一种基于模糊切换策略的永磁同步电机复合变结构控制方法
1.本发明属于控制技术领域,具体涉及一种基于模糊切换策略的永磁同步电机复合变结构控制方法。
背景技术:
2.永磁同步电机是一种利用永磁体建立励磁磁场的同步电机,相比其他电机具有显著的优势,如:结构简单、运行可靠、调速范围宽、应用范围广等。近年来,永磁同步电机得到了飞速发展并广泛应用于各种场合,尤其是以高性能和高精度为基本特征的领域,如数控机床、光电转台、雷达卫星、望远镜控制系统等。为使永磁同步电机表现出更优良的性能,对控制系统的要求也越来越高。在工程上,目前电机控制系统最普遍采用的调速控制策略仍然是经典的pid控制,其工作原理是,根据被控量与给定参考指标的偏差,利用比例参数与积分参数,生成控制量,达到缩减误差并消除稳态误差的控制效果。pid控制策略具有结构简单,控制性能好,参数少且物理意义明确等优点,但也带来了响应速度与超调量无法同时兼顾以及抗干扰性能差等问题。而ip控制器通过将比例控制作用移到反馈通道中,减小了传统pi控制器中微分项的作用,有效减小了超调量,但响应速度相对较慢。基于pi与ip设计多模变结构控制器能够综合pi和ip控制器的优点,则能解决这个矛盾。
3.多模变结构控制器的基本原理兼顾暂态响应的快速性、平稳性和稳态响应的无差性、稳定性,能够对应解决传统线性pi控制器的问题,但常规的多模控制切换又存在着如下问题:(1)多模控制的切换阈值是程序根据事先给定的偏差范围自动切换。阈值应选得恰当,否则不易解决系统响应的快速性与超调的矛盾。(2)在不同的控制器进行切换时,为了使控制量的输出连续,必须保证在该点相互切换的两种控制器的输出控制量应该相等以防止输出量的跃变。实际上,当闭环控制系统由一种控制方式向另一种控制方式进行切换时,要使控制器输出连续是较困难的,因为很难做到使相互切换的两种控制器输出相等并且使它们的输出变化趋势一致。因此常规的多模切换一般难以实现无扰动切换,从而延长了系统的调节时间。因此,基于多模变结构控制原理设计一种合适的多模控制器,对永磁同步电机有着重要意义。
4.目前,针对永磁同步电机的上述问题,国内外专家学者提出很多控制方法。文章《复合控制一种简便模糊控制方法》设计一种具有模糊切换的复合控制器,根据误差量e的大小调节pid控制器与模糊控制器的输出强度系数,从而实现两种控制器的无扰切换。与常规复合控制器相比,该复合控制在响应速度和超调量方面均有优化,但并未完全消除超调。公开号为cn104880944a的专利提出了一种变结构控制形式,可以实现在pi和ip控制器之间的切换,但其主要针对的是解决超调量与跟踪连续变化输入的问题,并未充分考虑外部干扰的影响。
技术实现要素:
5.本发明要解决的技术问题是:针对永磁同步电机使用传统线性pi控制器时响应速
度与超调量无法同时兼顾以及抗干扰性能差的问题,提供一种基于模糊切换策略的永磁同步电机复合变结构控制方法,消除超调,实现无扰切换,保证响应速度与速度跟踪精度,同时提高永磁同步电机抗干扰性能。该方法具有结构简单、抗干扰能力强和易于实现等优点。
6.本发明解决上述技术问题采用的技术方案为:一种基于模糊切换策略的永磁同步电机复合变结构控制方法,包括pi控制器、ip控制器、模糊切换控制器和干扰观测器。通过永磁同步电机设计干扰观测器,对速度环外部干扰进行实时估计与补偿;然后基于多模变结构控制原理设计一种变结构控制器,同时设计一个模糊切换控制器,通过在电机响应过程中切换pi与ip控制器,达到消除超调、实现无扰切换、保证响应速度的目的;最后将干扰估计值与变结构控制器输出进行复合,保证永磁同步电机跟踪精度。
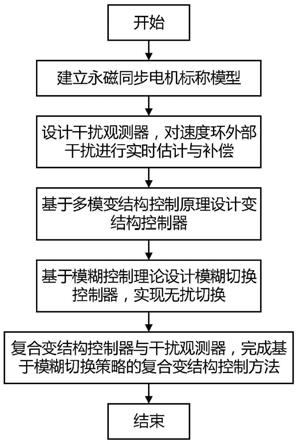
7.具体包括以下步骤:
8.第一步,建立永磁同步电机标称模型;
9.第二步,设计干扰观测器,对电机速度环外部干扰进行实时估计与补偿,得到干扰估计值;
10.第三步,基于多模变结构控制原理设计变结构控制器,通过在电机响应过程中切换pi与ip控制器,消除超调,保证电机响应速度;
11.第四步,基于模糊控制理论建立模糊规则,针对第三步pi与ip控制器切换过程设计模糊切换控制器,保证切换的平滑性;
12.第五步,将第二步获得的干扰估计值与变结构控制器输出进行复合,得到基于模糊切换策略的复合变结构控制器,保证永磁同步电机的跟踪精度。
13.针对永磁同步电机系统,利用离线参数辨识法,辨识定子电阻、转动惯量等相关参数信息,建立永磁同步电机标称模型;其次,设计干扰观测器,对电机速度环外部干扰进行实时估计与补偿,得到干扰估计值;再次,基于多模变结构控制原理设计变结构控制器,通过在电机响应过程中切换pi与ip控制器,消除超调,保证电机响应速度;然后,基于模糊控制理论建立模糊规则,针对pi与ip控制器切换过程设计模糊切换控制器,保证切换的平滑性;最后,将第二步获得的干扰估计值与变结构控制器输出进行复合,得到基于模糊切换策略的复合变结构控制器,保证永磁同步电机的跟踪精度。
14.其实施步骤如下:
15.第一步,建立永磁同步电机标称模型。
[0016][0017]
其中,i
d
,i
q
分别为定子电流d,q轴分量;u
d
,u
q
分别为定子电压d,q轴分量;l为定子轴电感;r为定子电阻;ω为永磁同步电机角速度;n
p
为磁极对数;ψ
f
为磁链量;j为永磁同步
电机转动惯量;分别为d轴电流、q轴电流和角速度对时间的一阶导数;t
e
为永磁同步电机输出的电磁转矩;d
s
为速度环所受总干扰。
[0018]
第二步,设计干扰观测器,对电机速度环外部干扰进行实时估计与补偿,得到干扰估计值。
[0019][0020]
其中,q(s)为低通滤波器;τ为低通滤波器常值系数;q
inv
(s)为低通滤波器与电机名义模型的逆相乘;为总干扰d
s
的估计值;p(s)为由永磁同步电机标称模型推导出的传递函数。
[0021]
第三步,基于多模变结构控制原理设计变结构控制器,通过在电机响应过程中切换pi与ip控制器,消除超调,保证电机响应速度。
[0022]
所述变结构控制器包括一个pi控制器和一个ip控制器,采用模糊切换来保证pi与ip控制器的平稳过渡。
[0023][0024]
其中,u
pi
和u
ip
分别为pi和ip控制器的控制输出;k
p
为比例系数;k
i
为积分系数;e为转速误差;ω
out
为永磁同步电机输出转速;s为拉氏变换复变量算子。
[0025]
pi与ip控制器的切换根据输出转速ω
out
的大小按照固定的模糊逻辑公式进行切换,采用加权的方式进行叠加。将pi控制器与ip控制器的控制输出与对应的权重系数相乘再求和得出实际控制输出,可通过下式得出:
[0026]
u
vspi
=(1
‑
ε)u
pi
+εu
ip
[0027]
其中,u
vspi
为变结构控制器的实际控制输出;1
‑
ε和ε分别为pi控制器和ip控制器的权重系数。权重系数ε随速度的增大由0增至1,所以在系统响应初期,pi控制器起主要作用,保证响应过程的快速性。随着响应过程的进行,pi的控制作用减弱,ip的控制作用增强。在接近期望速度值时,ip控制器起主要作用,消除超调,同时响应进入稳态后,仅ip控制器起作用。所以此变结构控制器在起始时保留了pi控制器响应的快速性,在期望值附近保留了ip控制器无超调的优点。
[0028]
第四步,基于模糊控制理论建立模糊规则,针对第三步pi与ip控制器切换过程设计模糊切换控制器,保证切换的平滑性。
[0029]
基于模糊控制理论,选用均匀分布的三角形隶属度函数并建立模糊规则:将输出转速ω
out
作为模糊切换控制器输入,ip控制器的权重系数ε作为输出,分别对模糊切换控制
器的输入和输出设定基本论域、模糊子集;
[0030]
ω
out
的基本论域定为{0,ω
*
}、模糊子集定为{nb,nm,ns,no,o,po,ps,pm,pb},其中ω
*
为期望速度值;
[0031]
ε的基本论域定为{0,1}、模糊子集定为{nb,nm,ns,no,o,po,ps,pm,pb}。
[0032]
并按如下的模糊控制规则进行切换:
[0033]
若“速度ω
out”为“极小(nb)”,则“权重系数ε”为“极小(nb)”;
[0034]
若“速度ω
out”为“非常小(nm)”,则“权重系数ε”为“非常小(nm)”;
[0035]
若“速度ω
out”为“相当小(ns)”,则“权重系数ε”为“相当小(ns)”;
[0036]
若“速度ω
out”为“比较小(no)”,则“权重系数ε”为“比较小(no)”;
[0037]
若“速度ω
out”为“中(o)”,则“权重系数ε”为“中(o)”;
[0038]
若“速度ω
out”为“比较大(po)”,则“权重系数ε”为“比较大(po)”;
[0039]
若“速度ω
out”为“相当大(ps)”,则“权重系数ε”为“相当大(ps)”;
[0040]
若“速度ω
out”为“非常大(pm)”,则“权重系数ε”为“非常大(pm)”;
[0041]
若“速度ω
out”为“极大(pb)”,则“权重系数ε”为“极大(pb)”。
[0042]
在切换过程中,随着速度的增加,可以得到pi控制器与ip控制器不同的输出权重系数,然后经过系数加权平均,得到如第三步所述的变结构控制器混合输出。而随着速度的增加,pi控制器的权重系数1
‑
ε从1降为0,ip控制器的权重系数ε从0升为1,从而完成由pi控制器到ip控制器的切换。
[0043]
第五步,将第二步获得的干扰估计值与变结构控制器输出进行复合,得到基于模糊切换策略的复合变结构控制器,保证永磁同步电机的跟踪精度:
[0044][0045]
其中,u
v
为永磁同步电机复合控制器;u
vspi
为变结构控制器的实际控制输出;为速度环所受总干扰d
s
的估计值;n
p
为磁极对数;ψ
f
为磁链量。
[0046]
本发明与现有技术相比的优点在于:本发明基于模糊切换策略的复合变结构控制设计,对永磁同步电机使用传统线性pi控制器时响应速度与超调量无法同时兼顾以及抗干扰性能差的问题设计干扰观测器,提高永磁同步电机抗干扰性能,并设计变结构控制器,通过在电机响应过程中切换pi与ip控制器,消除超调,实现无扰切换,保证永磁同步电机的响应速度。该方法具有结构简单、抗干扰能力强和易于实现等优点。
附图说明
[0047]
图1为本发明的基于模糊切换策略的永磁同步电机复合变结构控制方法流程图;
[0048]
图2为本发明的干扰观测器设计框图;
[0049]
图3为本发明的永磁同步电机解耦控制后系统框图(pi控制器);
[0050]
图4为本发明的永磁同步电机解耦控制后系统框图(ip控制器);
[0051]
图5为本发明的基于模糊切换策略的永磁同步电机复合变结构控制方法示意图;
[0052]
图6为本发明的永磁同步电机速度跟踪性能图。
具体实施方式
[0053]
下面结合附图以及具体实施方式进一步说明本发明。
[0054]
本发明提出的一种基于模糊切换策略的永磁同步电机复合变结构控制方法步骤为:
[0055]
针对永磁同步电机系统,利用离线参数辨识法,辨识定子电阻、转动惯量等相关参数信息,建立永磁同步电机标称模型;其次,设计干扰观测器,对电机速度环外部干扰进行实时估计与补偿,得到干扰估计值;再次,基于多模变结构控制原理设计变结构控制器,通过在电机响应过程中切换pi与ip控制器,消除超调,保证电机响应速度;然后,基于模糊控制理论建立模糊规则,针对pi与ip控制器切换过程设计模糊切换控制器,保证切换的平滑性;最后,将第二步获得的干扰估计值与变结构控制器输出进行复合,得到基于模糊切换策略的复合变结构控制器,保证永磁同步电机的跟踪精度。
[0056]
如图1所示,本发明具体实施步骤如下:
[0057]
第一步,建立永磁同步电机标称模型。
[0058][0059]
其中,i
d
,i
q
分别为定子电流d,q轴分量;u
d
,u
q
分别为定子电压d,q轴分量;l为定子轴电感,取值为l=0.72mh;r为定子电阻,取值为r=6ω;ω为永磁同步电机角速度;n
p
为磁极对数,取值为n
p
=4;ψ
f
为磁链量,取值为ψ
f
=0.175wb;j为永磁同步电机转动惯量,取值为j=0.8kg
·
m2;分别为d轴电流、q轴电流和角速度对时间的一阶导数;t
e
为永磁同步电机输出的电磁转矩;d
s
为速度环所受总干扰,取值为d=(0.6sin(700t)+0.5sint+0.4sin(3t))n
·
m+t
n
+t
f
,其中t
n
为10s时添加的常值干扰,取值为t
n
=8n
·
m,t
f
为非线性摩擦干扰力矩,采用lugre摩擦模型:其中,z为不可测变量,v代表转速,v
s
代表stribeck速率,取值为v
s
=0.01,σ0代表刚毛刚度,取值为σ0=260,σ1和σ2分别代表微粘滞系数和粘滞系数,取值为σ1=2.5,σ2=0.02,f
c
和f
s
代表库伦摩擦力和静摩擦力矩,取值为f
c
=0.1,f
s
=0.01。
[0060]
第二步,如图2所示,设计干扰观测器,对电机速度环外部干扰进行实时估计与补偿,得到干扰估计值。
[0061][0062]
其中,q(s)为低通滤波器;τ为低通滤波器常值系数,取值为τ=0.001;q
inv
(s)为低通滤波器与电机名义模型的逆相乘,取值为相乘,取值为为总干扰d
s
的估计值;p(s)为由永磁同步电机标称模型推导出的传递函数。
[0063]
第三步,基于多模变结构控制原理设计变结构控制器,系统整体控制框图如图5所示,通过在电机响应过程中切换pi与ip控制器,消除超调,保证电机响应速度。
[0064]
所述变结构控制器包括一个pi控制器(结构如图3所示)和一个ip控制器(结构如图4所示),采用模糊切换来保证pi与ip控制器的平稳过渡。
[0065][0066]
其中,u
pi
和u
ip
分别为pi和ip控制器的控制输出;k
p
为比例系数,取值为k
p(pi)
=3,k
p(ip)
=6;k
i
为积分系数,取值为k
i(pi)
=5,k
i(ip)
=14;e为转速误差;ω
out
为永磁同步电机输出转速;s为拉氏变换复变量算子。
[0067]
pi与ip控制器的切换根据输出转速ω
out
的大小按照固定的模糊逻辑公式进行切换,采用加权的方式进行叠加。将pi控制器与ip控制器的控制输出与对应的权重系数相乘再求和得出实际控制输出,可通过下式得出:
[0068]
u
vspi
=(1
‑
ε)u
pi
+εu
ip
[0069]
其中,u
vspi
为变结构控制器的实际控制输出;1
‑
ε和ε分别为pi控制器和ip控制器的权重系数。权重系数ε随速度的增大由0增至1,所以在系统响应初期,pi控制器起主要作用,保证响应过程的快速性。随着响应过程的进行,pi的控制作用减弱,ip的控制作用增强。在接近期望速度值时,ip控制器起主要作用,消除超调,同时响应进入稳态后,仅ip控制器起作用。所以此变结构控制器在起始时保留了pi控制器响应的快速性,在期望值附近保留了ip控制器无超调的优点。
[0070]
第四步,基于模糊控制理论建立模糊规则,针对第三步pi与ip控制器切换过程设计模糊切换控制器,保证切换的平滑性。
[0071]
基于模糊控制理论,选用均匀分布的三角形隶属度函数并建立模糊规则:将输出转速ω
out
作为模糊切换控制器输入,ip控制器的权重系数ε作为输出,分别对模糊切换控制器的输入和输出设定基本论域、模糊子集;
[0072]
ω
out
的基本论域定为{0,ω
*
}、模糊子集定为{nb,nm,ns,no,o,po,ps,pm,pb},其中ω
*
为期望速度值,取值为ω
*
=10;各模糊语言变量对应的隶属度曲线分别为nb:[
‑
1.25,
0,1.25],nm:[0,1.25,2.5],ns:[1.25,2.5,3.75],no:[2.5,3.75,5],o:[3.75,5,6.25],po:[5,6.25,7.5],ps:[6.25,7.5,8.75],pm:[7.5,8.75,10],pb:[8.75,10,11.25],其中各数值依次表示三角形隶属度曲线的左端点、顶点和右端点对应的坐标值。
[0073]
ε的基本论域定为{0,1}、模糊子集定为{nb,nm,ns,no,o,po,ps,pm,pb},其中各模糊语言变量对应的隶属度曲线分别为nb:[
‑
0.125,0,0.125],nm:[0,0.125,0.25],ns:[0.125,0.25,0.375],no:[0.25,0.375,0.5],o:[0.375,0.5,0.625],po:[0.5,0.625,0.75],ps:[0.625,0.75,0.875],pm:[0.75,0.875,1],pb:[0.875,1,1.125],其中各数值依次表示三角形隶属度曲线的左端点、顶点和右端点对应的坐标值。
[0074]
并按如下的模糊控制规则进行切换:
[0075]
若“速度ω
out”为“极小(nb)”,则“权重系数ε”为“极小(nb)”;
[0076]
若“速度ω
out”为“非常小(nm)”,则“权重系数ε”为“非常小(nm)”;
[0077]
若“速度ω
out”为“相当小(ns)”,则“权重系数ε”为“相当小(ns)”;
[0078]
若“速度ω
out”为“比较小(no)”,则“权重系数ε”为“比较小(no)”;
[0079]
若“速度ω
out”为“中(o)”,则“权重系数ε”为“中(o)”;
[0080]
若“速度ω
out”为“比较大(po)”,则“权重系数ε”为“比较大(po)”;
[0081]
若“速度ω
out”为“相当大(ps)”,则“权重系数ε”为“相当大(ps)”;
[0082]
若“速度ω
out”为“非常大(pm)”,则“权重系数ε”为“非常大(pm)”;
[0083]
若“速度ω
out”为“极大(pb)”,则“权重系数ε”为“极大(pb)”。
[0084]
在切换过程中,随着速度的增加,可以得到pi控制器与ip控制器不同的输出权重系数,然后经过系数加权平均,得到如第三步所述的变结构控制器混合输出。而随着速度的增加,pi控制器的权重系数1
‑
ε从1降为0,ip控制器的权重系数ε从0升为1,从而完成由pi控制器到ip控制器的切换。
[0085]
第五步,将第二步获得的干扰估计值与变结构控制器输出进行复合,得到基于模糊切换策略的复合变结构控制器,保证永磁同步电机的跟踪精度:
[0086][0087]
其中,u
v
为永磁同步电机复合控制器;u
vspi
为变结构控制器的实际控制输出;为速度环所受总干扰d
s
的估计值;n
p
为磁极对数,取值为n
p
=4;ψ
f
为磁链量,取值为ψ
f
=0.175wb。
[0088]
如图6所示,为永磁同步电机在期望转速为10r/min时采用本发明复合控制方法的速度跟踪性能图。由图6可以看出,响应曲线不存在超调量,且具有较快的响应速度,较小的跟踪误差,且能消除干扰的影响。说明本发明的控制方法能够解决超调量与响应速度不能同时兼顾的问题,且保证其稳态跟踪性能,提高系统抗干扰能力。
[0089]
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1