一种基于双向电力变换器的化成工艺滤波状态估计方法
1.本发明涉及一种基于双向电力变换器的化成工艺滤波状态估计方法,属于参数估计技术领域。
背景技术:
2.锂电池出厂前反复给锂电池进行充电和放电的过程称为化成,其目的是激活电池内部的化学能,并在碳阳极表面形成均匀的固体电解质界面(sei,solid electrolyte interface)。化成过程作为电池制造的关键工序,需要对可能影响电池品质的各因素进行实时监测调整,比如恒流充电的电流大小、充电时间、充电截止电压、搁置时间、放电电流等。
3.监测调整过程涉及到对上述参数的估计,而随着生产环境变得越来越复杂,不可避免地会产生各种各样的噪声,如电磁干扰、测量误差等。噪声的存在会影响电压或电流等参数的估计,从而影响判断电荷态(soc,state of charge)等化成质量的指标。
4.锂电池组化成过程的核心部件是双向dc
‑
dc变换器,它在适当的控制下实现直流功率的双向流动。根据能量流动的方向,可以将其转换为buck电路或boost电路。随着科学技术的发展,不间断电源系统、航空电源系统等场合对双向dc
‑
dc变换器的需求逐渐增加,并被广泛应用于电力系统、家电、航空航天、国防军工、工业控制等领域。可以通过对双向dc
‑
dc变换器的状态估计,判断化成过程的质量优劣。
5.传统对于非线性系统的状态参数估计是贝叶斯经典方法,例如扩展卡尔曼滤波、粒子滤波等,它要求对噪声的概率分布满足先验性高斯假设。但实际由于生产过程的复杂性和未知性,总不能得到噪声的精确分布,或者虽然已知噪声分布,但属于非高斯或非白噪声情况,这些情形使得基于概率的状态估计结果不精确甚至失灵。这些情况使得基于概率的状态估计结果不准确甚至失败,这导致了经典滤波算法的局限性。而集员辨识(smi,set
‑
membership identification)不需要知道噪声的特征,只要噪声有界,它就可以任意分布,因而被广泛的应用于各种未知噪声干扰的环境中进行状态参数估计。常用的smi算法包括椭球、全对称多胞体、区间、超平行体和正多胞体等。
6.但椭球和全对称多胞体算法保守性较大,其他算法如区间和超平行体存在计算量较大的缺点。除此,复杂生产环境中的未知噪声,如电磁干扰等,会影响传统化成参数的状态估计值,进而影响锂电池的出厂品质;因此,针对锂电池组化成过程中对于双向dc
‑
dc变换器的状态估计问题,需要一种新的方法以保证锂电池的出厂品质。
技术实现要素:
7.为解决传统全对称多胞体保守性较大以及生产环境中未知有界噪声对电池化成环节的干扰问题,本技术提出了一种基于双向电力变换器的化成工艺滤波状态估计方法,本技术方法基于全对称多胞体方法进行了新的改进,通过观测条带降低了估计结果的保守性,并通过重复利用下一时刻观测条带,基于观测条带位移全对称多胞体的对称面,对其进
行二次紧缩,实现了对于锂电池的化成参数更高效、准确地估计,从而更进一步的保证了锂电池的出厂品质。
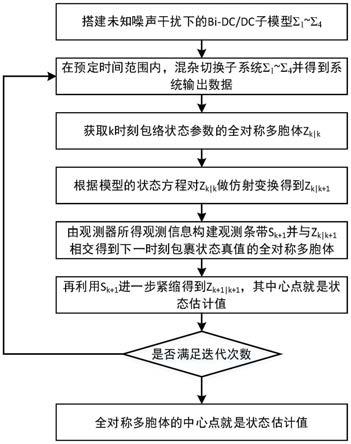
8.一种基于双向电力变换器的化成工艺滤波状态估计方法,所述方法包括:
9.步骤一:搭建未知噪声干扰下的双向电力变换器bi
‑
dc/dc的子系统σ1~σ4的模型;
10.步骤二:获取子系统σ1~σ4下系统输出数据,并利用全对称多胞体z
k|k
包络k时刻状态参数,所述状态参数包括电感电流i
l
和电容电压u
c
;
11.步骤三:根据各子系统的状态方程对全对称多胞体z
k|k
做仿射变换得到z
k+1|k
;
12.步骤四:根据子系统σ1~σ4下系统输出数据构建观测条带s
k+1
,并与z
k+1|k
相交得到下一时刻包裹状态真值的全对称多胞体;
13.步骤五:利用观测条带s
k+1
进一步紧缩得到z
k+1|k+1
,其中心点即为双向电力变换器bi
‑
dc/dc的状态估计值。
14.可选的,所述步骤一包括:
15.步骤1.1:搭建未知噪声干扰下的双向电力变换器bi
‑
dc/dc的通用模型:
[0016][0017]
其中,表示k时刻bi
‑
dc/dc的状态向量,包括电感电流i
l
和电容电压u
c
;表示k时刻的系统的观测值;a、b、c分别是系统参数矩阵,且c=[1 0];ω
k
为过程噪声,v
k
为观测噪声,二者均是未知有界量;
[0018]
步骤1.2:以bi
‑
dc/dc变换器分别处于buck模式和boost模式构建其子系统σ1~σ4。
[0019]
可选的,所述步骤二包括:
[0020]
步骤2.1:设置buck模式和boost模式的切换率,根据各子系统σ1~σ4对应的模型提取输出数据y
k+1
,即电感电流i
l
的观测值;
[0021]
步骤2.2:设k时刻状态估计值为构建全对称多胞体其中是全对称多胞体z
k|k
的中心点,h是形状矩阵,b
n
是n维盒子。
[0022]
可选的,所述步骤三包括:
[0023]
步骤3.1:构造过程噪声ω
k
的全对称多胞体z
w
;
[0024]
设过程噪声ω
k
的边界为ε
w
,包络ω
k
全对称多胞体为其中:
[0025]
p
ω
={0,0,
…
,0}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0026]
h
w
=diag{ε
w
,ε
w
,
…
,ε
w
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0027]
步骤3.2:构造仿射变换全对称多胞体z
k+1|k
;
[0028]
设k时刻包含状态参数的超平行体为带入式(1)的状态方程,将全对称多胞体z
k|k
线性变换后得到仿射变换全对称多胞体线性变换后得到仿射变换全对称多胞体
[0029]
可选的,所述步骤四包括:
[0030]
步骤4.1:根据步骤2.1中提取到的系统输出数据得到线性观测集合:
[0031][0032]
其中
[0033][0034][0035]
变量上标j表示此向量的第j个元素,表示v
k
第j个元素的边界值;
[0036]
步骤4.2:将步骤4.1得到的s
k+1
分解为m个条带,并依次与步骤3.2构造的仿射变换全对称多胞体z
k+1|k
相交:
[0037][0038]
可选的,所述步骤五包括:
[0039]
步骤5.1:采用奇异值分解求解相交后的多面体的外包全对称多胞体,记为z
k+1|k
↓
,其中心点为形状矩阵为
[0040]
步骤5.2:令令m=1有p0和c0由公式(20)和(21)算出,其中j取0;
[0041]
步骤5.3:利用紧缩z
k+1|k
↓
:
[0042][0043][0044][0045][0046]
其中,h
i
为矩阵的第i列;表示、表示均为中间参数。
[0047]
可选的,所述步骤5.3包括:
[0048]
步骤1:得到紧缩条带表达式:
[0049][0050][0051]
步骤2:对于i=1,2,
…
,n,当p0h
i
=0时,全对称多胞体不紧缩,当p0h
i
≠0时,设置参量:
[0052]
[0053][0054]
得到紧缩后全对称多胞体表达式:
[0055][0056][0057]
紧缩后全对称多胞体的中心点即为状态估计值。
[0058]
可选的,所述各子系统σ1~σ4中各参数取值情况为:
[0059]
子系统σ1中:
[0060][0061][0062]
子系统σ2中:
[0063][0064]
b=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0065]
子系统σ3中:
[0066][0067][0068]
子系统σ4中:
[0069][0070][0071]
其中,e为双向电力变换器bi
‑
dc/dc的等效电路中的恒压源,r是负载电阻,l是电
感,c
b
是电容。
[0072]
可选的,设置过程噪声ω
k
的边界ε
w
和观测噪声v
k
的边界ε
v
值均为0.01。
[0073]
可选的,设置双向电力变换器bi
‑
dc/dc的buck模式和boost模式下的切换率为0.5。
[0074]
本发明有益效果是:
[0075]
本发明通过对bi
‑
dc/dc建立切换模型,使用一种改进的全对称多胞体集员辨识方法估计电感电流和电容电压的状态值,解决了未知分布噪声对电池化成参数soc、soh等干扰的问题;全对称多胞体集员估计方法表示状态可行集,不需要知道模型噪声的先验分布或要求噪声满足高斯分布,增加了状态估计的实用性和可靠性;并通过重复利用下一时刻观测条带,基于观测条带位移全对称多胞体的对称面,从而对其进行二次紧缩,避免了椭球、传统全对称多胞体等几何体集员辨识保守性大的问题,更高效、准确地对状态进行估计。
附图说明
[0076]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0077]
图1是本发明一个实施例中公开的一种基于双向电力变换器的化成工艺滤波状态估计方法的流程图。
[0078]
图2是本发明一个实施例中bi
‑
dc/dc变换器的电路拓扑图。
[0079]
图3是本发明一个实施例中bi
‑
dc/dc变换器处于buck模式下时采用本技术方法和现有esmi方法得到的电感电流的估计边界和真值的关系仿真图;
[0080]
图4是本发明一个实施例中bi
‑
dc/dc变换器处于buck模式下时采用本技术方法和现有esmi方法得到的电容电压的估计边界和真值的关系仿真图。
[0081]
图5是本发明一个实施例中bi
‑
dc/dc变换器处于buck模式下时二维状态量的变迁轨迹及其可行解集合仿真图。
[0082]
图6是本发明一个实施例中bi
‑
dc/dc变换器处于boost模式下时采用本技术方法和现有esmi方法得到的电感电流的估计边界和真值的关系仿真图。
[0083]
图7是本发明一个实施例中bi
‑
dc/dc变换器处于boost模式下时采用本技术方法和现有esmi方法得到的电容电压的估计边界和真值的关系仿真图;
[0084]
图8是本发明一个实施例中bi
‑
dc/dc变换器处于boost模式下时二维状态量的变迁轨迹及其可行解集合仿真图。
具体实施方式
[0085]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
[0086]
双向dc
‑
dc变换器(bi
‑
directional dc
‑
dc converter,bdc)是锂电池化成工艺过程的核心部件。它实现了电能的双向流动,是给锂电池反复充放电的关键。
[0087]
实施例一:
[0088]
本实施例提供一种基于双向电力变换器的化成工艺滤波状态估计方法,参见图1,所述方法包括:
[0089]
步骤一:搭建未知噪声干扰下的双向电力变换器bi
‑
dc/dc的子系统σ1~σ4的模型。
[0090]
未知噪声干扰下的双向电力变换器bi
‑
dc/dc的通用模型为:
[0091][0092]
如图2所示的bi
‑
dc/dc变换器的电路拓扑图,其中,s1、s2为mosfet管,e为恒压源,r是负载电阻,l是电感,c
b
是电容,v0是输出电压,d1和d2是二极管。
[0093]
令x
k
=[i
l
,u
c
]
t
;列写图2所示电路拓扑的微分方程,即双向电力变换器bi
‑
dc/dc的状态方程:
[0094][0095]
其中,表示k时刻bi
‑
dc/dc的状态向量,包括电感电流i
l
和电容电压u
c
,分别以x
1,k
和x
2,k
表示,即a、b、c分别是系统参数矩阵,且c=[1 0]。
[0096]
本实施例中图2中元器件参数为e=20v,l=4mh,c
b
=40μf,r=30ω,设置过程噪声ω
k
的边界ε
w
和观测噪声v
k
的边界ε
v
值均为0.01。
[0097]
以下以bi
‑
dc/dc变换器分别处于buck模式和boost模式构建其子系统σ1~σ4。
[0098]
1.1:buck模式
[0099]
当图2中mosfet管s1始终导通时,此时bi
‑
dc/dc变换器运行在buck模式。buck模式根据s2是否导通分以下两种情况:
[0100]
(1)s2导通
[0101]
以采样时间为t离散化电路模型,构建子系统σ1。此时式(1)中参数为:
[0102][0103][0104]
令
[0105][0106][0107]
式(2)~(5)带入式(1)进行离散化,取采样时间t=0.1ms。构造观测器并考虑过程
噪声ω
k
和观测噪声v
k
得到子系统σ1:
[0108][0109]
(2)s2关断
[0110]
此时式(1)中参数为:
[0111][0112]
b=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0113]
同样以采样时间为t=0.1ms进行离散化,得到子系统σ2:
[0114][0115]
1.2:boost模式
[0116]
当图2中mosfet管s2始终导通时,此时bi
‑
dc/dc变换器运行在boost模式。同样,boost模式下根据s2是否导通也分以下两种情况:
[0117]
(1)s1导通。
[0118]
此时式(1)中参数为:
[0119][0120][0121]
同理构建子系统σ3:
[0122][0123]
(2)s1关断。
[0124]
此时式(1)中参数为:
[0125]
[0126][0127]
同理构建子系统σ4:
[0128][0129]
步骤二:获取子系统σ1~σ4下系统输出数据,并利用全对称多胞体z
k|k
包络k时刻状态参数x
1,k
和x
2,k
,即电感电流i
l
和电容电压u
c
,具体包括;
[0130]
2.1,buck模式和boost模式下均将切换率设置为0.5,即buck(或boost)模式下s2(s1)交替导通与关断,一个周期导通与关断时间片比例为1:1,在此前提条件下根据模型提取输出数据y
k+1
,即电感电流i
l
的观测值,用来构建观测条带s
k+1
。
[0131]
2.2,设k时刻状态估计值为构建全对称多胞体其中是中心点,h是形状矩阵,b
n
是n维盒子。
[0132]
步骤三:根据各子系统的状态方程对全对称多胞体z
k|k
做仿射变换得到z
k+1|k
,包括:
[0133]
3.1,构造过程噪声ω
k
的全对称多胞体z
w
。
[0134]
设过程噪声ω
k
的边界为ε
w
,包络ω
k
全对称多胞体为其中:
[0135]
p
ω
={0,0,
…
,0}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0136]
h
w
=diag{ε
w
,ε
w
,
…
,ε
w
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0137]
3.2,构造仿射变换全对称多胞体z
k+1|k
。
[0138]
设k时刻包含状态参数的超平行体为带入式(1)的状态方程,将z
k|k
线性变换后得到
[0139]
步骤四:由观测器所得观测信息构建观测条带s
k+1
,并与z
k|k+1
相交得到下一时刻包裹状态真值的全对称多胞体,包括:
[0140]
根据步骤2.1中提取到的系统输出数据得到线性观测集合:
[0141][0142]
其中
[0143][0144][0145]
变量上标j表示此向量的第j个元素,表示v
k
第j个元素的边界值,c为系统参数矩阵[1 0]。将s
k+1
分解为m个条带,并依次与z
k+1|k
相交:
[0146][0147]
以m=1,即为案例,说明具体措施:
[0148][0149][0150][0151]
步骤五:再利用s
k+1
进一步紧缩得到z
k+1|k+1
,其中心点即为状态估计值,包括:
[0152]
5.1,奇异值分解(singular value decomposition,svd)求解相交后的多面体的外包全对称多胞体,记为z
k+1|k
↓
,其中心点为形状矩阵为
[0153]
5.2,令令m=1有p0和c0由公式(20)和(21)算出(j=0)。
[0154]
利用紧缩z
k+1|k
↓
:
[0155][0156][0157][0158][0159]
步骤1:得到紧缩条带表达式:
[0160][0161][0162]
步骤2:对于i=1,2,
…
,n,当p0h
i
=0时,全对称多胞体不紧缩,当p0h
i
≠0时,设置参量:
[0163][0164][0165]
得到紧缩后全对称多胞体表达式:
[0166][0167]
[0168]
紧缩后的全对称多胞体的中心点即为采用本技术方法得到的状态估计值。
[0169]
本实施例提供的基于bi
‑
dc/dc的化成工艺滤波状态估计方法在进行状态估计时,需要获取预设时间段内系统的观测输出数据,也即电感电流i
l
。系统实际的输出数据表示观测到的电感电流。
[0170]
为验证本技术对于锂电池化成工艺滤波状态估计结果具有更好的保守性,本技术进行了仿真实验,将采用本技术方法和采用现有的椭球集员辨识算法esmi(可参考zamora e,wen y.ellipsoid method for simultaneous localization and mapping of mobile robot[j].proceedings of the ieee conference on decision and control,2015,2015:5334
‑
5339.)进行状态估计的结果进行了对比:
[0171]
如图3
‑
图8所示,其中图3和图4分别是本实施例中bi
‑
dc/dc处于buck模式下时采用本技术方法和现有esmi方法得到的电感电流和电容电压的真值和估计边界的关系仿真图,图5是buck模式下二维状态量的变迁轨迹及其可行解集合。由图3和图4可以看出,相对于椭球集员辨识算法,本发明方法通过重复利用下一时刻观测条带,基于观测条带位移全对称多胞体的对称面,从而对其进行二次紧缩,得到的估计边界显然更加紧致,估计的保守性较小,准确度较高。由图5可以看出,系统可行集合均包裹真值且本发明所使用全对称集员辨识算法保守性更小。
[0172]
图6和图7分别是本实施例中bi
‑
dc/dc处于boost模式下时采用本技术方法和现有esmi方法得到的电感电流和电容电压的真值和估计边界,图8是boost模式下二维状态量的变迁轨迹及其可行解集合,同样由于本技术方法通过重复利用下一时刻观测条带,基于观测条带位移全对称多胞体的对称面,从而对其进行二次紧缩。可以看出本发明可以预测真值的趋势和范围,且估计出的边界更加紧致,保守性更好。
[0173]
由此可知,无论bi
‑
dc/dc处于buck模式下还是boost模式下,本技术方法都可以很好地跟踪真值的变化情况、估计真值并且有更小的保守性。
[0174]
本发明实施例中的部分步骤,可以利用软件实现,相应的软件程序可以存储在可读取的存储介质中,如光盘或硬盘等。
[0175]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1