一种挂轨式巡检机器人充电装置及充电方法与流程
1.本发明涉及煤矿井巡检技术领域,具体的涉及一种挂轨式巡检机器人充电装置及充电方法。
背景技术:
2.巡检机器人是用于完成巡检的工作,具有全方位监控能力,对环境进行检测、形成报表分析工作,发现异常告知负责人,巡检机器人的移动属性决定其适合采用无缆化的电池供电,但电池容量有限,一般只能维持几个小时,所以一旦电池电量不足,必须及时充电。巡检机器人在煤矿井下也得到了广泛的应用,由于煤矿井下工作对设备要求很高,其不能带电操作,不能因操作引起火花,以免引起爆炸,因此为了解决上述问题设计一种挂轨式巡检机器人充电装置及充电方法就显得尤为重要。
技术实现要素:
3.本发明提供了一种挂轨式巡检机器人充电装置及充电方法,通过电磁吸力对巡检机器人进行吸引,并通过电极组件的特殊结构设计使其能够与巡检机器人的接触电极良好接触,彼此之间不会留有空隙,从而防止在充电的过程中产生火花,起到了提高安全性能的作用。
4.为解决上述的技术问题,本发明提供了一种挂轨式巡检机器人充电装置,其特征在于:包括充电装置主体,所述的充电装置主体固定在轨道的底部,所述的充电装置主体与沿着轨道移动的巡检机器人相接触对其进行充电,所述的充电装置主体又是由电极组件、磁铁支架、充电控制器、充电装置安装支架、磁铁罩、安装支架和电磁铁所组成,所述的充电控制器可拆卸地连接在安装支架的底部,所述的安装支架固定在轨道的底部,所述的磁铁罩可拆卸地连接在充电装置安装支架的前端,所述的充电装置安装支架与安装支架前后连成一体,所述的电磁铁通过磁铁支架安装在磁铁罩的前端面上,所述的电极组件设置有两个,两个电极组件分别设置在充电装置安装支架的左右两侧,所述电极组件的顶部设置有与其连成一体的电极外壳卡箍,所述的电极外壳卡箍可拆卸地连接在充电装置安装支架上。
5.进一步:所述的连接件呈长条状,其上开设有用于固定的安装孔,所述的充电装置安装支架上开设有与安装孔相匹配的连接孔。
6.又进一步:所述的磁铁罩与充电装置安装支架之间还设置有磁铁罩密封垫,所述的磁铁罩内的充电装置安装支架上还固定有第一电缆固定头。
7.又进一步:所述的电极组件包括开关支架、电极导杆、电极外壳、电极挡板、球头固定螺母、电极触头、球头、球头弹簧、电极导杆弹簧、开关、第二电缆固定头和电极保护罩,所述的电极外壳卡箍设置在电极外壳的顶部,所述电极外壳的一端设置有第二电缆固定头,所述电极外壳的另一端可拆下地固定有电极挡板,所述电极挡板的中心处开合有通孔,所述的开关通过开关支架安装在电极外壳内,所述开关与电极导杆的一端相连,所述电极导
杆的另一端穿过通孔并且穿过通孔的一端上还开设有导向孔,穿过通孔的电极导杆的一端与通孔之间还设置有球头固定螺母,所述的球头固定螺母内连接有球头,所述球头的一端伸出球头固定螺母与电极触头相连,所述球头的另一端通过球头弹簧连接在电极导杆的导向孔内,所述球头与球头固定螺母的内壁之间还设置有隔离柱,所述电极外壳的内壁上设置有第一凸起部,所述电极导杆位于电极外壳内一段的外壁上还设置有第二凸起部,所述的电极导杆弹簧环绕在电极导杆的外侧并且其的两端分别与第一凸起部和第二凸起部相连,安装有电极挡板的电极外壳一端的外壁上还固定有电极保护罩,所述电极保护罩远离电极外壳的一端上还开设有用于电极触头伸出的通槽。
8.本发明还提供了一种挂轨式巡检机器人充电装置的使用方法,其特征在于:包括以下步骤:
9.s1:巡检机器人发送信号:巡检机器人通过自身的2.4g无线传输单元给充电装置主体发送信号,表明充电需求;
10.s2:充电装置主体反馈信号:充电装置主体中的充电控制器收到巡检机器人发送的信号会进行判断,从而反馈信号给巡检机器人,在其无故障以及无其它巡检机器人充电的情况下会通过充电装置主体内的2.4g无线传输单元发送可以充电的信号,反之则发送不可以充电的信号;
11.s3:巡检机器人位置移动:巡检机器人中的机器人控制中心收到可以充电的信号后,根据自身的编码定位单元进行位置判断,从而自主向充电装置主体运行;
12.s4:巡检机器人与充电装置主体相连接:巡检机器人通过自身的编码定位单元在接近充电装置主体时会自动停止运动并发送信号给充电装置主体,充电装置主体会给其上的电磁铁通电使其对巡检机器人上的电磁吸合点进行吸引,从而使巡检机器人继续向着充电装置主体移动,使巡检机器人上的接触电极与充电装置主体上的电极组件相接触;
13.s5:充电:充电装置主体上的电极组件与巡检机器人上的接触电极接触良好后,电极组件内的接触开关会发送信号给充电控制器,充电控制器会发送信号给巡检机器人,机器人控制中心会利用管理单元使锂电池与充电装置主体相连通,从而利用电极组件给巡检机器人内的锂电池进行充电;
14.s6:停止充电:巡检机器人在充满电或者接到上位机巡检指令后,巡检机器人向充电装置发送断电指令,根据巡检机器人内部充电信息判断充电已停止,机器人向充电装置发送完全断开电磁吸合电压指令,即断开电磁吸合。
15.进一步:所述的步骤s4具体是由以下步骤所组成:
16.a1:根据巡检机器人自身的编码定位单元在距离充电装置0.5m时,自动降低运行速度;
17.a2:巡检机器人通过2.4g无线传输单元发送打开充电装置电磁吸合器供电;
18.a3:巡检机器人根据避障监测单元测试距离充电装置0.03m时,自主进行自由刹车;
19.a4:配合巡检机器人刹车距离及充电装置电磁吸合力,巡检机器人接触电极和充电装置主体上的电极组件连接。
20.又进一步:所述的步骤s5中巡检机器人接触电极与充电装置主体上的电极组件接触良好是指电极组件中弹簧电极受到巡检机器人接触电极挤压,弹簧电极挤压到设定行程
后,电极组件中的接触开关会接通,这样即判断巡检机器人和充电装置连接良好。
21.再进一步:所述的步骤s5中巡检机器人中的机器人控制中心检测到正在充电时会发送信号给充电装置主体,使充电装置主体降低供给电磁铁的电压等级,从而降低电磁铁的吸力以及发热量。
22.采用上述结构后,本发明通过电磁吸力对巡检机器人进行吸引,并通过电极组件的特殊结构设计使其能够与巡检机器人的接触电极良好接触,彼此之间不会留有空隙,从而防止在充电的过程中产生火花,起到了提高安全性能的作用;而且本发明通过采用上述方法使巡检机器人与充电装置主体在接触时不会发生不必要的碰撞,防止火花的产生。电极触头采用万向球头结构,充电过程与电极座对接时,保证了电极触头和电极座的两个接合面完全贴合、无缝隙,降低对接精度要求,实现可靠充电。通过电磁铁的吸力,起到限位作用,防止机器人发生移动,造成电极接合面之间有缝隙,使充电不可靠。电极罩防尘、防水,对电极及电极组件内部起到保护作用,增加了充电装置的使用寿命。
附图说明
23.下面结合附图和具体实施方式对本发明作进一步详细的说明。
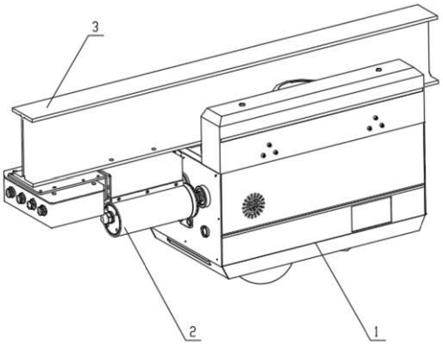
24.图1为本发明的使用状态图。
25.图2为本发明的主视结构图。
26.图3为本发明的俯视结构图。
27.图4为本发明的侧视结构图。
28.图5为电极组件的结构图。
具体实施方式
29.如图1、图2、图3和图4所示的一种挂轨式巡检机器人充电装置,包括充电装置主体2,所述的充电装置主体固定在轨道3的底部,所述的充电装置主体与沿着轨道移动的巡检机器人1相接触对其进行充电,所述的充电装置主体又是由电极组件2-1、磁铁支架2-2、充电控制器2-3、充电装置安装支架2-4、磁铁罩2-5、安装支架2-6和电磁铁2-8所组成,所述的充电控制器可拆卸地连接在安装支架的底部,所述的安装支架固定在轨道3的底部,所述的磁铁罩可拆卸地连接在充电装置安装支架的前端,所述的充电装置安装支架与安装支架前后连成一体,所述的电磁铁通过磁铁支架安装在磁铁罩的前端面上,所述的电极组件设置有两个,两个电极组件分别设置在充电装置安装支架的左右两侧,所述电极组件的顶部设置有与其连成一体的电极外壳卡箍2-10,所述的电极外壳卡箍可拆卸地连接在充电装置安装支架上。本发明通过电磁吸力对巡检机器人进行吸引,并通过电极组件的特殊结构设计使其能够与巡检机器人的接触电极良好接触,彼此之间不会留有空隙,从而防止在充电的过程中产生火花,起到了提高安全性能的作用。
30.上述的连接件呈长条状,其上开设有用于固定的安装孔,所述的充电装置安装支架上开设有与安装孔相匹配的连接孔。
31.如图2和图3所示的磁铁罩与充电装置安装支架之间还设置有磁铁罩密封垫2-7,所述的磁铁罩内的充电装置安装支架上还固定有第一电缆固定头2-9。
32.如图5所示的电极组件包括开关支架2-1-1、电极导杆2-1-2、电极外壳2-1-3、电极
挡板2-1-4、球头固定螺母2-1-5、电极触头2-1-6、球头2-1-11、球头弹簧2-1-12、电极导杆弹簧2-1-13、开关2-1-14、第二电缆固定头2-1-15和电极保护罩2-1-19,所述的电极外壳卡箍设置在电极外壳的顶部,所述电极外壳的一端设置有第二电缆固定头,所述电极外壳的另一端可拆下地固定有电极挡板,所述电极挡板的中心处开合有通孔,所述的开关通过开关支架安装在电极外壳内,所述开关与电极导杆的一端相连,所述电极导杆的另一端穿过通孔并且穿过通孔的一端上还开设有导向孔2-1-2-1,穿过通孔的电极导杆的一端与通孔之间还设置有球头固定螺母,所述的球头固定螺母内连接有球头,所述球头的一端伸出球头固定螺母与电极触头相连,所述球头的另一端通过球头弹簧连接在电极导杆的导向孔内,所述球头与球头固定螺母的内壁之间还设置有隔离柱,所述电极外壳的内壁上设置有第一凸起部2-1-3-1,所述电极导杆位于电极外壳内一段的外壁上还设置有第二凸起部2-1-2-2,所述的电极导杆弹簧环绕在电极导杆的外侧并且其的两端分别与第一凸起部和第二凸起部相连,安装有电极挡板的电极外壳一端的外壁上还固定有电极保护罩,所述电极保护罩远离电极外壳的一端上还开设有用于电极触头伸出的通槽。本发明中电极触头采用万向球头结构,充电过程与电极座对接时,保证了电极触头和电极座的两个接合面完全贴合、无缝隙,降低对接精度要求,实现可靠充电。通过电磁铁的吸力,起到限位作用,防止机器人发生移动,造成电极接合面之间有缝隙,使充电不可靠。电极罩防尘、防水,对电极及电极组件内部起到保护作用,增加了充电装置的使用寿命。
33.本发明还提供了一种挂轨式巡检机器人充电装置的使用方法,其包括以下步骤:
34.s1:巡检机器人发送信号:巡检机器人通过自身的2.4g无线传输单元给充电装置主体发送信号,表明充电需求;
35.s2:充电装置主体反馈信号:充电装置主体中的充电控制器收到巡检机器人发送的信号会进行判断,从而反馈信号给巡检机器人,在其无故障以及无其它巡检机器人充电的情况下会通过充电装置主体内的2.4g无线传输单元发送可以充电的信号,反之则发送不可以充电的信号;
36.s3:巡检机器人位置移动:巡检机器人中的机器人控制中心收到可以充电的信号后,根据自身的编码定位单元进行位置判断,从而自主向充电装置主体运行;
37.s4:巡检机器人与充电装置主体相连接:巡检机器人通过自身的编码定位单元在接近充电装置主体时会自动停止运动并发送信号给充电装置主体,充电装置主体会给其上的电磁铁通电使其对巡检机器人上的电磁吸合点进行吸引,从而使巡检机器人继续向着充电装置主体移动,使巡检机器人上的接触电极与充电装置主体上的电极组件相接触;
38.s5:充电:充电装置主体上的电极组件与巡检机器人上的接触电极接触良好后,电极组件内的接触开关会发送信号给充电控制器,充电控制器会发送信号给巡检机器人,机器人控制中心会利用管理单元使锂电池与充电装置主体相连通,从而利用电极组件给巡检机器人内的锂电池进行充电;
39.s6:停止充电:巡检机器人在充满电或者接到上位机巡检指令后,巡检机器人向充电装置发送断电指令,根据巡检机器人内部充电信息判断充电已停止,机器人向充电装置发送完全断开电磁吸合电压指令,即断开电磁吸合。
40.上述的步骤s4具体是由以下步骤所组成:
41.a1:根据巡检机器人自身的编码定位单元在距离充电装置0.5m时,自动降低运行
速度;
42.a2:巡检机器人通过2.4g无线传输单元发送打开充电装置电磁吸合器供电;
43.a3:巡检机器人根据避障监测单元测试距离充电装置0.03m时,自主进行自由刹车;
44.a4:配合巡检机器人刹车距离及充电装置电磁吸合力,巡检机器人接触电极和充电装置主体上的电极组件连接。
45.上述的步骤s5中巡检机器人接触电极与充电装置主体上的电极组件接触良好是指电极组件中弹簧电极受到巡检机器人接触电极挤压,弹簧电极挤压到设定行程后,电极组件中的接触开关会接通,这样即判断巡检机器人和充电装置连接良好。
46.上述的步骤s5中巡检机器人中的机器人控制中心检测到正在充电时会发送信号给充电装置主体,使充电装置主体降低供给电磁铁的电压等级,从而降低电磁铁的吸力以及发热量。
47.本发明通过采用上述方法使巡检机器人与充电装置主体在接触时不会发生不必要的碰撞,防止火花的产生。
48.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1