一种电机温度确定方法、装置及车辆与流程
1.本发明涉及电机控制领域,特别涉及一种电机温度确定方法、装置及车辆。
背景技术:
2.随着电机控制领域的发展,通常在电机定子上设置温度传感器,用来采集电机定子温度,在检测到电机定子温度过高时,控制电机停止运转,避免出现由于电机过热而导致的电机损坏等事故。
3.通常,在电机定子的绕组里埋设体积极小的(positive temperature coefficient,ptc)正温度系数热敏电阻传感器,在正常情况下ptc传感器处于低阻态,不影响电机的正常运转。当电机内部因故障过热时,ptc传感器受热阻值跃变,与之配合的继电器失电释放,电机停止运转,等候排除故障后重新运转。
4.但是,目前都只是在电机定子上设置温度传感器(例如ptc传感器),无法采集电机转子的温度,导致温度检测结果的可靠性较低,并且,如果温度传感器失效,将导致电机无法正常工作,降低了电机的可靠性。
技术实现要素:
5.有鉴于此,本发明旨在提出电机温度确定方法、装置及车辆,以解决在电机定子上设置温度传感器,无法采集电机转子的温度,导致温度检测结果的可靠性较低,并且,如果温度传感器失效,将导致电机无法正常工作,降低了电机的可靠性的问题。
6.为达到上述目的,本发明的技术方案是这样实现的:
7.第一方面,本发明实施例提供了一种电机温度确定方法,应用于电机控制器,所述方法包括:
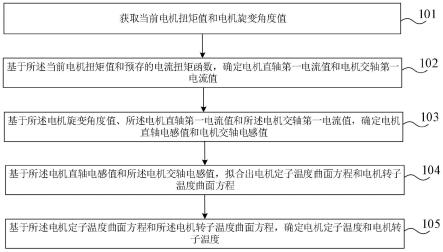
8.获取当前电机扭矩值和电机旋变角度值;
9.基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值;
10.基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值;
11.基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程;
12.基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度。
13.可选地,所述基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值,包括:
14.在电机测试标定过程中,获取电机测试直轴第一电流值和电机测试交轴第一电流值;
15.基于所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,确定电流扭
矩函数,所述电流扭矩函数为所述电机测试直轴第一电流值、所述电机测试交轴第一电流值与测试电机扭矩值的对应关系函数;
16.基于所述当前电机扭矩值和所述电流扭矩函数,确定所述当前电机扭矩值对应的所述电机直轴第一电流值和所述电机交轴第一电流值。
17.可选地,所述电机控制器和电流传感器连接,所述基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值,包括:
18.基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电压值和电机交轴电压值;
19.根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,确定电机直轴电感值和电机交轴电感值。
20.可选地,所述根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,确定电机直轴电感值和电机交轴电感值,包括:
21.根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,通过迭代做差方式确定电机直轴电感值和电机交轴电感值。
22.可选地,所述基于所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,确定电流扭矩函数,包括:
23.获取电机测试旋变角度值;
24.确定所述电机测试旋变角度值对应的测试电机扭矩值;
25.基于所述测试电机扭矩值、所述电机直轴第一电流值和所述电机交轴第一电流值,进行曲面拟合,得到电流扭矩函数。
26.第二方面,本发明实施例提供了一种电机温度确定装置,应用于电机控制器,所述装置包括:
27.获取模块,用于获取当前电机扭矩值和电机旋变角度值;
28.第一确定模块,用于基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值;
29.第二确定模块,用于基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值;
30.拟合模块,用于基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程;
31.第三确定模块,用于基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度。
32.可选地,所述第一确定模块包括:
33.获取子模块,用于在电机测试标定过程中,获取电机测试直轴第一电流值和电机测试交轴第一电流值;
34.第一确定子模块,用于基于所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,确定电流扭矩函数,所述电流扭矩函数为所述电机测试直轴第一电流值、所述电机测试交轴第一电流值与测试电机扭矩值的对应关系函数;
35.第二确定子模块,用于基于所述当前电机扭矩值和所述电流扭矩函数,确定所述
当前电机扭矩值对应的所述电机直轴第一电流值和所述电机交轴第一电流值。
36.可选地,所述电机控制器和电流传感器连接,所述第二确定模块包括:
37.第三确定子模块,用于基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电压值和电机交轴电压值;
38.第四确定子模块,用于根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,确定电机直轴电感值和电机交轴电感值。
39.可选地,所述第四确定子模块包括:
40.第一确定单元,用于根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,通过迭代做差方式确定电机直轴电感值和电机交轴电感值。
41.可选地,所述第一确定子模块包括:
42.获取单元,用于获取电机测试旋变角度值;
43.第二确定单元,用于确定所述电机测试旋变角度值对应的测试电机扭矩值;
44.拟合单元,用于基于所述测试电机扭矩值、所述电机直轴第一电流值和所述电机交轴第一电流值,进行曲面拟合,得到电流扭矩函数。
45.第三方面,本发明实施例提供了一种车辆,包括第二方面所述任一所述的电机温度确定装置。
46.相对于现有技术,本发明实施例具有如下优点:
47.本发明实施例提供的电机温度确定方法,该方法可以应用于电机控制器,获取当前电机扭矩值和电机旋变角度值;基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值;基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值,基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程,基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度,实现了通过电机控制器确定电机定子温度和电机转子温度的方案,无需增加电机温度传感器,降低了成本,避免了由于温度传感器损坏而导致的电机故障的情况,提高了电机的可靠性和稳定性。
附图说明
48.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
49.图1示出了本发明实施例一提供的一种电机温度确定方法的步骤流程图;
50.图2示出了本发明实施例提供的一种电机温度确定系统的流程图;
51.图3示出了本发明实施例二提供的一种电机温度确定方法的步骤流程图;
52.图4示出了本发明实施例五提供的一种电机温度确定装置的结构示意图。
具体实施方式
53.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
54.下面将参考附图并结合实施例来详细说明本发明。
55.参照图1,示出了本发明实施例一提供的一种电机温度确定方法的步骤流程图,该方法可以应用于电机控制器(moter control unit,mcu)。
56.如图1所示,该电机温度确定方法具体可以包括如下步骤:
57.步骤101:获取当前电机扭矩值和电机旋变角度值。
58.图2示出了本发明提供的一种电机温度确定系统的流程图,如图2所示,电机温度确定系统包括:电机控制器01、以及和电机控制器连接的电机02、角度传感器03和电流传感器04。其中,角度传感器03可以获取电机旋变角度值,并将该旋变角度值发送至mcu 01,可以基于所述电机旋变角度值确定当前电机扭矩值。
59.在获取当前电机扭矩值和电机旋变角度值之后,执行步骤102。
60.步骤102:基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值。
61.可选地,在电机测试标定过程中,获取电机测试直轴第一电流值和电机测试交轴第一电流值;基于所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,确定电流扭矩函数,所述电流扭矩函数为所述电机测试直轴第一电流值、所述电机测试交轴第一电流值与测试电机扭矩值的对应关系函数;基于所述当前电机扭矩值和所述电流扭矩函数,确定所述当前电机扭矩值对应的所述电机直轴第一电流值和所述电机交轴第一电流值。
62.参见图2,电流传感器04可以获取电机的三相电流值,并对该三相静止坐标系下的三相电流值进行坐标变换,将三相电流值变换为两相旋转坐标系下的电机直轴第一电流值和电机交轴第一电流值。电机控制器01可以将获取电机温度,并基于电机温度对电机的工作状态进行控制。
63.其中,电机直轴(d轴)第一电流值被记作id。电机交轴(q轴)第一电流值被记作iq。
64.具体地,可以基于所述电机旋变角度值确定当前电机扭矩值;基于所述当前扭矩值、所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,进行曲面拟合,得到电流扭矩函数。
65.示例的,可以基于id、iq和当前电机扭矩值,进行曲面拟合,通过无阶曲面拟合,得到电流扭矩函数:
66.f(x,y)=ρ00+ρ10*x+ρ01*y+ρ20*x
^2
+ρ11*x*y+ρ02*y
^2
+ρ30*x
^3
+ρ21*x
^2
*y
67.+ρ12*x*y
^2
+ρ03*y
^3
+ρ40*x
^4
+ρ31*x
^3
*y+ρ22*x
^2
*y
^2
+ρ13*x*y
^3
+ρ04*y
^4
68.+ρ40*x
^4
+ρ31*x
^3
*y+ρ22*x
^2
*y
^2
+ρ13*x*y
^3
+ρ04*y
^4
69.+ρ50*x
^5
+ρ41*x
^4
*y+ρ32*x
^3
*y
^2
+ρ23*x
^2
*y
^3
+ρ14*x*y
^4
+ρ05*y
^5
70.其中,电流扭矩函数f(x,y)是通过将测试得到的id、iq和测试电机扭矩值导入软件中自动拟合得到的以id、iq为自变量,电机扭矩值为因变量的函数,一组id、iq对应有一个电机扭矩值。
71.在基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值之后,执行步骤103。
72.步骤103:基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值。
73.可选地,步骤103的具体实施方式可以包括以下子步骤:
74.子步骤a1:基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电压值和电机交轴电压值。
75.具体地,基于所述电流扭矩函数确定电机直轴目标电流值和电机交轴目标电流值;基于所述电机直轴目标电流值和所述电机交轴目标电流值,确定电机直轴电压值和电机交轴电压值。
76.可选地,根据当前扭矩值,代入电流扭矩函数中,得到电机直轴目标电流值(id)和电机交轴目标电流值(iq),通过比例积分(proportional integral controller,pi)调节器基于该电机直轴目标电流值和电机交轴目标电流值确定电机直轴电压值(ud)和电机交轴电压值(uq)。
77.其中,pi调节器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例和积分通过线性组合构成控制量,对被控对象进行控制。
78.子步骤a2:根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,确定电机直轴电感值和电机交轴电感值。
79.具体地,根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值(ud)和所述电机交轴电压值(uq),通过迭代做差方式确定电机直轴电感值和电机交轴电感值。
80.其中,直轴交轴坐标系下的稳态电压方程为:
81.ud=r
×id-ωe×
lq
×iq
;
[0082][0083]
其中,r表示电机电阻;ωe表示电角度值(也即是旋变角度值);表示永磁体磁链,是已知量;lq表示电机交轴电感值;ld表示电机直轴电感值。
[0084]
具体地,对于lq的计算,固定id,则:
[0085]ud1
=r
×id1-ωe×
lq1×iq1
;
[0086]ud2
=r
×id2-ωe×
lq2×iq2
;
[0087]
δu
d1
=r
×
(i
d1-i
d2
)-ωe×
lq2×
(i
q1-i
q2
);
[0088]
其中:r
×
(i
d1-i
d2
)等于零,并且lq1≈lq2,则:
[0089]
δu
d1
=-ωe×
lq2×
(i
q1-i
q2
);
[0090]
又由于其中n表示圈数,ω表示角度,则:
[0091]
同理可得:
[0092]
δu
d2
=ωe×
(lq2×iq2-lq3×iq3
);
[0093][0094]
具体地,对于ld的计算,固定iq,则:
[0095][0096]
又则:
[0097]
uq=r
×iq
+ωe×
ld
×
id;
[0098]
δu
q1
=r
×
(i
q2-i
q1
)+ωe×
(l
d2
×id2-l
d1
×id1
);
[0099]
由于固定iq,则i
q2-i
q1
≈0;l
d1
≈l
d2
;
[0100][0101]ud3-u
d2
=r
×
(i
q3-i
q2
)+ωe×
(l
d3
×id3-l
d2
×id2
);
[0102][0103]
在基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值之后,执行步骤104。
[0104]
步骤104:基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程。
[0105]
根据步骤102计算的到的电机直轴电感值和电机交轴电感值,结合在电机标定过程中,在电机定子位置和电机转子位置分别设置的温度传感器所确定的的电机电子温度关系以及电机转子温度关系,分别进行电机定子温度曲面和电子转子温度曲面的拟合,以得到电机定子温度曲面方程和电子转子温度曲面方程。该电机定子温度曲面方程和电机转子温度曲面方程可以是五阶方程,本技术实施例对此不作具体限定。
[0106]
在基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程之后,执行步骤105。
[0107]
步骤105:基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度。
[0108]
可以基于电机定子温度曲面方程确定电机定子温度,可以基于电机转子温度曲面方程确定电子转子温度,实现了通过电机控制器确定电机定子温度和电机转子温度的方案,无需增加电机温度传感器,降低了成本,避免了由于温度传感器损坏而导致的电机故障的情况,提高了电机的可靠性和稳定性。
[0109]
本发明实施例提供的电机温度确定方法,该方法可以应用于电机控制器,获取当前电机扭矩值和电机旋变角度值;基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值;基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值,基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程,基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度,实现了通过电机控制器确定电机定子温度和电机转子温度的方案,无需增加电机温度传感器,降低了成本,避免了由于温度传感器损坏而导致的电机故障的情况,提高了电机的可靠性和稳定性。
[0110]
参照图3,示出了本发明实施例二提供的一种电机温度确定方法的步骤流程图,该方法可以应用于电机控制器。
[0111]
如图3所示,该电机温度确定方法具体可以包括如下步骤:
[0112]
步骤201:获取当前电机扭矩值和电机旋变角度值。
[0113]
图2示出了本发明提供的一种电机温度确定系统的流程图,如图2所示,电机温度确定系统包括:电机控制器01、以及和电机控制器连接的电机02、角度传感器03和电流传感器04。其中,角度传感器03可以获取电机旋变角度值,并将该旋变角度值发送至mcu 01,可以基于所述电机旋变角度值确定当前电机扭矩值。
[0114]
在获取当前电机扭矩值和电机旋变角度值之后,执行步骤202。
[0115]
步骤202:在电机测试标定过程中,获取电机测试直轴第一电流值和电机测试交轴第一电流值,基于所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,确定电流扭矩函数。
[0116]
所述电流扭矩函数为所述电机测试直轴第一电流值、所述电机测试交轴第一电流值与测试电机扭矩值的对应关系函数。
[0117]
参见图2,电流传感器04可以获取电机的三相电流值,并对该三相静止坐标系下的三相电流值进行坐标变换,将三相电流值变换为两相旋转坐标系下的电机直轴第一电流值和电机交轴第一电流值。电机控制器01可以将获取电机温度,并基于电机温度对电机的工作状态进行控制。
[0118]
其中,电机直轴(d轴)第一电流值被记作id。电机交轴(q轴)第一电流值被记作iq。
[0119]
具体地,可以基于所述电机旋变角度值确定当前电机扭矩值;基于所述当前扭矩值、所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,进行曲面拟合,得到电流扭矩函数。
[0120]
示例的,可以基于id、iq和当前电机扭矩值,进行曲面拟合,通过无阶曲面拟合,得到电流扭矩函数:
[0121]
f(x,y)=ρ00+ρ10*x+ρ01*y+ρ20*x
^2
+ρ11*x*y+ρ02*y
^2
+ρ30*x
^3
+ρ21*x
^2
*y
[0122]
+ρ12*x*y
^2
+ρ03*y
^3
+ρ40*x
^4
+ρ31*x
^3
*y+ρ22*x
^2
*y
^2
+ρ13*x*y
^3
+ρ04*y
^4
[0123]
+ρ40*x
^4
+ρ31*x
^3
*y+ρ22*x
^2
*y
^2
+ρ13*x*y
^3
+ρ04*y
^4
[0124]
+ρ50*x
^5
+ρ41*x
^4
*y+ρ32*x
^3
*y
^2
+ρ23*x
^2
*y
^3
+ρ14*x*y
^4
+ρ05*y
^5
[0125]
其中,电流扭矩函数f(x,y)是通过将测试得到的id、iq和测试电机扭矩值导入软件中自动拟合得到的以id、iq为自变量,电机扭矩值为因变量的函数,一组id、iq对应有一个电机扭矩值。
[0126]
在基于所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,确定电流扭矩函数之后,执行步骤203。
[0127]
步骤203:基于所述当前电机扭矩值和所述电流扭矩函数,确定所述当前电机扭矩值对应的所述电机直轴第一电流值和所述电机交轴第一电流值。
[0128]
将当前电机扭矩值代入所述电流扭矩函数,得到当前电机扭矩值对应的电机直轴第一电流值和电机交轴第一电流值。
[0129]
在基于所述当前电机扭矩值和所述电流扭矩函数,确定所述当前电机扭矩值对应的所述电机直轴第一电流值和所述电机交轴第一电流值之后,执行步骤204。
[0130]
步骤204:基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电压值和电机交轴电压值。
[0131]
具体地,基于所述电流扭矩函数确定电机直轴目标电流值和电机交轴目标电流值;基于所述电机直轴目标电流值和所述电机交轴目标电流值,确定电机直轴电压值和电
机交轴电压值。
[0132]
可选地,根据当前扭矩值,代入电流扭矩函数中,得到电机直轴目标电流值(id)和电机交轴目标电流值(iq),通过比例积分(proportional integral controller,pi)调节器基于该电机直轴目标电流值和电机交轴目标电流值确定电机直轴电压值(ud)和电机交轴电压值(uq)。
[0133]
其中,pi调节器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例和积分通过线性组合构成控制量,对被控对象进行控制。
[0134]
在基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电压值和电机交轴电压值之后,执行步骤205。
[0135]
步骤205:根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,确定电机直轴电感值和电机交轴电感值。
[0136]
具体地,根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值(ud)和所述电机交轴电压值(uq),通过迭代做差方式确定电机直轴电感值和电机交轴电感值。
[0137]
其中,直轴交轴坐标系下的稳态电压方程为:
[0138]
ud=r
×id-ωe×
lq
×iq
;
[0139][0140]
其中,r表示电机电阻;ωe表示电角度值(也即是旋变角度值);表示永磁体磁链,是已知量;lq表示电机交轴电感值;ld表示电机直轴电感值。
[0141]
具体地,对于lq的计算,固定id,则:
[0142]ud1
=r
×id1-ωe×
lq1×iq1
;
[0143]ud2
=r
×id2-ωe×
lq2×iq2
;
[0144]
δu
d1
=r
×
(i
d1-i
d2
)-ωe×
lq2×
(i
q1-i
q2
);
[0145]
其中:r
×
(i
d1-i
d2
)等于零,并且lq1≈lq2,则:
[0146]
δu
d1
=-ωe×
lq2×
(i
q1-i
q2
);
[0147]
又由于其中n表示圈数,ω表示角度,则:
[0148][0149]
同理可得:
[0150]
δu
d2
=ωe×
(lq2×iq2-lq3×iq3
);
[0151][0152]
具体地,对于ld的计算,固定iq,则:
[0153][0154]
又则:
[0155]
uq=r
×iq
+ωe×
ld
×
id;
[0156]
δu
q1
=r
×
(i
q2-i
q1
)+ωe×
(l
d2
×id2-l
d1
×id1
);
[0157]
由于固定iq,则i
q2-i
q1
≈0;l
d1
≈l
d2
;
[0158][0159]ud3-u
d2
=r
×
(i
q3-i
q2
)+ωe×
(l
d3
×id3-l
d2
×id2
);
[0160][0161]
在根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,确定电机直轴电感值和电机交轴电感值后,执行步骤206。
[0162]
步骤206:基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程。
[0163]
根据步骤103计算的到的电机直轴电感值和电机交轴电感值,结合在电机标定过程中,在电机定子位置和电机转子位置分别设置的温度传感器所确定的的电机电子温度关系以及电机转子温度关系,分别进行电机定子温度曲面和电子转子温度曲面的拟合,以得到电机定子温度曲面方程和电子转子温度曲面方程。该电机定子温度曲面方程和电机转子温度曲面方程可以是五阶方程,本技术实施例对此不作具体限定。
[0164]
在基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程之后,执行步骤207。
[0165]
步骤207:基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度。
[0166]
可以基于电机定子温度曲面方程确定电机定子温度,可以基于电机转子温度曲面方程确定电子转子温度,实现了通过电机控制器确定电机定子温度和电机转子温度的方案,无需增加电机温度传感器,降低了成本,避免了由于温度传感器损坏而导致的电机故障的情况,提高了电机的可靠性和稳定性。
[0167]
本发明实施例提供的电机温度确定方法,该方法可以应用于电机控制器,获取当前电机扭矩值和电机旋变角度值;基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值;基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值,基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程,基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度,实现了通过电机控制器确定电机定子温度和电机转子温度的方案,无需增加电机温度传感器,降低了成本,避免了由于温度传感器损坏而导致的电机故障的情况,提高了电机的可靠性和稳定性。
[0168]
参照图4,示出了本发明实施例五提供的一种电机温度确定装置的结构示意图,应用于电机控制器,电机温度确定装置300包括:
[0169]
获取模块301,用于获取当前电机扭矩值和电机旋变角度值;
[0170]
第一确定模块302,用于基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值;
[0171]
第二确定模块303,用于基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值;
[0172]
拟合模块304,用于基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程;
[0173]
第三确定模块305,用于基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度。
[0174]
可选地,所述第一确定模块包括:
[0175]
获取子模块,用于在电机测试标定过程中,获取电机测试直轴第一电流值和电机测试交轴第一电流值;
[0176]
第一确定子模块,用于基于所述电机测试直轴第一电流值和所述电机测试交轴第一电流值,确定电流扭矩函数,所述电流扭矩函数为所述电机测试直轴第一电流值、所述电机测试交轴第一电流值与测试电机扭矩值的对应关系函数;
[0177]
第二确定子模块,用于基于所述当前电机扭矩值和所述电流扭矩函数,确定所述当前电机扭矩值对应的所述电机直轴第一电流值和所述电机交轴第一电流值。
[0178]
可选地,所述电机控制器和电流传感器连接,所述第二确定模块包括:
[0179]
第三确定子模块,用于基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电压值和电机交轴电压值;
[0180]
第四确定子模块,用于根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,确定电机直轴电感值和电机交轴电感值。
[0181]
可选地,所述第四确定子模块包括:
[0182]
第一确定单元,用于根据直轴交轴坐标系下的稳态电压方程、所述电机直轴电压值和所述电机交轴电压值,通过迭代做差方式确定电机直轴电感值和电机交轴电感值。
[0183]
可选地,所述第一确定子模块包括:
[0184]
获取单元,用于获取电机测试旋变角度值;
[0185]
第二确定单元,用于确定所述电机测试旋变角度值对应的测试电机扭矩值;
[0186]
拟合单元,用于基于所述测试电机扭矩值、所述电机直轴第一电流值和所述电机交轴第一电流值,进行曲面拟合,得到电流扭矩函数。本发明实施例中的电机温度确定装置的具体实现方式在方法侧已经详细介绍,故在此不再做赘述。
[0187]
本发明实施例提供的电机温度确定装置,可以应用于电机控制器,获取当前电机扭矩值和电机旋变角度值;基于所述当前电机扭矩值和预存的电流扭矩函数,确定电机直轴第一电流值和电机交轴第一电流值;基于所述电机旋变角度值、所述电机直轴第一电流值和所述电机交轴第一电流值,确定电机直轴电感值和电机交轴电感值,基于所述电机直轴电感值和所述电机交轴电感值,拟合出电机定子温度曲面方程和电机转子温度曲面方程,基于所述电机定子温度曲面方程和所述电机转子温度曲面方程,确定电机定子温度和电机转子温度,实现了通过电机控制器确定电机定子温度和电机转子温度的方案,无需增加电机温度传感器,降低了成本,避免了由于温度传感器损坏而导致的电机故障的情况,提高了电机的可靠性和稳定性。
[0188]
本发明实施例还提供了一种车辆,包括本发明实施例任一的电机温度确定装置。
[0189]
需要说明的是,本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
[0190]
尽管已描述了本发明实施例的可选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括可选实施例以及落入本发明实施例范围的所有变更和修改。
[0191]
最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体与另一个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的物品或者终端设备中还存在另外的相同要素。
[0192]
以上对本发明所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,同时,对于本领域的一般技术人员,依据本发明的原理及实现方式,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1