市路网交通感知优化模型中初始感知策略的第一路面交通属性线性空间和优化感知策略的第二路面交通属性线性空间之间的关联对应关系,将路面交通属性线性表示对标至第二路面交通属性线性空间中,得到参考路面交通属性线性表示;根据优化感知策略的待定路面交通状态属性值在第二路面交通属性线性空间中的路面交通属性线性表示,与参考路面交通属性线性表示的空间距离,确定待定路面交通状态属性值中各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度。
38.其中,待定路面交通状态属性值属于优化感知策略。
39.其中,将初始路面交通状态属性对应的路面交通属性线性表示对标至第二路面交通属性线性空间中,得到参考路面交通属性线性表示,具体可以对初始路面交通状态属性的路面交通属性线性表示进行卷积操作以及池化操作,以得到对应在第二路面交通属性线性空间中的参考路面交通属性线性表示。
40.其中,步骤“根据优化感知策略的待定路面交通状态属性值在第二路面交通属性线性空间中的路面交通属性线性表示,与参考路面交通属性线性表示的空间距离,确定待定路面交通状态属性值中各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度”,可以包括:
计算优化感知策略的待定路面交通状态属性值在第二路面交通属性线性空间中的路面交通属性线性表示,与参考路面交通属性线性表示的空间距离;根据空间距离,确定待定路面交通状态属性值中各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性;输出各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度。
41.其中,空间距离具体可以是欧式距离、余弦距离和曼哈顿距离等等,本实施例对此不作限制。空间距离越大,则该待定路面交通状态属性值与对应的初始路面交通状态属性的感知目标相差越大,空间距离越小,则该待定路面交通状态属性值与对应的初始路面交通状态属性的感知目标越接近。
42.本实施例中,可以将空间距离小于预设距离的待定路面交通状态属性值确定为待定对比路面交通状态属性,其中,该预设距离可以根据实际情况进行设置,本实施例对此不作限制。比如,可以根据需要获取的待定对比路面交通状态属性的数量对其进行设置。
43.其中,可以基于第一城市路网交通感知优化模型中的全连接层,输出各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度。
44.104、基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性。
45.其中,针对每个初始路面交通状态属性,可以将第一置信度最大的待定对比路面交通状态属性作为初始路面交通状态属性对应的目标对比路面交通状态属性。
46.105、基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态。
47.其中,该第一城市路网交通感知优化模型和第二城市路网交通感知优化模型是已经训练好的,由于第二城市路网交通感知优化模型是根据多个优化路面交通感知结果训练得到的,因此基于第二城市路网交通感知优化模型构造的虚拟北斗路面交通数据集中的第一路面交通参数相对更具有多样性;第一城市路网交通感知优化模型是根据第二城市路网交通感知优化模型构造的虚拟北斗路面交通数据集训练得到,对于第一城市路网交通感知优化模型,可以增加虚拟北斗路面交通数据集中原始感知结果的多样性,从而基于更加丰富的原始信息,来增强第一城市路网交通感知优化模型的优化质量。
48.其中,对目标对比路面交通状态属性的融合方式具体可以是将各个目标对比路面交通状态属性按照一定的方式进行拼接,得到目标路面交通状态。
49.需要说明的是,该第一城市路网交通感知优化模型可以由多个实际北斗路面交通数据集训练样本训练得到,该实际北斗路面交通数据集训练样本可以包括虚拟北斗路面交通数据集和第一实际北斗路面交通数据集,其中,每个第一实际北斗路面交通数据集包括相互匹配的已配置第一路面交通参数和已配置第二路面交通参数,已配置第一路面交通参数和已配置第二路面交通参数具有相同感知目标。该第一城市路网交通感知优化模型可以由其他设备进行训练后,提供给该根据人工智能的优化装置,或者,也可以由该根据人工智能的优化装置自行进行训练。
50.若由该根据人工智能的优化装置自行进行训练,则在步骤“获取待感知的初始路面交通状态”之前,该基于北斗的城市大面积路网交通感知方法还可以包括:
获取第二路面交通参数以及多个第一实际北斗路面交通数据集,其中,每个第一实际北斗路面交通数据集包括相互匹配的已配置第一路面交通参数和已配置第二路面交通参数;基于第二城市路网交通感知优化模型,对第二路面交通参数进行优化,得到优化后的第一路面交通参数,并将优化后的第一路面交通参数,与对应的第二路面交通参数,组成虚拟北斗路面交通数据集;将虚拟北斗路面交通数据集和第一实际北斗路面交通数据集,确定为第一城市路网交通感知优化模型的实际北斗路面交通数据集训练样本,其中,已配置第一路面交通参数和第一路面交通参数为第一路面交通参数样本,已配置第二路面交通参数和第二路面交通参数为第二路面交通参数样本;基于第一城市路网交通感知优化模型,对第一路面交通参数样本进行优化,得到优化后的预测第二路面交通参数,并根据预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果,对第一城市路网交通感知优化模型进行从初始感知策略到优化感知策略的优化训练。
51.其中,一组实际北斗路面交通数据集训练样本包括相互匹配的第一路面交通参数样本和第二路面交通参数样本,实际北斗路面交通数据集训练样本可认为是虚拟北斗路面交通数据集和第一实际北斗路面交通数据集合并得到的。
52.其中,第一城市路网交通感知优化模型的基于现有的交通感知策略确定的路面交通状态是第二城市路网交通感知优化模型的更加精确的路面交通状态,第一城市路网交通感知优化模型的更加精确的路面交通状态是第二城市路网交通感知优化模型的基于现有的交通感知策略确定的路面交通状态,也即,第一城市路网交通感知优化模型的基于现有的交通感知策略确定的路面交通状态是初始感知策略,第一城市路网交通感知优化模型的更加精确的路面交通状态是优化感知策略。可以理解的是,可以将第一城市路网交通感知优化模型视作正向城市路网交通感知优化模型,第二城市路网交通感知优化模型视作反向城市路网交通感知优化模型。其中,正向可认为是基于现有的交通感知策略确定的路面交通状态到更加精确的路面交通状态方向(即从左到右(left-to-right,简称l2r)),反向可认为是从更加精确的路面交通状态到基于现有的交通感知策略确定的路面交通状态方向(即从右到左(right-to-left,简称r2l))。
53.本技术可以基于反向城市路网交通感知优化模型将测试路面交通参数(即前面实施例所提及的第二路面交通参数)优化为需求路面交通参数(即前面实施例所提及的第一路面交通参数),来构造虚拟北斗路面交通数据集,与实际北斗路面交通数据集合并进行数据增强,进而提升正向城市路网交通感知优化模型的质量,其流程可以包括以下步骤:1001、使用多样性驱动的训练目标(ddt)训练反向城市路网交通感知优化模型,其中,多样性具体指优化路面交通感知结果的多样性;具体地,可以获取实际北斗路面交通数据集,每个实际北斗路面交通数据集可以包括一个目标路面交通参数(即前面实施例所提及的目标第二路面交通参数)和其对应的多个原始路面交通参数(即前面实施例所提及的辅助第一路面交通参数),原始路面交通参数为目标路面交通参数的优化路面交通感知结果,基于反向城市路网交通感知优化模型对目标路面交通参数进行优化,得到优化后的预测第一路面交通参数,根据目标路面交通参数对应的各个优化路面交通感知结果与该预测
第一路面交通参数之间的loss函数结果,对反向城市路网交通感知优化模型进行训练;1002、使用训练好的反向城市路网交通感知优化模型优化测试路面交通参数,输出更具多样性的基于现有的交通感知策略确定的路面交通状态展示结果,该基于现有的交通感知策略确定的路面交通状态展示结果即需求路面交通参数,需求路面交通参数与对应的测试路面交通参数构成虚拟北斗路面交通数据集,从而丰富了所构造虚拟北斗路面交通数据集中基于现有的交通感知策略确定的路面交通状态的信息;1003、将该虚拟北斗路面交通数据集与实际北斗路面交通数据集合并,得到合并的实际北斗路面交通数据集,合并的实际北斗路面交通数据集包括合并的原始路面交通参数和合并的目标路面交通参数;将合并的原始路面交通参数作为正向城市路网交通感知优化模型的输入,得到优化后的预测第二路面交通参数,并根据预测第二路面交通参数与对应的目标路面交通参数之间的极大似然估计(maximum likelihood estimate,简称mle)的交叉熵,对正向城市路网交通感知优化模型进行训练。
54.其中,需要强调的是,该第二城市路网交通感知优化模型是已经训练好的。由于第二城市路网交通感知优化模型是根据多个优化路面交通感知结果训练得到的,因此基于第二城市路网交通感知优化模型构造的虚拟北斗路面交通数据集中的第一路面交通参数相对更具有多样性。对于第一城市路网交通感知优化模型,可以增加虚拟北斗路面交通数据集中原始感知结果的多样性,丰富原始信息。
55.可选的,在一些实施例中,步骤“基于第一城市路网交通感知优化模型,对第一路面交通参数样本进行优化,得到优化后的预测第二路面交通参数,并根据预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果,对第一城市路网交通感知优化模型进行从初始感知策略到优化感知策略的优化训练”,可以包括:基于第一城市路网交通感知优化模型,获取第一路面交通参数样本中各个路面交通状态属性对应的路面交通属性线性表示;根据路面交通属性线性表示,输出各路面交通状态属性对应的至少两个待选路面交通状态属性,以及各路面交通状态属性优化为对应的待选路面交通状态属性的第四置信度;根据第四置信度,从待选路面交通状态属性中,确定各路面交通状态属性对应的目标路面交通状态属性,并对各个目标路面交通状态属性进行标准化输出,得到预测第二路面交通参数;计算预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果;根据第一loss函数结果,对第一城市路网交通感知优化模型的权值进行更替,得到训练好的第一城市路网交通感知优化模型。
56.其中,在第一城市路网交通感知优化模型的优化过程中,与优化路面交通感知结果(即对应的第二路面交通参数样本)中空间距离相近的待选路面交通状态属性的第四置信度会增加。
57.其中,根据各路面交通状态属性的路面交通属性线性表示,输出各路面交通状态属性对应的待选路面交通状态属性的具体过程可以参考上述实施例。步骤“根据路面交通
属性线性表示,输出各路面交通状态属性对应的至少两个待选路面交通状态属性,以及各路面交通状态属性优化为对应的待选路面交通状态属性的第四置信度”,可以包括:基于第一城市路网交通感知优化模型中初始感知策略的第一路面交通属性线性空间和优化感知策略的第二路面交通属性线性空间之间的关联对应关系,将路面交通属性线性表示对标至第二路面交通属性线性空间中,得到参考路面交通属性线性表示;根据优化感知策略的待定路面交通状态属性值在第二路面交通属性线性空间中的路面交通属性线性表示,与参考路面交通属性线性表示的空间距离,确定待定路面交通状态属性值中各路面交通状态属性对应的至少两个待选路面交通状态属性,以及各路面交通状态属性优化为对应的待选路面交通状态属性的第四置信度。
58.其中,针对每个路面交通状态属性,可以将第四置信度最大的待选路面交通状态属性作为该路面交通状态属性对应的目标路面交通状态属性。
59.其中,第一城市路网交通感知优化模型输出感知结果(即预测第二路面交通参数)中的每个参量时,不仅受到训练集中优化路面交通感知结果(即对应的第二路面交通参数样本)的指导,同时也会考虑那些没有被优化路面交通感知结果中参考参量所覆盖但是也可能正确的参量。
60.其中,步骤“计算预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果”,可以包括:计算预测第二路面交通参数中各个目标路面交通状态属性与第二路面交通参数样本中对应的样本路面交通状态属性的路面交通属性损失;对预测第二路面交通参数中各个目标路面交通状态属性对应的路面交通属性损失进行标准化输出,得到预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果。
61.其中,可以根据目标路面交通状态属性对应的路面交通属性线性表示,与样本路面交通状态属性对应的路面交通属性线性表示之间的向量距离,来计算路面交通属性损失。该向量距离可以包括欧式距离或余弦距离等。
62.其中,对各个目标路面交通状态属性对应的路面交通属性损失的融合具体可以是对各个目标路面交通状态属性对应的路面交通属性损失进行加权求和,得到第一loss函数结果。
63.可选的,一些实施例中,步骤“计算预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果”,可以包括:获取各路面交通状态属性优化为对应的第二路面交通参数样本中样本路面交通状态属性的置信度;根据置信度,计算预测第二路面交通参数与第一路面交通参数样本对应的第二路面交通参数样本之间的第一loss函数结果。
64.可选的,一些实施例,步骤“根据第一loss函数结果,对第一城市路网交通感知优化模型的权值进行更替,得到训练好的第一城市路网交通感知优化模型”,具体可以包括:采用反向传播算法(bp,backpropagation)或者随机梯度下降算法(sgd,stochasticgradient descent)来确定第一城市路网交通感知优化模型的权值,根据第一loss函数结果,优化第一城市路网交通感知优化模型的权值,使第一loss函数结果小于预
设loss函数结果,得到训练好的第一城市路网交通感知优化模型。其中,预设loss函数结果可以根据实际情况进行设置。
65.其中,第二城市路网交通感知优化模型是根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及对应的多个辅助第一路面交通参数。该第二城市路网交通感知优化模型可以由其他设备进行训练后,提供给该根据人工智能的优化装置,或者,也可以由该根据人工智能的优化装置自行进行训练。
66.可选的,本实施例中,该第一城市路网交通感知优化模型可以是根据第三实际北斗路面交通数据集,预先训练得到的。一个第三实际北斗路面交通数据集包括一个目标第一路面交通参数,以及对应的多个辅助第二路面交通参数,辅助第二路面交通参数是目标第一路面交通参数的优化路面交通感知结果,各个辅助第二路面交通参数的参数类型不同、所处应用环境不同。该第一城市路网交通感知优化模型可以由其他设备进行训练后,提供给该根据人工智能的优化装置,或者,也可以由该根据人工智能的优化装置自行进行训练。
67.若该第二城市路网交通感知优化模型由该根据人工智能的优化装置自行进行训练,则在步骤“基于第二城市路网交通感知优化模型,对第二路面交通参数进行优化,得到优化后的第一路面交通参数”之前,该基于北斗的城市大面积路网交通感知方法还可以包括:获取第二实际北斗路面交通数据集,其中,一个第二实际北斗路面交通数据集包括一个目标第二路面交通参数,以及对应的多个辅助第一路面交通参数,辅助第一路面交通参数是目标第二路面交通参数的优化路面交通感知结果;基于预设第二城市路网交通感知优化模型,对目标第二路面交通参数进行优化,得到优化后的预测第一路面交通参数;计算同一目标第二路面交通参数的预测第一路面交通参数与对应的各辅助第一路面交通参数之间的第二loss函数结果;根据第二loss函数结果,对预设第二城市路网交通感知优化模型的权值进行更替,得到第二城市路网交通感知优化模型。
68.其中,可以采用反向传播算法或者随机梯度下降算法来确定预设第二城市路网交通感知优化模型的权值,根据第二loss函数结果,优化预设第二城市路网交通感知优化模型的权值,使第二loss函数结果小于预设loss函数结果,得到第二城市路网交通感知优化模型。其中,预设loss函数结果可以根据实际情况进行设置。
69.可选的,在一些实施例中,步骤“基于预设第二城市路网交通感知优化模型,对目标第二路面交通参数进行优化,得到优化后的预测第一路面交通参数”,可以包括:基于预设第二城市路网交通感知优化模型,获取目标第二路面交通参数中各个目标路面交通状态属性对应的路面交通属性线性表示;根据路面交通属性线性表示,输出各目标路面交通状态属性对应的至少两个候选初始路面交通属性值,以及各目标路面交通状态属性优化为对应的候选初始路面交通属性值的第二置信度;根据第二置信度,从候选初始路面交通属性值中,确定各目标路面交通状态属性
对应的目标初始路面交通属性值;对各个目标初始路面交通属性值进行标准化输出,得到目标第二路面交通参数优化后的预测第一路面交通参数。
70.其中,针对每个目标路面交通状态属性,可以将第二置信度最大的候选初始路面交通属性值作为该目标路面交通状态属性对应的目标初始路面交通属性值,该目标初始路面交通属性值也可视为该目标路面交通状态属性的优化结果。对各个目标初始路面交通属性值融合方式具体可以是将各个目标初始路面交通属性值按照一定的方式进行拼接,得到预测第一路面交通参数。
71.其中,第二城市路网交通感知优化模型输出感知结果(即预测第一路面交通参数)中的每个参量时,不仅受到训练集中优化路面交通感知结果(即对应的辅助第一路面交通参数)的指导,同时也会考虑那些没有被优化路面交通感知结果中参考参量所覆盖但是也可能正确的参量(与优化路面交通感知结果感知目标相近)。
72.可选的,在一些实施例中,步骤“根据路面交通属性线性表示,输出各目标路面交通状态属性对应的至少两个候选初始路面交通属性值,以及各目标路面交通状态属性优化为对应的候选初始路面交通属性值的第二置信度”,可以包括:获取初始路面交通属性值集合,其中,初始路面交通属性值集合包括多个初始路面交通属性值;基于预设第二城市路网交通感知优化模型中优化感知策略的第二路面交通属性线性空间和初始感知策略的第一路面交通属性线性空间之间的关联对应关系,将目标路面交通状态属性的路面交通属性线性表示对标至第一路面交通属性线性空间中,得到第一参考路面交通属性线性表示;根据初始路面交通属性值在第一路面交通属性线性空间中的路面交通属性线性表示,与第一参考路面交通属性线性表示的空间距离,确定初始路面交通属性值中各目标路面交通状态属性对应的至少两个候选初始路面交通属性值,以及各目标路面交通状态属性优化为对应的候选初始路面交通属性值的第二置信度。
73.其中,将目标路面交通状态属性的路面交通属性线性表示对标至第一路面交通属性线性空间中,得到第一参考路面交通属性线性表示,具体可以对目标路面交通状态属性的路面交通属性线性表示进行卷积操作以及池化操作,以得到对应在第一路面交通属性线性空间中的第一参考路面交通属性线性表示。
74.其中,空间距离具体可以是欧式距离、余弦距离和曼哈顿距离等等,本实施例对此不作限制。可以将空间距离小于预设距离的初始路面交通属性值确定为候选初始路面交通属性值,该预设距离可以根据实际情况进行设置,本实施例对此不作限制。
75.其中,在预设第二城市路网交通感知优化模型的优化过程中,与优化路面交通感知结果(即对应的辅助第一路面交通参数)中空间距离相近的候选初始路面交通属性值的第二置信度会增加。
76.可选的,在一些实施例中,步骤“计算同一目标第二路面交通参数的预测第一路面交通参数与对应的各辅助第一路面交通参数之间的第二loss函数结果”,可以包括:对于同一目标第二路面交通参数,计算其目标路面交通状态属性对应的候选初始路面交通属性值,与目标第二路面交通参数对应的辅助第一路面交通参数中,目标路面交
通状态属性对应的目标路面交通属性值之间的第一匹配度;根据第一匹配度和第二置信度,计算目标第二路面交通参数中各目标路面交通状态属性对应的候选初始路面交通属性值与目标路面交通属性值之间的路面交通属性损失;对各目标路面交通状态属性对应的路面交通属性损失进行标准化输出,得到目标第二路面交通参数的预测第一路面交通参数与对应的各辅助第一路面交通参数之间的第二loss函数结果。
77.其中,目标路面交通状态属性对应有多个候选初始路面交通属性值,第一匹配度包括目标路面交通状态属性对应的各个候选初始路面交通属性值与对应的目标路面交通属性值之间的匹配度。
78.其中,该第一匹配度具体可以基于向量距离来度量,该向量距离具体指候选初始路面交通属性值的路面交通属性线性表示和目标路面交通属性值的路面交通属性线性表示之间的向量距离。向量距离越大,第一匹配度越小;向量距离越小,第一匹配度越大。该向量距离具体可以是欧式距离,也可以是余弦距离等。
79.其中,对各目标路面交通状态属性对应的路面交通属性损失进行标准化输出,具体可以是将各目标路面交通状态属性对应的路面交通属性损失进行加权求和。
80.第一城市路网交通感知优化模型的预训练。
81.若该第一城市路网交通感知优化模型由该根据人工智能的优化装置进行预训练,则在步骤“基于第一城市路网交通感知优化模型,对第一路面交通参数样本进行优化,得到优化后的预测第二路面交通参数”之前,该基于北斗的城市大面积路网交通感知方法还可以包括:获取第三实际北斗路面交通数据集,其中,一个第三实际北斗路面交通数据集包括一个目标第一路面交通参数,以及对应的多个辅助第二路面交通参数,辅助第二路面交通参数是目标第一路面交通参数的优化路面交通感知结果;基于预设第一城市路网交通感知优化模型,对目标第一路面交通参数进行优化,得到优化后的预测目标第二路面交通参数;计算同一目标第一路面交通参数的预测目标第二路面交通参数与对应的各辅助第二路面交通参数之间的第三loss函数结果;根据第三loss函数结果,对预设第一城市路网交通感知优化模型的权值进行更替,得到第一城市路网交通感知优化模型。
82.其中,可以采用反向传播算法或者随机梯度下降算法来确定预设第一城市路网交通感知优化模型的权值,根据第三loss函数结果,优化预设第一城市路网交通感知优化模型的权值,使第三loss函数结果小于预设loss函数结果,得到第一城市路网交通感知优化模型。其中,预设loss函数结果可以根据实际情况进行设置。
83.可选的,在一些实施例中,步骤“基于预设第一城市路网交通感知优化模型,对目标第一路面交通参数进行优化,得到优化后的预测目标第二路面交通参数”,可以包括:基于预设第一城市路网交通感知优化模型,获取目标第一路面交通参数中各个目标路面交通状态属性对应的路面交通属性线性表示;根据路面交通属性线性表示,输出各目标路面交通状态属性对应的至少两个候选优化路面交通属性值,以及各目标路面交通状态属性优化为对应的候选优化路面交通属性
值的第三置信度;根据第三置信度,从候选优化路面交通属性值中,确定各目标路面交通状态属性对应的目标优化路面交通属性值;对各个目标优化路面交通属性值进行标准化输出,得到目标第一路面交通参数优化后的预测目标第二路面交通参数。
84.其中,针对每个目标路面交通状态属性,可以将第三置信度最大的候选优化路面交通属性值作为该目标路面交通状态属性对应的目标优化路面交通属性值,该目标优化路面交通属性值也可视为该目标路面交通状态属性的优化结果。对各个目标优化路面交通属性值融合方式具体可以是将各个目标优化路面交通属性值按照一定的方式进行拼接,得到预测目标第二路面交通参数。
85.其中,预设第一城市路网交通感知优化模型输出感知结果(即预测目标第二路面交通参数)中的每个参量时,不仅受到训练集中优化路面交通感知结果(即对应的辅助第二路面交通参数)的指导,同时也会考虑那些没有被优化路面交通感知结果中参考参量所覆盖但是也可能正确的参量(与优化路面交通感知结果感知目标相近)。
86.可选的,在一些实施例中,步骤“根据路面交通属性线性表示,输出各目标路面交通状态属性对应的至少两个候选优化路面交通属性值,以及各目标路面交通状态属性优化为对应的候选优化路面交通属性值的第三置信度”,可以包括:获取优化路面交通属性值集合,其中,优化路面交通属性值集合包括多个优化路面交通属性值;基于预设第一城市路网交通感知优化模型中初始感知策略的第一路面交通属性线性空间和优化感知策略的第二路面交通属性线性空间之间的关联对应关系,将目标路面交通状态属性的路面交通属性线性表示对标至第二路面交通属性线性空间中,得到第二参考路面交通属性线性表示;根据优化路面交通属性值在第二路面交通属性线性空间中的路面交通属性线性表示,与第二参考路面交通属性线性表示的空间距离,确定优化路面交通属性值中各目标路面交通状态属性对应的至少两个候选优化路面交通属性值,以及各目标路面交通状态属性优化为对应的候选优化路面交通属性值的第三置信度。
87.其中,将目标路面交通状态属性的路面交通属性线性表示对标至第二路面交通属性线性空间中,得到第二参考路面交通属性线性表示,具体可以对目标路面交通状态属性的路面交通属性线性表示进行卷积操作以及池化操作,以得到对应在第二路面交通属性线性空间中的第二参考路面交通属性线性表示。
88.其中,空间距离具体可以是欧式距离、余弦距离和曼哈顿距离等等,本实施例对此不作限制。可以将空间距离小于预设距离的优化路面交通属性值确定为候选优化路面交通属性值,该预设距离可以根据实际情况进行设置,本实施例对此不作限制。
89.其中,在预设第一城市路网交通感知优化模型的优化过程中,与优化路面交通感知结果(即对应的辅助第二路面交通参数)中空间距离相近的候选优化路面交通属性值的第三置信度会增加。
90.可选的,在一些实施例中,步骤“计算同一目标第一路面交通参数的预测目标第二路面交通参数与对应的各辅助第二路面交通参数之间的第三loss函数结果”,可以包括:
对于同一目标第一路面交通参数,计算其目标路面交通状态属性对应的候选优化路面交通属性值,与目标第一路面交通参数对应的辅助第二路面交通参数中,目标路面交通状态属性对应的目标路面交通属性值之间的第二匹配度;根据第二匹配度和第三置信度,计算目标第一路面交通参数中各目标路面交通状态属性对应的候选优化路面交通属性值与目标路面交通属性值之间的路面交通属性损失;对各目标路面交通状态属性对应的路面交通属性损失进行标准化输出,得到目标第一路面交通参数的预测目标第二路面交通参数与对应的各辅助第二路面交通参数之间的第三loss函数结果。
91.其中,目标路面交通状态属性对应有多个候选优化路面交通属性值,第二匹配度包括目标路面交通状态属性对应的各个候选优化路面交通属性值与对应的目标路面交通属性值之间的匹配度。
92.其中,该第二匹配度具体可以基于向量距离来度量,该向量距离具体指候选优化路面交通属性值的路面交通属性线性表示和目标路面交通属性值的路面交通属性线性表示之间的向量距离。向量距离越大,第二匹配度越小;向量距离越小,第二匹配度越大。该向量距离具体可以是欧式距离,也可以是余弦距离等。
93.其中,对各目标路面交通状态属性对应的路面交通属性损失进行标准化输出,具体可以是将各目标路面交通状态属性对应的路面交通属性损失进行加权求和。
94.其中,第三loss函数结果的具体计算方法可以参考第二城市路网交通感知优化模型的训练中相关实施例(第二loss函数结果的计算)的描述,此处不再赘述。
95.由上可知,本实施例可以获取待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性;基于第一城市路网交通感知优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果;基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度;基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性;基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态。本技术实施例可以根据多个辅助第一路面交通参数,对第二城市路网交通感知优化模型进行训练,增加了所构造的虚拟北斗路面交通数据集的多样性,给第一城市路网交通感知优化模型的训练提供更加丰富的原始信息,进而提升了优化质量。
96.根据前面实施例所描述的方法,以下将以该根据人工智能的优化装置具体集成在服务器举例作进一步详细说明,该服务器具体可以是云服务器等。
97.本技术实施例提供一种基于北斗的城市大面积路网交通感知方法,该基于北斗的
城市大面积路网交通感知方法的具体流程可以如下:201、服务器接收终端发送的待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性。
98.202、服务器基于第一城市路网交通感知优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果。
99.本实施例中,第一城市路网交通感知优化模型和第二城市路网交通感知优化模型可以是任何神经网络机器优化(neural machine translation,nmt) 模型。比如,可以是根据循环神经网络(recurrentneural network,rnn)、卷积神经网络(convolution neural network,cnn)和自注意力(self-attention)的nmt模型,以及混合使用rnn、cnn和自注意力的nmt模型等。
100.其中,神经网络机器优化,它可以使用编码器将原始交控路况数据表示为一个向量序列,然后解码器根据原始向量表示和已经输出的感知结果信息生成后续的感知结果。
101.其中,第二城市路网交通感知优化模型是根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及对应的多个辅助第一路面交通参数,也即,第二城市路网交通感知优化模型是根据多个优化路面交通感知结果训练得到的。由于每个优化路面交通感知结果的感知区域和所处应用环境不同,因此,训练后的第二城市路网交通感知优化模型优化第二路面交通参数,可以更多场景和需求的交通路面感知。
102.203、服务器基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度。
103.204、服务器基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性。
104.205、服务器基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态。
105.206、服务器向终端发送目标路面交通状态。
106.其中,该第一城市路网交通感知优化模型和第二城市路网交通感知优化模型是已经训练好的,由于第二城市路网交通感知优化模型是根据多个优化路面交通感知结果训练得到的,因此基于第二城市路网交通感知优化模型构造的虚拟北斗路面交通数据集中的第一路面交通参数相对更具有多样性;第一城市路网交通感知优化模型是根据第二城市路网交通感知优化模型构造的虚拟北斗路面交通数据集训练得到,对于第一城市路网交通感知优化模型,可以增加虚拟北斗路面交通数据集中原始感知结果的多样性,从而基于更加丰富的原始信息,来增强第一城市路网交通感知优化模型的优化质量。
107.其中,终端在接收目标路面交通状态后,可以在电子设备的显示器上显示优化后的目标路面交通状态。
108.在一具体实施例中,以第一城市路网交通感知优化模型为正向城市路网交通感知优化模型,以第二城市路网交通感知优化模型为反向城市路网交通感知优化模型,正向城市路网交通感知优化模型将原始路面交通状态优化到目标路面交通状态,反向城市路网交通感知优化模型将目标路面交通状态优化到原始路面交通状态,正向城市路网交通感知优化模型和反向城市路网交通感知优化模型的具体训练过程如下所示:2001、获取路面交通状态训练数据(可以认为是前面实施例提及的第一实际北斗路面交通数据集),其具体包括原始路面交通状态a和目标路面交通状态b;2002、选择训练方向,可以选择增加正向城市路网交通感知优化模型的感知结果多样性的方案,也可以选择基于改进反向优化技术,来提高正向城市路网交通感知优化模型的优化质量的方案;2003、若步骤2002选择的是增加正向城市路网交通感知优化模型的感知结果多样性的方案,可以根据多样性驱动的训练目标(ddt)对正向城市路网交通感知优化模型进行训练,具体地,可以获取多样的目标端候选感知结果,目标端候选感知结果和目标路面交通状态b都可以作为原始路面交通状态a的更加精确的路面交通状态优化路面交通感知结果(可认为是前面实施例提及的辅助第二路面交通参数),根据更加精确的路面交通状态优化路面交通感知结果和原始路面交通状态a,对正向城市路网交通感知优化模型进行训练;2004、根据步骤2003的训练,调整正向城市路网交通感知优化模型的权值,以使优化后的预测目标第二路面交通参数与更加精确的路面交通状态优化路面交通感知结果之间的loss函数结果满足预设条件,得到训练好的正向城市路网交通感知优化模型m,正向城市路网交通感知优化模型m可以增加感知结果的多样性;2005、若步骤2002选择的是基于改进反向优化技术,来提高正向城市路网交通感知优化模型的优化质量的方案,可以先根据多样性驱动的训练目标对反向城市路网交通感知优化模型进行训练,具体地,可以获取多样的原始候选感知结果,原始候选感知结果和原始路面交通状态a都可以作为目标路面交通状态b的基于现有的交通感知策略确定的路面交通状态优化路面交通感知结果(可认为是前面实施例提及的辅助第一路面交通参数),根据基于现有的交通感知策略确定的路面交通状态优化路面交通感知结果和目标路面交通状态b,对反向城市路网交通感知优化模型进行训练;2006、根据步骤2005的训练,调整反向城市路网交通感知优化模型的权值,以使优化后的预测第一路面交通参数与基于现有的交通感知策略确定的路面交通状态优化路面交通感知结果之间的loss函数结果满足预设条件,得到训练好的反向城市路网交通感知优化模型;2007、获取模拟目标路面交通数据c;2008、根据步骤2006训练好的反向城市路网交通感知优化模型,对模拟目标路面交通数据c进行优化,得到伪原始路面交通状态d,伪原始路面交通状态d和模拟目标路面交通数据c构成虚拟北斗路面交通数据集,由于反向城市路网交通感知优化模型是根据多个基于现有的交通感知策略确定的路面交通状态优化路面交通感知结果进行训练的,因此可以增加所构造的伪原始路面交通状态d的多样性,提供更加丰富的原始信息;
2009、将虚拟北斗路面交通数据集与第一实际北斗路面交通数据集合并,得到正向城市路网交通感知优化模型的实际北斗路面交通数据集训练样本,其中包括原始路面交通状态(a+d)和目标路面交通状态(b+c);2010、可以将原始路面交通状态(a+d)作为正向城市路网交通感知优化模型的输入,得到优化后的预测第二路面交通参数,根据预测第二路面交通参数和对应的目标路面交通状态(b+c)之间的极大似然估计的交叉熵,对正向城市路网交通感知优化模型进行从基于现有的交通感知策略确定的路面交通状态到更加精确的路面交通状态的优化训练;2011、基于步骤2010的训练,调整正向城市路网交通感知优化模型的权值,以使极大似然估计的交叉熵满足预设条件,得到训练好的正向城市路网交通感知优化模型m1;由于反向城市路网交通感知优化模型具备更强的输出多样感知结果的能力,所以合并后的实际北斗路面交通数据集训练样本包含了更加交通路面感知信息,可以提升最终正向城市路网交通感知优化模型m1的优化质量。
109.可选的,一些实施例中,可以只对正向城市路网交通感知优化模型进行增加感知结果多样性的训练(参见步骤2001~步骤2004),也可以只基于改进反向优化技术,来增强正向城市路网交通感知优化模型的优化质量(参见步骤2001、步骤2002以及步骤2005~步骤2011)。
110.可选的,在另一些实施例中,正向城市路网交通感知优化模型m1可以是在步骤2004得到的正向城市路网交通感知优化模型m的基础上训练得到的,即对正向城市路网交通感知优化模型进行两次训练;具体地,可以对正向城市路网交通感知优化模型和反向城市路网交通感知优化模型进行增加感知结果多样性的训练,得到训练好的正向城市路网交通感知优化模型m和反向城市路网交通感知优化模型,再基于训练好的反向城市路网交通感知优化模型,获取虚拟北斗路面交通数据集,对正向城市路网交通感知优化模型m进行从基于现有的交通感知策略确定的路面交通状态到更加精确的路面交通状态的优化训练,从而得到正向城市路网交通感知优化模型m1。
111.在目前的相关技术中,城市路网交通感知优化模型的训练通常使用带有单个参考的路面交通状态训练数据库进行参数优化,这限制了资源的使用,并使生成的优化盲目且不合理地近似了该优化路面交通感知结果。
112.本技术实施例可以根据多样性驱动的训练目标,训练反向城市路网交通感知优化模型,以增加所构造预设路面交通数据训练集的原始感知结果多样性,从而基于丰富训练集中基于现有的交通感知策略确定的路面交通状态信息来增强正向城市路网交通感知优化模型,并与神经网络机器城市路网交通感知优化模型nmt的交叉熵损失结合,最终提升正向城市路网交通感知优化模型的优化质量。
113.本技术可用于根据任何深度学习框架(如tensorflow(一个根据数据流编程的符号数学系统)、pytorch等)所实现的任何神经网络机器优化系统(如rnnsearch(循环神经网络搜索)、transformer(变压器)等)。基于增强反向优化技术(back-translation),丰富基于现有的交通感知策略确定的路面交通状态的信息,从而提升正向城市路网交通感知优化模型的质量。
114.由上可知,本实施例可以基于服务器接收终端发送的待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性;基于第一城市路网交通感知
优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集训练得到,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果;服务器基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度;基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性;基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态;服务器向终端发送目标路面交通状态。本技术实施例可以根据多个辅助第一路面交通参数,对第二城市路网交通感知优化模型进行训练,增加了所构造的虚拟北斗路面交通数据集的多样性,给第一城市路网交通感知优化模型的训练提供更加丰富的原始信息,进而提升了优化质量。
115.请结合参阅图3,本发明实施例提供一种基于北斗的城市大面积路网交通感知系统110,包括:获取模块1101,用于获取待感知的初始路面交通状态,初始路面交通状态包括至少一个初始路面交通状态属性;基于第一城市路网交通感知优化模型,获取初始路面交通状态中至少一个初始路面交通状态属性对应的路面交通属性线性表示,其中,第一城市路网交通感知优化模型是根据多个虚拟北斗路面交通数据集训练得到,虚拟北斗路面交通数据集包括第二路面交通参数,以及由第二城市路网交通感知优化模型对第二路面交通参数优化得到的第一路面交通参数,第二城市路网交通感知优化模型根据第二实际北斗路面交通数据集对预设第二城市路网交通感知优化模型的权值进行更替以构建,一个第二实际北斗路面交通数据集中包括一个目标第二路面交通参数以及多个辅助第一路面交通参数,辅助第一路面交通参数为目标第二路面交通参数的优化路面交通感知结果,预设第二城市路网交通感知优化模型的权值是根据预设第二城市路网交通感知优化模型对目标第二路面交通参数的优化结果,与目标第二路面交通参数对应的各辅助第一路面交通参数之间的第二loss函数结果来确定的。
116.输出模块1102,用于基于第一城市路网交通感知优化模型,根据路面交通属性线性表示,输出各初始路面交通状态属性对应的至少两个待定对比路面交通状态属性,以及各初始路面交通状态属性优化为对应的待定对比路面交通状态属性的第一置信度。
117.优化模块1103,用于基于第一城市路网交通感知优化模型,根据第一置信度,从待定对比路面交通状态属性中,确定各初始路面交通状态属性对应的目标对比路面交通状态属性;基于第一城市路网交通感知优化模型,对各个目标对比路面交通状态属性进行标准化输出,得到初始路面交通状态优化后的目标路面交通状态。
118.需要说明的是,前述基于北斗的城市大面积路网交通感知系统110的实现原理可以参考前述基于北斗的城市大面积路网交通感知方法的实现原理,在此不再赘述。应理解
以上装置的各个模块的划分仅仅是一种逻辑功能的划分,实际实现时可以全部或部分集成到一个物理实体上,也可以物理上分开。且这些模块可以全部以软件通过处理元件调用的形式实现;也可以全部以硬件的形式实现;还可以部分模块通过处理元件调用软件的形式实现,部分模块通过硬件的形式实现。例如,获取模块1101可以为单独设立的处理元件,也可以集成在上述装置的某一个芯片中实现,此外,也可以以程序代码的形式存储于上述装置的存储器中,由上述装置的某一个处理元件调用并执行以上获取模块1101的功能。其它模块的实现与之类似。此外这些模块全部或部分可以集成在一起,也可以独立实现。这里所描述的处理元件可以是一种集成电路,具有信号的处理能力。在实现过程中,上述方法的各步骤或以上各个模块可以通过处理器元件中的硬件的集成逻辑电路或者软件形式的指令完成。
119.本发明实施例提供一种计算机设备100,计算机设备100包括处理器及存储有计算机指令的非易失性存储器,计算机指令被处理器执行时,计算机设备100执行前述的基于北斗的城市大面积路网交通感知系统110。如图4所示,图4为本发明实施例提供的计算机设备100的结构框图。计算机设备100包括基于北斗的城市大面积路网交通感知系统110、存储器111、处理器112及通信单元113。
120.出于说明目的,前面的描述是参考具体实施例而进行的。但是,上述说明性论述并不打算穷举或将本公开局限于所公开的精确形式。根据上述教导,众多修改和变化都是可行的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1