基板处理方法和基板处理装置与流程
1.本技术涉及基板处理方法和基板处理装置。
背景技术:
2.在半导体器件和液晶显示装置等的产品的制造工序中,使用对基板进行 各种处理的基板处理装置。该基板处理装置包括向基板供给处理液的多个处 理单元、搬运基板的搬运单元以及控制这些的控制单元。处理单元向从搬运 单元一张一张地搬入的基板供给处理液,对基板一张一张地进行处理。若处 理单元对多个基板进行处理,则在处理单元的内部逐渐地积累污染(颗粒等)。 因此,在基板处理装置中,根据需要执行清洗处理单元的内部的单元清洗(例 如专利文献1)。
3.为了进行该单元清洗,有时使用仿真基板。仿真基板是指,虽然不是进 行用于制作产品的处理的基板(产品基板),但是具有与该产品基板相同的 外形的基板。在将仿真基板保持于处理单元内的基板保持架的状态下进行单 元清洗处理,从而与在基板保持架上不保持任何基板的状态相比,能够进行 多种单元清洗。例如,有时为了使清洗液到达处理单元内的特定的位置,将 仿真基板保持于基板保持架,向仿真基板供给清洗液。即,由于在处理单元 中存在不使用仿真基板无法通过单元清洗进行清洗的地方,因此使用仿真基 板来清洗处理单元内部是有效的。
4.专利文献1:日本特开2017
‑
41506号公报
5.在基板处理装置的多个处理单元中,可能包括制造工序中的不同的制造 阶段中使用的处理单元。例如,包括制造工序中的初期工序(所谓的前道工 序(front end of line,feol))中使用的处理单元和中期工序(所谓的 中道工序(middle end of line,meol))中使用的处理单元。
6.feol用的处理单元中搬入的基板的膜结构与meol用的处理单元中搬 入的基板的膜结构不同,另外,在feol用的处理单元中向基板供给的处理 液的种类可能与在meol用的处理单元中向基板供给的处理液的种类不同。 由此,在feol用的处理单元中产生的颗粒等的污染的种类可能与在meol 用的处理单元中产生的污染的种类不同。
7.若对这种不同用途的处理单元使用相同的仿真基板,则存在一种用途的 处理单元的污染经由该仿真基板向另一种用途的处理单元内扩散的问题。
技术实现要素:
8.因此,本技术是鉴于上述课题而提出的,其目的在于提供一种能够抑制 处理单元的污染的扩散的技术。
9.基板处理方法的第一方式是一种基板处理方法,具备:设定工序,基于 用户的输入对基板处理装置所具备的多个处理单元的每一个设定容纳器中容 纳的多个仿真基板中的能够使用的仿真基板,生成表示在多个所述处理单元 中的每一个能够使用的仿真基板的设定信息;仿真基板特定工序,基于所述 设定信息,从多个所述仿真基板中特定在多个
所述处理单元中的第一处理单 元中能够使用的第一仿真基板;以及仿真处理工序,所述基板处理装置具备 的搬运部将所述第一仿真基板从所述容纳器搬运到所述第一处理单元,所述 第一处理单元对所述第一仿真基板进行仿真处理。
10.基板处理方法的第二方式是根据第一方式的基板处理方法,所述设定 工序包括:基于用户的输入,对多个所述处理单元分别设定处理类别的工 序;以及基于用户的输入,对多个所述仿真基板分别设定处理类别的工序, 在所述仿真基板特定工序中,将属于与所述第一处理单元的处理类别相同 的处理类别的仿真基板特定为所述第一仿真基板。
11.基板处理方法的第三方式是根据第二方式的基板处理方法,处理类别 包括表示划分半导体器件的制造工序的多个处理阶段中的某一个的类别。
12.基板处理方法的第四方式是根据第二方式或第三方式的基板处理方法, 对多个所述仿真基板的处理类别包括表示能够使用于多个所述处理单元中的 任一个的类别。
13.基板处理方法的第五方式是根据第二方式至第四方式中的任一个方 式的基板处理方法,所述设定工序还具备:基于用户的输入,将所述搬运 部包括的多个手部中的、用于所述第一仿真基板的搬运的手部按照处理类 别设定的工序。
14.基板处理方法的第六方式是根据第一方式至第五方式中的任一个方 式的基板处理方法,在所述设定工序中,将多个所述仿真基板中的2个以 上的仿真基板设定为能够使用于所述第一处理单元,在所述仿真基板特定 工序中,将2个以上的所述仿真基板中的使用次数最少的仿真基板特定为 所述第一仿真基板。
15.基板处理方法的第七方式是根据第一方式至第六方式中的任一个方 式的基板处理方法,所述设定工序还具备:基于用户的输入,设定使用所 述基板处理装置的搬入部上载置的可搬的第一容纳器和所述基板处理装 置中设置的固定型的第二容纳器中的哪一个中容纳的多个所述仿真基板。
16.基板处理方法的第八方式是根据第一方式至第七方式中的任一个方 式的基板处理方法,所述设定工序还具备:基于用户的输入,设定所述仿 真处理的开始条件的工序,在所述工序中还包括将第一开始条件和第二开 始条件中的至少一个设定为多个所述处理单元中的每一个的所述开始条 件的工序,所述第一开始条件是指,多个所述处理单元中的每一个没有继 续对基板进行处理的寿命时间为寿命设定时间以上,所述第二开始条件是 指,多个所述处理单元中的每一个中的基板的处理张数为寿命设定张数以 上。
17.基板处理方法的第九方式是根据第八方式的基板处理方法,所述设定 工序还具备:基于用户的输入,设定所述寿命设定时间和所述寿命设定张 数中的至少一个的工序。
18.基板处理方法的第十方式是根据第一方式至第九方式中的任一个方 式的基板处理方法,所述设定工序还具备:基于用户的输入,对多个所述 处理单元中的每一个设定在所述仿真处理工序中使用的仿真基板的处理 张数的工序,在所述仿真处理工序中,将设定的处理张数的所述第一仿真 基板依次搬入所述第一处理单元,所述第一处理单元分别对依次搬入的所 述第一仿真基板进行所述仿真处理。
19.基板处理方法的第十一方式是根据第一方式至第十方式中的任一个 方式的基板处理方法,还具备处理工序,在所述处理工序中,多个所述处 理单元针对每个将预先确定的多个基板作为一个单位的处理任务,对该基 板依次执行处理,设定工序还具备:基于用户的输入,设定是在对所述处 理任务的处理的执行期间和对下一个所述处理任务的处理
的执行期间之 间进行所述仿真处理,还是在所述处理任务的执行期间内进行所述仿真处 理的工序。
20.基板处理方法的第十二方式是根据第一方式至第十一方式中的任一 个方式的基板处理方法,还具备检查工序,在所述检查工序中,检查所述 设定工序中的设定是否合适。
21.基板处理方法的第十三方式是根据第二方式至第四方式中的任一个 方式的基板处理方法,还具备检查工序,在所述检查工序中,检查对多个 所述仿真基板是否设定有多个所述处理单元中设定的所有类型的处理类 别。
22.基板处理方法的第十四方式是根据第一方式至第十三方式中的任一 个方式的基板处理方法,在所述仿真处理工序中,所述第一处理单元向所 述第一仿真基板供给清洗液。
23.基板处理方法的第十五方式是根据第一方式至第十四方式中的任一 个方式的基板处理方法,在所述仿真处理工序中,所述第一处理单元向所 述第一仿真基板供给与所述第一处理单元向基板供给的处理液相同的处 理液。
24.基板处理方法的第十六方式是根据第一方式至第十五方式中的任一 个方式的基板处理方法,还具备初始化工序,在所述初始化工序中,在将 多个所述仿真基板搬出到所述基板处理装置的外部时,初始化所述设定信 息。
25.基板处理装置的第一方式是基板处理装置,输入器件;多个处理单元; 搬运部,在容纳有多个仿真基板的容纳器和多个所述处理单元的每一个之 间搬运仿真基板;以及控制部,基于对输入装置的输入,对多个所述处理 单元中的每一个作成表示多个所述仿真基板中的能够使用的仿真基板的 设定信息,基于设定信息特定多个所述处理单元中的第一处理单元中能够 使用的第一仿真基板,使所述搬运部将所述第一仿真基板从所述容纳器搬 运到所述第一处理单元,使所述第一处理单元对所述第一仿真基板进行仿 真处理。
26.根据基板处理方法的第一方式、第三方式和基板处理装置的方式,设定 处理单元中能够使用的仿真基板。由此,在产生不同污染的处理单元中,通 过设定不同的仿真基板,能够抑制一种处理单元中产生的污染向另一种处理 单元扩散。
27.根据基板处理方法的第二方式,在处理类别不同的处理单元中,使用不 同的仿真基板,从而能够抑制不同污染的扩散。另外,对各处理单元设定一 个处理类别,对各仿真基板设定一个处理类别即可,从而能够容易设定。
28.根据基板处理方法的第四方式,能够提高可用性。
29.根据基板处理方法的第五方式,按照处理类别设定手部,从而还能够抑 制经由手部的污染的扩散。
30.根据基板处理方法的第六方式,与其他仿真基板相比能够大幅抑制特定 的仿真基板的使用次数。
31.根据基板处理方法的第七方式,能够提高可用性。
32.根据基板处理方法的第八方式,能够提高可用性。
33.根据基板处理方法的第九方式,能够提高可用性。
34.根据基板处理方法的第十方式,在仿真处理工序中,能够连续地进行1 次以上的仿真处理。仿真处理的连续次数(处理张数)根据每个处理单元设 定,从而能够以适合处理单元的次数进行仿真处理。
35.根据基板处理方法的第十一方式,能够提高可用性。
36.根据基板处理方法的第十二方式和第十三方式,能够抑制错误设定。
37.根据根据基板处理方法的第十四方式,能够清洗处理单元。
38.根据基板处理方法的第十五方式,能够调整处理单元的处理环境。
39.根据基板处理方法的第十六方式,在将新的多个仿真基板搬入基板处理 装置时,能够避免以之前的设定信息将仿真基板搬入处理单元。
附图说明
40.图1是概略地表示基板处理装置的整体结构的一例的图。
41.图2是概略地表示基板处理装置的结构的一例的侧视图。
42.图3是概略地表示基板处理装置的电结构的一例的框图。
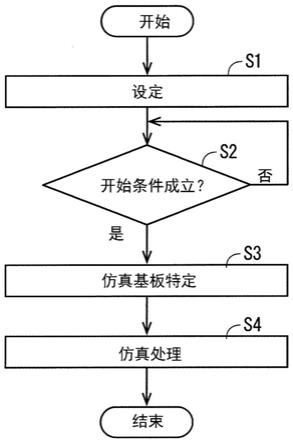
43.图4是表示基板处理装置的动作的一例的流程图。
44.图5是表示设定工序的一例的流程图。
45.图6是概略地表示第一设定图像的一例的图。
46.图7是概略地表示第二设定图像的一例的图。
47.图8是表示仿真基板特定工序的一例的流程图。
48.图9是表示手部和处理类别之间的关系的一例的图。
49.图10是表示仿真处理工序的一例的时序图。
50.图11是表示基板处理的一例的时序图。
51.图12是表示基板处理的一例的时序图。
52.图13是表示检查工序的一例的流程图。
53.图14是概略地表示第二设定图像的另一例的图。
54.图15是概略地表示初始化工序的一例的流程图。
55.其中,附图标记说明如下:
56.10:处理单元
57.90:控制部
58.100:基板处理装置
59.bf:容纳器(仿真基板容纳器)
60.c:容纳器(容纳架)
61.dw:仿真基板
62.cr:搬运部(中央机械手)
63.h:手部
64.ir:搬运部(分度器机械手)
65.w:基板
具体实施方式
66.以下,参照附图对实施方式进行说明。需要说明的是,附图是概略地表 示的图,为了便于说明,适当地进行结构的省略和结构的简略。另外,附图 所示的结构的大小以及位置的相互关系未必一定记载得精确,可能存在适当 变更。
67.另外,在以下所示的说明中,对相同的构成要素标注相同的附图标记进 行图示,它们的名称和功能也相同。因此,有时为了避免重复而省略对其的 详细说明。
68.另外,在以下记载的说明中,即使在使用“第一”或“第二”等序数的 情况下,这些用语也是为了容易理解实施方式的内容而使用的,并不限定于 由这些序数产生的顺序等。
69.表示相对或绝对的位置关系的表述(例如“在一个方向上”,“沿着一 个方向”,“平行”,“正交”,“中心”,“同心”,“同轴”等)只要 没有特别的说明,不仅表示严格意义上的其位置关系,还表示在公差或可得 到相同程度的功能的范围内相对地对角度或距离进行了位移的状态。表示处 于相等状态的表述(例如“相同”,“相等”,“均质”等)只要没有特别 的说明,不仅表示定量地严格意义上的相等的状态,还表示存在公差或可得 到相同程度功能的差异的状态。表示形状的表述(例如,“四边形形状”或
ꢀ“
圆筒形状”等)只要没有特别说明,不仅表示几何学上严格意义的该形状, 还表示在能够得到相同程度的效果的范围内具有例如凹凸或斜切角等的形 状。将一个构成要素表现为“具备”,“拥有”,“包括”,“包含”或“具 有”这样的表述并不是排除其他构成要素的存在的排他性表述。“a、b以 及c中至少一个”这样的表现包括仅a,仅b,仅c,a、b以及c中的任 意两个,以及a、b以及c全部的情况。
70.<基板处理装置的概略结构>
71.图1是概略地表示基板处理装置100的结构的一例的俯视图。图2是概 略地表示基板处理装置100的结构的一例的侧视图。
72.如图1所示,基板处理装置100例如是能够用于去除附着于作为基板的 一例的半导体基板(wafer)w的表面的有机类的残渣的处理的单张式装置。 作为有机类的残渣,例如,包括在向基板w的表面注入杂质的离子注入处理 等之后残留于基板w的表面的不需要的抗蚀剂,或者来自附着于基板w的 表面的外周部附近的抗蚀剂等的有机类垃圾等。另外,基板处理装置100也 能够用于无机类残渣去除以及基板w的蚀刻。
73.基板处理装置100包括:装载埠lp,作为保持作为容纳器的多个容纳架 c的容纳器保持机构;以及多个处理单元10,用于处理基板w(在本实施方 式中为12台)。
74.在装载埠lp中,容纳多个基板w的多个容纳架c在俯视时沿着水平的 排列方向d排列。容纳架c从基板处理装置100的外部搬入装载埠lp,因 此装载埠lp作为搬入基板w的搬入部发挥作用。
75.在图1的例子中,俯视时,排列有4台处理单元10。在基板处理装置1 00中,这4台处理单元10中分别构成的多组(例如3组)处理单元10配置 成在铅垂方向上层叠。
76.基板处理装置100还包括例如分度器机械手ir、中央机械手cr以及控 制部90。分度器机械手ir在装载埠lp和中央机械手cr之间搬运基板w。 中央机械手cr在分度器机械手ir和各处理单元10之间搬运基板w。
77.分度器机械手ir在与排列方向d正交的方向上与装载埠lp相邻地设 置。分度器机械手ir设置成能够在排列方向d上移动,且能够移动到与各 容纳架c相对的位置。分度器机械手ir能够从各容纳架c一张一张地搬出 基板w,将该基板w搬运到基板载置部110。基板载置部110设置在俯视时 相对于分度器机械手ir位于与装载埠lp相反侧,包括载置基板w的载置 台。分度器机械手ir能够从基板载置部110向各容纳架c一张一张地搬运 基板w。
78.中央机械手cr设置在俯视时相对于基板载置部110位于与分度器机械 手ir相反侧,能够从基板载置部110搬出基板w。在图1的例子中,俯视 时,四个塔tw配置成包围中央
机械手cr。各塔tw由在铅垂方向上层叠 的多个(例如三个)处理单元10构成。基板载置部110位于四个塔tw中 的位于分度器机械手ir侧的两个塔tw之间。另外,在图2的例子中,仅 表示了一个塔tw。
79.中央机械手cr例如能够从基板载置部110向各处理单元10一张一张地 搬运基板w,并且能够从各处理单元10向基板载置部110一张一张地搬运 基板w。另外,例如,中央机械手cr能够根据需要在多个处理单元10之 间一张一张地搬运基板w。分度器机械手ir和中央机械手cr是在每个容 纳架c和处理单元10之间搬运基板w的搬运部(搬运机械手)。
80.在图1的例子中,分度器机械手ir具有俯视呈u字状的手部h。在此, 分度器机械手ir具有两个手部h。两个手部h配置于相互不同的高度。各 手部h能够以水平的姿势支撑基板w。分度器机械手ir能够使手部h在水 平方向以及铅垂方向上移动。作为使分度器机械手ir移动的移动机构,可以 采用例如滚珠螺杆机构。
81.而且,分度器机械手ir通过以沿着铅垂方向的轴为中心进行旋转(自 转),能够改变手部h的朝向。作为使分度器机械手ir旋转的旋转机构, 可以采用例如马达。
82.分度器机械手ir在通过交接位置(图1中绘制有分度器机械手ir的 位置)的路径上沿着排列方向d移动。交接位置是在俯视时分度器机械手 ir和基板载置部110在与排列方向d正交的方向上相对的位置。分度器机械 手ir能够使手部h分别与任意的容纳架c以及基板载置部110相对。在此, 例如,分度器机械手ir通过使手部h移动,从而能够进行将基板w搬入容 纳架c的搬入动作,以及将基板w从容纳架c搬出的搬出动作。另外,例 如,分度器机械手ir通过在交接位置使手部h移动,从而能够进行将基板 w搬入基板载置部110的搬入动作,以及将基板w从基板载置部110搬出 的搬出动作。
83.在图1的例子中,与分度器机械手ir同样地,中央机械手cr具有俯视 呈u字状的手部h。在此,中央机械手cr具有两个手部h。两个手部h配 置于相互不同的高度。各手部h能够以水平的姿势支撑基板w。中央机械手 cr能够使各手部h在水平方向以及铅垂方向上移动。
84.而且,中央机械手cr通过以沿着铅垂方向的轴为中心旋转(自转), 能够改变手部h的朝向。作为使中央机械手cr旋转的旋转机构,可以采用 例如马达。中央机械手cr在俯视时被多台处理单元10包围。中央机械手c r能够使手部h与任意的处理单元10以及基板载置部110中的任一个相对。
85.此处,例如,中央机械手cr通过使手部h移动,从而能够进行将基板 w搬入各处理单元10的搬入动作,以及将基板w从各处理单元10搬出的 搬出动作。另外,例如,中央机械手cr通过使手部h移动,从而能够进行 将基板w搬入基板载置部110的搬入动作,以及将基板w从基板载置部11 0搬出的搬出动作。
86.未处理的基板w由分度器机械手ir从容纳架c取出,并经由基板载置 部110交接到中央机械手cr。中央机械手cr将该未处理的基板w搬入处 理单元10。处理单元10对基板w进行处理。已处理的基板w由中央机械 手cr从处理单元10取出,再根据需要经由其他处理单元10之后,经由基 板载置部110交接到分度器机械手ir。分度器机械手ir将已处理的基板w 搬入容纳架c。由此,进行对基板w的处理。
87.如图2所示,各处理单元10包括例如处理腔室11、基板保持部12、喷 嘴13以及杯14。处理腔室11形成有处理室,容纳基板保持部12、喷嘴13 以及杯14。
88.基板保持部12将基板w保持为水平姿势。此处,所指水平姿势是,基 板w的法线沿
着铅垂方向的姿势。另外,基板保持部12使基板w以通过基 板w的中心部并沿着铅垂方向延伸的旋转轴线为中心旋转。基板保持部12 也被称为旋转卡盘。基板保持部12可以由多个销保持基板w的端部,也可 以通过真空吸附保持基板w的背面。
89.喷嘴13向由基板保持部12保持的基板w的主面喷出处理液。若处理液 着落到旋转中的基板w的主面,则处理液受到离心力在基板w的主面上向 外侧流动,从基板w的周缘向外侧飞散。由此,进行对基板w的处理。另 外,喷嘴13也可以喷出多种处理液。例如喷嘴13经由多个配管与多个处理 液供给源连接。另外,在各配管上设置有阀。通过控制各阀的开闭,能够切 换多种处理液从喷嘴13喷出。另外,处理单元10也可以设置多个喷嘴13。
90.杯14具有包围基板保持部12的筒状的形状,接收从基板w的周缘飞散 的处理液。
91.此处,属于基板处理装置100的多个处理单元10分别分类为多个用途中 的一种用途。作为具体的一例,各处理单元10分类为半导体器件等产品的制 造工序中的、初期工序用的处理单元10和中期工序用的处理单元10中的一 种。初期工序被称为前道工序(front end of line,feol),中期工序被 称为中道工序(middle end of line,meol)。
92.feol用的处理单元10和meol用的处理单元10在包括处理腔室11、 基板保持部12、喷嘴13以及杯14方面是共通的,但是更详细的结构可能彼 此不同。例如,feol用的处理单元10中的基板保持部12的结构可以与m eol用的处理单元10中的基板保持部12的结构不同。另外,feol用的处 理单元10和meol用的处理单元10也可以在喷嘴13的数量、形状和可以 向基板w供给的处理液的种类等诸多条件上不同。
93.向feol用的处理单元10搬入基板w,该处理单元10对基板w进行f eol用的处理。feol用的处理包括使用例如是氢氟酸(hf)、氨双氧水混 合液(sc
‑
1)、盐酸双氧水混合液(sc
‑
2)等的处理液的标准清洁处理等。 向meol用的处理单元10搬入基板w,该处理单元10对基板w进行me ol用的处理。meol用的处理包括使用例如稀氢氟酸(dhf)、sc
‑
2等的 处理液的含金属基板清洗处理、聚合物去除处理等。
94.如图1所示,基板处理装置100设置有用户界面94。用户界面94包括 显示器95和输入器件96。显示器95是例如液晶显示器等的显示器。显示器 95由控制部90控制,显示各种信息。输入器件96是例如键盘和鼠标等的输 入器件。输入器件96将用户输入的信息输出至控制部90。用户使用输入器 件96,能够向基板处理装置100输入各种信息。例如,用户使用输入器件9 6,能够向基板处理装置100指示开始动作。
95.控制部90能够控制例如基板处理装置100所具备的各部的动作。图3 是概略地表示基板处理装置100的电结构的一例的框图。控制部90与分度器 机械手ir、中央机械手cr和多个处理单元10电连接,控制其动作。另外, 控制部90还与用户界面94电连接,使用用户界面94(具体来说显示器95) 向用户通知各种信息,或者,接收输入到用户界面94(具体来说输入器件9 6)的各种信息。
96.作为控制部90的硬件的结构与一般的计算机相同。即,控制部90具备: cpu等的数据处理部91,进行各种运算处理;读取专用的存储器即只读存储 器(read only memory,rom),存储基本程序;磁盘等非临时性存储介 质92,存储控制用软件或数据等;以及自由读写的存储器即随机存取存储器 (random access memory,ram)等临时性存储介质93,存储各种信息。 通过控制部90的数据处理部91处理规定的处理程序,基板处理装置100的 各动作机构由控制部90控制,进行基板处理装置100中的处理。另外,控制 部90也可以由不需要
软件来实现功能的专用硬件电路来实现。
97.<仿真处理>
98.各处理单元10除了对基板w进行上述的处理之外,还可以进行仿真处 理。仿真处理是使用与基板w不同的仿真基板dw的处理。仿真基板dw 具有与基板w相同的形状(例如圆板形状),例如其直径与其几乎相同。但 是,与基板w不同,仿真基板dw不是实际用于制造产品的制造用的基板。
99.在进行仿真处理时,仿真基板dw被搬入处理单元10。然后,处理单元 10一边由基板保持部12旋转仿真基板dw,一边从喷嘴13向仿真基板dw 的主面喷出处理液(例如纯水等的清洗液)(仿真处理)。由此,例如,处 理单元10被清洗。通过将仿真基板dw保持在处理单元10内的基板保持部 12的状态下进行仿真处理,与基板保持部12未保持任何基板的状态比较, 能够进行各种处理单元10内的清洗。例如,为使清洗液到达处理单元10内 的特定位置,能够将仿真基板dw保持于基板保持部12,向仿真基板dw供 给清洗液。
100.<仿真基板容纳器>
101.仿真基板dw可以容纳于由装载埠lp保持的可搬型的容纳架c内(还 参照图1)。在图1的例子中,由于设置有四个装载埠lp,因此保持四个容 纳架c。也可以在这四个容纳架c中的一个容纳架c内容纳多个仿真基板d w。该情况下,分度器机械手ir和中央机械手cr在该容纳架c和各处理单 元10之间搬运仿真基板dw。
102.但是,该情况下,一个装载埠lp被仿真基板dw占用。由此,处理基 板w的处理能力可能降低。
103.因此,在图2的例子中,也可以在基板处理装置100中设置有与装载埠 lp不同的容纳仿真基板dw的仿真基板容纳器bf。仿真基板容纳器bf是 固定型容纳器,例如,配置在基板载置部110的上方空间内。作为具体的一 例,仿真基板容纳器bf设置在与基板载置部110在铅垂方向上相对的位置。
104.例如与容纳架c相同地,仿真基板容纳器bf以水平姿势且沿着铅垂方 向排列的状态容纳多个仿真基板dw。另外,仿真基板容纳器bf具有在俯 视时在中央机械手cr侧开口的箱型形状。
105.中央机械手cr能够升降手部h,并且能够将手部h移动至与仿真基板 容纳器bf在水平方向上相对的高度位置。中央机械手cr通过移动手部h, 能够进行向仿真基板容纳器bf搬入基板w的搬入动作和从仿真基板容纳器 bf搬出基板w的搬出动作。
106.中央机械手cr在仿真基板容纳器bf和各处理单元10之间搬运仿真基 板dw。具体来说,中央机械手cr使手部h移动至与仿真基板容纳器bf 相对的高度位置。然后,中央机械手cr使手部h移动,从仿真基板容纳器bf搬出仿真基板dw,将该仿真基板dw搬入处理单元10。该处理单元10 对仿真基板dw进行仿真处理。若仿真处理结束,则由中央机械手cr从处 理单元10搬出仿真基板dw。中央机械手cr使载置有仿真基板dw的手部 h,移动至与仿真基板容纳器bf相对的高度位置,使手部h移动向仿真基 板容纳器bf搬入仿真基板dw。
107.这样,在使用仿真基板容纳器bf中容纳的仿真基板dw的情况下,在 装载埠lp上可以载置仅容纳有产品用的基板w的容纳架c。由此,能够避 免处理的处理能力降低。
108.<处理单元的种类>
109.如上所述,属于基板处理装置100的多个处理单元10分别被分类为,f eol用的处
理单元10和meol用的处理单元10中的一种。在半导体器件 等的产品的制造工序中,由于在基板w的主面依次形成各种薄膜,因此fe ol中的基板w的主面的膜结构和meol中的基板w的主面的膜结构彼此 不同。因此,搬入feol用的处理单元10和meol用的处理单元10的基板 w的主面的膜结构彼此不同。
110.另外,有时feol用的处理单元10向基板w供给的处理液的种类和m eol用的处理单元10向基板w供给的处理液的种类彼此不同。
111.如上所述,分别搬入用途不同的处理单元10的基板w的主面的膜结构 彼此不同,另外,用途不同的处理单元10分别向基板w供给的处理液的种 类也彼此不同,因此在用途不同的处理单元10内产生的污染(例如颗粒)种 类也彼此不同。
112.此处,考虑对于不同用途的处理单元10共同地使用一个仿真基板dw 的情况。若仿真基板dw被搬入一个用途的处理单元10进行仿真处理,则 仿真基板dw因该仿真处理而略微污染。该污染的仿真基板dw被搬入另一 个用途的处理单元10进行仿真处理,从而仿真基板dw的污染可能向另一 个用途的处理单元10的内部扩散。即,一个用途的处理单元10中的污染经 由仿真基板dw可能向另一个用途的处理单元10扩散。有时在不同的用途 下产生的污染很难通过仿真处理去除,这种污染的扩散不是理想的。
113.因此,在本实施方式中,如下所述,可以单独地设定能够用于各处理单 元10的仿真基板dw。
114.此外,输入器件96可以接收仿真处理相关的各种设定的输入。例如,输 入器件96可以接收用于设定能够用于各处理单元10的仿真基板dw的输入。 以下,说明基板处理装置100的动作的一例。
115.<动作>
116.图4是表示基板处理装置100的动作的一例的流程图。首先,控制部90 基于用户的输入,进行仿真处理相关的各种设定(步骤s1:设定工序)。图 5是表示设定工序的具体的一例的流程图。首先,控制部90使显示器95显 示设定用的第一设定画面(步骤s11)。图6是概略地表示第一设定图像的 一例的图。根据该第一设定图像的显示,能够将仿真处理的各种设定相关的 信息输入至输入器件96。
117.<对应关系信息>
118.首先,描述对处理单元10的每一个设置容纳在容器(容纳架c或仿真 基板容纳器bf)中的多个仿真基板dw中的能够使用的仿真基板dw的方 法。如下详述,用户使用输入器件96输入每个处理单元10能够使用的仿真 基板dw的信息。输入器件96将输入信息输出到控制部90。基于来自输入 器件96的信息,控制部90作成表示+能够使用于每个处理单元10的仿真基 板dw的对应关系信息作为设定信息之一(步骤s12)。
119.在本实施方式中,作为能够使用的仿真基板dw的设定方法的一例,导 入处理类别来说明。处理类别是,用于区别处理单元10的类别,作为具体的 一例包括“feol”和“meol”两个类别。在本实施方式中,如下所述,对 每个处理单元10设定处理类别,对每个仿真基板dw设定处理类别。在该 处理单元10中能够使用与处理单元10属于相同的处理类别的仿真基板dw。
120.图6例示的第一设定图像中显示有表,作为其项目显示有“处理单元
”ꢀ
和“处理类别”。在“处理单元”的项目中,作为属于基板处理装置100的 全部的处理单元10,纵向排列
地显示有处理单元10a、10b、
···
,10h。 在“处理类别”的项目中,与各处理单元10一一对应地,纵向排列地显示有 处理类别(此处,“feol”或“meol”)。
121.在图6例示的第一设定图像中,显示有用于输入各处理单元10的处理类 别的输入要素m11。图6的例子中,多个输入要素m11与处理单元10a到 处理单元10h一一对应地设置,例如是组合框。若用户使用输入器件96,操 作(例如点击)与各处理单元10对应的输入要素m11,则在显示器95显示 可选择的处理类别的列表(未图示)。此处,在显示器95中显示“feol
”ꢀ
和“meol”。当用户使用输入器件96选择该列表中的一个时,该信息从输 入器件96输出至控制部90。控制部90基于该信息,将对应的处理单元10 的处理类别设定为选择的处理类别。
122.用户对全部的处理单元10进行上述的操作,从而控制部90能够对全部 的处理单元10设定处理类别。具体来说,控制部90生成将处理单元10和处 理类别关联的单元设定信息。
123.在图6的例子中,在处理单元10a到处理单元10f的处理类别设定有“f eol”,在处理单元10g到处理单元10h的处理类别设定有“meol”。
124.在图6例示的第一设定图像中还显示有输入要素m12。输入要素m12 是用于显示后述的第二设定图像的输入要素。输入要素m12例如是按键(也 称为软键。以下,相同。)。若用户使用输入器件96操作(例如点击)第一 设定图像的输入要素m12,则控制部90响应该操作结束在显示器95中显示 第一设定图像,并显示第二设定图像。
125.第二设定图像是用于设定各仿真基板dw的处理类别的画面。图7是概 略地表示第二设定图像的结构的一例的图。在第二设定图像中也显示有表, 作为其项目显示有“插槽(slot)”和“处理类别”。“插槽”表示,在每个 容纳架c和仿真基板容纳器bf中,用于容纳各仿真基板dw的空间。此处 作为一例,容纳架c和仿真基板容纳器bf均可以容纳25张仿真基板dw。 在图7的例子中,在“插槽”的项目显示有“1”到“25”,作为用于识别插 槽的数字。各仿真基板dw容纳于各插槽,因此识别插槽的数字还作为用于 识别仿真基板dw的数字发挥作用。
126.在“处理类别”的项目中,与各插槽对应地,横向排列地显示有“feo l”和“meol”。“feol”和“meol”中的被设定的一个在背景中表示 有斜线的阴影。在图7的例子中,在与用“1”表示的插槽对应的处理类别中, 在“meol”上显示有阴影,因此在容纳于“1”的插槽的仿真基板dw上设 定“meol”作为处理类别。
[0127]“处理类别”的项目中显示有“meol”的各区域,作为用于输入“me ol”作为对应的仿真基板dw的处理类别的输入要素m13发挥作用,显示 有“feol”的各区域,作为用于输入“feol”作为对应的仿真基板dw的 处理类别的输入要素m14发挥作用。输入要素m13和输入要素m14例如是 按键。
[0128]
若用户使用输入器件96操作(例如点击)一个输入要素m13,则控制 部90响应该操作,将与该一个输入要素m13对应的仿真基板dw的处理类 别设定为“meol”。另外,若用户使用输入器件96操作(例如点击)一个 输入要素m14,则控制部90响应该操作,将与该一个输入要素m14对应的 仿真基板dw的处理类别设定为“feol”。
[0129]
在图7的例子中,在第二设定图像的表中,作为其项目显示有“是否存 在”。在“是否存在”的项目中显示在各插槽中是否存在仿真基板dw的信 息。在图7的例子中,存在仿真
基板dw用黑圆圈表示,不存在仿真基板d w用空栏表示。在图7的例子中,“21”的插槽中不存在仿真基板dw,其 他插槽中存在仿真基板dw。
[0130]
表示各插槽中仿真基板dw是否存在的信息,例如,可以由客户使用输 入器件96输入,或者,也可以在基板处理装置100设置检测容纳架c内仿 真基板dw是否存在的映射传感器,以及,检测仿真基板容纳器bf内仿真 基板dw是否存在的映射传感器。
[0131]
用户对存在仿真基板dw的全部的插槽操作输入要素m13或输入要素 m14,从而控制部90能够对全部的仿真基板dw设定处理类别。具体来说, 控制部90生成将仿真基板dw和处理类别关联的仿真基板设定信息。
[0132]
在图7的例子中,对容纳于“1”到“13”的插槽的仿真基板dw设定 有“meol”,对容纳于“14”到“20”、“22”到“25”的插槽的仿真基 板dw设定有“feol”。
[0133]
在第二设定图像中还显示有输入要素m91。输入要素m91是用于返回 第一设定图像的输入要素,例如按键。若用户使用输入器件96操作(例如点 击)输入要素m91,则控制部90响应该操作,结束在显示器95中显示第二 设定图像,并重新显示第一设定图像。
[0134]
参照图6,在第一设定图像中还显示有输入要素m92。输入要素m92是 用于确定设定信息的输入要素,例如按键。若用户使用输入器件96操作(例 如点击)输入要素m92,则控制部90响应该操作使设定信息(例如对应关 系信息)存储于存储介质92。更具体来说,控制部90使表示处理单元10和 处理类别的对应关系的单元设定信息以及表示插槽和处理类别的对应关系 (即,仿真基板dw和处理类别的对应关系)的仿真基板设定信息存储于存 储介质92。由此,确定对应关系信息(单元设定信息和仿真基板设定信息)。
[0135]
这种对应关系信息中,经由处理类别设定能够使用于处理单元10的仿真 基板dw。更具体来说,处理单元10中,能够使用属于与该处理单元10的 处理类别相同的处理类别的仿真基板dw。在图6的例子中,处理单元10a 的处理类别是“feol”。另外,在图7的例子中,对容纳于“14”到“20”、
ꢀ“
22”到“25”的插槽的仿真基板dw设定有“feol”的处理类别。因此, 在处理单元10a的仿真处理中,可以使用容纳于“14”到“20”、“22”到
ꢀ“
25”的插槽的仿真基板dw。在该例子中,设定有多个仿真基板dw作为 能够使用于处理单元10a的仿真基板dw。
[0136]
参照图5,在设定工序中,也可以进行生成与对应关系信息不同的设定 信息的步骤s13到步骤s16,关于这些在后面详述。
[0137]
参照图4,设定工序(步骤s1)之后,控制部90对各个处理单元10判 断仿真处理的开始条件是否成立(步骤s2)。以下,在说明仿真处理的开始 条件的例子时,导入处理单元10不进行仿真处理就能够对基板w进行处理 的寿命(life)。在各处理单元10的寿命耗尽时,控制部90判断需要对该处 理单元10进行仿真处理。即,判断寿命耗尽时开始条件成立。
[0138]
作为表示寿命的具体的指标,例如,可以采用以下说明的寿命张数。寿 命张数是指,处理单元10在前次的仿真处理以后处理的基板w的处理张数。 随着寿命张数增加,寿命减少。例如,控制部90判断在寿命张数成为规定的 寿命设定张数以上时,寿命耗尽。
[0139]
作为具体的动作的一例,控制部90每当在中央机械手cr将基板w搬 入处理单元10时,对该处理单元10的寿命张数进行计数。由此,能够对每 个处理单元10测量寿命张数。然后,控制部90对每个处理单元10判断从前 次的仿真处理之后的基板w的处理张数即寿命张数是否是规定的寿命设定 张数以上。控制部90在寿命张数是寿命设定张数以上时,判断该处理单元1 0的开始条件成立。
[0140]
或者,作为表示寿命的指标,也可以采用下面说明的寿命时间。寿命时 间是指,处理单元10没有继续对基板w进行处理的时间。即,寿命时间是 指,处理单元10没有执行基板w的处理,继续待机的时间。例如,控制部 90也可以在寿命时间成为规定的寿命设定时间以上时,判断寿命耗尽。
[0141]
作为具体的动作的一例,控制部90对每个处理单元10测量从对最后的 基板w的处理开始的经过时间作为寿命时间。该寿命时间的测量例如通过定 时器电路进行,例如,若向处理单元10搬入基板w,则定时器电路被初始 化。控制部90对每个处理单元10判断寿命时间是否是规定的寿命设定时间 以上。在寿命时间是寿命设定时间以上时,判断该处理单元10的开始条件成 立。
[0142]
对全部的处理单元10判断上述的开始条件未成立时,控制部90重新执 行步骤s2。
[0143]
当对某一处理单元10判断开始条件成立时,控制部90根据存储介质92 中存储的设定信息(即对应关系信息)特定能够使用于开始条件成立的处理 单元10的仿真基板dw(步骤s3:仿真基板特定工序)。
[0144]
图8是表示仿真基板特定工序的具体的一例的流程图。控制部90基于对 应关系信息特定属于与开始条件成立的处理单元10相同的处理类别的仿真 基板dw(步骤s31)。例如,当处理单元10a的开始条件成立时,控制部 90将属于与处理单元10a的处理类别(图6中是“feol”)相同的处理类 别的仿真基板dw中的一个,特定为能够使用于处理单元10a的仿真基板d w。在图7的例子中,“14”到“20”、“22”到“25”的插槽的处理类别 被设定为与处理单元10a的处理类别相同的“feol”。即,能够使用容纳 于“14”到“20”、“22”到“25”的插槽的仿真基板dw。
[0145]
因此,控制部90可以将容纳于“14”到“20”、“22”到“25”的插槽 中的任一个插槽的仿真基板dw特定为用于处理单元10a的仿真处理的仿真 基板dw。例如,控制部90特定这些仿真基板dw中的使用次数最少的仿 真基板dw(步骤s32)。例如,每当在将仿真基板dw搬入处理单元10 时,计数与该仿真基板dw对应的使用次数来测量仿真基板dw的使用次数。 特定使用次数最少的仿真基板dw,从而能够抑制各仿真基板dw的使用次 数的偏差。即,可以更均匀地使用多个仿真基板dw。由此,可以对齐各仿 真基板dw的更换时期。
[0146]
重新参照图4,基板处理装置100在开始条件成立的处理单元10中进行 仿真处理(步骤s4:仿真处理工序)。此处,作为一例,使用仿真基板容纳 器bf中容纳的仿真基板dw。中央机械手cr在仿真基板特定工序中从仿真 基板容纳器bf搬出特定的仿真基板dw,将该仿真基板dw搬入开始条件 成立的处理单元10中。该处理单元10的基板保持部12保持仿真基板dw, 使仿真基板dw旋转。然后,该处理单元10从喷嘴13向仿真基板dw喷出 处理液。由此,进行仿真处理。通过该仿真处理,例如,能够清洗该处理单 元10的内部。
[0147]
如上所述,在本实施方式中,在各处理单元10中搬入自身能够使用的仿 真基板dw,各处理单元10使用自身能够使用的仿真基板dw进行仿真处 理。作为更具体的一例,在处理单元10中搬入属于与该处理单元10的处理 类别相同的处理类别的仿真基板dw作为能够使用的仿真基板dw。换言之, 在属于不同的处理类别的处理单元10中不搬入相同的仿真基板dw。因此, 能够避免属于不同的处理类别的处理单元10之间的经由仿真基板dw的污 染的扩散。
[0148]
另外,在上述的例子中,使用处理类别间接地设定处理单元10和仿真基 板dw的对
应关系。由此,容易设定处理单元10和仿真基板dw的对应关 系。
[0149]
为了比较,考虑对每个处理单元10直接设定能够使用的多个仿真基板d w的情况。该情况下,在上述的例子中,用户对处理单元10a依次输入“1 4”到“20”、“21”到“25”的插槽(11个插槽),因此对处理单元10a 需要进行11次输入。用户对各个处理单元10b到处理单元10f依次输入相 同的插槽。因此,对处理单元10a到处理单元10f总计需要进行66(=6
×
11) 次的输入。另外,用户对各个处理单元10g到处理单元10h依次输入“1
”ꢀ
到“13”的插槽(13个插槽)。由此,对处理单元10g到处理单元10h,总 计需要进行78(=6
×
13)次的输入。
[0150]
与此相对,若使用处理类别间接地设定处理单元10和仿真基板dw的 对应关系,则各个处理单元10和仿真基板dw只设定一个处理类别即可。 据此,只要输入处理单元10的数量(例如12)和容纳器内存在的仿真基板 dw的数量(例如24)之和(例如36)的输入次数即可。因此,能够简化输 入作业。由此,能够降低作业错误。另外,由于容易理解对应关系,因此也 容易输入和检查。
[0151]
<其他设定信息>
[0152]
以下,叙述仿真处理相关的其他设定信息。
[0153]
<仿真基板的容纳器设定>
[0154]
在图2的例子中,在基板处理装置100设置有仿真基板容纳器bf。由此, 仿真处理中可以使用仿真基板容纳器bf内的仿真基板dw。一方面,在将 容纳仿真基板dw的容纳架c搬入装载埠lp的情况下,也可以将该容纳架 c内的仿真基板dw使用于仿真处理。
[0155]
因此,控制部90也可以基于用户的输入设定容纳仿真处理中使用的容纳 仿真基板dw的容纳器(步骤s13:图5)。换言之,输入器件96也可以接 收用于指定仿真处理中使用的容纳器的输入。更具体来说,输入器件96可以 接收指定是否使用容纳于装载埠lp上载置的可搬型的容纳架c和固定型的 仿真基板容纳器bf中的任一个的多个仿真基板dw的输入。
[0156]
在图6的例子中,第一设定图像显示有输入要素m2。输入要素m2是 用于输入用于仿真处理的容纳器的输入要素。在图6的例子中,输入要素m 2包括输入要素m21到输入要素m25。输入要素m21到输入要素m24分别 显示有“lp1”、“lp2”、“lp3”以及“lp4”,分别表示装载埠lp。输 入要素m25显示有“bf”,表示仿真基板容纳器bf。
[0157]
若用户使用输入器件96,操作(例如点击)输入要素m21到输入要素 m25中的任一个,则控制部90响应该操作,将仿真处理中使用的容纳器设 定为操作的一个输入要素。具体来说,控制部90生成表示仿真处理中使用的 容纳器的容纳器信息。
[0158]
在图6的例子中,输入要素m25带有阴影。这表示,仿真基板容纳器b f被设定为仿真处理中使用的容纳器。
[0159]
确定容纳器的设定时,用户使用输入器件96,例如操作输入要素m92。 控制部90响应该输入要素m92的操作,将表示仿真处理中使用的容纳器的 容纳器信息存储于存储介质92作为设定信息之一。
[0160]
如上所述,用户能够输入仿真处理中使用的容纳器。
[0161]
控制部90在进行仿真处理时,基于存储介质92中存储的容纳器信息控 制分度器机械手ir和中央机械手cr。在用容纳器信息表示的容纳器是装载 埠lp时,控制部90使分度器机械手ir从用容纳器信息表示的装载埠lp中 保持的容纳架c搬出仿真基板dw,经由中央机械手cr将该仿真基板dw 搬入处理单元10。若在该处理单元10中仿真处理结束,则中央机
械手cr 和分度器机械手ir协作,将仿真基板dw返回到原来的容纳架c内的原来 的位置。
[0162]
当用容纳器信息表示的容纳器是仿真基板容纳器bf时,控制部90使中 央机械手cr从仿真基板容纳器bf搬出仿真基板dw,将该仿真基板dw 搬入处理单元10。若在该处理单元10中仿真处理结束,则中央机械手cr 将仿真基板dw返回到仿真基板容纳器bf内的原来的位置。
[0163]
如上所述,能够设定仿真处理中使用的仿真基板dw的容纳器。由此, 能够提高基板处理装置100的可用性。
[0164]
<仿真处理的开始条件>
[0165]
在上述的例子中,控制部90对每个处理单元10判断寿命时间是否是寿 命设定时间以上,当寿命时间是寿命设定时间以上时,判断该处理单元10 的仿真处理的开始条件成立。以下,将该开始条件称为第一开始条件。
[0166]
另外,在上述的例子中,控制部90对各个处理单元10判断寿命张数是 否是寿命设定张数以上,当寿命张数是寿命设定张数以上时,判断该处理单 元10的仿真处理的开始条件成立。以下,将该开始条件称为第二开始条件。
[0167]
控制部90也可以基于用户的输入,设定仿真处理的开始条件(步骤s1 4:图5)。换言之,输入器件96也可以接收用于指定仿真处理的开始条件 的输入。更具体来说,输入器件96可以接收用于将第一开始条件和第二开始 条件中的至少一个指定为开始条件的输入。
[0168]
若用户使用输入器件96,输入第一开始条件和第二开始条件中的至少一 个,则控制部90将输入的开始条件设定为各处理单元10的仿真处理的开始 条件。
[0169]
此处,作为一例,通过将第一开始条件中使用的寿命设定时间设定为大 于0的值,来设定第一开始条件,通过将第二开始条件中使用的寿命设定张 数设定为大于0的值,来设定第二开始条件。以下,叙述具体的一例。
[0170]
在图6的例子中,在第一设定图像的表中,作为其项目显示有“寿命设 定时间”和“寿命设定张数”。在图6的例子中,在“寿命设定时间”的项 目中,与处理单元10a到处理单元10h一一对应地纵向排列地显示有寿命设 定时间ta到寿命设定时间th。另外,在图6的例子中,在“寿命设定张数
”ꢀ
的项目中,与处理单元10a到处理单元10h一一对应地纵向排列地显示有寿 命设定张数na到寿命设定张数nh。
[0171]
寿命设定时间大于0是指,采用第一开始条件作为该处理单元10的开始 条件。即,用户使用输入器件96将寿命设定时间设定为大于0的值,从而能 够对对应的处理单元10设定第一开始条件。
[0172]
相同地,寿命设定张数大于0是指,采用第二开始条件作为该处理单元 10的开始条件。即,用户使用输入器件96将寿命设定张数设定为大于0的 值,从而能够对对应的处理单元10设定第二开始条件。
[0173]
在图6中,显示有各个寿命设定时间ta到寿命设定时间th的区域, 作为用于输入寿命设定时间的输入要素m31发挥作用。若用户使用输入器件 96操作(例如点击)一个输入要素m31,则能够输入与该一个输入要素m3 1对应的寿命设定时间。若在该状态下用户使用输入器件96输入寿命设定时 间,则控制部90将输入的时间设定为与该一个输入要素m31对应的处理单 元10的寿命设定时间。
[0174]
若用户对全部的处理单元10输入寿命设定时间,则控制部90能够设定 全部的处理单元10的寿命设定时间。
[0175]
另外,显示有各个寿命设定张数na到寿命设定张数nh的区域,作为 用于输入寿命设定张数的输入要素m32发挥作用。若用户使用输入器件96 操作(例如点击)一个输入要素m32,则能够输入与该一个输入要素m32 对应的寿命设定时间。若在该状态下用户使用输入器件96输入寿命设定张 数,则控制部90将输入的张数设定为与该一个输入要素m32对应的处理单 元10的寿命设定张数。
[0176]
若用户对全部的处理单元10输入寿命设定张数,则控制部90能够设定 全部的处理单元10的寿命设定张数。
[0177]
确定寿命设定时间和寿命设定张数的设定时,用户使用输入器件96操作 例如输入要素m92。控制部90响应该输入要素m92的操作,将与处理单元 10对应的表示寿命设定时间和寿命设定张数的寿命信息存储于存储介质92 作为设定信息之一。
[0178]
如上所述,能够对每个处理单元10设定寿命设定时间和寿命设定张数。
[0179]
控制部90在进行仿真处理的开始条件是否成立的判断(步骤s2:图4) 时,首先从存储介质92读取寿命信息。控制部90基于该寿命信息,对每个 处理单元10判断仿真处理的开始条件是否成立。例如,在处理单元10a的 寿命设定时间ta大于0时,控制部90测量处理单元10a的寿命时间ta, 判断寿命时间ta是否是处理单元10a的寿命设定时间ta以上。然后,控 制部90在寿命时间ta是寿命设定时间ta以上时,判断处理单元10a的仿 真处理的开始条件成立。对处理单元10b到处理单元10h也进行相同的判断。
[0180]
另外,在处理单元10a的寿命设定张数na大于0时,控制部90测量 处理单元10a的寿命张数na,判断寿命张数na是否是处理单元10a的寿 命设定张数na以上。然后,控制部90在寿命张数na是寿命设定张数na 以上时,也判断处理单元10a的仿真处理的开始条件成立。对处理单元10b 到处理单元10h也进行相同的判断。
[0181]
如上所述,由于能够设定第一开始条件和第二开始条件作为开始条件, 因此能提高基板处理装置100的可用性。另外,在上述的例子中,由于能够 对每个处理单元10设定寿命设定时间和寿命设定张数,因此能够对处理单元 10设定适当的寿命设定时间和寿命设定张数。
[0182]
另外,在上述的例子中,通过将寿命设定时间设定为大于0的值来设定 第一开始条件,通过将寿命设定张数设定为大于0的值来设定第二开始条件, 但是也可以在第一设定图像中显示用于设定开始条件的专用的输入要素。例 如,也可以在第一设定图像中显示用于输入第一开始条件的输入要素以及用 于输入第二开始条件的输入要素作为开始条件。
[0183]
<寿命时间和寿命张数的显示>
[0184]
在图6的例子中,在第一设定图像的表中,作为其项目显示有“寿命时 间”和“寿命张数”。在“寿命时间”的项目中,对每个处理单元10显示当 前时刻的寿命时间和寿命设定时间。例如,与处理单元10a对应地,通过“/
”ꢀ
并排显示寿命时间ta和寿命设定时间ta。对处理单元10b到处理单元10h 也相同。
[0185]
在显示器95中,对每个处理单元10显示当前时刻的寿命时间和寿命设 定时间,因此用户能够对每个处理单元10预测执行仿真处理的时刻。
[0186]
另外,在“寿命张数”的项目中,对每个处理单元10显示有当前时刻的 寿命张数和寿命设定张数。例如,与处理单元10a对应地,通过“/”并排显 示寿命张数na和寿命设定张数na。对处理单元10b到处理单元10h也相 同。
[0187]
在显示器95中,显示有当前时刻的寿命张数和寿命设定张数,因此用户 能够对每个处理单元10预测执行仿真处理的时刻。
[0188]
<仿真流程规程>
[0189]
仿真处理的内容(以下,称为仿真处理规程)可以根据每个处理单元10 不同。例如,feol用的处理单元10的仿真处理规程可以与meol用的处 理单元10的仿真处理规程不同。仿真处理规程是规定仿真处理中的步骤的信 息,例如,包括规定从喷嘴13喷出的处理液的种类、处理液的喷出时间和基 板w的旋转速度等的仿真处理的各种条件的信息。
[0190]
若对每个处理单元10设定仿真处理规程,则能够对各自设定适合的仿真 处理规程。
[0191]
另外,在上述的例子中,分度器机械手ir包括多个(例如两个)手部h, 中央机械手cr也包括多个(例如两个)手部h。在仿真基板dw的搬运中, 可以使用任一手部h,但是用于仿真基板dw的搬运的手部h也可以按照处 理类别不同。
[0192]
具体来说,在中央机械手cr在feol用的仿真基板dw的搬运中使用 一只手部h的情况下,在meol用的仿真基板dw的搬运中可以使用另一 只手部h。图9是表示手部h和处理类别的对应关系的一例的图。在图9的 例子中,在feol用的仿真基板dw的搬运中,使用上侧的手部h1(参照 图2)作为一只手部h,在meol用的仿真基板dw的搬运中,使用下侧的 手部h2(参照图2)作为另一只手部h。
[0193]
据此,即使仿真基板dw中产生的污染因与该仿真基板dw接触而扩散 到手部h,该手部h的污染也不会扩散到处理类别不同的仿真基板dw。这 是因为,该手部h不用于处理类别不同的仿真基板dw的搬运。即,能够避 免不同的处理类别的处理单元10之间的经由手部h的污染的扩散。
[0194]
在使用容纳架c内的仿真基板dw的情况下,分度器机械手ir也相同 地,可以按照处理类别在仿真基板dw的搬运中使用不同的手部h(还参照 图9)。
[0195]
以下,导入仿真流程规程作为包括仿真处理规程和基板搬运条件的规程。 在基板搬运条件中包括在仿真基板dw的搬运中使用哪个手部h的信息。
[0196]
控制部90也可以基于用户的输入设定仿真流程规程(步骤s15:图5)。 即,输入器件96也可以接收仿真流程规程(仿真处理规程和基板搬运条件) 的输入。
[0197]
在图6的例子中,在第一设定图像的表中,作为其项目显示有“仿真流 程规程”。仿真流程规程是指规定进行仿真处理时的基板处理装置100中的 一系列的动作步骤的规程,包括仿真处理规程和基板搬运条件。在图6的例 子中,在“仿真流程规程”的项目中,与处理单元10a到处理单元10h一一 对应地,纵向排列地显示有仿真流程规程fra到仿真流程规程frh。
[0198]
显示各个仿真流程规程fra到仿真流程规程frh的区域作为用于输入 仿真流程规程的输入要素m4发挥作用。若用户使用输入器件96操作(例如 点击)一个输入要素m4,则能够输入与该一个输入要素m4对应的仿真流 程规程。若在该状态下用户使用输入器件96输入仿真流程规程,则控制部9 0将输入的仿真流程规程设定为与该一个输入要素m4对应的
处理单元10的 仿真流程规程。
[0199]
另外,仿真流程规程中包括的仿真处理规程可以是规定对基板w的处理 步骤的处理规程,或者,也可以是仿真处理中专用的处理规程。
[0200]
用户使用输入器件96对每个处理单元10输入仿真流程规程,从而按照 处理类别设定仿真基板dw的搬运中使用的手部h。换言之,用户对每个处 理单元10输入仿真流程规程,从而使得向feol用的处理单元10的仿真基 板dw的搬运中使用的手部h和向meol用的处理单元10的仿真基板dw 的搬运中使用的手部h彼此不同。
[0201]
在确定仿真流程规程的设定时,用户使用输入器件96例如操作输入要素 m92。控制部90响应该输入要素m92的操作,将表示与处理单元10对应的 仿真流程规程的流程规程信息存储于存储介质92作为设定信息之一。
[0202]
如上所述,能够对每个处理单元10设定仿真流程规程。
[0203]
控制部90在仿真处理的开始条件成立时,从存储介质92读取流程规程 信息,基于仿真处理的开始条件成立的处理单元10的仿真流程规程控制基板 处理装置100。由此,由基板搬运条件中规定的手部h搬运仿真基板dw, 在处理单元10中进行仿真处理规程中规定的仿真处理。例如,在处理单元1 0a的开始条件成立时,由feol用的手部h从容纳器搬出feol用的仿真 基板dw,将该仿真基板dw搬入处理单元10a中,处理单元10a根据fe ol用的仿真处理规程进行仿真处理。若仿真处理结束,则由feol用的手 部h将仿真基板dw返回到原来的容纳器的原来的位置。
[0204]
据此,能够进行适合feol用的处理单元10a的仿真处理。另外,由f eol用的手部h搬运feol用的仿真基板dw,因此能够避免属于不同的处 理类别的处理单元10之间的经由手部h的污染的扩散。
[0205]
<仿真处理张数>
[0206]
有时预先决定能够在仿真流程规程中规定的处理内容(步骤)的数的最 大值。该情况下,不能在仿真流程规程中规定超过最大值的步骤数。此处, 为了以超过这种最大值的步骤数进行仿真处理,基板处理装置100可以连续 多次地执行与仿真流程规程相应的一系列的动作。
[0207]
图10是表示仿真处理工序的一例的时序图。在图10的例子中,表示有 处理单元10a中的仿真处理工序的时序图。
“→
10a”所示的块表示仿真基 板dw从容纳器搬运到处理单元10a的期间,“dp”所示的块表示在处理 单元10a中进行仿真处理的期间,“10a
→”
所示的块(block)表示从处理 单元10a向容纳器搬运仿真基板dw的期间。该连续的三个期间表示根据处 理单元10a的仿真流程规程进行动作op的期间。在图10的例子中,在处理 单元10a的仿真处理工序中,连续2次进行动作op。即,连续地进行使用2 张仿真基板dw的仿真处理。
[0208]
这样,通过连续多次进行仿真处理,能够以总计超过最大值的步骤数进 行仿真处理。例如,在仿真流程规程中,规定有200个步骤的情况下,通过 执行3次该仿真流程规程,能够执行600个步骤。由此,能够进行必要的仿 真处理。更具体来说,例如,能够延长喷出处理液的总喷出时间,从而能够 适当地完成处理单元10a中的清洗处理。
[0209]
如上所述,基板处理装置100可以进行多次包括向处理单元10的仿真基 板dw的搬运、处理单元10中的仿真处理以及向容纳器的仿真基板dw的 搬运的一系列的动作op。
[0210]
因此,控制部90可以基于用户的输入设定动作op的连续次数(即,仿 真处理中使用的仿真基板dw的处理张数)(步骤s16:图5)。即,输入 器件96也可以接收仿真处理中使用的仿真基板dw的处理张数(以下,称 为处理张数设定值)的输入。
[0211]
在图6的例子中,在第一设定图像的表中,作为其项目显示有“处理张 数设定值”。在图6的例子中,在“处理张数设定值”的项目中,与处理单 元10a到处理单元10h一一对应地,纵向排列地显示有处理张数设定值ma 到处理张数设定值mh。
[0212]
各个处理张数设定值ma到处理张数设定值mh表示的区域,作为用于 设定处理张数设定值的输入要素m5发挥作用。若用户使用输入器件96操作 (例如点击)一个输入要素m5,则能够输入与该一个输入要素m5对应的 处理张数设定值。若在该状态下用户使用输入器件96输入处理张数设定值, 则控制部90将输入的张数设定为与该一个输入要素m5对应的处理单元10 的处理张数设定值。
[0213]
在确定处理张数设定值的设定时,用户使用输入器件96例如操作输入要 素m92。控制部90响应该输入要素m92的操作,将表示与处理单元10对 应的处理张数设定值的仿真处理张数信息存储于存储介质92作为设定信息 之一。
[0214]
如上所述,能够对每个处理单元10设定处理张数设定值。
[0215]
控制部90在仿真处理的开始条件成立时,从存储介质92读取流程规程 信息和仿真处理张数信息。然后,控制部90基于仿真处理的开始条件成立的 处理单元10的仿真流程规程在基板处理装置100中仅重复执行处理张数设定 值次数的动作op。例如,在处理单元10a的开始条件成立时,基板处理装 置100仅重复执行与处理单元10a对应的处理张数设定值ma次数的与处理 单元10a对应的仿真流程规程。
[0216]
另外,基板处理装置100可以在仿真处理工序中将同一仿真基板dw仅 重复使用处理张数设定值次数,或者,也可以在该仿真处理工序中使用不同 的仿真基板dw。例如,说明与处理单元10a对应的处理张数设定值ma是 3张的情况。在仿真处理工序中,也可以重复使用feol用的一个仿真基板dw进行3次仿真处理。或者,也可以依次使用例如使用次数少的不同的三 个仿真基板dw连续地进行仿真处理。在使用不同的仿真基板dw的情况下, 可以更均匀地使用多个仿真基板dw。
[0217]
如上所述,对每个处理单元10设定动作op的连续次数(仿真基板dw 的处理张数),因此能够以适合处理单元10的步骤数进行仿真处理。
[0218]
<仿真处理张数的显示>
[0219]
在图6的例子中,在第一设定图像的表中,作为其项目显示有“仿真处 理张数”。仿真处理张数表示,在仿真处理工序的执行中,完成仿真处理的 次数(即,在仿真处理工序中已处理的仿真基板dw的张数)。在“仿真处 理张数”的项目中,对每个处理单元10显示当前时刻的仿真处理张数和处理 张数设定值。例如,与处理单元10a对应地,通过“/”并排地显示仿真处理 张数ma和处理张数设定值ma。处理单元10b到处理单元10h也相同。
[0220]
在显示器95中,显示当前时刻的仿真处理张数和处理张数设定值,因此 用户能够预测在处理单元10中完成仿真处理工序的时刻。
[0221]
<仿真处理工序的执行时刻>
[0222]
基板处理装置100有时将多个基板w作为1个单位(以下,称为处理任 务),对该处理任务中的多个基板w连续地进行基板处理。处理任务中的基 板w的张数例如是容纳架c的
可容纳张数以下,被预先决定。此处,作为 一例,处理任务中的基板w的张数是25张。
[0223]
在利用基板处理装置100进行处理任务的基板处理时,首先,控制部90 进行以下说明的调度。即,控制部90为了对处理任务中的多个基板w依次 进行处理,进行决定使基板处理装置100内的各结构在什么时刻如何动作的 调度。控制部90根据该调度的结果控制基板处理装置100,从而基板处理装 置100依次处理处理任务中的多个基板w。
[0224]
这样,在基板处理装置100依次处理处理任务中的基板w的过程中,在 仿真处理的开始条件成立的情况下,基板处理装置100也可以不执行仿真处 理,直到该处理任务的处理结束。即,基板处理装置100也可以在处理任务 的处理执行期间和下一个处理任务的处理执行期间之间的期间执行仿真处 理。若仿真处理结束,则基板处理装置100对下一个处理任务的基板w进行 处理。
[0225]
图11是表示基板处理的一例的时序图。在图11的例子中,为了便于简 化,显示有处理单元10a到处理单元10e。处理单元10a到处理单元10e分 别依次处理5张基板w,从而能够对1处理任务pj进行处理。在图11的例 子中,将处理任务pj在各处理单元10a到10e依次进行基板处理的期间用
ꢀ“
w”表示的块示意性地表示。另外,在图11的例子中,为了便于简化,仅 表示有处理单元10a的仿真处理dp的开始条件成立的情况的时序图。
[0226]
在图11的例子中,在对处理任务pj1进行处理的执行中,处理单元10 a的仿真处理dp的开始条件成立。但是,在图11的例子中,并不会响应该 开始条件成立快速地进行仿真处理dp。如图11所示,不会执行仿真处理d p,直到处理单元10a中的对处理任务pj1的处理结束。在处理单元10a对 处理任务pj1中的最后的基板w的处理的结束时刻和处理单元10a对下一 个处理任务pj2中的最初的基板w的处理的开始时刻之间的期间执行该仿真 处理dp。
[0227]
据此,没必要变更对处理任务pj1中的基板w进行的基板处理的步骤, 因此没必要再次进行调度,从而能够减少控制部90的处理负荷。
[0228]
另一方面,基板处理装置100可以在对处理任务pj进行处理的执行期间 执行仿真处理。图12是表示基板处理的一例的时序图。在图12的例子中, 在对处理任务pj进行处理的执行期间内,处理单元10a的仿真处理dp的开 始条件成立。
[0229]
控制部90响应开始条件的成立,以处理任务pj的剩余的基板w作为对 象进行再次调度。即,为了在处理单元10a中进行仿真处理,控制部90再 次进行调度。控制部90基于再次调度的结果运行基板处理装置100,从而如 图12中例示的那样,在对处理任务pj进行处理的运行期间,处理单元10a 进行仿真处理dp,在仿真处理dp结束后,重新依次将基板w搬入处理单 元10a,再对基板w进行处理
[0230]
据此,根据仿真处理的开始条件的成立,能够更快速地进行仿真处理d p,而无需等待对处理任务pj的处理结束。
[0231]
因此,控制部90可以基于用户的输入设定是在处理任务pj之间执行仿 真处理(图11),还是在处理任务pj内的基板w之间执行仿真处理(图1 2)(步骤s17:参照图5)。换言之,输入器件96能够接收仿真处理的执 行时刻(timing)的输入。
[0232]
在图6的例子中,在第一设定图像中显示有用于指示仿真处理的执行时 刻的输入要素m6。在图6的例子中,输入要素m6包括用于输入处理任务p j之间的输入要素m61和用于输入处理任务pj内的基板w之间的输入要素 m62作为仿真处理的执行时刻。
[0233]
若用户使用输入器件96操作(例如点击)输入要素,则控制部90响应 该操作,将处理任务pj之间设定为仿真处理的执行时刻。若用户使用输入器 件96操作(例如点击)输入要素m62,则控制部90响应该操作,将基板w 之间设定为仿真处理的执行时刻。
[0234]
在确定仿真处理的执行时刻的设定时,用户使用输入器件96例如操作输 入要素m92。控制部90响应该输入要素m92的操作,将表示仿真处理的执 行时刻的执行时刻信息存储于存储介质92作为设定信息之一。
[0235]
如上所述,能够设定仿真处理的执行时刻。
[0236]
控制部90在仿真处理的开始条件成立时,从存储介质92读取执行时刻 信息,在基于执行时刻信息的执行时刻,使相应的处理单元10进行仿真处理。
[0237]
据此,能够提高基板处理装置100的可用性。
[0238]
<自动仿真处理的开始和结束>
[0239]
在上述的例子中,控制部90判断仿真处理的开始条件是否成立,基于该 判断结果自动进行仿真处理。以下,将该动作称为自动仿真处理。
[0240]
输入器件96可以接收自动仿真处理的开始和结束的输入。在图6的例子 中,在第一设定图像中显示有输入要素m71和输入要素m72。输入要素m7 1是用于指示自动仿真处理的开始的输入要素,例如按键。输入要素m72是 用于指示自动仿真处理的结束的输入要素,例如按键。
[0241]
若用户使用输入器件96操作(例如点击)输入要素m71,则控制部90 响应该操作开始自动仿真处理。由此,在仿真处理的开始条件成立的处理单 元10中,自动进行仿真处理。
[0242]
若用户使用输入器件96操作(例如点击)输入要素m72,则控制部90 响应该操作结束自动仿真处理。
[0243]
<检查处理>
[0244]
控制部90可以进行判断在设定工序(步骤s1)中生成的各种设定信息 是否合适的检查处理。例如,控制部90响应用户进行的输入要素m92的操 作进行检查处理。或者,控制部90也可以响应用户进行的输入要素m71的 操作进行检查处理。
[0245]
图13是表示检查处理的一例的流程图。首先,控制部90判断输入要素 m92或输入要素m71是否被操作(步骤s51)。在判断输入要素m92和输 入要素m71未被操作时,控制部90重新执行步骤s51。
[0246]
在输入要素m92或输入要素m71被操作时,控制部90进行检查设定信 息是否合适的检查判定(步骤s52),判断该检查结果是否合适(步骤s53)。
[0247]
<对应关系信息>
[0248]
例如,控制部90检查表示处理单元10和仿真基板dw的对应关系的对 应关系信息是否合适,作为设定信息是否合适。更具体来说,控制部90判断 对多个处理单元10设定的所有类型的处理类别(此处是“feol”和“meo l”2种类型)是否被设定于多个仿真基板dw。控制部90在所有类型的处 理类别被设定于多个仿真基板dw时,判断对应关系信息合适。
[0249]
相反,控制部90在至少一个处理类别未被设置于任何多个仿真基板d w时,判断对应关系信息不合适。例如,在对全部的仿真基板dw仅设定有
ꢀ“
feol”和“meol”中的一种时,控制部90判断对应关系信息不合适。
[0250]
<仿真流程规程>
[0251]
控制部90例如也可以检查表示仿真流程规程的流程规程信息是否合适, 作为设定信息是否合适。例如,在用流程规程信息表示的仿真流程规程内的 基板搬运条件中,规定有仿真基板dw的搬运中使用某一手部h的信息。控 制部90判断仿真基板dw的搬运中使用的手部h是否按照处理类别分类。 即,判断是否对feol用的处理单元10设定一只手部h,对meol用的处 理单元10设定另一只手部h。
[0252]
在该处理类别的流程规程中规定有与处理单元10的处理类别不同的处 理类别的手部h时,控制单元90判断流程规程信息不合适。具体来说,在f eol用的处理单元10的任一个流程规程信息中规定了meol用的另一只手 部h时,控制部90判断该流程规程信息不合适。
[0253]
<其他>
[0254]
控制部90也可以判断其他设定信息是否合适。例如,也可以在没有输入 对各设定信息的设定信息的情况下,判断设定信息不合适。
[0255]
<检查结果>
[0256]
在上述的检查结果合适时,控制部90将设定信息存储于存储介质92(步 骤s54)。由此,确定设定信息。
[0257]
一方面,在检查结果不合适时,控制部90将该检查结果显示于用户界面 94的显示器95(步骤s55)。即,在检查结果不合适时,不确定设定信息, 用户界面94向用户通知检查结果并提醒再次输入。若用户识别检查结果,则 使用输入器件96进行用于重新设定设定信息的输入。
[0258]
由此,能够将适当的设定信息存储于存储介质92。换言之,能够抑制错 误设定。
[0259]
<处理类别>
[0260]
在上述的例子中,采用“feol”和“meol”作为仿真基板dw的处理 类别。此处,进一步地,还采用“free”作为仿真基板dw的处理类别。
ꢀ“
free”是表示仿真基板dw能够使用于任一处理单元10的类别。即,“f ree”是表示仿真基板dw既能够使用于feol用的处理单元10,也能够使 用于meol用的处理单元10的类别。
[0261]
图14是表示用于设定仿真基板dw的处理类别的第二设定图像的一例 的图。在图14的例子中,在“处理类别”的项目中,与各插槽对应地,横向 排列地显示有“feol”、“meol”和“free”。显示有“free”的各区 域作为用于将“free”作为输入处理类别的输入要素m15发挥作用。输入 要素m15例如是按键。若用户使用输入器件96操作(例如点击)一个输入 要素m15,则控制部90响应该操作,将与该一个输入要素m15对应的仿真 基板dw的处理类别设定为“free”。
[0262]
据此,能够提高基板处理装置100的可用性。
[0263]
<对应关系信息的初始化>
[0264]
若重复使用仿真基板dw,则污染物逐渐地积累在仿真基板dw上,因 此有时更换仿真基板dw。
[0265]
此处,作为一例,叙述使用装载埠lp中保持的容纳架c内的仿真基板 dw进行仿真处理的情况。例如,在基板处理装置100中没有设置仿真基板 容纳器bf的情况,或者,将装载埠lp设定为仿真处理中使用的容纳器的情 况下,使用该容纳架c内的仿真基板dw进行仿真处理。
理中杯14的内周面接收处理液,从而杯14的内周面润湿。由此,能够调整 处理环境。因此,在紧接着对基板w进行的处理中,能够抑制处理液从杯1 4溅回。由此,能够抑制颗粒附着于基板w。
[0279]
如上所述,详细地说明了基板处理方法以及基板处理装置100,但上述 说明在所有的方面都是例示,该基板处理装置100并不限于此。应该理解为 在不脱离本公开的范围的情况下能够设想出未例示的无数个变形例。在上述 各实施方式以及各变形例中说明的各结构只要不相互矛盾,就能够适当地组 合或省略。
[0280]
例如,采用“feol”和“meol”作为处理类别。然而,在设置制造工 序的后期工序(所谓的后道工序(back end of line,beol))用的处理 单元10的情况下,也可以采用“beol”作为处理类别。
[0281]
另外,作为处理类别,未必需要采用表示划分半导体器件的制造工序的 处理阶段的类别。总之,在不同的处理单元10中产生不同的污染的情况下, 也可以采用将区分该处理单元10的类别作为处理类别。作为具体的一例,在 供给不同的种类的处理液的处理单元10中,可能产生不同的污染,因此可以 采用区分可供给的处理液的种类的类别作为处理类别。或者,在向处理单元 10搬入具有不同种类的膜结构的基板的情况下,可能产生不同的污染,因此 也可以采用区分搬入的基板的膜结构的种类的类别作为处理类别。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1