一种适用各种尺寸晶圆中心的矫正装置的制作方法
1.本实用新型属于半导体集成电路加工领域,尤其涉及一种适用各种尺寸晶圆中心的矫正装置。
背景技术:
2.在集成电路制造工艺中的半导体设备中,晶圆通常通过传输机械臂从晶圆供应模块内取出,如loadport(晶圆装卸机)、smif(圆晶隔离盒技术)、晶圆片盒等,通常晶圆在晶圆片盒内的中心位置是相对偏移的,并且各晶圆之间的中心位置也是错开的。
3.一般情况下,晶圆在工艺腔体内被加工时,要求晶圆中心与工艺腔体的下电极或者卡盘等载台中心的重合度较高,传输机械臂的手指是仅通过真空吸附将晶圆固定在手指上,在此过程中并没有对晶圆进行二次校准,故此需要晶圆中心矫正装置,例如aligner(晶圆校准机)、晶圆对中装置等。
4.现有技术中,主要存在机械和光学两种类型的晶圆中心矫正装置,但是,前述的晶圆中心矫正装置的检测范围比较小,兼容性比较差,仅是针对某一尺寸晶圆进行检测校准,不能同时满足各种尺寸晶圆的使用,通用性较低。
技术实现要素:
5.本实用新型所要解决的技术问题是针对背景技术的不足提供了一种适用各种尺寸晶圆中心的矫正装置。
6.本实用新型为解决上述技术问题采用以下技术方案:
7.一种适用各种尺寸晶圆中心的矫正装置,包括本体盒,本体盒上通过相机支架安装有相机,本体盒上还设置有相机光源;本体盒内设置有用于晶圆传输的晶圆输送模块和用于晶圆旋转的旋转载台模块。
8.进一步的,所述相机支架上固定有吹气嘴。
9.进一步的,所述相机光源包括有2条背光光源。
10.进一步的,所述晶圆输送模块包括水平运动的直线运动电缸和连接在直线运动电缸上直线运动导杆气缸,所述直线运动导杆气缸上连接有机械手支架,所述机械手支架向上延伸出本体盒并水平连接有机械手。
11.进一步的,所述旋转载台模块包括设置在本体盒内的机座和电机,电机上通过旋转机构连接有晶圆载台。
12.进一步的,所述晶圆载台上设置有真空吸盘或静电吸盘。
13.进一步的,所述相机在上下方向上与所述晶圆输送模块间隔开且相对设置。
14.进一步的,所述相机选用200万-1000万像素的ccd广角相机。
15.进一步的,所述相机外安装有相机罩。
16.本实用新型采用以上技术方案与现有技术相比,具有以下技术效果:
17.本实用新型能够快速对晶圆进行校正,应用范围广,兼容性好,能同时满足各种尺
寸晶圆的使用。
附图说明
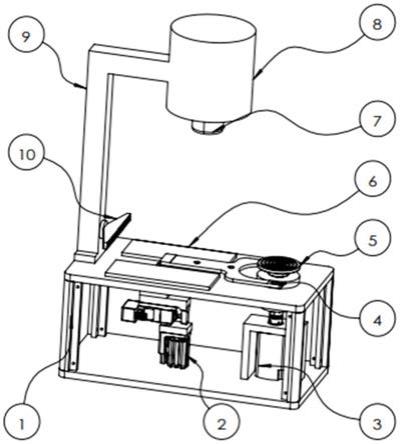
18.图1为本实施例的整体结构示意图;
19.图2为本实施例中旋转载台模块的结构示意图;
20.图3为本实施例中晶圆输送模块的结构示意图;
21.图4为本实施例中旋转载台模块的结构示意图;
22.图5为本实施例中晶圆的实际圆心位置结构示意图;
23.图6为本实施例中坐标系示意图;
24.图7为本实施例中工作流程图。
25.图中,1、本体盒;2、晶圆输送模块;21、直线运动电缸;22、直线运动导杆气缸;23、机械手支架;3、旋转载台模块;31、旋转机构;32、电机;33、机座;4、机械手;5、晶圆载台;6、相机光源;7、ccd广角相机;8、相机罩;9、相机支架;10、吹气嘴。
具体实施方式
26.下面结合附图对本实用新型的技术方案做进一步的详细说明:
27.本发明公开一种适用各种尺寸晶圆中心的矫正装置,如图1所示,该装置包括本体盒1,本体盒1上固定有相机支架9,相机支架9的另一端安装有ccd广角相机7(ccd:数字图像成像的图像传感器),ccd广角相机7外装有相机罩8,用来保护ccd广角相机7,相机支架9上固定一吹气嘴10, 相机支架9、吹气嘴10、本体盒1构成装置的主框架模块。
28.本体盒1上装有相机光源6,用以照亮晶圆,可有效提供晶圆亮度,有利于图像处理,保证图像的稳定性,ccd广角相机7、相机光源6及相机罩8构成相机系统模块;相机系统模块主要是通过给晶圆局部拍照,通过软件进行精确计算,找出晶圆圆心相对晶圆载台中心的坐标位置,相机光源6包括2条背光光源,给相机提供清晰的晶圆轮廓线,使用200至1000万像素的ccd广角镜头,视野范围可以达到300x200毫米,可以拍到4英寸到18英寸晶圆的半径,从而使得该装置能够满足目前半导体行业正在生产的4/6/8/12/18英寸的晶圆。
29.本体盒上还设有晶圆输送模块2和旋转载台模块3,用于晶圆传输和晶圆旋转。晶圆传输模块2包括机械手4、直线运动电缸21、直线运动导杆气缸22和机械手支架23,通过气缸的运动,将晶圆准确输送到晶圆载台上;旋转载台模块3,包括晶圆载台5、旋转机构31、电机32,安装电机的机座32,所述晶圆载台5上设置有真空吸盘或静电吸盘,晶圆通过静电吸附或真空吸附被吸在晶圆载台5上。
30.该装置的工作原理:
31.如图1所示,首先将晶圆放置于相机光源6和ccd广角相机7之间,然后调节合适的相机物距。通过ccd广角相机7拍设得到如图4所示的图像, 利用影像软件,相机可以抓取颜色分界线(也是晶圆轮廓线),然后使用圆形扫描边缘位置工具设置好圆弧检验区域。如图5所示,在该区域内的圆弧上,抓取10到100个点位坐标,通过各个点位置,拟合成一个圆形,计算出圆形的圆心位置,也就是该晶圆的实际圆心位置。
32.在晶圆载台5上面建立如图6所示的直角坐标系,晶圆通过机械手4移动至晶圆载台5上,通过真空吸盘或静电吸盘将晶圆吸附在晶圆载台5上,吹气嘴10正对着晶圆吹出微
风,在晶圆上方及周边区域形成高压区,使外界微粒不能污染晶圆,起到一定的保护作用。
33.晶圆找取标记位置的具体步骤如下:
34.步骤一,如图7,点亮相机光源,相机拍照计算出晶圆圆心a相对于坐标圆心o的坐标位置;ao连线将于y轴形成一个夹角β,并且可以计算出ao线段的长度值。
35.步骤二,旋转机构带动晶圆以o为圆心,逆时针旋转β角度,使晶圆圆心a与y轴重合。
36.步骤三,释放晶圆真空,搬运机构将晶圆搬起,沿着y轴运动,运动ao线段的距离,使晶圆圆心a与坐标圆心o重合,从而矫正了晶圆的圆心。
37.步骤四,旋转机构带着晶圆转动,相机进行拍照,找到晶圆的标记m位置后,机构将m点旋转到系统指定的位置,如图7步骤四位置在y轴上,从而实现了晶圆找取标记位置的功能。
38.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本实用新型所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
39.以上实施例仅为说明本实用新型的技术思想,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落入本实用新型保护范围之内。上面对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以再不脱离本实用新型宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1