一种具有通信和伪装功能的天线系统及其控制方法与流程
1.本发明涉及天线伪装方法,具体涉及一种具有通信和伪装功能的天线系统及其控制方法。
背景技术:
2.现有通信天线的伪装方式主要包括以下两种:第一种是在天线/设备外壳增加电磁伪装网,隔绝他方电磁波的侦查,达到电磁伪装的目的;该方案需要改变天线/设备的外形,并且当天线需要通信时需人工进行电磁伪装网的撤收,影响天线的通信效率;第二种是采用超材料天线罩实现电磁伪装;该方案虽对天线/设备的外形没有影响,但需根据天线的透波频段来进行超材料的设计和生产,导致该方案无法在各种频段的通信天线里广泛应用,此外超材料天线罩与普通天线罩相比,成本增加超过100倍。
技术实现要素:
3.本发明的目的是解决现有通信天线伪装方式存在或是需要改变天线/设备的外形,并且影响天线的通信效率,或是无法广泛应用,并且成本过高的不足之处,而提供一种具有通信和伪装功能的天线系统及其控制方法。
4.为了解决上述现有技术所存在的不足之处,本发明提供了如下技术解决方案:一种具有通信和伪装功能的天线系统,包括天线,其特殊之处在于:还包括天线罩、伺服伪装系统和上位机;所述天线设置在安装平台上,天线上方设置天线罩,天线罩为曲面结构,且与安装平台形成半圆柱体结构;所述伺服伪装系统包括设置在天线罩上的第一伺服传动装置、第二伺服传动装置、伪装布和控制机;所述第一伺服传动装置和第二伺服传动装置设置在安装平台上,分别与天线罩两个底端对应;所述第一伺服传动装置包括第一驱动装置,以及与第一驱动装置输出端连接且沿半圆柱体结构轴向设置的第一伺服转轴;所述第二伺服传动装置包括第二驱动装置,以及与第二驱动装置输出端连接且沿半圆柱体结构轴向设置的第二伺服转轴;所述伪装布设置在天线罩内侧,伪装布包括沿半圆柱体结构圆周分布且相互连接的伪装部和透波部,所述伪装部采用电磁伪装布,伪装部的端部设置在第一伺服传动装置上,所述透波部采用玻纤透波布,透波部的端部设置在第二伺服传动装置上;所述天线罩内侧设置有多个沿半圆柱体结构圆周分布的导向杆,用于对伪装布进行限位,多个导向杆沿轴向延伸,并且导向杆两端与天线罩固定;所述伪装布位于天线罩与多个导向杆之间;所述第一驱动装置、第二驱动装置的工作模式包括力矩模式和速度模式;所述第一驱动装置处于速度模式,第二驱动装置处于力矩模式时,所述第一伺服转轴转动并带动伪装布在天线罩与导向杆之间沿半圆柱体结构圆周方向向第一伺服转轴方向运动,将伪装
部缠绕于第一伺服转轴上使透波部覆盖天线罩的内侧;所述第一驱动装置处于力矩模式,第二驱动装置处于速度模式时,所述第二伺服转轴转动并带动伪装布在天线罩与导向杆之间沿半圆柱体结构圆周方向向第二伺服转轴方向运动,将透波部缠绕于第二伺服转轴上,使伪装部覆盖天线罩的内侧;所述控制机用于根据上位机指令识别伺服伪装系统状态对第一伺服传动装置和第二伺服传动装置进行控制,控制机设置在安装平台上,且与上位机通信连接,控制机的两个输出端分别与第一驱动装置和第二驱动装置连接;所述伺服伪装系统状态包括伪装状态、通信状态和切换状态,所述伪装状态为天线罩被伪装部完全覆盖,所述通信状态为天线罩被透波部完全覆盖,所述切换状态为天线罩被伪装部和透波部同时覆盖;所述上位机指令包括伪装指令和通信指令。
5.进一步地,所述第一伺服传动装置还包括设置在安装平台上的第一前端安装座和第一后端安装座,以及设置在第一前端安装座上的第一行星减速器;所述第一前端安装座内和第一后端安装座内分别设置第一前端轴承、第一后端轴承,所述第一伺服转轴两端分别与第一前端轴承内圈、第一后端轴承内圈固定,第一伺服转轴通过第一行星减速器与第一驱动装置输出端连接。
6.进一步地,所述第二伺服传动装置还包括设置在安装平台上的第二前端安装座和第二后端安装座,以及设置在第二前端安装座上的第二行星减速器;所述第二前端安装座内和第二后端安装座内分别设置第二前端轴承、第二后端轴承,所述第二伺服转轴两端分别与第二前端轴承内圈、第二后端轴承内圈固定,第二伺服转轴通过第二行星减速器与第二驱动装置输出端连接。
7.进一步地,所述控制机包括机箱,以及设置在机箱内的两个伺服驱动器、控制pcb板和继电器;所述控制pcb板与上位机通信连接,控制pcb板通过继电器分别与两个伺服驱动器的输入端电连接;两个伺服驱动器的输出端分别与第一驱动装置和第二驱动装置连接。
8.进一步地,所述天线罩采用玻璃钢纸蜂窝材料,该材料具有优异的透波性能,用于满足所述天线系统的高透波性能。
9.进一步地,所述伪装布下表面涂覆ptfe涂层,可减小伪装布的表面摩擦系数,增加使用寿命。
10.同时,本发明提供一种具有通信和伪装功能的天线系统的控制方法,其特殊之处在于,基于上述具有通信和伪装功能的天线系统,包括如下步骤:步骤1、第一驱动装置、第二驱动装置均处于力矩模式;控制机更新伺服伪装系统状态后,将伺服伪装系统状态反馈给上位机;步骤2、若上位机收到按键,则执行步骤3,否则执行步骤4;步骤3、按键处理;步骤3.1、上位机发送上位机指令给控制机;步骤3.2、若控制机收到伪装指令,则执行步骤3.3;若控制机收到通信指令,则执行步骤3.4;步骤3.3、控制机控制第二驱动装置切换为速度模式;第二驱动装置驱动第二伺服转轴转动并拉动伪装布在天线罩与导向杆之间沿半圆柱体结构圆周方向运动,将透波部缠
绕于第二伺服转轴上,直至天线罩内侧被伪装部完全覆盖,所述天线系统实现伪装功能;第一驱动装置和第二驱动装置停止工作,随后返回步骤1;步骤3.4、控制机控制第一驱动装置切换为速度模式;第二驱动装置驱动第二伺服转轴拉紧伪装布,第一驱动装置驱动第一伺服转轴转动并拉动伪装布在天线罩与导向杆之间沿半圆柱体结构圆周方向运动,将伪装部缠绕于第一伺服转轴上,直至天线罩内侧被透波部完全覆盖,所述天线系统实现通信功能;第一驱动装置和第二驱动装置停止工作,随后返回步骤1;步骤4、若控制机收到上位机指令,则执行步骤5,否则返回步骤1;步骤5、上位机指令处理;步骤5.1、若控制机收到伪装指令,则执行步骤5.2;若控制机收到通信指令,则执行步骤5.3;步骤5.2、控制机控制第二驱动装置切换为速度模式;第二驱动装置驱动第二伺服转轴转动并拉动伪装布在天线罩与导向杆之间沿半圆柱体结构圆周方向运动,将透波部缠绕于第二伺服转轴上,直至天线罩内侧被伪装部完全覆盖,所述天线系统实现伪装功能;第一驱动装置和第二驱动装置停止工作,随后返回步骤1;步骤5.3、控制机控制第一驱动装置切换为速度模式;第二驱动装置驱动第二伺服转轴拉紧伪装布,第一驱动装置驱动第一伺服转轴转动并拉动伪装布在天线罩与导向杆之间沿半圆柱体结构圆周方向运动,将伪装部缠绕于第一伺服转轴上,直至天线罩内侧被透波部完全覆盖,所述天线系统实现通信功能;第一驱动装置和第二驱动装置停止工作,随后返回步骤1。
11.与现有技术相比,本发明的有益效果是:(1)本发明公开一种具有通信和伪装功能的天线系统,其在天线罩内设置有兼具伪装和通信功能的伪装布,并且设置有第一伺服传动装置和第二伺服传动装置进行控制,不仅实现了天线设备的通信功能和电磁伪装功能,也不会改变天线设备外形,可实现光学伪装,相较于使用超材料天线罩的伪装方案,本发明在成本上接近常规天线。
12.(2)基于上述具有通信和伪装功能的天线系统,本发明公开一种具有通信和伪装功能的天线系统的控制方法,其采用双驱动装置结合双工作模式对伪装布进行控制,具体为第一驱动装置、第二驱动装置初始均处于力矩模式,根据上位机指令,控制机控制第一驱动装置或第二驱动装置切换为速度模式,从而实现了天线系统伪装功能或通信功能的瞬态响应。
附图说明
13.图1为本发明一种具有通信和伪装功能的天线系统实施例的结构示意图;图2为本发明实施例中天线罩内侧的结构示意图;图3为本发明实施例中控制机的结构示意图;图4为本发明实施例中第一伺服传动装置的结构示意图;图5为本发明实施例中第二伺服传动装置的结构示意图;图6为本发明实施例中伪装布的结构示意图;图7为本发明一种具有通信和伪装功能的天线系统的控制方法实施例的原理框
图;图8为本发明一种具有通信和伪装功能的天线系统的控制方法实施例的流程图;图9为本发明实施例中按键处理的流程图;图10为本发明实施例中上位机指令处理的流程图。
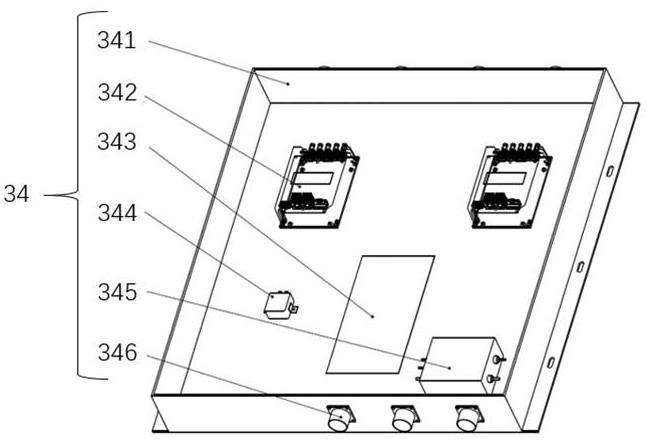
14.附图标记说明如下:1-天线;2-天线罩,21-导向杆;3-伺服伪装系统,31-第一伺服传动装置,311-第一伺服转轴,312-第一驱动装置,313-第一行星减速器,314-第一前端安装座,315-第一后端安装座,316-第一前端轴承,317-第一后端轴承,32-第二伺服传动装置,321-第二伺服转轴,322-第二驱动装置,323-第二行星减速器,324-第二前端安装座,325-第二后端安装座,326-第二前端轴承,327-第二后端轴承,33-伪装布,331-伪装部,332-透波部,34-控制机,341-机箱,342-伺服驱动器,343-控制pcb板,344-继电器,345-滤波器,346-电连接器;4-安装平台。
具体实施方式
15.下面结合附图和示例性实施例对本发明作进一步地说明。
16.参照图1至图6,一种具有通信和伪装功能的天线系统,包括天线1、天线罩2、伺服伪装系统3和上位机。
17.天线1设置在安装平台4上,天线1上方设置天线罩2,天线罩2为曲面结构,且与安装平台4形成半圆柱体结构,天线罩2采用具有优异透波性能的玻璃钢纸蜂窝材料。
18.伺服伪装系统3包括设置在天线罩2上的第一伺服传动装置31、第二伺服传动装置32、伪装布33和控制机34。
19.第一伺服传动装置31和第二伺服传动装置32设置在安装平台4上,分别与天线罩2两个底端对应。第一伺服传动装置31包括第一前端安装座314、第一后端安装座315、第一伺服转轴311、第一行星减速器313和第一驱动装置312;第一前端安装座314和第一后端安装座315设置在安装平台4上,第一前端安装座314内和第一后端安装座315内分别设置第一前端轴承316、第一后端轴承317,第一伺服转轴311沿半圆柱体结构轴向设置,第一伺服转轴311两端分别与第一前端轴承316内圈、第一后端轴承317内圈固定,第一行星减速器313设置在第一前端安装座314上,第一伺服转轴311通过第一行星减速器313与第一驱动装置312输出端连接。第二伺服传动装置32包括第二前端安装座324、第二后端安装座325、第二伺服转轴321、第二行星减速器323和第二驱动装置322;第二前端安装座324和第二后端安装座325设置在安装平台4上,第二前端安装座324内和第二后端安装座325内分别设置第二前端轴承326、第二后端轴承327,第二伺服转轴321沿半圆柱体结构轴向设置,第二伺服转轴321两端分别与第二前端轴承326内圈、第二后端轴承327内圈固定,第二行星减速器323设置在第二前端安装座324上,第二伺服转轴321通过第二行星减速器323与第二驱动装置322输出端连接。
20.伪装布33设置在天线罩2内侧,伪装布33包括沿半圆柱体结构圆周分布且相互连接的伪装部331和透波部332,伪装部331采用电磁伪装布,伪装部331的端部设置在第一伺服传动装置31上,透波部332采用玻纤透波布,透波部332的端部设置在第二伺服传动装置32上;天线罩2内侧设置有多个沿半圆柱体结构圆周分布的导向杆21,用于对伪装布33进行限位,多个导向杆21沿轴向延伸,并且导向杆21两端与天线罩2固定;伪装布33位于天线罩
与多个导向杆之间,伪装布33下表面涂覆ptfe涂层,可减小伪装布33的表面摩擦系数,增加使用寿命。
21.第一驱动装置312、第二驱动装置322的工作模式包括力矩模式和速度模式;第一驱动装置312处于速度模式,第二驱动装置322处于力矩模式时,第一伺服转轴311转动并带动伪装布33在天线罩2与导向杆21之间沿半圆柱体结构圆周方向运动,将伪装部331缠绕于第一伺服转轴311上,使透波部332覆盖天线罩2的内侧,用于实现天线系统通信功能;第一驱动装置312处于力矩模式,第二驱动装置322处于速度模式时,第二伺服转轴321转动并带动伪装布33在天线罩2与导向杆21之间沿半圆柱体结构圆周方向运动,将透波部332缠绕于第二伺服转轴321上,使伪装部331覆盖天线罩2的内侧,用于实现天线系统通信功能。
22.参照图7,控制机34用于根据上位机指令识别伺服伪装系统3状态对第一伺服传动装置31和第二伺服传动装置32进行控制,控制机34设置在安装平台4上,控制机34包括机箱341,以及设置在机箱341内的伺服驱动器342、控制pcb板343、继电器344、滤波器345和电连接器346;控制pcb板343与上位机通信连接,控制pcb板343通过继电器344分别与两个伺服驱动器342的输入端电连接,两个伺服驱动器342分别与第一驱动装置312和第二驱动装置322电连接;所述伺服伪装系统3状态包括伪装状态、通信状态和切换状态,所述伪装状态为天线罩2被伪装部331完全覆盖,所述通信状态为天线罩2被透波部332完全覆盖,所述切换状态为天线罩2被伪装部331和透波部332同时覆盖;所述上位机指令包括伪装指令和通信指令。
23.参照图8至图10,基于上述具有通信和伪装功能的天线系统,本发明提供一种具有通信和伪装功能的天线系统的控制方法,包括如下步骤:步骤1、第一驱动装置312、第二驱动装置322均处于力矩模式;控制机34更新伺服伪装系统3状态后,将伺服伪装系统3状态反馈给上位机;步骤2、若上位机收到按键,则执行步骤3,否则执行步骤4;步骤3、按键处理;步骤3.1、上位机发送上位机指令给控制机34;步骤3.2、若控制机34收到伪装指令,则执行步骤3.3;若控制机34收到通信指令,则执行步骤3.4;步骤3.3、控制机34控制第二驱动装置322切换为速度模式;第二驱动装置322驱动第二伺服转轴321转动并拉动伪装布33在天线罩2与导向杆21之间沿半圆柱体结构圆周方向运动,将透波部332缠绕于第二伺服转轴321上,直至天线罩2内侧被伪装部331完全覆盖,所述天线系统实现伪装功能;第一驱动装置312和第二驱动装置322停止工作,随后返回步骤1;步骤3.4、控制机34控制第一驱动装置312切换为速度模式;第二驱动装置322驱动第二伺服转轴321拉紧伪装布33,第一驱动装置312驱动第一伺服转轴311转动并拉动伪装布33在天线罩2与导向杆21之间沿半圆柱体结构圆周方向运动,将伪装部331缠绕于第一伺服转轴311上,直至天线罩2内侧被透波部332完全覆盖,所述天线系统实现通信功能;第一驱动装置312和第二驱动装置322停止工作,随后返回步骤1;步骤4、若控制机34收到上位机指令,则执行步骤5,否则返回步骤1;步骤5、上位机指令处理;
步骤5.1、若控制机34收到伪装指令,则执行步骤5.2;若控制机34收到通信指令,则执行步骤5.3;步骤5.2、控制机34控制第二驱动装置322切换为速度模式;第二驱动装置322驱动第二伺服转轴321转动并拉动伪装布33在天线罩2与导向杆21之间沿半圆柱体结构圆周方向运动,将透波部332缠绕于第二伺服转轴321上,直至天线罩2内侧被伪装部331完全覆盖,所述天线系统实现伪装功能;第一驱动装置312和第二驱动装置322停止工作,随后返回步骤1;步骤5.3、控制机34控制第一驱动装置312切换为速度模式;第二驱动装置322驱动第二伺服转轴321拉紧伪装布33,第一驱动装置312驱动第一伺服转轴311转动并拉动伪装布33在天线罩2与导向杆21之间沿半圆柱体结构圆周方向运动,将伪装部331缠绕于第一伺服转轴311上,直至天线罩2内侧被透波部332完全覆盖,所述天线系统实现通信功能;第一驱动装置312和第二驱动装置322停止工作,随后返回步骤1。
24.以上实施例仅用以说明本发明的技术方案,而非对其限制,对于本领域的普通专业技术人员来说,可以对前述各实施例所记载的具体技术方案进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本发明所保护技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1