一种光伏发电站智能清洗机器人的自动充电装置的制作方法
[0001]
本实用新型涉及自动充电技术领域,具体为一种光伏发电站智能清洗机器人的自动充电装置。
背景技术:
[0002]
清洁机器人已经成为工业生产生活中不可或缺的一项重要电器,虽然,清洁机器人清洁时十分方便,但是,当其处于低电量时需要人工将其移动到充电口充电,十分不方便,因此需要一种可以在其处于低电量时自动寻找充电口充电的清洁机器人。
技术实现要素:
[0003]
本实用新型的目的是提供一种光伏发电站智能清洗机器人的自动充电装置,具备低电量时自动充电的优点,解决了清洁机器人充电复杂的问题。
[0004]
本实用新型为解决上述技术问题,提供如下技术方案:一种光伏发电站智能清洗机器人的自动充电装置,包括清洁车、清洁装置和充电装置,所述清洁装置安装在所述清洁车的底部,所述充电装置安装在所述清洁车的前端;所述清洁车包括车厢、存物平台、报警灯、控制面板、行驶轮、防撞梁和把手,所述存物平台设置在所述车厢的尾部位置,所述报警灯安装在车厢的顶部前端,所述控制面板设置在车厢的顶部正上方,所述行驶轮安装在车厢的底部,所述防撞梁安装在车厢前端底部的位置,所述把手设置在车厢顶部;所述清洁装置包括清洁室、轮轴、清洁刷、清洁轮、入气口、集尘盒、出气口、抽气机,所述清洁轮安装在所述轮轴上,清洁轮表面设置有清洁刷,清洁轮设置在所述清洁室的内部,清洁室的后部开设有一个入气口,在入气口的后侧为所述集尘盒,在集尘盒的后侧设置有出气口,在出气口的外侧安装有所述抽气机;所述集尘盒包括集尘室、单向门、隔尘棉和除尘盒,所述隔尘棉和除尘盒安装在所述集尘室的底部,所述单向门安装在集尘室的端部;所述充电装置包括充电口、充电柱、毫米波雷达、图像采集器和信号灯,所述毫米波雷达用于感测清洁车周围障碍物情况,并根据感测得到的障碍物情况规划充电行驶路线,所述图像采集器用于采集清洁车前方充电头图像,并根据采集到的图像与预设图像进行匹配,判断清洁车的充电口是否对准充电头,若没有对准,则微调清洁车的姿态使其对准充电头。
[0005]
进一步的,所述报警灯为闪烁灯,当清洁车出现异常状况时开始闪烁。
[0006]
进一步的,所述报警灯还包括蜂鸣装置,当清洁车出现异常状况时开始蜂鸣。
[0007]
进一步的,所述控制面板用于设置清洁车的行驶路线,充电时机,清洁模式。
[0008]
进一步的,所述清洁刷沿所述清洁轮外表面等间距布置,一共布置六个清洁刷。
[0009]
进一步的,所述信号灯当所述充电口对准充电头时亮起。
[0010]
进一步的,所述信号灯当所述充电口对准充电头时亮起绿灯,当充电出现异常时亮起红灯。
[0011]
与现有技术相比,该光伏发电站智能清洗机器人的自动充电装置具备如下有益效果:
[0012]
1、本实用新型通过充电口、充电柱、毫米波雷达、图像采集器和信号灯构成的充电装置能够实现清洁车的自动路径规划、自动避障以及自动充电,当清洁车电量低于阈值时自动规划路径寻找最近的充电头充电,并可以根据图像匹配实现充电口的精准对齐,免去了人工充电的繁琐,提高了工作效率和使用体验。
[0013]
2、本实用新型通过清洁室、轮轴、清洁刷、清洁轮、入气口、集尘盒、出气口、抽气机构成的清洁装置能够实现快速的除尘操作,且集尘盒为可取出设计,即在集尘盒装满时可以取出,存放在存物平台上,待所有集尘盒均装满时再集中处理,提高了除尘的工作效率,降低了工人的工作强度。
附图说明
[0014]
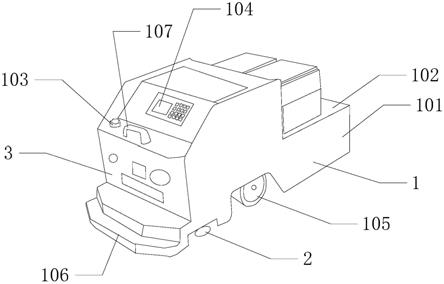
图1为本实用新型主结构示意图;
[0015]
图2为本实用新型清洁装置示意图;
[0016]
图3为本实用新型充电装置示意图;
[0017]
图中:1-清洁车,2-清洁装置,3-充电装置,101-车厢,102-存物平台,103
-ꢀ
报警灯,104-控制面板,105-行驶轮,106-防撞梁,107-把手,201-清洁室,202
-ꢀ
轮轴,203-清洁刷,204-清洁轮,205-入气口,206-集尘盒,2061-集尘室,2062
-ꢀ
单向门,2063-隔尘棉,2064-除尘盒,207-出气口,208-抽气机,301-充电口, 302-充电柱,303-毫米波雷达,304-图像采集器,305-信号灯。
具体实施方式
[0018]
请参阅图1-3,本实用新型提供一种技术方案:一种光伏发电站智能清洗机器人的自动充电装置,包括清洁车1、清洁装置2和充电装置3,清洁装置2安装在清洁车1的底部,充电装置3安装在清洁车1的前端;清洁车1包括车厢 101、存物平台102、报警灯103、控制面板104、行驶轮105、防撞梁106和把手107,存物平台102设置在车厢101的尾部位置,报警灯103安装在车厢101 的顶部前端,控制面板104设置在车厢101的顶部正上方,行驶轮105安装在车厢101的底部,防撞梁106安装在车厢101前端底部的位置,把手107设置在车厢101顶部;清洁装置2包括清洁室201、轮轴202、清洁刷203、清洁轮204、入气口205、集尘盒206、出气口207、抽气机208,清洁轮204安装在轮轴202 上,清洁轮204表面设置有清洁刷203,清洁轮204设置在清洁室201的内部,清洁室201的后部开设有一个入气口205,在入气口205的后侧为集尘盒206,在集尘盒206的后侧设置有出气口207,在出气口207的外侧安装有抽气机208;集尘盒206包括集尘室2061、单向门2062、隔尘棉2063和除尘盒2064,隔尘棉2063和除尘盒2064安装在集尘室2061的底部,单向门2062安装在集尘室 2061的端部;充电装置3包括充电口301、充电柱302、毫米波雷达303、图像采集器304和信号灯305,毫米波雷达303用于感测清洁车1周围障碍物情况,并根据感测得到的障碍物情况规划充电行驶路线,图像采集器304用于采集清洁车1前方充电头图像,并根据采集到的图像与预设图像进行匹配,判断清洁车1 的充电口301是否对准充电头,若没有对准,则微调清洁车1的姿态使其对准充电头。报警灯103为闪烁灯,当清洁车1出现异常状况时开始闪烁。报警灯103 还包括蜂鸣装置,当清洁车1出现异常状况时开始蜂鸣。控制面板104用于设置清洁车1的行驶路线,充电时机,清洁模式。清洁刷203沿清洁轮204外表面等间距布置,一共布置六个清洁刷203。信号
灯305当充电口301对准充电头时亮起。信号灯305当充电口301对准充电头时亮起绿灯,当充电出现异常时亮起红灯。通过充电口301、充电柱302、毫米波雷达303、图像采集器304和信号灯 305构成的充电装置3能够实现清洁车1的自动路径规划、自动避障以及自动充电,当清洁车电量低于阈值时自动规划路径寻找最近的充电头充电,并可以根据图像匹配实现充电口的精准对齐,免去了人工充电的繁琐,提高了工作效率和使用体验。本实用新型通过清洁室201、轮轴202、清洁刷203、清洁轮204、入气口205、集尘盒206、出气口207、抽气机208构成的清洁装置2能够实现快速的除尘操作,且集尘盒206为可取出设计,即在集尘盒206装满时可以取出,存放在存物平台102上,待所有集尘盒206均装满时再集中处理,提高了除尘的工作效率,降低了工人的工作强度。
[0019]
使用时,先利用控制面板104设置好清洁车1的清洁路线、充电阈值,然后即可开启清洁车1的清洁工作,当清洁车1电量低于充电阈值时,清洁车1会利用毫米波雷达303自动规划路径并寻找充电头,当清洁车1靠近充电头时利用图像采集器304采集充电头图像并于自身充电口301图像匹配,并微调清洁车1 姿态使其精确对准充电头,然后开始充电。
[0020]
综上,通过充电口301、充电柱302、毫米波雷达303、图像采集器304和信号灯305构成的充电装置3能够实现清洁车1的自动路径规划、自动避障以及自动充电,当清洁车电量低于阈值时自动规划路径寻找最近的充电头充电,并可以根据图像匹配实现充电口的精准对齐,免去了人工充电的繁琐,提高了工作效率和使用体验。本实用新型通过清洁室201、轮轴202、清洁刷203、清洁轮204、入气口205、集尘盒206、出气口207、抽气机208构成的清洁装置2能够实现快速的除尘操作,且集尘盒206为可取出设计,即在集尘盒206装满时可以取出,存放在存物平台102上,待所有集尘盒206均装满时再集中处理,提高了除尘的工作效率,降低了工人的工作强度。
[0021]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0022]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1