一种仿生机器鱼无线充电系统
1.本实用新型涉及一种仿生机器鱼无线充电系统,属于仿生机器鱼技术领域。
背景技术:
2.鱼类经过自然界漫长的选择和进化,具有卓越的游动性能,可做出快速、高效、敏捷的多种游泳动作。鱼类高效的游动方式一直是人类所追求的目标,随着人们不断探索海洋的需求,越来越多的科研人员开始对水下仿生推进装置进行研究。相比于传统的螺旋桨推进方式,水下仿生机器鱼具有低噪声、高机动性和高效能的优势,可以满足水下航行器应对复杂水环境的要求。因此,机器鱼在开拓海洋环境、资源勘探等方面具有广阔的应用前景。
3.近年来,随着探索海洋进程的不断加快,科研人员对机器鱼的机械结构、控制策略等进行了广泛的研究,使机器鱼能够在人体无法到达的深海中进行长时间、广范围的相关探索作业。其中仿鯵科机器鱼因其效率高、噪声小、机动灵活及易于控制等特点成为了水下机器人研究的重要方向之一。
4.为了使机器鱼像真正的鱼一样具有卓越的游动性能,科研人员已经做了很多努力,但是目前仿生机器鱼存在机动性不高、效率低、能源供给不足等缺点。
技术实现要素:
5.本实用新型为了解决现有技术中存在的问题,提供一种机器鱼水下充电系统。
6.为了达到上述目的,本实用新型提出的技术方案为:一种仿生机器鱼无线充电系统,包括机器鱼、充电站和上位机;所述机器鱼、充电站均与上位机通信连接;所述机器鱼包括壳体和设置于壳体内部且互相电连接的第一控制器、电池组、次级线圈和驱动模块;所述充电站包括第二控制器、初级线圈、伺服电机、齿轮、爪型连杆和连杆支架,所述第二控制器与伺服电机电连接,所述齿轮与伺服电机输出轴连接,爪型连杆与齿轮啮合且滑动连接在连接支架上,所述初级线圈与电源连接;所述上位机获取机器鱼位置及电量信息,并向第一控制器发送控制信号,第一控制器控制驱动模块带动机器鱼靠近充电站,次级线圈与初级线圈产生磁场进行感应充电。
7.对上述技术方案的进一步设计为:所述充电站还包括第二控制器、伺服电机、齿轮、爪型连杆和连杆支架,所述第二控制器与上位机通信连接,所述伺服电机与第二控制器电连接,所述齿轮与伺服电机输出轴连接,爪型连杆与齿轮啮合且滑动连接在连接支架上,伺服电机带动爪型连杆沿连接支架滑动时,爪型连杆一端伸出充电站并抓住机器鱼。
8.所述充电站一侧设有供机器鱼进入的凹槽,所述滑槽前端设有挡板。
9.所述挡板上设有led灯,所述led灯与第二控制器连接。
10.该无线充电系统还包括通信基站,所述机器鱼内设有第一通信模块,充电站内设有第二通信模块,所述上位机通过通信基站分别与第一、第二通信模块通信连接。
11.所述机器鱼内设置有360度全视野相机、光敏传感器、超声波传感器及惯性测量单
元,所述360度全视野相机、光敏传感器、超声波传感器及惯性测量单元均与第一控制器电连接。
12.所述的第一、第二控制器均采用树莓派控制器,所述第一、第二通信模块均采用e39-ttl-100模块
13.本实用新型的有益效果是:
14.本实用新型基于电磁感应原理,采用无接触供电技术和水下无线通信技术,来引导机器鱼根据相机和传感器反馈信息改变机器鱼游动模式进入充电站,实现与充电站的自动对接,将充电站中的电能通过电磁耦合传输到机器鱼充电电池组上,供机器鱼水下长时间连续作业使用。
15.本实用新型解决了水下仿生机器鱼等新型水下载运装备的在水环境中的能源供给问题,根据现有的对无线静态充电技术的研究,采用无接触供电方式把充电器与电源用线圈代替,易于实现,适用于在水下仿生机器人中大面积推广。
附图说明
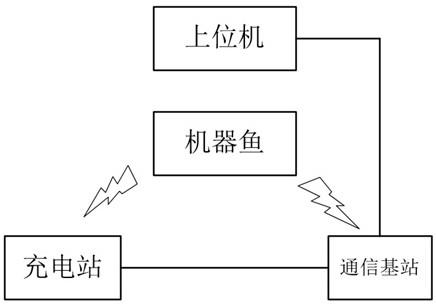
16.图1是机器鱼的无线充电系统结构示意图;
17.图2 是机器鱼结构示意图;
18.图3 是充电站结构示意图;
19.图4是充电站结构俯视图;
20.图5是充电站结构轴测图;
21.图6是机器鱼的无线充电系统原理图;
22.图中:1—相机、2—光敏传感器、3—惯性测量单元、4—压力传感器、5—电池组、6—次级线圈、7—驱动模块、8—尾鳍、9—背鳍、10—第一通信模块、11—第一控制器、12—超声波传感器、13—第二控制器、14—led灯、15—伺服电机、16—齿轮、17—爪型连杆、18—连杆支架、19—充电站、20—第二通信模块、21—初级线圈、22—凹槽。
具体实施方式
23.下面结合附图以及具体实施例对本实用新型进行详细说明。
实施例
24.本实施例公开了一种仿生机器鱼的无线充电系统,能够在水环境中进行无线充电,如图1所示,包括机器鱼、充电站、通信基站和上位机,上位机通过通信基站分别与机器鱼和充电站通信连接。
25.如图2所示,机器鱼头部设置有360度全视野相机1、光敏传感器2、超声波传感器12及惯性测量单元3,机器鱼中部设置有第一控制器11、充电电池组5、次级铁芯6和第一通信模块10,机器鱼尾部设置有驱动模块7,机器鱼背部设有背鳍9,尾部设有尾鳍8。机器鱼的第一控制器11根据360度全视野相机1、光敏传感器2、超声波传感器12及惯性测量单元3获得机器鱼的位置,并通过第一通信模块10传输给上位机,上位机向第一控制器11发送控制指令,第一控制器11通过驱动模块7改变机器鱼游动模式。
26.机器鱼中的第一控制器11密封设置在机器鱼外壳的内部,与充电电池组5相连接,
被用来控制驱动模块7驱动机器鱼前进,机器鱼控制器11通过第一通信模块10与充电站和上位机分别进行通信。
27.如图3、图4和图5所示,充电站包括凹槽22、初级铁芯20、第二控制器13、爪型连杆17、连杆支架18、齿轮16和伺服电机15;凹槽一端设有挡板,挡板上设有led灯14。
28.上位机通过机器鱼的第一控制器11采集机器鱼运动的位置、图像、速度、加速度、深度、电池电量、俯仰角等系信息,可通过水下通信基站向机器鱼发送控制信号;机器鱼根据接收到的上位机的控制指令驱动机器鱼改变游动模式。
29.本实施例无线充电系统的工作原理为:
30.机器鱼的第一控制器11与充电电池组5通过导线相连,用于控制360度全视野相机1处理数据图像,控制光敏传感器2和超声波传感器12分别感知充电站19 led灯14的亮度和自身与充电基站之间的距离;机器鱼控制器11检测充电电池组5的电量,当电池组5的电量低于总电量的20%时,机器鱼控制器11向充电站发送控制指令,机器鱼控制算法将从任务模式切换为快速巡游模式,充电站设置的第二控制器13接收指令控制led灯14打开并保持常亮,机器鱼360度全视野相机对捕获图像进行处理,机器鱼控制器11对图像、光敏传感器2和超声波传感器12反馈信息进行处理并规划路线靠近充电站19。
31.充电站19中设置有电源端子、电源端子与连接初级铁芯上缠绕的初级线圈21相连接来产生感应磁场,机器鱼根据相机1和各传感器反馈信息逐渐游动到充电站凹槽22中,充电站安装有led灯14的前挡板阻挡机器鱼继续前进,机器鱼设置的光敏传感器2和超声波传感器12感知当充电站led灯14亮度达到最大值及机器鱼充电站之间的距离最小时,机器鱼从任务模式切换为充电模式,机器鱼控制驱动模块7停止运动;机器鱼第一控制器11向充电站19发送控制指令,充电站的第二控制器13控制伺服电机15开始转动,伺服电机15轴上安装有齿轮16,齿轮16啮合连接有爪型连杆17,爪型连杆17滑动连接在连杆支架18上,连杆支架18固定在充电站19上,齿轮16旋转带动爪型连杆17在连杆支架18中伸出,两个爪型连17杆将机器鱼固定在凹槽22中,爪型连杆17伸出到极限位置时,控制器13控制伺服电机15停止转动同时使led灯14关闭。机器鱼中设置的次级线圈6与初级线圈21产生的磁场进行感应充电,充电原理如图6所示,当机器鱼控制器11检测到充电电池组5的电量达到总电量时,机器鱼从充电模式切换为任务模式,机器鱼第一控制器11向充电站19发送控制指令3,充电站第二控制器13控制伺服电机15反向转动带动爪型连杆17退回到充电站19中,完成充电过程。机器鱼开始自主游动。
32.本实施例中控制器都采用树莓派控制器,无线通信模块均采用e39-ttl-100模块;通信基站由路由器、控制器3,实现2.4ghz无线通信和以太网通信,通信基站利用无线电向机器鱼传递信息,其他组件在水下通过数据通信协议(uart)进行无线通信。
33.本实用新型的技术方案不局限于上述各实施例,凡采用等同替换方式得到的技术方案均落在本实用新型要求保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1