一种步进电机的制作方法
1.本发明涉及一种电机,尤其是涉及一种步进电机。
背景技术:
2.步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。
3.现有的步进电机中,两相步进电机中所有的定子主极构成两相绕组,电机一般开环运行,电机的位置无法监控,造成电机的震动和噪音过大、温升过高。
4.为了改善步进电机震动噪音以及温升问题,会选择步进电机加位置传感器的方案,但传感器的成本较高,会带来系统方案成本的增加。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种步进电机。
6.本发明的目的可以通过以下技术方案来实现:
7.根据本发明的一个方面,提供了一种步进电机,包括定子铁芯(1)和转子铁芯(4),所述的定子铁芯(1)上分布若干定子主极(2),所述的定子主极(2)上存在若干定子小齿(3),所述的转子铁芯(4)上分布若干转子小齿(5),所述的定子主极(2)包括用于电机产生转矩的动力定子主极和用于电机产生位置传感信号的位置传感定子主极。
8.作为优选的技术方案,所述的用于电机产生位置传感信号的位置传感定子主极设有至少两个;所述的位置传感定子主极上缠绕有用于获取位置信号的绕组。
9.作为优选的技术方案,所述的位置传感定子主极为四个时,产生两个位置信号,该两个位置信号与两相绕组产生的反电势相位固定,所述两个位置信号与两相绕组的反电势相位重合。
10.作为优选的技术方案,所述的位置传感定子主极为两个或两个以上时,产生一个位置信号,该一个位置信号与两相绕组产生的反电势相位固定,所述一个位置信号与两相绕组的反电势其中之一重合。
11.作为优选的技术方案,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
12.所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有三个定子小齿;
13.所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
14.15.作为优选的技术方案,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
16.所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有两个定子小齿;
17.所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0018][0019]
作为优选的技术方案,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
[0020]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有一个定子小齿;
[0021]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0022][0023]
作为优选的技术方案,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
[0024]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有三个定子小齿,其中c相位置传感定子主极上绕制位置信号绕组,d相位置传感定子主极上不绕制绕组;
[0025]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0026][0027]
作为优选的技术方案,所述的动力定子主极设有八个,所述的位置传感定子主极设有两个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组;
[0028]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组每个位置传感定子主极设有三个定子小齿;
[0029]
所述的a相绕组、b相绕组和c相绕组的相邻主极间的间隔角度如下:
[0030][0031]
作为优选的技术方案,所述的动力定子主极设有八个,所述的位置传感定子主极设有两个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
[0032]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有三个定子小齿,其中c相位置传感定子主极上绕制位置信号绕组,d相位置传感定子主极上不绕制绕组;
[0033]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0034][0035]
与现有技术相比,本发明具有以下优点:
[0036]
1)实现成本低,本发明利用电机自身的主极产生位置传感信号,降低了电机安装位置传感器的成本
[0037]
2)可靠性高,本发明电机的位置传感信号采用电机自身的绕组构成,位置传感方式的可靠性和电机相同
[0038]
3)性能好,本发明电机高速运行时,能利用位置传感信号进行控制,降低了电机的震动与噪音,提高了电机的功率密度。
附图说明
[0039]
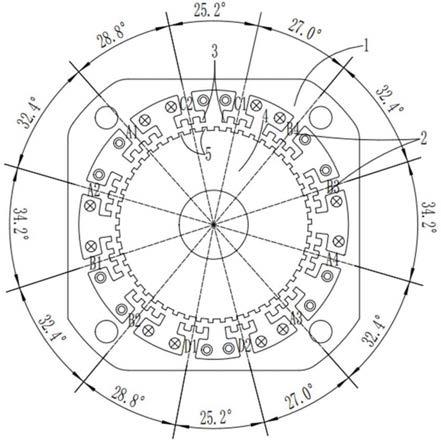
图1为本发明实施例1的结构示意图;
[0040]
图2为本发明实施例1的传感信号和反电势的位置关系示意图;
[0041]
图3为本发明实施例2的结构示意图;
[0042]
图4为本发明实施例3的结构示意图;
[0043]
图5为本发明实施例4的结构示意图;
[0044]
图6为本发明实施例4的传感信号和反电势的位置关系示意图;
[0045]
图7为本发明实施例5的结构示意图;
[0046]
图8为本发明实施例6的结构示意图;
[0047]
其中1为定子铁芯、2为定子主极、3为定子小齿、4为转子铁芯、5为转子小齿
具体实施方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实
施例,都应属于本发明保护的范围。
[0049]
如图1所示,一种步进电机,包括定子铁芯1和转子铁芯4,所述的定子铁芯1上分布若干定子主极2,所述的定子主极2上存在若干定子小齿3,所述的转子铁芯4上分布若干转子小齿5,所述的定子主极2包括用于电机产生转矩的动力定子主极和用于电机产生位置传感信号的位置传感定子主极。即本发明新的步进电机,在步进电机定子主极中,除了产生动力的主极以外,还设置了用于位置信号传感的主极。
[0050]
所述的用于电机产生位置传感信号的位置传感定子主极设有至少两个;所述的位置传感定子主极上缠绕有用于获取位置信号的绕组。
[0051]
所述的位置传感定子主极为四个时,产生两个位置信号,该两个位置信号与两相绕组产生的反电势相位固定,所述两个位置信号与两相绕组的反电势相位重合为最佳。
[0052]
所述的位置传感定子主极为两个或两个以上时,产生一个位置信号,该一个位置信号与两相绕组产生的反电势相位固定,所述一个位置信号与两相绕组的反电势其中之一重合为最佳。
[0053]
实施例1
[0054]
如图1所示,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;其中a相和b相绕组用于电机产生转矩,c相和d相绕组用于电机产生位置传感信号;
[0055]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有三个定子小齿,其中c相和d相主极上均绕制位置信号绕组,产生两个位置信号;
[0056]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0057][0058]
如图2所示,为c、d两相传感信号和a、b两相反电势的位置关系示意图,从图上可知,c、d两相传感信号和a、b两相反电势相位完全重合。
[0059]
实施例2
[0060]
如图3所示,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
[0061]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有两个定子小齿,其中c相和d相主极上均绕制位置信号绕组,产生两个位置信号;
[0062]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0063][0064]
实施例3
[0065]
如图4所示,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
[0066]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有一个定子小齿,其中c相和d相主极上均绕制位置信号绕组,产生两个位置信号;
[0067]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0068][0069]
实施例4
[0070]
如图5所示,所述的动力定子主极设有八个,所述的位置传感定子主极设有四个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
[0071]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有三个定子小齿,其中c相位置传感定子主极上绕制位置信号绕组,d相位置传感定子主极上不绕制绕组,产生一个位置信号;
[0072]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0073][0074]
如图6所示,为c相传感信号和a、b两相反电势的位置关系,从图上可知,,c相传感信号和a相反电势相位相同,和b相反电势相位相差90
°
电角度。
[0075]
实施例5
[0076]
如图7所示,所述的动力定子主极设有八个,所述的位置传感定子主极设有两个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组;
[0077]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组每个位置传感定子主极设有三个定子小齿,产生一个位置信号;;
[0078]
所述的a相绕组、b相绕组和c相绕组的相邻主极间的间隔角度如下:
[0079][0080]
实施例6
[0081]
如图8所示,所述的动力定子主极设有八个,所述的位置传感定子主极设有两个,其中动力定子主极a1、a2、a3、a4构成a相绕组,动力定子主极b1、b2、b3、b4构成b相绕组,位置传感定子主极c1、c2构成c相绕组,位置传感定子主极d1、d2构成d相绕组;
[0082]
所述的a相绕组和b相绕组上每个动力定子主极设有四个定子小齿,所述的c相绕组和d相绕组上每个位置传感定子主极设有三个定子小齿,其中c相位置传感定子主极上绕制位置信号绕组,d相位置传感定子主极上不绕制绕组,产生一个位置信号;
[0083]
所述的a相绕组、b相绕组、c相绕组和d相绕组的相邻主极间的间隔角度如下:
[0084][0085]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1