一种电机全速域无传感位置估计与控制方法及系统
1.本发明属于电机控制领域,具体涉及一种电机全速域无传感位置估计与控制方法及系统。
背景技术:
2.永磁同步、直流无刷等电机因其功率密度高、体积小、调速性能好等特点,被广泛应用于工业中。为了获得电机转子位置和速度信息,通常需要在转轴上安装霍尔传感器、光电编码器、旋转变压器等位置传感器,既增加了电机尺寸,又增加了成本,且传感器在高温、高湿度、粉尘、振动、电磁干扰等恶劣环境下容易损坏,导致系统可靠性降低,因此,如何在不使用传感器的情况下实现电机的高性能控制是目前的一个研究热点和难点。
3.现有的无传感算法主要分为两类:一类是适用于电机中高速运行下的基于反电动势的估计方法。这种方法本质上是利用电机转子旋转时产生的反电动势直接计算或者构建观测器得到电机转子位置或者速度信息。此种方法通常采用传统的pid型锁相环技术,但是其在系统状态发生快速变化时无法准确且快速的跟踪转子的位置和速度信号。并且由于电机在低速运行时产生的反电动势信号较弱,测量过程中引入的噪声或者电机参数的不确定性会使得估计的位置和速度值产生较大的偏差,严重影响电机运行的平稳性,而在电机静止时,反电动势信号幅值为0,无法计算出此时的转子位置和速度。而另一类是适用于电机静止或低速运行状态下的高频信号注入法,这种方法利用的是电机的结构凸极性或者饱和凸极性,需要在原有磁场定向控制方法中的电压命令的基础上叠加高频信号。在电机凸极性的作用下,高频电压信号激励出的高频电流幅值或相位会随着转子位置的变化而变化。此时只需要对高频电流信号进行处理就可以得到转子的位置或速度,但是当电机转速较高时,电机旋转产生反电动势信号又会影响高频注入方法的估计精度。为了实现全速域的电机无传感控制,通常结合两种算法,并在两种方法的过渡区域采用线性加权算法进行估计位置和速度的切换。但是这种方法在切换过程中会产生较大的速度波动影响控制性能。此外,传统的无传感位置估计方法由于收敛速度较慢也限制了其快速响应的能力,不利于其应用于负载或输入需要快速变化的场景。
技术实现要素:
4.发明目的:本发明的目的在于提出一种电机全速域无传感位置估计与控制方法及系统,估计精度高、抗干扰能力好,且具有更强的抗噪声能力。
5.技术方案:本发明所述的一种电机全速域无传感位置估计与控制方法,包括以下步骤:
6.(1)通过转子磁链观测器提取电机中高速运行时的转子磁链的归一化信号;
7.(2)基于方波注入估计器提取电机零速、低速运行时的归一化高频电流导数包络线信号;
8.(3)基于归一化磁链和归一化包络线的非线性过渡算法完成零低速到中高速运行
的平稳切换;
9.(4)通过加入转子估计误差的高次项,增强电机全速域无传感位置估计与控制系统抗干扰能力、提高估计器收敛速度。
10.进一步地,所述步骤(1)包括以下步骤:
11.(11)建立电机的在两相静止坐标系下的基波数学模型:
[0012][0013][0014][0015]
其中,u
α
、u
β
和i
α
、i
β
分别是两相静止轴系下的定子电压和定子电流,r是定子相电阻,ld和lq分别是定子dq轴相电感,θe是转子电角度,ωe是转子电角速度,ψf是转子磁链;
[0016]
(12)建立降阶状态观测器
[0017][0018][0019][0020]
其中,γi(i=1
…
4)是观测器增益;是转子磁链矢量在静止两相坐标系下的投影;sgn(*)是取符号函数;是转子位置的估计值,是转子速度的估计值;
[0021]
(13)利用降阶状态观测器得到电机转子磁链大小:采用归一化方法对得到转子磁链进行处理得到归一化磁链信号f
cos
、f
sin
:
[0022][0023]
进一步地,所述步骤(2)实现过程如下:
[0024]
当注入信号频率较高时,忽略电机定子电阻和反电动势,建立电机高频信号模型:
[0025][0026]
其中,u
dh
、u
qh
和i
dh
、i
qh
分别是转子同步轴系下的定子电压高频分量和定子电流高
频分量;
[0027]
在估计的转子同步坐标系下的高频电压信号:
[0028][0029]
其中,v
inj
为注入方波电压的幅值,δt为采样时间间隔,n为当前采样次数;
[0030]
激励出的高频电流在静止αβ坐标系下的数学模型:
[0031][0032]
利用差分代替微分,并代入注入的高频信号可得
[0033][0034]
取其包络线并归一化得:
[0035][0036]
进一步地,所述步骤(3)实现过程如下:
[0037][0038][0039]gcos
=f
cos
*r+e
cos
(1-r)
[0040]gsin
=f
sin
*r+e
sin
(1-r)
[0041]
其中,ωd和ωu为切换过程的开始速度和结束速度,g
cos
、g
sin
分别为转子角度的正余弦信号,λ》0用于控制过渡阶段的切换速度,λ越大,切换越快。
[0042]
进一步地,所述步骤(4)实现过程如下:
[0043][0044]
δ2ω(k)=η1e(k)+η2e(k-1)+η3e(k-2)+η4e2(k)+η5e2(k-1)+η6e2(k-2)+η7e(k)*e(k-1)+η8e(k)e(k-2)+η9e(k-1)e(k-2)
[0045]
δω(k)=δω(k-1)+δ2ω(k)
[0046]
ω(k)=ω(k-1)+δω(k-1)+δ2ω(k)
[0047][0048]
其中,e(k)是第k次计算时的等效误差,ηi(i=1
…
9)为估计器参数。
[0049]
基于相同的发明构思,本发明还提出一种电机全速域无传感位置估计与控制系统,包括:速度环控制器、d轴电流环控制器、q轴电流环控制器、逆park变换模块、空间矢量脉冲宽度调制svpwm模块、三相逆变器、三相永磁同步电机、电流采样模块、park变换模块、低通滤波器lpf、高通滤波器hpf、clarke变换模块、转子磁链观测器、方波注入估计器和位置估计器;所述转子磁链观测器由微控制器算法实现,根据输入的电压、电流信号构建状态观测器,利用此观测器估计转子磁链矢量,并对其进行归一化;所述方波注入估计器由微控制器算法实现,对输入的高频电流信号进行处理,得到高频电流导数的包络线信号,并对其进行归一化;所述位置估计器根据输入的归一化磁链和归一化包络线信号,完成转子位置和速度的解算。
[0050]
有益效果:与现有技术相比,本发明的有益效果:相较于传统的锁相环技术,本发明估计精度高、抗干扰能力好,且具有更强的抗噪声能力;相较于卡尔曼滤波算法,计算效率高;能够同时适用于零速、低速、中速、高速运行状态,覆盖全速域;在电机从零低速到中高速运行的切换过程中,本发明采用了一种非线性过渡算法完成归一化磁链和归一化高频电流导数包络线这两路正余弦信号的平滑切换,相较于传统的基于角度切换的过渡策略,此方法切换过程平稳。
附图说明
[0051]
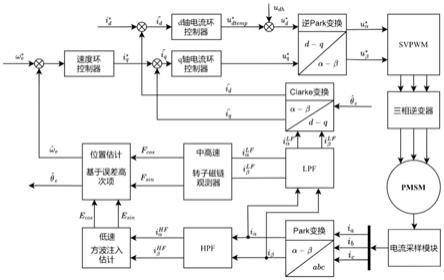
图1为电机全速域无传感位置估计与控制系统原理图;
[0052]
图2为方波注入估计器功能原理图;
[0053]
图3为位置估计器的功能原理图。
具体实施方式
[0054]
下面结合附图对本发明做进一步详细说明。
[0055]
本发明提出一种电机全速域无传感位置估计与控制系统,如图1所示,包括:速度环控制器、d轴电流环控制器、q轴电流环控制器、逆park变换模块、空间矢量脉冲宽度调制svpwm模块、三相逆变器、三相永磁同步电机、电流采样模块、park变换模块、低通滤波器lpf、高通滤波器hpf、clarke变换模块、转子磁链观测器、方波注入估计器和位置估计器。其中:速度环控制器由微控制器算法实现,主要功能是根据当前速度误差给定d轴电流命令值;d轴电流环控制器由微控制器算法实现,主要功能是根据当前d轴电流误差给定d轴电压命令;q轴电流环控制器由微控制器算法实现,主要功能是根据当前q轴电流误差给定q轴电压命令;逆park变换模块由微控制器算法实现,主要功能是将转子同步坐标系下的物理量变换至静止两相坐标系下;空间矢量脉冲宽度调制svpwm模块由微控制器算法实现,主要功能是根据给定的静止两相坐标系下的电压命令生成六路脉冲宽度调制pwm信号;三相逆变器可以利用驱动芯片+nmos管实现,主要功能是根据六路pwm信号完成三相电压控制;三相永磁同步电机是被控对象;电流采样模块利用电流传感器、采样电阻等方法获取永磁同步电机三相电流值;park变换模块由微控制器算法实现,主要功能是将静止三相坐标系下的物理量转换至静止两相坐标系下;低通滤波器lpf由微控制器算法实现,主要功能是滤除输
入信号中的高频分量;高通滤波器hpf由微控制器算法实现,主要功能是滤除输入信号中的低频分量;clarke变换模块由微控制器算法实现,主要功能是静止两相轴系下的物理量变换至转子同步坐标系下;转子磁链观测器由微控制器算法实现,主要功能是根据输入的电压、电流信号构建状态观测器,利用此观测器估计转子磁链矢量,并对其进行归一化;方波注入估计器由微控制器算法实现,主要功能是对输入的高频电流信号进行处理,得到高频电流导数的包络线信号,并对其进行归一化;位置估计器根据输入的归一化磁链和归一化包络线信号,完成转子位置和速度的解算。具体过程如下:
[0056]
首先,将给定的电角速度与位置估计器估算的角速度做差传入速度环控制器,得到交轴命令电流当采用id=0控制方法时(以id=0控制方法为例,但也可以采用其他控制算法,如滑模、模糊、模型参考自适应等),给定的直轴电流命令通过电流采样模块得到的三相线电流ia、ib、ic经过坐标变换得到实际的交直轴电流将测量的d轴电流与给定的电流命令相减,得到d轴电流误差将其传入d轴电流环控制器,得到d轴电压命令将测量的q轴电流与给定的电流命令相减,得到q轴电流误差将其传入q轴电流环控制器,得到q轴电压命令为了在静止或者低速下观测转子位置需要在d轴电压命令上叠加高频方波电压信号得到最终的dq轴电压命令值利用逆park变换模块,将dq轴的电压命令转换为αβ轴系下的电压命令将输入给svpwm模块中,得到六路pwm信号控制三相逆变电路以驱动pmsm电机。为了得到转子位置,需要利用电流采样模块获得pmsm电机三相电流ia、ib、ic。将三者作为输入传入clarke变换模块,得到两相静止坐标系下的定子电流i
α
、i
β
。利用低通滤波器滤除i
α
、i
β
中的高频分量得到两相电流的低频分量一方面将低频分量传入clarke变换模块得到转子同步坐标系下的电流信号作为电流环的反馈,另一方面将传入转子磁链观测器模块,完成中高速时的转子磁链估计。而在电机低速运行时,利用高通滤波器得到定子电流的高频分量传入方波估计器以得到归一化高频电流导数包络线信号e
cos
、e
sin
。在全速域范围内,将方波估计器输出的包络线信号e
cos
、e
sin
和磁链估计器输出的归一化转子磁链信号f
cos
、f
sin
传入位置估计器模块,得到转子位置和速度的估计值
[0057]
本发明还提出一种电机全速域无传感位置估计与控制方法,具体包括以下步骤:
[0058]
步骤1:通过转子磁链观测器提取电机中高速运行时的转子磁链的归一化信号。
[0059]
首先,建立电机的在两相静止坐标系下的基波数学模型:
[0060][0061][0062]
[0063]
其中,u
α
、u
β
和i
α
、i
β
分别是两相静止轴系下的定子电压和定子电流,r是定子相电阻,l0和l1分别是共模电感和差模电感,ld和lq分别是定子dq轴相电感,θe是转子电角度,ωe是转子电角速度,ψf是转子磁链,q(θe)是与转子位置相关的变换矩阵。
[0064]
根据上述模型建立如下降阶状态观测器:
[0065][0066][0067][0068]
其中,γi(i=1
…
4)是观测器增益;是转子磁链矢量在静止两相坐标系下的投影;sgn(*)是取符号函数;是转子位置的估计值,是转子速度的估计值。
[0069]
利用上述状态观测器得到电机转子磁链大小。为了降低电机转子磁链幅值变化对于位置估计器带宽的影响,本发明中采用归一化方法对得到转子磁链进行处理得到归一化磁链信号f
cos
、f
sin
:
[0070][0071]
步骤2:基于方波注入估计器提取电机零速、低速运行时的归一化高频电流导数包络线信号。
[0072]
在低速运行时,转子反电动势信号过小,需要借助额外的注入信号完成转子位置速度的闭环控制。本发明采用方波信号注入法,其高频信号解调方法如图2所示。当注入信号频率较高时,电机定子电阻和反电动势可以忽略,此时建立电机高频信号模型如下所示:
[0073][0074]
其中,u
dh
、u
qh
和i
dh
、i
qh
分别是转子同步轴系下的定子电压高频分量和定子电流高频分量。
[0075]
在估计的转子同步坐标系下如下式的高频电压信号:
[0076][0077]
其中,v
inj
为注入方波电压的幅值,δt为采样时间间隔,n为当前采样次数。
[0078]
激励出的高频电流在静止αβ坐标系下的数学模型如式:
[0079][0080]
利用差分代替微分,并代入注入的高频信号可得:
[0081][0082]
当估计误差时,上式可简化为:
[0083][0084]
取其包络线并归一化可得:
[0085][0086]
步骤3:基于归一化磁链和归一化包络线的非线性过渡算法完成零低速到中高速运行的平稳切换。
[0087]
在电机中高速运行时,反电动势信号较强,可以从归一化磁链信号f
cos
、f
sin
中提取转子的位置和速度,而在低速时,反电动势信号较弱,需要利用归一化包络线信号e
cos
、e
sin
得到转子位置和速度,如果直接从一种方法切换到另一种方法会使得估计位置、速度产生较大的波动,影响转子的平稳运行,因此本发明采用一种基于归一化磁链和归一化包络线的非线性过渡算法。
[0088][0089][0090]gcos
=f
cos
*r+e
cos
(1-r)
[0091]gsin
=f
sin
*r+e
sin
(1-r)
[0092]
其中,ωd和ωu为切换过程的开始速度和结束速度,λ(λ》0)是此过渡算法的参数,λ越大,切换过程越短。
[0093]
步骤4:通过加入转子估计误差的高次项,增强电机全速域无传感位置估计与控制系统抗干扰能力、提高估计器收敛速度。
[0094]
得到了关于转子角度的正余弦信号g
cos
、g
sin
之后,需要从两者中提取出转子的实
际位置和角速度信息。本发明采用一种基于误差高次项控制策略的位置估计算法,其形式下所示:
[0095][0096]
δ2ω(k)=η1e(k)+η2e(k-1)+η3e(k-2)+η4e2(k)+η5e2(k-1)+b6e2(k-2)+η7e(k)*e(k-1)+η8e(k)e(k-2)+η9e(k-1)e(k-2)
[0097]
δω(k)=δω(k-1)+δ2ω(k)
[0098]
ω(k)=ω(k-1)+δω(k-1)+δ2ω(k)
[0099][0100]
其中,e(k)是第k次计算时的等效误差,ηi(i=1
…
9)为估计器参数。
[0101]
在系统估计误差较小的时候,误差的高次项近似为0,此时算法中起主要作用的是前三个一次项。而当系统误差增大时,误差的高次项增长的更快,此时发挥主导作用的变成的误差的高次项,同样误差下的控制量更大,系统收敛更快。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1