一种组合倾斜平台式大型天线的制作方法
1.本实用新型涉及到天线技术领域,特别涉及一种组合倾斜平台式大型天线。
背景技术:
2.卫星地面固定跟踪测量站天线常常采用方位-俯仰型天线座。这种座架型式具有结构简单、传统可靠、精度高等优点。但却解决不了过顶跟踪的问题。过顶跟踪是动目标跟踪中的关键技术。尤其是对于低轨卫星,会在90
°
的天顶附近出现一个“盲区”。当卫星飞经这个盲区时,天线的方位速度变化剧烈而俯仰速度变化缓慢,地面站天线会因方位速度不够大而丢失跟踪目标。“盲区”的大小与地面站天线的方位速度和目标高度有关。提高方位速度可以减小“盲区”的范围,但“盲区”依然存在。因为要完全消除盲区理论上需要方位速度无穷大,而受制于电机调速范围,天线座体积和重量等因素,方位速度也不能无限制提高。
3.近年来随着低轨卫星遥感技术的不断发展,使用低轨卫星进行地面资源勘察或军事侦察已经相当普遍,过顶跟踪问题愈发显得迫切。到目前为止,各国科学家解决目标过顶跟踪问题主要采用了如下的一些方式:
4.x-y型天线座:x-y型天线座的二根轴都是水平配重,互相正交,相当于把方位-俯仰型天线座的方位轴转到水平位置。因此,它的盲区在地平线上。通常该区域不在要求的工作空域内,所以可以很好的解决过顶跟踪问题。但其缺点是:结构不紧凑,两轴均需加平衡重量,从而造成两轴的转动惯量很大,不适合大型天线。
5.方位轴倾斜天线座:将天线方位轴向某个方向倾斜一个角度,使得测站天线偏离跟踪盲区,从而降低对天线方位转动最大速度的要求,实现对天顶区域的有效跟踪。由于跟踪目标的轨道的不同,方位轴倾斜具有明显的方向性,故而该形式相当于是把方位-俯仰型天线座安装在了倾斜机构上。但其缺点是:1、倾斜机构的转动回差会直接影响天线座的基础刚度和跟踪精度,从而使天线座的谐振频率降低,2、倾斜机构距离天线反射面太远,使得天线本身承受较大的倾覆力矩;3、承受能力有限,制作和调整困难,也不适合于大型天线。
6.方位-俯仰天线座增加抬升机构:针对于方位俯仰型的天线,在其天线座下方增加了抬升装置。相当于将整个天线抬起来,并抬起的方向还可以调整。抬升装置的一般采用液压或丝杠等形式。一个方向的抬升到某一固定角度,就相当于方位轴倾斜天线座的情况。该种形式的缺点也是不适合于大型天线。
7.并联机构天线座:抛开了传统的轴系运动,而直接使用多杆并联机构作为天线座。各杆使用直线驱动机构以及铰接方式,实现了天线头相对于天线座的多自由度运动,尤其对于天顶区域的指向更加准确灵活。其缺点是变换速度有限,承载能力有限,该结构形式也不适合大型天线。
8.主动反射面技术:贵州平塘大窝凼建成的500迷口径球面天线(fast),由于口径巨大,完全超过了传统天线座的承载范围,故而采用了反射面的主动变形技术。fast采用了主动反射面形式,并没有天线座结构。反射面直接安装在一张柔性索网上,通过下拉地锚促动
器对柔性索网的节点进行实时数控的拉力驱动,使得反射面被张拉成瞬时不同指向的抛物面。该形式也有一些引申的结构,比如无天线座而直接三杆(四杆,六杆等)顶升支撑反射面等。该类形式天线虽然不存在天顶盲区的问题,但是观测角度有限,集中于天顶区域附近。另外,该天线形式具有较大局限性,除特殊情况外并不适合推广。
9.综上所述,以上各种方法虽然可以解决小口径天线的过顶问题,但并不能有效解决大型全可动天线的过顶跟踪问题,主要是难以克服大型天线的体量问题。对于大型全可动天线,其反射体加上座架的重量非常之大,动辄几千吨,且其高度达百米左右,在运动过程中会产生巨大惯量。
技术实现要素:
10.有鉴于此,本实用新型提供了一种组合倾斜平台式大型天线,该天线实现过顶跟踪功能,且具有结构简洁,传动可靠,便于施工等特点。
11.为了实现上述目的,本实用新型所采取的技术方案为:
12.一种组合倾斜平台式大型天线,包括反射体和天线座架,其特征在于,所述天线座架为从上至下顺次连接的多层平台,反射体位于最顶部的平台上;所述平台数量n的范围是:1≤n≤4。
13.进一步的,所述平台包括至少4个支撑立柱和台板;支撑立柱的顶部连接台板的边缘位置,底部通过对应的升降装置与下一级的台板固定,每一升降装置单独工作。
14.进一步的,最底部的平台位于地基的顶部。
15.进一步的,每一升降装置均包括两套互为安全备份的液压伺服机构。
16.进一步的,还包括用于固定升降装置的辅助支撑,所述辅助支撑包括斜杆,斜杆一端固定于升降装置外壁的中间位置,另一端固定在下一级的台板上。
17.进一步的,还包括控制单元;所述控制单元包括位姿传感设备、测距系统和控制终端;所述测距系统包括位于地基上的多组非接触式测距设备和安装在天线背部的多组测距辅助装置;所述测距辅助装置和测距设备一一对应;所述位姿传感设备、测距设备和升降装置均与控制终端连接其中,位姿传感设备和测距设备为传感器,升降装置为执行器。
18.进一步的,所述非接触式测距设备为激光测距仪,测距辅助装置为反光靶标板;所述位姿传感设备为陀螺仪或倾角传感器。
19.本实用新型采取上述技术方案所产生的有益效果在于:
20.1.本实用新型通过串联多组平台相互倾斜运动的方式实现了高精度的天线运动及大角度的天顶指向,克服了传统俯仰-方位形式天线结构存在天顶盲区的问题,也克服了fast等单级主动变位形式天线指向范围过窄的问题。
21.2.本实用新型采用多级驱动串联的方式,很大提高了反射体的运动速度。
22.3.本实用新型直接采用液压伺服机构顶升的方式,驱动力大;并采用了备份动力系统,稳定可靠。
23.4.本实用新型结构形式简单,支撑立柱、辅助支撑装置等多部件重复使用,通用性强,便于维护,造价较低。
附图说明
24.图1是本实用新型实施例的基本位姿结构示意图。
25.图2是本实用新型实施例的基本位姿侧面示意图
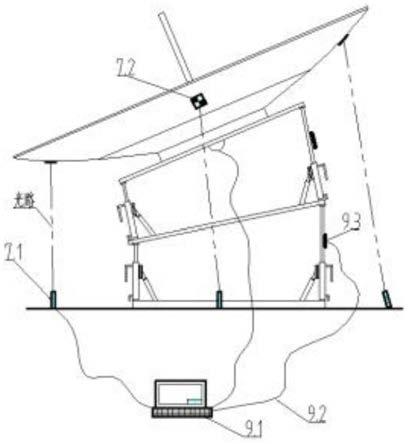
26.图3是本实用新型实施例的倾斜位姿结构示意图。
27.图4是本实用新型实施例的倾斜位姿侧面示意图。
28.图5是本实用新型实施例的液压缸的结构示意图
29.图中:1、地基平台,2、中间平台,3、顶层平台,4、支撑立柱,4.1、下平台,4.2、升降装置,4.3、上平台,5、反射体,6、辅助支撑,7、测距系统,7.1、激光测距仪,7.2、反光靶标板,8、位姿传感系统,9、控制系统,9.1,控制计算机,9.2、光纤链路,9.3、传感器。
具体实施方式
30.下面,结合附图和具体实施方式对本实用新型做进一步的说明。
31.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
32.一种组合倾斜平台式大型天线,弃用了传统的方位俯仰型天线座,而采用了串联多组平台的形式。相邻平台之间通过伺服机构实现一定角度的相对倾斜运动,多层组合从而实现了顶层平台相对于地面的大角度倾斜。天顶区域正是该形式天线基本的指向位姿,精度很高,从而不存在天顶盲区问题,自然实现了过顶跟踪功能。
33.一种组合倾斜平台式大型天线,包括地基平台、中间平台、顶层平台、支撑立柱、反射体等主要部分,还包括辅助支撑装置、测距系统,位姿传感系统、控制系统等其他部分。
34.所述的地基平台、中间平台及顶层平台等,均为稳定牢固的钢结构桁架平台,基地平台还可以是稳固的一体化底面。其中的中间平台可以没有,即只有一组支撑立柱;也可以有多层,即具有多组串行的支撑立柱。各层之间的并行运动可以实现顶层平台的大倾角运动和快速运动。
35.其中的顶层平台也可以直接使用反射体的背部支撑结构。
36.所述的支撑立柱,包含多组,布置于上述相邻两平台之间。每组支撑立柱都包括下平台,升降装置,上平台等主要部分。其中,升降装置采用了液压伺服机构,可以实现很大顶升力量。上平台与上层的平台相连接,连接处使用了球铰的接触方式。针对主要的支撑立柱设置有备份支撑系统,以防单个升降装置故障影响设备使用。备份支撑系统和支撑立柱相互独立,互不影响,可以采用不同形式。另外,每层的支撑立柱的形式和数量不一定相同,需根据具体情况予以设计。
37.所述的反射体是天线信号收集装置,可以是传统的抛物反射面配合背架形式的天线头,也可以是大型阵列单元等形似。反射体是天线的功能部分。
38.所述的辅助支撑装置,针对于主要的支撑立柱设置,用于保证支撑立柱的稳定。由于支撑立柱倾斜平台的形式整体来说属于连杆结构,并不稳定。辅助支撑装置用于避免支撑立柱在上层平台倾斜后因承受过大侧向力矩而倾覆的可能。
39.所述的测距系统,包括天线周围地基上固定的多组非接触式测距设备,以及反射体背部固定的多组测距辅助装置。非接触测距设备可以选用激光测距仪,相匹配的,测距辅
助装置选择为反光靶标。在天线运动过程中,激光测距仪发出定向激光光束,射向反光靶标经反射后被捕获,从而可以得出相对的距离。反光靶标的位置是相对固定并且已知的。所以多组设备协同作业,可以得知天线头的运动速度和指向角度。反光靶标还可以固定到各层平台或其他位置,用于获知相应信息。
40.上述的测距系统还有一个健康监测的功能。由于反射体背部的反光靶标位置是相对固定的,其相对距离也是固定的。相对固定点之间距离的变化往往是因为结构变形引起的。测距系统可以定期测量不同反光靶标之间的距离加以比对,及时掌握反射体的变形情况,从而可以监测反射体的主体结构是否健康正常。
41.所述的位姿传感系统安装于反射体及各平台。位姿传感系统可以是陀螺仪装置或倾角传感器等。在反射体运动过程中,位姿传感系统可以实时输出反射体的转动角度等信息,确定反射体指向并和测距系统所得数据相互印证。
42.所述的控制系统包括控制计算机及其与激光测距仪等各信息源之间的光电链路等部分。控制系统主要用于控制各支撑立柱的伸缩变化从而实现反射体精确的空天指向。测距系统的数据、位姿传感系统输出的数据、以及各支撑立柱输出的受力及伸缩量等数据通过光电链路都传输到控制计算机,由其存储,处理并输出指令。
43.下面为更一具体的实施例:
44.参照图1至图5,本实施例采用了二级平台串联的结构,通过二级串联机构的并行运动实现了反射体的大倾角运动和快速指向。
45.本实施例包括包括地基平台1、中间平台2、顶层平台3、支撑立柱4、反射体5等主要部分,还包括辅助支撑6、测距系统7,位姿传感系统8、控制系统9等其他部分。
46.所述的地基平台1是稳固的一体化地面基础,钢铁水泥浇筑而成。
47.所述的中间平台2和顶层平台3均为桁架形式钢结构平台。
48.所述的支撑立柱4,每组支撑立柱都包含了两套完全一样但相互独立的支撑立柱,互为安全备份。每个支撑立柱都包括下平台4.1,升降装置4.2,上平台4.3等主要部分。其中,升降装置采用了液压伺服机构,实现了很大的顶升力量。上平台与上层的平台的连接处使用了球铰的接触方式。
49.在本实施例中,每层支撑立柱分别包括四组两层共八组。相邻立柱之间距离45米,每个立柱的伸缩长度总变化量为10米。上下层立柱相对应布置。则相对于地基平台来说,顶层平台可以约45
°
的天顶观测角度范围。
50.所述的反射体5是天线信号收集装置,可以是传统的抛物反射面配合背架形式的天线头,也可以是大型阵列单元等形似。本实施例中选用了口径100米的抛物面形式的反射体。
51.所述的辅助支撑装置6,均匀向心分布,分别支撑在了支撑立柱升降装置的中部位置。倾斜平台的形式整体来说属于连杆结构,并不稳定。在上层的平台倾斜后由于重力作用对支撑立柱产生了很大的侧向力矩。而辅助支撑装置平衡了这个力矩,使得结构整体更加安全稳定。
52.所述的测距系统7,在本实施例中测距系统采用了激光测距的方式。包括在天线周围地基上对称固定四组激光测距仪7.1,及相对应的在反射体下部对称固定的四块反光靶标板7.2。
53.在天线运动过程中,激光测距仪发出定向激光光束,射向反光靶标经反射后被捕获,从而可以得出相对的距离。四组设备协同作业,测得了每个反光靶标点的运动数据,从而可以得知天线头的运动速度和指向角度。通过定期对比两个反光靶标点之间距离,就可以监控反射体的结构变形情况,从而实现对反射体结构整体进行健康监测的目的。比如两点间的距离在一个短时间内忽然有较大变化,就说明上部结构存在局部过渡变形的可能,需要及时确定及排除。
54.所述的位姿传感系统8安装于反射体。在本实施例中位姿传感系统采用了陀螺仪装置。在反射体运动过程中,位姿传感系统可以实时输出反射体的转动角度及速度信息,并和测距系统数据相互印证。
55.所述的控制系统9包括控制计算机9.1、与激光测距仪等各信息源之间的光纤链路9.2及传感器9.3等等。其中一部分传感器设置在支撑立柱的伸出端。传感器及测距仪等各个输出数据通过光纤链路实施传输到控制计算机内,由其存储,处理并输出指令,从而控制各支撑立柱的伸缩,以实现精确控制反射体空天指向的目的。
56.综上所述,本实用新型专利提供的技术方案弃用了传统的方位俯仰型天线座,而采用了串联多组平台的形式。相邻平台之间通过伺服机构实现一定角度的相对倾斜运动,多层组合从而实现了顶层平台相对于地面的大角度倾斜。天顶区域正是该形式天线基本的指向位姿,精度很高,从而不存在天顶盲区问题,自然实现了过顶跟踪功能。同时,该方案还具有结构简洁,传动可靠,便于维护等特点,是对现有技术方案的的一个创造性的重要的改进。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1