5G基站天线射频SMP板对板转接器套管成型自动机的制作方法
5g基站天线射频smp板对板转接器套管成型自动机
技术领域
1.本发明涉及自动化生产领域,具体涉及一种5g基站天线射频smp板对板转接器套管成型自动机。
背景技术:
2.随着5g网络的全面铺开,建设5g基站所需的天线射频smp板对板转接器套管需求量猛增,现有的5g基站天线射频smp板对板转接器套管采用车床和铣床的加工方式,由于受到操作人员的限制,使得生产品质不稳定、整体生产效率低下且成本居高不下,从而严重影响5g产品的竞争力,进而无法满足5g市场需求。
技术实现要素:
3.本发明的目的在于提供一种5g基站天线射频smp板对板转接器套管成型自动机,旨在解决现有技术中存在的生产品质不稳定、整体生产效率低下且成本居高不下的问题。
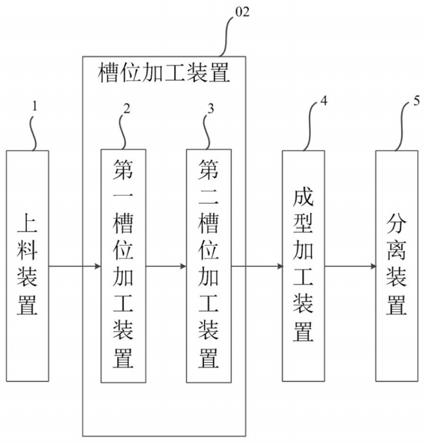
4.本发明是这样实现的,本发明5g基站天线射频smp板对板转接器套管成型自动机所采用的技术方案是:5g基站天线射频smp板对板转接器套管成型自动机,包括:上料装置,所述上料装置将用于生产天线射频smp板对板转接器套管的物料装入pet带开设的通孔中,所述通孔为多个且所述通孔之间具有一定间距;槽位加工装置,所述槽位加工装置对装在所述通孔的所述物料的两端进行切槽,以使所述物料的两端形成具有u形开口的槽位;成型加工装置,所述成型加工装置对装在所述通孔的具有所述槽位的所述物料的两端进行加工,以使所述物料的两端向外侧的边沿形成环状凸起,从而使所述物料成型为所述天线射频smp板对板转接器套管;分离装置,所述分离装置将装在所述通孔的所述天线射频smp板对板转接器套管,从所述通孔中分离出来。
5.进一步地,所述上料装置包括送料机构和进料机构,所述送料机构用于输送所述pet带至所述进料机构,所述进料机构用于将所述物料装入所述通孔中。
6.进一步地,所述槽位加工装置包括第一槽位加工装置和第二槽位加工装置,所述第一端槽位加工装置将装在所述通孔的所述物料的一端加工形成所述槽位,所述第二端槽位加工装置将装在所述通孔的所述物料的另一端加工形成所述槽位。
7.进一步地,所述第一槽位加工装置包括依照所述pet带前进方向排列的第一切槽机构、第一旋转机构、第二切槽机构以及第一拉带机构,所述第一切槽机构将装在所述通孔的所述物料的朝上一端切出所述槽位,所述第一旋转机构将所述第一切槽机构加工后的装在所述通孔的所述物料水平旋转90度,所述第二切槽机构将所述第一旋转机构水平旋转90度后的装在所述通孔的所述物料的朝上一端切出所述槽位,所述第一拉带机构拉动所述pet带以使所述第二切槽机构加工后的装在所述通孔的所述物料离开所述第一槽位加工装置。
8.进一步地,所述第二槽位加工装置包括依照所述pet带前进方向排列的第三切槽机构、第二旋转机构、第四切槽机构以及第二拉带机构,首先将离开所述第一槽位加工装置
的所述 pet带翻转180度,以使装在所述通孔的所述物料的另一端朝上,然后所述第三切槽机构将装在所述通孔的所述物料的朝上一端切出所述槽位,所述第二旋转机构将所述第三切槽机构加工后的装在所述通孔的所述物料水平旋转90度,所述第四切槽机构将所述第二旋转机构水平旋转90度后的装在所述通孔的所述物料的朝上一端切出所述槽位,所述第二拉带机构拉动所述pet带以使所述第四切槽机构加工后的装在所述通孔的所述物料离开所述第二槽位加工装置。
9.进一步地,所述成型加工装置包括依照所述pet带前进方向排列的第一成型机构、第二成型机构以及第三拉带机构,所述第一成型机构和所述第二成型机构对装在所述通孔的具有所述槽位的所述物料的朝向外侧的两端进行加工,以使具有所述槽位的所述物料朝向外侧的两端边沿形成环状凸起,从而使具有所述槽位的所述物料成型为所述天线射频smp板对板转接器套管,所述第三拉带机构拉动所述pet带以使装在所述通孔的所述天线射频smp板对板转接器套管离开所述成型加工装置。
10.进一步地,所述分离装置包括依照所述pet带前进方向排列的推带机构和分离机构,所述推带机构用于将离开所述成型加工装置的所述pet带推进至所述分离机构,所述分离机构将装在所述通孔的所述天线射频smp板对板转接器套管,从所述通孔中分离出来。
11.进一步地,所述pet带按照固定步距移动以便控制及调节加工速度;所述槽位为八个,其中,四个所述槽位平均分布于所述物料的一端,四个所述槽位平均分布于所述物料的另一端;所述第一成型机构和所述第二成型机构在加工成型所述环状凸起时,采用四向同步同时动作,以使所述环状凸起的尺寸稳定且表面圆滑。
12.具体地,所述通孔开设于所述pet带的中心位置,所述通孔为不规则圆形。
13.与现有技术相比,本发明提供的5g基站天线射频smp板对板转接器套管成型自动机,采用自动化气动方式,首先,上料装置将用于加工smp板对板转接器套管的物料装入pet 带设有的通孔中,接着,槽位加工装置对物料的两端进行加工,使物料的两端形成具有u形开口的槽位,接着,成型加工装置对物料的两端进行成型,以使物料朝向外侧的两端边沿形成环状凸起,从而使物料成型为smp板对板转接器套管,最后,分离装置将成型的smp板对板转接器套管从通孔中分离出来,整个加工过程无需人工干预,从而解决了现有技术中因人工参与造成的生产品质不稳定、整体生产效率低下且成本居高不下的问题;
14.此外,本发明提供的5g基站天线射频smp板对板转接器套管成型自动机,采用pet带用于物料输送,由于pet带价格低廉易加工易采购,不受成本和技术的限制;
15.此外,本发明提供的5g基站天线射频smp板对板转接器套管成型自动机,利用pet带的韧性,保证了对于物料的夹持力且不会损伤物料的表面,解决了细长产品在自动加工过程中不易输送、不利于机构定位的弊端;
16.此外,本发明提供的5g基站天线射频smp板对板转接器套管成型自动机,利用pet带的韧性保持力,通过旋转部对物料进行各种角度的旋转,从而实现对物料进行各种角度的加工;
17.此外,本发明提供的5g基站天线射频smp板对板转接器套管成型自动机,利用pet带可以加工为几百米的长度优势,整个自动化机采用平面布局,能够随时增加制造工艺,保证了加工装置的灵活性和易维护性。
附图说明
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的整体结构框图。
20.图2是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的开设有通孔的pet带示意图。
21.图3是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的物料装入pet带开设的通孔的示意图。
22.图4是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的一端具有槽位的物料示意图。
23.图5是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的两端具有槽位的物料示意图。
24.图6是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的天线射频smp板对板转接器套管示意图。
25.图7是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的上料装置示意图。
26.图8是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的上料装置另一方向示意图。
27.图9是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的上料装置主视图。
28.图10是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的第一槽位加工装置示意图。
29.图11是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的第二槽位加工装置示意图。
30.图12是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的切槽机构示意图。
31.图13是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的切槽机构另一方向示意图。
32.图14是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的旋转机构示意图。
33.图15是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的旋转机构主视图。
34.图16是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的旋转机构的第一夹持部的分解示意图。
35.图17是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的旋转机构的第二夹持部的分解示意图。
36.图18是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的旋转机构的旋转件示意图。
37.图19本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的旋转机构的旋转件仰视图。
38.图20是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的拉带机构示意图。
39.图21是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的拉带机构分解示意图。
40.图22是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的成型装置示意图。
41.图23是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的成型机构示意图。
42.图24是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的成型机构分解示意图。
43.图25是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的第三拉带机构示意图。
44.图26是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的第三拉带机构分解图。
45.图27是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的分离装置示意图。
46.图28是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的推带机构示意图。
47.图29是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的分离机构示意图。
48.图30是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的分离机构的分离部示意图。
49.图31是本发明实施例提供的5g基站天线射频smp板对板转接器套管成型自动机的分离机构的分离部分解示意图。
具体实施方式
50.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
51.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,
因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
52.以下结合附图与具体实施例,对本发明的技术方案做详细的说明。
53.参照图1至图31所示,为本发明提供的较佳实施例。
54.5g基站天线射频smp板对板转接器套管成型自动机,包括上料装置1,上料装置1将用于生产smp板对板转接器套管23的物料20装入pet带10开设的通孔11中,通孔11为多个且通孔11之间具有一定间距;槽位加工装置02,槽位加工装置02对装在通孔11的物料20的两端进行切槽,以使物料20的两端形成具有u形开口的槽位201;成型加工装置4,成型加工装置4对装在通孔11的具有槽位201的物料20的两端进行加工,以使物料20的两端朝向外侧边沿形成环状凸起202,从而使物料20成型为天线射频smp板对板转接器套管 23;分离装置5,分离装置5将装在通孔11的天线射频smp板对板转接器套管23,从通孔 11中分离出来。
55.上述提供的5g基站天线射频smp板对板转接器套管成型自动机,预先采用冲压方式对 pet带10的中心进行加工,使pet带10的中心按照一定间距分布通孔11,通孔11为非完整圆形状,通孔11的尺寸按照物料20的尺寸加工,以便使物料20装入通孔11中而不会掉出,加工后的pet带10如图2所示;优选地,物料20为细长圆管;首先,上料装置1将物料20装入pet带10设有的通孔11中,物料20装入pet10如图3所示;接着,槽位加工装置02对物料20的两端进行加工,使物料20的两端形成具有u形开口的槽位201,这样,物料20就被加工成为两端具有槽位的物料22,两端具有槽位的物料22如图5所示;接着,成型加工装置4对两端具有槽位的物料22的两端进行成型,以使两端具有槽位的物料22朝向外侧的两端边沿形成环状凸起202,从而使两端具有槽位的物料22成型为天线射频smp板对板转接器套管23,天线射频smp板对板转接器套管23如图6所示;最后,分离装置5将成型的天线射频smp板对板转接器套管23从通孔11中分离出来。整个加工过程无需人工干预,从而解决了现有技术中因人工参与造成的smp板对板转接器套管生产品质不稳定、整体生产效率低下且成本居高不下的问题。
56.参照图7至图9,上料装置1包括固定安装于第一底座100上面的送料机构和进料机构,所述送料机构用于输送pet带10至所述进料机构,所述进料机构用于将物料20装入通孔11 中;所述送料机构包括成型机构第一固定板412101、第一移动块102、第一定位块1021、第一气缸1022、第二气缸1024以及导轨1023;成型机构第一固定板412101和导轨1023位置相对,第一移动块102底部嵌于导轨1023上面,成型机构第一固定板412101用于挂载pet 带10,第一气缸1022拉动第一移动块102沿导轨1023往复运动,第一定位块1021嵌入第一移动块102且第一定位块1021的两端分别露出于第一移动块102外,第二气缸1024推动第一定位块1021的一端以使第一定位块1021的另一端向前运动撞击成型机构第一固定板 412101,从而推动pet带10向前运动至所述进料机构。
57.所述进料机构包括第一单杆气缸104、第一固定座1041、第二移动块1042、第二单杆气缸105、第三移动块1051、推块1052、推料杆1053、第二固定座1054、第三固定座1055、放料区1056以及轨道1057;第三固定座1055与成型机构第一固定板412101位置相邻,以使pet带10向前运动至第三固定座1055的端面;第三固定座1055位于放料区1056的一面设有贯通的进料孔10551,放料区1056用于堆放物料20,第一单杆气缸104由第一固定座 1041固定,第一单杆气缸104向前运动推动第二移动块1042,以使放料区1056不断振动,从而带动物料
20振动;第三移动块1051一端嵌有推料杆1053,第三移动块1051另一端嵌有推块1052,固定于第二固定座1054的第二单杆气缸105向前运动推动推块1052,以使第三移动块1051沿着轨道1057向前运动,从而使得推料杆1053将物料20推进进料孔10551 中并从进料孔10551中穿出,以使物料20进入pet带10设有的通孔11中。
58.作为上料装置1的一种实施方式,所述送料机构还包括第一固定块103、第二定位块1031 以及第三气缸1032,第二定位块1031嵌入第一固定块103且第二定位块1031的两端分别露出于第一固定块103外,第三气缸1032推动第二定位块1031向前运动撞击位于第三固定座 1055端面的pet带10,从而起到控制pet带10运动时间的作用;第一气缸1022的一端设有连动杆10221,连动杆10221的另一端固定于第一移动块102的一面,以使第一气缸1022 通过连动杆10221拉动第一移动块102沿导轨1023往复运动;第二单杆气缸105设有第一磁性开关1059和第二磁性开关1060,第一磁性开关1059套设于第二单杆气缸105与第二固定座1054交界处的一端,第二磁性开关1060套设于第二单杆气缸105的顶端,第一磁性开关 1059和第二磁性开关1060用于感应第二单杆气缸105的工作状态,第二单杆气缸105的控制电路根据接收到的第一磁性开关1059和第二磁性开关1060的信号,以使第二单杆气缸105 做出下一步动作;所述进料机构还包括第三固定块1063,第三固定块1063位于放料区1056 和导轨1023交界处,第三固定块1063设有开口向上的沟槽,所述沟槽用于容纳推料杆1053 的端部以起到对推料杆1053定位的作用;所述进料机构还包括第二固定块1050和横杆1062,第二固定块1050和横杆1062分别沿轨道1057布置,以起到对轨道1057的定位作用;第一底座100下面设有活动支架1061和第四气缸1033,活动支架1061呈u形,所述u形开口的一端与第一底座100固定连接,所述u形开口的另一端位于嵌入第一底座100的直线振料器1058底部,用于承托直线振料器1058,第四气缸1033位于所述u形开口的底部,第四气缸1033通过气动方式调节活动支架1061高度,以实现对第一底座100的高度进行调节;所述进料机构还包括直线振料器1058,直线振料器1058位于轨道1057一侧,直线振料器1058 用于将放料区1056内的物料20自动有序定向排列整齐。
59.上料装置1的工作流程如下所述:物料20堆放于放料区1056,由第一固定座1041固定的第一单杆气缸104向前运动推动第二移动块1042,从而使放料区1056不断振动,物料20 通过直线振料器1058的振动在放料区1056内有序定向排列整齐,从而为推料杆1053将物料 20推入进料孔10551做好了准备;第三移动块1051一端嵌有推料杆1053,另一端嵌有推块 1052,固定于第二固定座1054的第二单杆气缸105向前运动推动推块1052从而使得第三移动块1051沿着轨道1057向前运动,推料杆1053将放料区1056内的物料20推进第三固定座 1055开设的进料孔10551中;pet带10挂载于成型机构第一固定板412101上面,第一气缸 1022带动第一移动块102沿着导轨1023往复移动,第二气缸1024推动第一定位块1021向前运动撞击成型机构第一固定板412101,从而推动pet带10向第三固定座1055方向运动,当pet带10运动到进料孔10551的位置时,物料20就装入通孔11中,第三气缸1032推动第二定位块1031向前运动撞击pet带10,从而起到控制pet带10的运动时间的作用。这样,所述送料机构和所述进料机构就将物料20依次装进pet带10的通孔11中,从而为后续对物料20进行加工做好了准备。
60.具体地,槽位加工装置02包括第一槽位加工装置2和第二槽位加工装置3,第一槽位加工装置2将装入通孔11的物料20的一端加工形成四个槽位201,这样,经过第一槽位加
工装置2加工之后,物料20成型为一端具有槽位的物料21,一端具有槽位的物料21如图4所示;接着,第二槽位加工装置3将装入通孔11的物料21的另一端加工形成四个槽位201,这样,经过第二槽位加工装置3加工之后,一端具有槽位的物料21成型为两端具有槽位的物料22,从而为后续对两端具有槽位的物料22的两端进行成型加工做好了准备。
61.参照图10,第一槽位加工装置2包括依照pet带10前进方向排列的第一切槽机构201、第一旋转机构203、第二切槽机构202以及第一拉带机构204,第一切槽机构201将装在通孔11的物料20的朝上一端切出两个槽位201,这两个槽位201处于同一方向;第一旋转机构 203将第一切槽机构201加工后的装在通孔11的物料20水平旋转90度,第二切槽机构202 将第一旋转机构203水平旋转90度后的装在通孔11的物料20的朝上一端切出两个槽位201,这两个槽位201处于同一方向;这样,第一切槽机构201和第二切槽机构202就将物料20朝上的一端切出四个槽位201,至此,物料20被第一切槽机构201和第二切槽机构202加工成为一端具有槽位的物料21;之后,第一拉带机构204拉动pet带10以使第二切槽机构202 加工后的装在通孔11的物料21离开第一槽位加工装置2。
62.作为第一槽位加工装置2的一种实施方式,第一槽位加工装置2设有第二底座200,第二底座200上面设有第一输料台2010,第一输料台2010从第一切槽机构201和第二切槽机构202下面穿过,第一输料台2010设有纵向开口朝上的第一输料台u形槽20101,一方面使位于pet带10平面下面的物料20的下半部通过,另一方向对位于pet带10平面上面的物料20的上半部起到定位的作用,以便于第一切槽机构201和第二切槽机构202对物料20进行加工;优选地,在第一输料台u形槽20101的开口的两边还设有第一定位板20102和第二定位板20103,对位于pet带10平面上面的物料20的上半部起到进一步定位的作用;优选地,第一切槽机构201、第一旋转机构203、第二切槽机构202以及第一拉带机构204通过定位块01固定于第二底座200上面;第二底座200下面还设有第一活动支撑架2011、第二活动支撑架2012、第三活动支撑架2013以及第四活动支撑架2014;第二底座200下面还设有第五气缸2015、第五气缸固定座20151以及第五气缸导杆20152;第五气缸2015带动与第五气缸2015相连的第五气缸固定座20151沿第五气缸导杆20152往复运动,以使第一活动支撑架2011、第二活动支撑架2012、第三活动支撑架2013以及第四活动支撑架2014升高或降低,从而对第二底座200的高度进行调节。
63.参照图11,第二槽位加工装置3包括依照pet带10前进方向排列的第三切槽机构301、第二旋转机构303、第四切槽机构302以及第二拉带机构304,首先将离开第一槽位加工装置的pet带10翻转180度,以使装在通孔11的一端具有槽位的物料21的另一端朝上,第三切槽机构301将装在通孔11的一端具有槽位的物料21的朝上一端切出两个槽位201,这两个槽位201处于同一方向;第二旋转机构303将第三切槽机构301加工后的装在通孔11的一端具有槽位的物料21水平旋转90度,第四切槽机构302将第一旋转机构203水平旋转90度后的装在通孔11的一端具有槽位的物料21的朝上一端切出两个槽位201,这两个槽位201 处于同一方向;这样,第三切槽机构301和第四切槽机构302就将一端具有槽位的物料21朝上的一端切出四个槽位201,至此,一端具有槽位的物料21被第三切槽机构301和第四切槽机构302加工成为两端具有槽位的物料22;之后,第二拉带机构304拉动pet带10以使第四切槽机构302加工后的装在通孔11的两端具有槽位的物料22离开第二槽位加工装置3。
64.作为第二槽位加工装置3的一种实施方式,第二槽位加工装置3设有第三底座300,
第三底座300上面设有第二输料台3010,第二输料台3010从第三切槽机构301和第四切槽机构302下部穿过,第二输料台3010设有纵向开口朝上的第二输料台u形槽30101,一方面使位于pet带10平面下面的一端具有槽位的物料21的下半部通过,另一方向对位于pet带 10平面上面的一端具有槽位的物料21的上半部起到定位的作用,以便于第三切槽机构301 和第二拉带机构304对一端具有槽位的物料21进行加工,优选地,在第二输料台u形槽30101 的开口的两边还设有第三定位板30102和第四定位板30103,对位于pet带10平面上面的一端具有槽位的物料21的上半部起到进一步定位的作用。第三底座300下面还设有第五活动支撑架3011、第六活动支撑架3012、第七活动支撑架3013以及第八活动支撑架3014;第三底座300下面还设有第六气缸3015、第六气缸旋转机构固定座23130151以及第六气缸导杆 30152;第六气缸3015带动与第六气缸3015相连的第六气缸旋转机构固定座23130151沿第六气缸导杆30152往复运动,以使第五活动支撑架3011、第六活动支撑架3012、第七活动支撑架3013以及第八活动支撑架3014升高或降低,从而对第三底座300的高度进行调节。
65.具体地,第一切槽机构201、第二切槽机构202、第三切槽机构301以及第四切槽机构 302的工作原理相同;第一旋转机构203和第二旋转机构303的工作原理相同;第一拉带机构204和第二拉带机构304的工作原理相同。
66.参照图12至图13,由于第一切槽机构201、第二切槽机构202、第三切槽机构301以及第四切槽机构302的工作原理相同,为了更清楚的表述第一切槽机构201、第二切槽机构202、第三切槽机构301以及第四切槽机构302的工作原理,第一切槽机构201、第二切槽机构202、第三切槽机构301以及第四切槽机构302用切槽机构230表示,切槽机构230包括位于切槽机构气缸固定座2303上面的切槽机构第一气缸2301和切槽机构第二气缸2302,切槽机构气缸固定座2303与切槽机构第一导杆2304、切槽机构第二导杆2305、切槽机构第三导杆2306 以及切槽机构第四导杆2307的一端相连,切槽机构第一气缸连接块2312和切槽机构第二气缸连接块2313位于切槽机构气缸固定座2303下方,其中,切槽机构第一气缸连接块2312与切槽机构第一气缸2301位置相对,切槽机构第二气缸连接块2313与切槽机构第二气缸2302 位置相对;切槽机构气缸固定座2303下方还有切槽机构第一固定块2308、切槽机构第二固定块2309、切槽机构第一移动块2314以及切槽机构第一加工块2315,其中,切槽机构第一固定块2308和切槽机构第二固定块2309位置相对,切槽机构第一固定块2308和切槽机构第二固定块2309相对的一面设有沟槽,用于放置切槽机构第一加工块2315,切槽机构第一加工块2315下面的空间用于放置第一输料台2010或第二输料台3010;切槽机构第一加工块 2315的上方与切槽机构第一移动块2314相接,切槽机构第一移动块2314上方与切槽机构第一气缸连接块2312下方相接;切槽机构气缸固定座2303下方还有切槽机构第三固定块2310、切槽机构第四固定块2311、切槽机构第二移动块2316以及切槽机构第二加工块2317,其中,切槽机构第三固定块2310和切槽机构第四固定块2311位置相对,切槽机构第三固定块2310 和切槽机构第四固定块2311相对的一面设有沟槽,用于放置切槽机构第二加工块2317,切槽机构第二加工块2317下面的空间用于放置第一输料台2010或第二输料台3010;切槽机构第二加工块2317的上方与切槽机构第二移动块2316相接,切槽机构第二移动块2316上方与切槽机构第二气缸连接块2313下方相接;切槽机构第一气缸2301和切槽机构第二气缸2302 带动与切槽机构第一气缸2301连接接触的切槽机构气缸固定座2303沿切槽机构第一导杆 2304、切槽机构第二导杆2305、切槽机构第三导杆2306以及切槽机构第四导杆
2307的延伸方向往复运动,切槽机构气缸固定座2303作用于切槽机构第一气缸连接块2312和切槽机构第二气缸连接块2313,切槽机构第一气缸连接块2312作用于切槽机构第一移动块2314,再通过切槽机构第一移动块2314作用于切槽机构第一加工块2315,切槽机构第一加工块2315 与物料20或一端具有槽位的物料21相接的一面设有模具,所述模具借助切槽机构第一加工块2315向下的作用力在物料20的一端或一端具有槽位的物料21的另一端切出一个槽位201;与此同时,切槽机构第二气缸连接块2313作用于切槽机构第二移动块2316,再通过切槽机构第二移动块2316作用于切槽机构第二加工块2317,切槽机构第二加工块2317与物料20 或一端具有槽位的物料21相接的一面设有模具,所述模具借助切槽机构第二加工块2317向下的作用力在物料20的一端或一端具有槽位的物料21的另一端切出另一个槽位201。
67.参照图14至图15,由于第一旋转机构203和第二旋转机构303的工作原理相同,为了更清楚的表述第一旋转机构203和第二旋转机构303的工作原理,第一旋转机构203和第二旋转机构303用旋转机构231表示,旋转机构231包括旋转机构固定座23130、夹持机构以及旋转装置;所述夹持机构固定于旋转机构固定座23130上面,所述旋转装置位于所述夹持机构上方,所述旋转装置与所述夹持机构通过导向柱相连,所述夹持机构将用于生产天线射频smp板对板转接器套管的物料20夹紧,以使所述旋转装置对物料20进行水平旋转;所述导向柱包括旋转机构第一导向柱231103和旋转机构第二导向柱231104,旋转机构第一导向柱231103和旋转机构第二导向柱231104位于旋转机构固定座23130的两侧。
68.作为旋转机构231的一种实施方式,所述旋转装置包括旋转机构气缸231100、旋转机构气缸固定板231101、旋转机构连接块231102、旋转机构固定板231105、旋转机构第一定位块 231106、旋转机构第二定位块231107以及旋转部;旋转机构气缸231100嵌于旋转机构气缸固定板231101上面,旋转机构连接块231102位于旋转机构固定板231105上面;旋转机构第一定位块231106位于旋转机构固定板231105下方且嵌套于旋转机构第一导向柱231103外围,用于旋转机构第一导向柱231103的定位;旋转机构第二定位块231107位于旋转机构固定板 231105下方且嵌套于旋转机构第二导向柱231104外围,用于旋转机构第二导向柱231104的定位;所述旋转部位于旋转机构固定板231105下面,旋转机构气缸231100控制旋转机构连接块231102带动与旋转机构连接块231102接触的旋转机构固定板231105沿着旋转机构第一导向柱231103和旋转机构第二导向柱231104的延伸方向上下移动,从而推动所述旋转部向下运动时与物料20的顶部接触。所述旋转部包括旋转件231200、旋转机构第一固定块231201、旋转机构第二固定块231202、旋转机构第三固定块231203、旋转机构第四固定块231204、旋转机构第一导向块231205以及旋转机构第二导向块231206;旋转机构第一导向块231205 与旋转机构固定板231105下方相连,旋转机构第二导向块231206与旋转机构第一导向块 231205下方相连;旋转机构第一固定块231201、旋转机构第二固定块231202、旋转机构第三固定块231203以及旋转机构第四固定块231204的上方与旋转机构固定座23130相连,旋转机构第一固定块231201、旋转机构第二固定块231202、旋转机构第三固定块231203以及旋转机构第四固定块231204的一面分别嵌入旋转机构第一导向块231205的四面,以使旋转机构第一导向块231205固定;旋转件231200的上方嵌入旋转机构第二导向块231206的上方;旋转机构气缸231100推动所述旋转部运动时,旋转机构第一导向块231205推动旋转机构第二导向块231206,以使旋转机构第二导向块231206推动旋转件
231200向下运动时与物料20 的顶部接触。旋转机构231还包括旋转机构第三定位块231108和旋转机构第四定位块231109;旋转机构第三定位块231108嵌套于第二夹持件231401并且两侧与旋转机构固定座23130连接,用于对第二夹持件231401定位;旋转机构第四定位块231109嵌套于第一夹持件231301 并且两侧与旋转机构固定座23130连接,用于对第一夹持件231301定位。旋转机构固定座 23130设有开口朝上的u形槽,所述u形槽纵向延伸,以使物料20的底部通过旋转机构固定座23130。位于第一夹持件231301两侧的旋转机构第二定位板23142以及位于第二夹持件 231401两侧的旋转机构第一定位板23141,用于固定物料20的位置。
69.具体地,参照图16,所述第一夹持部包括第一夹持件231301、旋转机构第一单杆气缸 231302以及旋转机构第一单杆气缸固定板231303;第一夹持件231301的一端设有第一夹持端2313011,第一夹持端2313011具有u形开口,以便夹紧物料20;第一夹持件231301的另一端设有旋转机构第一安装孔2313012,第一夹持件231301通过旋转机构第一安装孔2313012 与旋转机构第一单杆气缸固定板231303设有的旋转机构第三安装孔2313014相连;旋转机构第一单杆气缸231302与旋转机构第一单杆气缸固定板231303设有的旋转机构第二安装孔 2313013相连,使得旋转机构第一单杆气缸231302通过旋转机构第一单杆气缸固定板231303 带动第一夹持件231301水平往复运动,从而使得第一夹持件231301对物料20依次进行夹紧。
70.具体地,参照图17,所述第二夹持部包括第二夹持件231401、旋转机构第二单杆气缸 231402以及旋转机构第二单杆气缸固定板231403;第二夹持件231401的一端设有上下排列的第二夹持端2314011和第三夹持端2314012,第二夹持端2314011和第三夹持端2314012 具有u形开口,以便夹紧物料20;第二夹持件231401的另一端设有旋转机构第四安装孔 2314013,第二夹持件231401通过旋转机构第四安装孔2314013与旋转机构第二单杆气缸固定板231403设有的旋转机构第五安装孔2314014相连;旋转机构第二单杆气缸231402与旋转机构第二单杆气缸固定板231403设有的旋转机构第六安装孔2314015相连,使得旋转机构第二单杆气缸231402通过旋转机构第二单杆气缸固定板231403带动第二夹持件231401水平往复运动,从而使得第二夹持件231401对物料20依次进行夹紧。
71.具体地,参照图18至图19,旋转件231200包括相连的头部2312011和端部2312012;头部2312011形成圆形旋转机构凹陷区23220111,以使旋转件231200通过旋转机构凹陷区 23220111嵌套于旋转机构第二导向块231206下方,且能自由转动;端部2312012具有u形槽,所述u形槽开口呈阶梯形,以使旋转件231200抓紧物料20的顶部从而带动物料20旋转。所述夹持机构包括第一夹持部和第二夹持部,所述第一夹持部和所述第二夹持部分别位于物料20两侧,所述第一夹持部与所述第二夹持部夹紧物料20以便于所述旋转部对物料20 进行水平旋转。
72.旋转机构231的工作流程如下所述:物料20运动至第一夹持端2313011、第二夹持端 2314011以及第三夹持端2314012的u形开口位置时,旋转机构第一单杆气缸231302带动旋转机构第一单杆气缸固定板231303水平向前运动,从而推动第一夹持件231301水平向前运动,以使第一夹持端2313011夹紧物料20外露于旋转机构固定座23130表面的部分,同时,旋转机构第二单杆气缸231402带动旋转机构第二单杆气缸固定板231403水平向前运动,从而推动第二夹持件231401水平向前运动,以使第二夹持端2314011和第三夹持端2314012夹
紧物料20外露于旋转机构固定座23130表面的部分;旋转机构气缸231100控制旋转机构连接块231102带动与旋转机构连接块231102接触的旋转机构固定板231105沿着旋转机构第一导向柱231103和旋转机构第二导向柱231104的延伸方向下移动,使得旋转机构第一导向块 231205推动旋转机构第二导向块231206,进而旋转机构第二导向块231206推动旋转件231200 向下运动与物料20的顶部接触,使得位于旋转件231200的端部2312012的所述u形槽与物料20的顶部u形槽开口相互咬合,接着旋转件231200水平旋转90度,从而带动物料20水平旋转90度;然后,旋转机构第一单杆气缸231302带动旋转机构第一单杆气缸固定板231303 水平向后运动,从而推动第一夹持件231301水平向后运动,以使第一夹持端2313011离开物料20,同时,旋转机构第二单杆气缸231402带动旋转机构第二单杆气缸固定板231403水平向后运动,从而推动第二夹持件231401水平向后运动,以使第二夹持端2314011和第三夹持端2314012离开物料20;旋转机构气缸231100控制旋转机构连接块231102带动与旋转机构连接块231102接触的旋转机构固定板231105沿着旋转机构第一导向柱231103和旋转机构第二导向柱231104的延伸方向上移动,使得旋转机构第一导向块231205带动旋转机构第二导向块231206,进而旋转机构第二导向块231206带动旋转件231200向上运动离开物料20的顶部;完成水平旋转的物料20继续向前运动进入下一个工序;所述夹持机构和所述旋转装置继续对需要加工的物料20进行水平旋转。
73.作为旋转机构231的一种实施方式,物料20还可以是一端具有槽位的物料21。
74.参照图20至图21,由于第一拉带机构204和第二拉带机构304的工作原理相同,为了更清楚的表述第一拉带机构204和第二拉带机构304的工作原理,第一拉带机构204和第二拉带机构304用拉带机构232表示,拉带机构232包括拉带机构底座23200、位于拉带机构底座23200上面两侧的拉带机构第一固定座23202和拉带机构第二固定座23203以及拉带机构单杆气缸23220,拉带机构底座23200设有向上开口的拉带机构底座u形槽23201,拉带机构底座u形槽23201纵向延伸,以使位于pet带10下方的物料下半部顺利通过;拉带机构单杆气缸23220位于拉带机构底座u形槽23201上方,拉带机构单杆气缸23220设有拉带机构单杆气缸固定座23223、拉带机构单杆气缸移动块23224,拉带机构单杆气缸23220控制拉带机构单杆气缸移动块23224带动与拉带机构单杆气缸23220连接接触的拉带机构单杆气缸固定座23223往复移动;拉带机构第一固定座23202和拉带机构第二固定座23203起到对拉带机构单杆气缸固定座23223和拉带机构单杆气缸移动块23224定位的作用。拉带机构232 还包括与拉带机构单杆气缸移动块23224相连的拉带机构移动块23204,位于拉带机构移动块23204两侧以限定拉带机构移动块23204左右移动的拉带机构第一定位板232021和拉带机构第二定位板232031,位于拉带机构移动块23204上面的对拉带机构移动块23204上下位移起到限定作用的拉带机构第一定位块23205;拉带机构232还包括拉带机构气缸23210和拉带机构气缸连接块23211;拉带机构移动块23204设有贯通的开口,拉带机构气缸连接块23211 与拉带机构移动块23204相接的一端为开口朝下的u形槽;当拉带机构气缸23210作用于拉带机构气缸连接块23211时,拉带机构气缸连接块23211与拉带机构移动块23204相接,该 u形槽正好嵌入拉带机构移动块23204贯通的开口内,该u形槽开口的宽度与pet带10的宽度相配,使得pet带10正好处于该u形槽开口内;拉带机构232还包括拉带机构第二定位块23206,拉带机构第二定位块23206位于拉带机构移动块23204与拉带机构底座23200 的端部交接处,对拉带机构移动块23204的前后移动起到限定作用;拉带机构232还包括位于
拉带机构单杆气缸23220一端的拉带机构第一磁性开关23221和位于拉带机构单杆气缸 23220与拉带机构单杆气缸固定座23223连接处的拉带机构第二磁性开关23222,拉带机构第一磁性开关23221和拉带机构第二磁性开关23222用于感应拉带机构单杆气缸23220的工作状态,拉带机构单杆气缸23220的控制电路根据接收到的拉带机构第一磁性开关23221和拉带机构第二磁性开关23222的信号,以使拉带机构单杆气缸23220做出向前或向后的动作;拉带机构移动块23204的底面设有纵向延伸的沟槽,以使一端具有槽位的物料21位于pet 带10上面的上半部顺利通过。
75.作为拉带机构232的一种实施方式,一端具有槽位的物料21还可以是两端具有槽位的物料22。
76.拉带机构232的工作流程如下所示:当pet带10向前运动至拉带机构底座23200,位于 pet带10的物料的下半部分进入拉带机构底座u形槽23201时,拉带机构气缸23210带动拉带机构气缸连接块23211向下作用于拉带机构移动块23204,使得拉带机构气缸连接块 23211向下开口的u形槽嵌入拉带机构移动块23204的贯通开口内,使得位于拉带机构移动块23204的贯通开口内的pet带10固定;与此同时,拉带机构单杆气缸23220的控制电路根据接收到的拉带机构第一磁性开关23221和拉带机构第二磁性开关23222的信号,以使拉带机构单杆气缸23220沿着与pet带10向前运动方向相同的方向运动,拉带机构单杆气缸 23220控制拉带机构单杆气缸移动块23224带动与拉带机构单杆气缸23220连接接触的拉带机构单杆气缸固定座23223沿着pet带10向前运动方向移动,从而带动与拉带机构单杆气缸移动块23224相连的拉带机构移动块23204沿着pet带10向前运动方向移动,这样就拉动位于拉带机构移动块23204的贯通开口内的pet带10沿着pet带10向前运动方向移动;之后,拉带机构气缸23210带动拉带机构气缸连接块23211向上作用使得拉带机构气缸连接块23211向下开口的u形槽离开拉带机构移动块23204的贯通开口内,拉带机构单杆气缸 23220的控制电路根据接收到的拉带机构第一磁性开关23221和拉带机构第二磁性开关23222 的信号,以使拉带机构单杆气缸23220沿着与pet带10向前运动方向相反的方向运动,拉带机构单杆气缸23220控制拉带机构单杆气缸移动块23224带动与拉带机构单杆气缸23220 连接接触的拉带机构单杆气缸固定座23223沿着pet带10向前运动方向相反的方向移动,从而带动与拉带机构单杆气缸移动块23224相连的拉带机构移动块23204回退至原来的位置,从而为下一次拉动pet带10向前运动做好了准备;这样,通过拉带机构气缸23210和拉带机构单杆气缸23220的往复运动,就实现了拉动pet带10不断向前运动。
77.参照图22,成型加工装置4包括固定于第四底座400上面的第一成型机构401、第二成型机构402以及第三拉带机构403,第一成型机构401、第二成型机构402以及第三拉带机构 403的顺序按照pet带10的前进方向排列;第一成型机构401和第二成型机构402对装在通孔11的两端具有槽位的物料22的朝向外侧的两端进行加工,以使两端具有槽位的物料22朝向外侧的两端边沿形成环状凸起,第一成型机构401和第二成型机构402对两端具有槽位的物料22进行两次相同加工的目的在于使得两端具有槽位的物料22的环状凸起打磨精细,从而使两端具有槽位的物料22成型为天线射频smp板对板转接器套管23;第三拉带机构403 拉动pet带10以使装在通孔11的天线射频smp板对板转接器套管23离开成型加工装置4,从而为天线射频smp板对板转接器套管23进入与pet带10分离的工序做好了准备。
78.作为成型加工装置4的一种实施方式,成型加工装置4还包括第三输料台41,用于
支撑第三输料台41的第一支柱4101、第二支柱4102以及第三支柱4103,第一成型机构401和第二成型机构402分别布置于第三输料台41一侧;第一支柱4101、第二支柱4102、第三支柱 4103以及第三拉带机构403通过定位块01固定于底座400上面。
79.作为成型加工装置4的一种实施方式,第一成型机构401和第二成型机构402的工作原理相同,为了更清楚地表述第一成型机构401和第二成型机构402的工作原理,第一成型机构401和第二成型机构402用成型机构412表示。
80.参照图23至图24,成型机构412包括动力部、杠杆以及成型部,所述杠杆连接所述动力部和所述成型部,将所述动力部产生的动力传递到所述成型部;所述成型部包括成型件 41222和对成型件41222限位的成型滑动件41223,成型件41222嵌于成型滑动件41223内,成型件41222设有模具,所述模具用于对两端具有槽位的物料22的端口进行成型,以使两端具有槽位的物料22的端口形成环状凸起。
81.作为成型机构412的一种实施方式,所述动力部包括成型机构第一气缸41211、成型机构第一传动杆412110、成型机构传动块412112、成型机构第二气缸41212、成型机构第二气缸固定块412121、成型机构第一位移拉块412122、成型机构第三气缸41213、成型机构第三气缸固定块412131、成型机构第二传动杆412133以及成型机构第二位移拉块412132;成型机构第一传动杆412110与成型机构第一气缸41211相接,成型机构第一气缸41211控制成型机构传动块412112以使成型机构第一气缸41211的动力沿着成型机构第一传动杆412110传递至所述成型部;成型机构第二气缸41212控制成型机构第一位移拉块412122带动与成型机构第二气缸41212连接接触的成型机构第二气缸固定块412121向前运动,以使成型机构第二气缸41212产生的动力传递至所述成型部;成型机构第三气缸41213控制成型机构第二位移拉块412132带动与成型机构第三气缸41213连接接触的成型机构第三气缸固定块412131向前运动,以使成型机构第三气缸41213产生的动力通过与成型机构第三气缸41213相接的成型机构第二传动杆412133传递至所述杠杆。所述杠杆包括第一成型杠杆41214,第一成型杠杆41214与成型机构第二传动杆412133连接的一端为u形开口,第一成型杠杆41214设有的轴承412141位于所述u形开口处,轴承412141与成型机构第二传动杆412133的连接处不断滑动使得第一成型杠杆41214上下左右移动,从而带动所述成型部做精密加工。所述杠杆还包括第二成型杠杆41215、第三成型杠杆41216以及第四成型杠杆41217,第二成型杠杆 41215和第三成型杠杆41216分别位于第一成型杠杆41214的两侧,第四成型杠杆41217位于第一成型杠杆41214的另一端,第二成型杠杆41215、第三成型杠杆41216和第四成型杠杆41217设有u形开口,第二成型杠杆41215、第三成型杠杆41216和第四成型杠杆41217 分别通过所述u形开口与第一成型杠杆41214连接在一起,从而对第一成型杠杆41214传递至所述成型部力度进行调节,以使所述成型部能够进行多力度加工。所述成型机构412还包括上盖板4123、上主板4124、下主板4125、后主板4126、成型机构第一固定板4121以及成型机构第二固定板4122;下主板4125位于底部,成型机构第一固定板4121和成型机构第二固定板4122位于下主板4125的两侧,上盖板4123连接成型机构第一固定板4121和成型机构第二固定板4122的顶端,所述杠杆位于下主板4125、上盖板4123、成型机构第一固定板 4121以及成型机构第二固定板4122围合的空腔内;后主板4126位于所述空腔开口的一面,用于隔离所述动力部,后主板4126的四周分别与上盖板4123、成型机构第一固定板4121、成型机构第二固定板4122以及下主板4125的一侧相连;上主板4124位于所述空腔开
口的另一面,用于嵌套所述成型部,上主板4124的四周分别与上盖板4123、成型机构第一固定板 4121、成型机构第二固定板4122以及下主板4125的一侧相连。具体地,上主板4124朝向外的一面设有沟槽,所述沟槽为十字形分别沿纵向及横向延伸,成型滑动件41223嵌于所述沟槽内,所述沟槽设有贯通的开口,以使所述杠杆的力作用于成型件41222从而带动所述模具对两端具有槽位的物料22进行加工。具体地,所述成型部还包括滑动件盖板,所述滑动件盖板沿所述沟槽的周边布置,所述滑动件盖板用于对成型滑动件41223定位。所述滑动件盖板包括第一滑动件412211、第二滑动件412212、第三滑动件412213、第四滑动件412214、第五滑动件412215、第六滑动件412216、第七滑动件412217以及第八滑动件412218,第二滑动件412212的一侧与第三滑动件412213的一侧相接,第四滑动件412214的一侧与第五滑动件412215的一侧相接,第六滑动件412216的一侧与第七滑动件412217的一侧相接,第八滑动件412218的一侧与第一滑动件412211的一侧相接。成型机构412还包括第一调整块41251,第一调整块41251位于上主板4124的下方与下主板4125的底部的一侧相接,第一调整块 41251用于调整上主板4124与下主板4125相接的位置,以使上主板4124定位准确。
82.作为成型机构412的一种实施方式,成型机构412还包括第二调整块41252,第二调整块41252位于成型机构第二固定板4122的下方与下主板4125的底部的一侧相接,第二调整块41252用于调整成型机构第二固定板4122与下主板4125相接的位置,以使成型机构第二固定板4122定位准确。作为成型机构412的另一种实施方式,第二调整块41252为两块,其中一块位于成型机构第二固定板4122的下方与下主板4125的底部的一侧相接,第二调整块 41252用于调整成型机构第二固定板4122与下主板4125相接的位置,以使成型机构第二固定板4122定位准确;另一块位于成型机构第一固定板4121的下方与下主板4125的底部的一侧相接,第二调整块41252用于调整成型机构第一固定板4121与下主板4125相接的位置,以使成型机构第一固定板4121定位准确。
83.作为成型机构412的一种实施方式,所述成型机构还包括滑动盖板41253和行程调节块 41254,滑动盖板41253和行程调节块41254位于成型机构第二固定板4122与下主板4125相交的一侧,用于调整及固定成型机构第二固定板4122在下主板4125上面的位置。作为成型机构412的另一种实施方式,滑动盖板41253和行程调节块41254各为2块,滑动盖板41253 和行程调节块41254的另一块位于成型机构第一固定板4121与下主板4125相交的一侧,用于调整及固定成型机构第一固定板4121在下主板4125上面的位置。
84.参照图25至图26,第三拉带机构403包括第三拉带机构固定柜40301、位于第三拉带机构固定柜40301设有的沟槽的两侧的第三拉带机构第一固定板40302和第三拉带机构第二固定板40303以及第三拉带机构单杆气缸40320,所述沟槽横向延伸,所述沟槽的底部设有开口向外的u形槽,以使位于pet带10一面的天线射频smp板对板转接器套管23的部分顺利通过;第三拉带机构单杆气缸40320位于第三拉带机构固定柜40301的一侧,第三拉带机构单杆气缸40320设有第三拉带机构单杆气缸固定座40323、第三拉带机构单杆气缸移动块 40324,第三拉带机构单杆气缸40320控制第三拉带机构单杆气缸移动块40324带动与第三拉带机构单杆气缸40320连接接触的第三拉带机构单杆气缸固定座40323往复移动;第三拉带机构第一固定板40302和第三拉带机构第二固定板40303起到对第三拉带机构单杆气缸固定座40323和第三拉带机构单杆气缸移动块40324定位的作用。
85.作为第三拉带机构403的一种实施方式,第三拉带机构403还包括与第三拉带机构
单杆气缸移动块40324相连的第三拉带机构移动块40304,位于第三拉带机构移动块40304两侧以限定第三拉带机构移动块40304上下移动的第三拉带机构第一固定块403091和第三拉带机构第二固定块403092,位于第三拉带机构移动块40304上面的对第三拉带机构移动块40304 左右位移起到限定作用的第三拉带机构第一定位块40305;第三拉带机构403还包括第三拉带机构气缸40310和第三拉带机构气缸连接块40311;第三拉带机构移动块40304设有贯通的开口,第三拉带机构气缸连接块40311与第三拉带机构移动块40304相接的一端为开口朝外的u形槽;当第三拉带机构气缸40310作用于第三拉带机构气缸连接块40311时,第三拉带机构气缸连接块40311与第三拉带机构移动块40304相接,该u形槽正好嵌入第三拉带机构移动块40304贯通的开口内,该u形槽开口的宽度与pet带10的宽度相配,使得pet带10正好处于该u形槽开口内;第三拉带机构403还包括第三拉带机构第二定位块40306,第三拉带机构第二定位块40306位于第三拉带机构移动块40304与第三拉带机构固定柜40301 的端部交接处,对第三拉带机构移动块40304与pet带10前进方向相反的方向移动起到限定作用;第三拉带机构403还包括位于第三拉带机构单杆气缸40320一端的第三拉带机构第一磁性开关40321和位于第三拉带机构单杆气缸40320与第三拉带机构单杆气缸固定座40323 连接处的第三拉带机构第二磁性开关40322,第三拉带机构第一磁性开关40321和第三拉带机构第二磁性开关40322用于感应第三拉带机构单杆气缸40320的工作状态,第三拉带机构单杆气缸40320的控制电路根据接收到的第三拉带机构第一磁性开关40321和第三拉带机构第二磁性开关40322的信号,以使第三拉带机构单杆气缸40320做出向前或向后的动作;第三拉带机构403还包括第三拉带机构第一固定块403091和第三拉带机构第二固定块403092,第三拉带机构第一固定块403091和第三拉带机构第二固定块403092分别位于第三拉带机构单杆气缸移动块40324的两侧,对第三拉带机构单杆气缸移动块40324的上下位移起到限位的作用。
86.第三拉带机构403的工作流程如下所示:当pet带10向前运动至第三拉带机构固定柜 40301,位于pet带10一面的天线射频smp板对板转接器套管23的部分进入第三拉带机构固定柜40301开口朝外的u形槽时,第三拉带机构气缸40310带动第三拉带机构气缸连接块 40311作用于第三拉带机构移动块40304,使得第三拉带机构气缸连接块40311向外开口的u 形槽嵌入第三拉带机构移动块40304的贯通开口内,使得位于第三拉带机构移动块40304的贯通开口内的pet带10固定;与此同时,第三拉带机构单杆气缸40320的控制电路根据接收到的第三拉带机构第一磁性开关40321和第三拉带机构第二磁性开关40322的信号,以使第三拉带机构单杆气缸40320沿着与pet带10向前运动方向相同的方向运动,第三拉带机构单杆气缸40320控制第三拉带机构单杆气缸移动块40324带动与第三拉带机构单杆气缸 40320连接接触的第三拉带机构单杆气缸固定座40323沿着pet带10向前运动方向移动,从而带动与第三拉带机构单杆气缸移动块40324相连的第三拉带机构移动块40304沿着pet带 10向前运动方向移动,这样就拉动位于第三拉带机构移动块40304的贯通开口内的pet带 10沿着pet带10向前运动方向移动;之后,第三拉带机构气缸40310带动第三拉带机构气缸连接块40311反方向作用使得第三拉带机构气缸连接块40311向外开口的u形槽离开第三拉带机构移动块40304的贯通开口内,第三拉带机构单杆气缸40320的控制电路根据接收到的第三拉带机构第一磁性开关40321和第三拉带机构第二磁性开关40322的信号,以使第三拉带机构单杆气缸40320沿着与pet带10向前运动方向相反的方向运动,第三拉带机构单杆气
缸40320控制第三拉带机构单杆气缸移动块40324带动与第三拉带机构单杆气缸40320 连接接触的第三拉带机构单杆气缸固定座40323沿着pet带10向前运动方向相反的方向移动,从而带动与第三拉带机构单杆气缸移动块40324相连的第三拉带机构移动块40304回退至原来的位置,从而为下一次拉动pet带10向前运动做好了准备;这样,通过第三拉带机构气缸40310和第三拉带机构单杆气缸40320的往复运动,就实现了拉动pet带10不断向前运动。
87.参照图27,分离装置5包括依照pet带10前进方向排列的固定于第五底座500上面的推带机构51和分离机构52,推带机构51用于将离开成型加工装置4的pet带10推进至分离机构52,分离机构52将装在通孔11的天线射频smp板对板转接器套管23从通孔11中分离出来;分离出来的天线射频smp板对板转接器套管23根据需要进行包装,这样,就完成了自动化加工天线射频smp板对板转接器套管的全部步骤。
88.作为分离装置5的一种实施方式,推带机构51由定位块01固定在第五底座500上面。
89.参照图28,推带机构51包括推带机构固定柜5101、位于推带机构固定柜5101设有的沟槽的两侧的推带机构第一固定板5102和推带机构第二固定板5103以及推带机构单杆气缸 5120,所述沟槽横向延伸,所述沟槽的底部设有开口向外的u形槽,以使位于pet带10一面的天线射频smp板对板转接器套管23的部分顺利通过;推带机构单杆气缸5120位于推带机构固定柜5101的一侧,推带机构单杆气缸5120设有推带机构单杆气缸固定座5123、推带机构单杆气缸移动块5124,推带机构单杆气缸5120控制推带机构单杆气缸移动块5124带动与推带机构单杆气缸5120连接接触的推带机构单杆气缸固定座5123往复移动;推带机构第一固定板5102和推带机构第二固定板5103起到对推带机构单杆气缸固定座5123和推带机构单杆气缸移动块5124定位的作用。
90.作为推带机构51的一种实施方式,推带机构51还包括与推带机构单杆气缸移动块5124 相连的推带机构移动块5104,位于推带机构移动块5104两侧以限定拉带机构移动块上下移动的推带机构第一定位板51021和推带机构第二定位板51031,位于推带机构移动块5104上面的对推带机构移动块5104左右位移起到限定作用的推带机构第一定位块5105;推带机构 51还包括推带机构气缸5110和推带机构气缸连接块5111;推带机构移动块5104设有贯通的开口,推带机构气缸连接块5111与推带机构移动块5104相接的一端为开口朝外的u形槽;当推带机构气缸5110作用于推带机构气缸连接块5111时,推带机构气缸连接块5111与推带机构移动块5104相接,该u形槽正好嵌入推带机构移动块5104贯通的开口内,该u形槽开口的宽度与pet带10的宽度相配,使得pet带10正好处于该u形槽开口内;推带机构51 还包括推带机构第二定位块5106,推带机构第二定位块5106位于推带机构移动块5104与推带机构固定柜5101的端部交接处,对推带机构移动块5104与pet带10前进方向相反的方向移动起到限定作用;推带机构51还包括位于推带机构单杆气缸5120一端的推带机构第一磁性开关5121和位于推带机构单杆气缸5120与推带机构单杆气缸固定座5123连接处的推带机构第二磁性开关5122,推带机构第一磁性开关5121和推带机构第二磁性开关5122用于感应推带机构单杆气缸5120的工作状态,推带机构单杆气缸5120的控制电路根据接收到的推带机构第一磁性开关5121和推带机构第二磁性开关5122的信号,以使推带机构单杆气缸5120 做出向前或向后的动作;推带机构51还包括推带机构第三定位块5107和推带机构第四定位块5108,推带机构第三定位块5107和推带机构第四定位块5108分别位于推带机构单
杆气缸移动块5124的两侧,对推带机构单杆气缸移动块5124的上下位移起到限位的作用。
91.推带机构51的工作流程如下所示:当pet带10向前运动至推带机构固定柜5101,位于 pet带10一面的天线射频smp板对板转接器套管23的部分进入推带机构固定柜5101开口朝外的u形槽时,推带机构气缸5110带动推带机构气缸连接块5111作用于推带机构移动块 5104,使得推带机构气缸连接块5111向外开口的u形槽嵌入推带机构移动块5104的贯通开口内,使得位于推带机构移动块5104的贯通开口内的pet带10固定;与此同时,推带机构单杆气缸5120的控制电路根据接收到的推带机构第一磁性开关5121和推带机构第二磁性开关5122的信号,以使推带机构单杆气缸5120沿着与pet带10向前运动方向相同的方向运动,推带机构单杆气缸5120控制推带机构单杆气缸移动块5124带动与推带机构单杆气缸5120 连接接触的推带机构单杆气缸固定座5123沿着pet带10向前运动方向移动,从而带动与推带机构单杆气缸移动块5124相连的推带机构移动块5104沿着pet带10向前运动方向移动,这样就推动位于推带机构移动块5104的贯通开口内的pet带10沿着pet带10向前运动方向移动;之后,推带机构气缸5110带动推带机构气缸连接块5111反方向作用使得推带机构气缸连接块5111向外开口的u形槽离开推带机构移动块5104的贯通开口内,推带机构单杆气缸5120的控制电路根据接收到的推带机构第一磁性开关5121和推带机构第二磁性开关 5122的信号,以使推带机构单杆气缸5120沿着与pet带10向前运动方向相反的方向运动,推带机构单杆气缸5120控制推带机构单杆气缸移动块5124带动与推带机构单杆气缸5120连接接触的推带机构单杆气缸固定座5123沿着pet带10向前运动方向相反的方向移动,从而带动与推带机构单杆气缸移动块5124相连的推带机构移动块5104回退至原来的位置,从而为下一次推动pet带10向前运动做好了准备;这样,通过推带机构气缸5110和推带机构单杆气缸5120的往复运动,就实现了推动pet带10不断向前运动。
92.参照图29至图31,分离机构52包括气缸、导向柱、分离部以及分离机构固定柜5213;所述气缸包括分离机构第一气缸5211和分离机构第二气缸5212,所述导向柱连接分离机构第一气缸5211和分离机构固定柜5213,分离机构第二气缸5212位于分离机构固定柜5213 的顶部,所述分离部位于分离机构固定柜5213与分离机构第一气缸5211之间;当装入pet 带10开设的通孔11的天线射频smp板对板转接器套管23运送至分离机构固定柜5213开设的分离机构进料口52131时,分离机构第二气缸5212向下运动作用于所述分离部以使通孔 11变形,分离机构第一气缸5211沿所述导向柱作用于所述分离部以将天线射频smp板对板转接器套管23从变形的通孔11中推出。
93.作为分离机构52的一种实施方式,所述分离部包括分离机构固定块52147、分离机构第一推块52141、分离机构第二推块52142、分离机构第一推杆5215以及分离机构第二推杆5216;分离机构固定块52147的一端嵌入分离机构固定柜5213设有的分离机构第二定位孔52134 内;分离机构固定块52147的另一端通过分离机构第二推块52142设有的通孔嵌入分离机构第一推块52141设有的开口内,分离机构第一推杆5215和分离机构第二推杆5216的一端通过分离机构第二推块52142设有的通孔嵌入分离机构第一推块52141设有的开口内,从而使得分离机构第一推块52141与分离机构第二推块52142相连;分离机构第一推杆5215和分离机构第二推杆5216的另一端面向分离机构固定柜5213,当分离机构第一气缸5211沿所述导向柱向前运动时,分离机构第一气缸5211推动分离机构第一推块52141和分离机构第二推块 52142,从而使分离机构第一推杆5215的另一端进入分离机构固定柜5213
设有的分离机构第一定位孔52132内,分离机构第二推杆5216的另一端进入分离机构固定柜5213设有的分离机构推料口52133内。所述分离部还包括分离机构移动块52148和分离机构第三定位块52145,分离机构移动块52148嵌于分离机构固定柜5213开设的分离机构沟槽52135内,分离机构第三定位块52145位于分离机构移动块52148顶部以使分离机构移动块52148只能沿分离机构沟槽52135上下移动,分离机构第一推杆5215的另一端从分离机构移动块52148设有的通孔中穿出再进入分离机构第一定位孔52132;分离机构第二气缸5212作用于分离机构移动块 52148顶部时,分离机构第一推杆5215通过分离机构移动块52148的通孔对分离机构移动块 52148的位移距离进行限制,使得分离机构移动块52148的底部正好接触到pet带10,将pet 带10压变形从而使pet带10的通孔11变形,避免了分离机构移动块52148位移过大压到天线射频smp板对板转接器套管23并对天线射频smp板对板转接器套管23造成损坏。所述分离部还包括分离机构第四定位块52146,分离机构第四定位块52146设有贯通的开口,以使分离机构第四定位块52146嵌入分离机构固定块52147的一端,分离机构第二推杆5216 位于分离机构第四定位块52146上面,以使分离机构第二推杆5216的一端准确嵌入分离机构第二推块52142设有的通孔。所述分离部还包括分离机构第一定位块52143和分离机构第二定位块52144,分离机构第一定位块52143和分离机构第二定位块52144的两端分别设有u 形开口,分离机构第一定位块52143位于分离机构第二定位块52144上方,分离机构第一定位块52143开口朝下的u形开口与分离机构第二定位块52144开口朝上的u形开口位置相对,分离机构第一定位块52143位于分离机构第一推杆5215下方,分离机构第一推杆5215通过分离机构第一推杆5215开口朝上的u形开口之后再穿入分离机构移动块52148设有的通孔;分离机构第二定位块52144位于分离机构第二推杆5216下方,分离机构第二定位块52144的开口朝下的u形开口嵌于分离机构固定块52147上面,以使分离机构第二推杆5216经过分离机构第四定位块52146之后再通过分离机构第二定位块52144的开口朝上的u形开口;分离机构第一定位块52143用于限定分离机构第一推杆5215的位置,以使分离机构第一推杆 5215的另一端进入分离机构第一定位孔52132内;分离机构第二定位块52144用于限定分离机构第二推杆5216的位置,以使分离机构第二推杆5216另一端进入分离机构推料口52133 内。所述导向柱包括分离机构第一导向柱52101、分离机构第二导向柱52102、分离机构第三导向柱52103以及分离机构第四导向柱52104,分离机构第一导向柱52101、分离机构第二导向柱52102、分离机构第三导向柱52103以及分离机构第四导向柱52104的一端位于分离机构固定柜5213设有的固定孔内,分离机构第一导向柱52101、分离机构第二导向柱52102、分离机构第三导向柱52103以及分离机构第四导向柱52104的另一端与分离机构第一气缸 5211设有的分离机构第一气缸固定座52100相连,从而使得分离机构第一气缸5211沿着分离机构第一导向柱52101、分离机构第二导向柱52102、分离机构第三导向柱52103以及分离机构第四导向柱52104往复运动。
94.具体地,分离机构第二气缸5212设有分离机构第二气缸固定座52102和分离机构连接块 52103,分离机构第二气缸固定座52102和分离机构连接块52103位于分离机构固定柜5213 顶部与分离机构第二气缸5212之间,分离机构连接块52103的一面嵌入分离机构第二气缸固定座52102的另一面,分离机构第二气缸固定座52102的底部与分离机构移动块52148的顶部相接,分离机构第二气缸5212控制分离机构连接块52103带动与分离机构连接块52103连接接触的分离机构第二气缸固定座52102向下运动,以使分离机构移动块52148
产生向下位移接触pet带10,从而使得分离机构移动块52148作用于pet带10的力度使得pet带10 开设的通孔11变形。
95.具体地,分离机构沟槽52135沿分离机构固定柜5213纵向延伸,分离机构进料口52131 沿分离机构固定柜5213横向延伸,分离机构推料口52133位于分离机构沟槽52135与分离机构进料口52131交接处。
96.具体地,分离机构第一定位孔52132位于分离机构推料口52133上方,分离机构第二定位孔52134位于分离机构推料口52133下方。
97.具体地,分离机构第一定位孔52132、分离机构第二定位孔52134以及分离机构推料口 52133开口于分离机构沟槽52135内壁。
98.分离机构52的工作流程如下所述:当装入pet带10开设的通孔11的天线射频smp板对板转接器套管23运送至分离机构固定柜5213开设的分离机构进料口52131时,分离机构第二气缸5212控制分离机构连接块52103带动与分离机构连接块52103连接接触的分离机构第二气缸固定座52102向下运动,从而推动与分离机构第二气缸固定座52102相接的分离机构移动块52148的顶部,以使分离机构移动块52148产生向下位移接触pet带10,从而使得分离机构移动块52148作用于pet带10的力度使得pet带10开设的通孔11变形;与此同时,分离机构第一气缸5211沿分离机构第一导向柱52101、分离机构第二导向柱52102、分离机构第三导向柱52103以及分离机构第四导向柱52104的方向往前移动,从而使得与分离机构第一气缸5211连接接触的分离机构第一气缸固定座52100推动分离机构第一推块52141 向前运动,分离机构第一推块52141推动与分离机构第一推块52141相接的分离机构第二推块52142向前运动,从而带动嵌入分离机构第一推块52141和分离机构第二推块52142的第一推杆向前运动至分离机构第一定位孔52132,分离机构第二推杆5216向前运动至分离机构推料口52133,分离机构第一定位孔52132限制分离机构第二推杆5216向前运动至分离机构推料口52133的距离,使得分离机构第二推杆5216向前运动至pet带10的冲力将天线射频 smp板对板转接器套管23从pet带10变形的通孔11中推出,从而实现了将天线射频smp 板对板转接器套管23与pet带10分离的目的;之后,分离机构第二气缸5212控制分离机构连接块52103带动与分离机构连接块52103连接接触的分离机构第二气缸固定座52102向上运动,从而使得分离机构移动块52148向上运动离开pet带10,分离机构第一气缸5211 沿分离机构第一导向柱52101、分离机构第二导向柱52102、分离机构第三导向柱52103以及分离机构第四导向柱52104向后运动,从而使得分离机构第一推块52141以及与分离机构第一推块52141相连的分离机构第二推块52142依惯性向后运动,从而使得分离机构第一推杆 5215离开分离机构第一定位孔52132,分离机构第二推杆5216离开分离机构推料口52133,从而为下一次推料做好了准备。
99.优选地,pet带10按照固定步距移动,以输送装在通孔11的物料20或一端具有槽位的物料21或两端具有槽位的物料22或smp板对板转接器套管23,以便控制及调节加工速度;,槽位201为八个,其中,四个槽位201平均分布于物料20的一端,四个槽位201平均分布于物料20的另一端;第一成型机构401和第二成型机构402在加工环状凸起202时,采用四向同步同时动作,以使环状凸起202的尺寸稳定且表面圆滑,从而实现了槽位201及环状凸起 202符合smp板对板转接器套管的规格要求;第一底座100、第二底座200、第三底座300、第四底座400以及第五底座500的高度可通过设置于底座下面的气缸以气动方式进行调节,使得
零件容易加工且容易拆卸。
100.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1