一种天线同步翻转机构的制作方法
1.本发明涉及机载技术领域,具体涉及一种天线同步翻转机构。
背景技术:
2.目前,国内外天线翻转机构主要运用于地面高机动雷达产品和星载产品上。天线翻转机构主要分为两大类:一类是采用单个驱动装置和多个连杆之间的相互作用形成的翻转机构,该类机构动力源简单,但占用空间大且设计较为复杂;另一类是多驱动辅助翻转机构,通过多个驱动装置将天线翻转到指定位置,该类翻转机构所占空间较大,设计较为简单,但设计成本高且同步性较差。
3.对于机载雷达由于其精度高,所受冲击载荷大,故天线阵面一般为整块结构。然而,随着雷达体制的发展,机载雷达也从传统的单一探测功能逐渐转变为集侦察、定位、干扰于一体的多功能雷达。因此,机载雷达在结构上也逐渐对机动性有更高的要求。为了实现机载雷达在工作状态时对指定区域进行干扰和侦察等功能,机载雷达也需要在工作状态时将天线进行展开和拼接;同时要求翻转机构具有高强度、响应快、同步性好、占用空间小等特点。上述地面高机动式雷达的翻转机构虽然可以满足天线的展开、折叠等功能,但大多存在占用空间较大等局限性,局限性问题亟待解决,为此,提出一种天线同步翻转机构。
技术实现要素:
4.本发明所要解决的技术问题在于:如何解决机载型天线在工作时的快速同步折叠与展开的问题,提供了一种天线同步翻转机构。
5.本发明是通过以下技术方案解决上述技术问题的,本发明包括底座、驱动装置、丝杆螺母副、连杆、俯仰轴组件,所述驱动装置设置在所述底座上,所述丝杆螺母副包括丝杆与螺母,所述丝杆的一端与驱动装置连接,另一端与所述底座连接,所述螺母套设在所述丝杆上,与所述连杆的一端转动连接,所述连杆的另一端与天线阵面连接,所述俯仰轴组件设置在所述底座上,与天线阵面连接,所述连杆、所述丝杆螺母副的数量均与天线阵面的数量相匹配,以所述驱动装置为对称中心对称设置。
6.更进一步地,所述驱动装置包括直流电机与减速机,所述直流电机的输出轴与所述减速机连接。
7.更进一步地,所述丝杆的一端与所述减速机的输出轴连接,另一端与所述底座之间设置有第一轴承座,并通过所述第一轴承座与所述底座转动连接。
8.更进一步地,所述丝杆与所述减速机的输出轴之间设置有胀紧套,所述丝杆与所述减速机的输出轴通过所述胀紧套连接。
9.更进一步地,所述丝杆为梯形螺纹丝杆。
10.更进一步地,所述连杆为y型连杆,一端与所述螺母铰接,另一端与天线阵面上设置的两个双支耳铰接,驱动装置通过丝杆带动螺母进行直线运动,进而带动连杆和天线阵面进行翻转。
11.更进一步地,所述俯仰轴组件包括第二轴承座、俯仰轴、轴承,所述俯仰轴的一端通过所述轴承与所述第二轴承座转动连接,另一端与天线阵面连接,所述第二轴承座设置在所述底座上。
12.更进一步地,一个天线阵面对应两个所述俯仰轴组件,两个所述俯仰轴组件分别设置在天线阵面的两端。
13.更进一步地,任意其中一个所述俯仰轴组件还包括编码器,所述编码器设置在所述俯仰轴与天线阵面之间。
14.更进一步地,所述天线同步翻转机构还包括设置在极限行程位置的机械限位装置。
15.更进一步地,所述底座采用围框式设计,将所述驱动装置的安装接口、所述第一轴承座安装接口、所述第二轴承座安装接口通过多条辐射筋全部相连形成一个整体结构,每条辐射筋上开设有多个减重孔。
16.更进一步地,天线阵面、丝杆螺母副、连杆的数量均为两个,对称设置在所述底座的两侧。
17.本发明相比现有技术具有以下优点:
18.1、本发明翻转机构采用丝杆螺母驱动连杆进而带动天线翻转,通过翻转机构的各个连杆之间的相互作用与限位装置,实现了天线从0
°
平稳翻转至45
°
位置;同时保证天线在0
°
和45
°
位置均有较好的稳定性,适用于长时间连续稳定工作。
19.2、本发明翻转机构采用一个驱动装置,减速机采用双输出型,丝杆螺母和连杆呈左右对称分布,保证了天线在翻转过程中的同步性。一个驱动装置也可降低成本。
20.3、本发明翻转机构左右两天线在0
°
时为两端接触状态,使得天线在0
°
位置工作时两阵面完全拼接;由于天线存在一定的厚度,因此,本发明翻转机构采用将天线朝下翻转至45
°
,该机构可保证翻转过程左右两阵面不干涉。
21.4、本发明翻转机构采用丝杆与减速机输出轴同轴驱动,将驱动装置内嵌至底座上,充分利用天线由0
°
下降至45
°
所需空间,使整个翻转机构不占用更多的纵向空间;同时尽可能缩短螺母行程,减少天线展开与合并所需时间。
22.5、本发明翻转机构采用编码器、水平传感器和限位装置等多种检测装置,实现对传动机构的运动控制,提高控制精度与安全性。
23.6、本发明翻转机构的底座为围框式结构,所有辐射筋与底座之间采用钛合金整体加工而成,机构具有强度高的特性。
附图说明
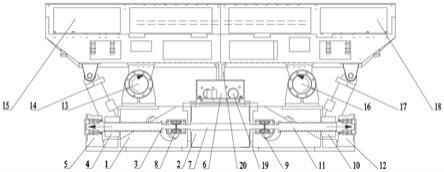
24.图1是本发明实施例二中左右两天线在水平方向为0
°
时翻转机构的状态示意图;
25.图2是本发明实施例二中左右两天线在水平方向为45
°
时翻转机构的状态示意图;
26.图3是本发明实施例二中天线同步翻转机构的结构示意图;
27.图4是本发明实施例二中y型连杆的结构示意图;
28.图5是本发明实施例二中俯仰轴组件的结构示意图。
具体实施方式
29.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
30.实施例一
31.本实施例提供一种技术方案:一种天线同步翻转机构,包括底座、驱动装置、丝杆螺母、连杆、编码器、俯仰轴组件等。驱动装置带动丝杆螺母机构进行直线运动,进而实现天线绕底座上的俯仰轴进行旋转运动。驱动装置为无刷电机+减速机组成,减速机选用双输出减速机,两端通过胀紧套连接两个旋向相反的丝杆;由于减速机为双输出型,两根丝杆同轴,可以保证该机构在运动过程中左右两个螺母运动的同步性较高。丝杆选用梯形丝杆,可以实现任意位置自锁停。在天线旋转的两个极限位置设置限位组件,保证天线能够在到达极限位置后停住。其中,底座与直升机外舱侧壁通过一圈螺栓相连,驱动装置安装在底座上;俯仰轴组件安装在底座伸出的末端,天线与俯仰轴组件之间通过支耳连接,由键驱动。天线在翻转到0
°
和45
°
时设有机械限位装置,防止天线因控制系统失灵导致损坏。
32.本实施例所述的一种天线同步翻转机构,其中,驱动装置布置与于整个翻转机构的中心位置,两对丝杆螺母通过连杆与天线左右底部相连。由于天线由两部分组成,呈左右对称分布,因此通过螺母带动连杆机构进行直线运动时可保持左右天线转动的同步性。
33.本实施例所述的一种天线同步翻转机构,其中,底座为7075铝板整体加工而成。底座采用围框式结构,为了增加整体强度,底座上加工多个辐射筋。底座上与俯仰轴组件相连的筋板与辐射筋相连,每个筋板上开1
‑
2个减重孔。底座底部作为与机舱侧壁的安装接口,通过一圈螺栓固定。底座上表面沿水平方向左右对称加工四个安装面,作为俯仰轴组件的安装平面。俯仰轴组件与底座之间通过螺钉相连。
34.本实施例所述的一种天线同步翻转机构,其中,驱动装置为电机+双输出减速机。为了减小俯仰向空间,驱动装置采用内嵌式安装在底座上。
35.本实施例所述的一种天线同步翻转机构,其中,连杆为y字型。连杆下端与螺母连接,上端分叉成两个单支耳,分别与左右天线底部的双支耳通过销轴连接。
36.本实施例所述的一种天线同步翻转机构,其中,天线安装在骨架上,骨架底部装有支耳。为了尽可能缩小翻转机构所占用的俯仰向尺寸,使整个系统占用空间小,骨架底部与俯仰轴组件相连的支耳装在骨架中间的位置,该位置使得整个天线的回转半径最小。同时,天线和骨架整体与俯仰轴组件连接。考虑到俯仰轴同时受到轴向力和径向力,因此选用成对安装的圆锥滚子轴承。俯仰轴组件的轴承座内腔添加润滑脂,减少摩擦力。
37.实施例二
38.如图1~4所示,本实施例中的天线同步翻转机构,包括底座1、驱动装置2、第一丝杆3、第一螺母4、第一小轴承座5、伺服控制器6、减速机输出轴7、第一胀紧套8、第二胀紧套9、第二丝杆11、第二螺母10、第二小轴承座12、第一大轴承座组13、第一连杆14、第一天线15、第二大轴承座组16、第二连杆17、第二天线18、连接器19、限位组件20、编码器21。
39.在图1中,驱动装置2为电机+减速机整体固定在底座1上,双输出减速机相对于底座1左右对称。减速机输出轴7通过第一胀紧套8、第二胀紧套9带动第一丝杆3、第二丝杆11转动,同时,第一丝杆3、第二丝杆11分别带动第一螺母4、第二螺母10同步进行直线运动,进
而带动第一连杆14、第二连杆17将左右天线(第一天线15、第二天线18)实现展开与合并的动作。驱动装置2通过连接器19与伺服控制器6电连接,受伺服控制器6的控制进行动作。
40.两个连杆均为y型连杆,一端通过销轴与螺母(第一螺母4、第二螺母10)铰接,另一端分叉成两个单支耳与天线(第一天线15、第二天线18)骨架上的两个双支耳铰接;第一小轴承座5、第二小轴承座12固定在底座1的左右两端上,用于支撑第二丝杆11、第一丝杆3的一端;第一大轴承座组13、第二大轴承座组16中均包括两个大轴承座,固定在底座1凸起的安装面上,四个安装面关于底座1的中心对称。每对大轴承座之间保证高同轴度,配合其内部设置的俯仰轴形成俯仰轴组件,作为第一天线15、第二天线18的转轴,同时起到支撑整个第一天线15、第二天线18的作用。为了减轻重量,底座1采用轻量化设计,选用钛合金材料,并加工多个减重孔。y型连杆为钛合金整体加工,内部采用减重设计,并添加数条纵向加强筋提高强度。
41.丝杆及连杆选用40cr调质钢整体加工,确保整个传动机构强度。所述翻转机构与安装面通过一圈螺钉相连。
42.所述翻转机构在天线翻转的极限位置设有机械限位组件20,防止因电机失灵等状况导致左右阵面越过极限位置进而发生碰撞,起到物理限位的作用。当左右螺母在驱动装置2的带动下相互远离时,两个连杆将天线上推以实现合并功能。0
°
限位装置(限位组件20)安装在驱动装置2的盖板上,当两天线翻到该位置时骨架与限位组件20接触。图1为左右两天线在水平方向为0
°
时翻转机构的状态示意图。
43.当左右螺母在驱动装置2的带动下相互靠近时,第一连杆14、第二连杆17将第一天线15、第二天线18向下拉以实现展开功能。两个丝杆靠近驱动装置端设有45
°
时的限位装置,当天线转到该位置时螺母与丝杆上的限位装置接触;图2为左右两天线在水平方向为45
°
时翻转机构的状态示意图。
44.如图5所示,俯仰轴组件包括大轴承座131、俯仰轴132、圆锥滚子轴承133、旋转油封134和端盖135。编码器21安装在第一大轴承座组13中的大轴承座131上,一端俯仰轴132连接,另一端与第一天线15连接。由于天线的重心距离各大轴承座较远,因此在举升过程中轴承同时受到轴向载荷和径向载荷,故选用成对安装的圆锥滚子轴承134。
45.所述编码器21与俯仰轴132同轴安装,可以将角度信息实时反馈给控制系统。
46.综上所述,上述实施例的天线同步翻转机构的驱动装置带动丝杆螺母进行直线运动,通过连杆传力进而实现天线绕轴承座平台进行旋转运动,达到工作要求的角度;具有控制精度高、安全性高、刚性强、可靠性好、同步性好、翻转空间小的优良特性,有效解决了天线翻转过程中阵面尺寸与翻转机构所占空间的矛盾,值得被推广使用。
47.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1