一种机器人自动焊接生产线的控制柜的制作方法
1.本实用新型属于自动焊接领域,具体来说,特别涉及一种机器人自动焊接生产线的控制柜。
背景技术:
2.焊接过程的机械化和自动化,是近代焊接技术的一项重要发展。它不仅标志着更高的焊接生产效率和更好的焊接质量,而且还大大改善了生产劳动条件。手工电弧焊过程,主要的焊接动作是引燃电弧、送进焊条以维持一定的电弧长度、向前移动电弧和熄弧,如果这几个动作都由机器来自动完成,则称为自动焊。
3.目前自动焊接技术日益发展,在自动焊接时,需要通过控制柜对焊接机器人进行操控,一般的控制柜大多只能固定在某一位置,不能根据需要移动,导致自动焊接受到限制,并且由于焊接常常采用高压电流,导致控制柜内部设备线路等市场发生短路,而短路的主要原因大多为灰尘和潮湿造成的短路,因此控制柜在使用时,防潮除尘极为重要。
4.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
5.针对相关技术中的问题,本实用新型提出一种机器人自动焊接生产线的控制柜,以克服现有相关技术所存在的上述技术问题。
6.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
7.本实用新型为一种机器人自动焊接生产线的控制柜,包括:控制柜本体,所述控制柜本体底部设置有进风处理室,所述进风处理室的底部设置有移动支撑组件,所述控制柜本体内腔两侧设置有吹风腔,所述吹风腔与所述进风处理室相连,所述控制柜本体背部设置有出风口,所述出风口背部设置有过滤板,所述控制柜本体正面设置有柜门。
8.进一步地,所述进风处理室包括净化液箱、除湿箱和气泵,所述净化液箱顶部一侧设置有通气管一,且所述通气管一深入所述净化液箱底部,所述通气管一另一端贯穿所述进风处理室一侧,所述净化液箱远离所述通气管一的一侧与所述除湿箱一侧顶部通过通气管二连接,所述除湿箱与所述气泵通过通气管三连接,所述气泵远离所述通气管三的一端设置有出气管,所述出气管另一端与所述吹风腔连接。
9.进一步地,所述移动支撑组件包括移动万向轮,所述移动万向轮位于所述进风处理室的底部周侧,所述进风处理室的内部周侧正对所述移动万向轮的位置设置有收纳槽,所述移动万向轮上方位于所述收纳槽内部,所述移动万向轮顶部与所述收纳槽之间设置有弹簧,所述进风处理室两外侧正对所述收纳槽开口的上方设置有限位槽,所述限位槽内部设置有限位块,所述收纳槽底部外侧设置有支撑腿。
10.进一步地,所述吹风腔位于所述控制柜本体的内腔两侧,所述吹风腔正对所述控制柜本体内部的一面设置有吹风孔,所述吹风腔底部设置有连接管,所述连接管分别与所述出气管连接。
等指示方位或位置关系,仅是为了便于描述实用新型和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对实用新型的限制。
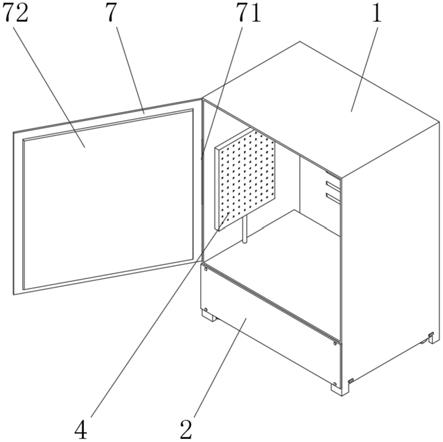
23.请参阅图1-4所示,本实用新型为一种机器人自动焊接生产线的控制柜,包括控制柜本体1,控制柜本体1底部设置有进风处理室2,进风处理室2的底部设置有移动支撑组件3,控制柜本体1内腔两侧设置有吹风腔4,吹风腔4与进风处理室2相连,控制柜本体1背部设置有出风口5,出风口5背部设置有过滤板6,控制柜本体1正面设置有柜门7。
24.在一个实施例中,对于述上进风处理室2来说,进风处理室2包括净化液箱21、除湿箱22和气泵23,净化液箱21顶部一侧设置有通气管一211,且通气管一211深入净化液箱21底部,通气管一211另一端贯穿进风处理室2一侧,净化液箱21远离通气管一211的一侧与除湿箱22一侧顶部通过通气管二221连接,除湿箱22与气泵23通过通气管三231连接,气泵23远离通气管三231的一端设置有出气管232,出气管232另一端与吹风腔4连接,利用气泵23抽气,外部空气首先通过通气管一211进入到净化液箱21中净化,然后通过通气管二221导入除湿箱22内,再通过通气管三231由气泵23和出气管232抽向吹风腔4内。
25.在一个实施例中,对于上述移动支撑组件3来说,移动支撑组件3包括移动万向轮31,移动万向轮31位于进风处理室2的底部周侧,进风处理室2的内部周侧正对移动万向轮31的位置设置有收纳槽24,移动万向轮31上方位于收纳槽24内部,移动万向轮31顶部与收纳槽24之间设置有弹簧32,进风处理室2两外侧正对收纳槽24开口的上方设置有限位槽241,限位槽241内部设置有限位块242,收纳槽24底部外侧设置有支撑腿25,利用收纳槽24对移动万向轮31在控制柜本体1平稳放置时,进行收纳,当需要移动控制柜本体1时,拉出限位块242,在弹簧作用下移动万向轮31伸出收纳槽24,然后再将限位块242插入限位槽241内,使移动万向轮31固定在收纳槽24外部,方便控制柜本体1的移动。
26.在一个实施例中,对于上述吹风腔4来说,吹风腔4位于控制柜本体1的内腔两侧,吹风腔4正对控制柜本体1内部的一面设置有吹风孔41,吹风腔4底部设置有连接管42,连接管42分别与出气管232连接,利用吹风腔4相对面的吹风孔41,将进风处理室2中抽入的气体直接通向控制柜本体1内的设备上,对设备进行直接降温,然后空气再从控制柜本体1背部的出风口5向外排出,其中出风口5背部设置的过滤板6,防止控制柜本体1外部的空气从出风口5进入到控制柜本体1内时,带有灰尘进入。
27.在一个实施例中,对于上述柜门7来说,控制柜本体1与柜门7通过合页71连接,柜门7内侧设置有密封层72,密封层72覆盖于控制柜本体1的正面内部,利用柜门7以及柜门7内侧设置的密封层72对控制柜本体1正面进行封堵,防止控制柜本体1使用过程中,灰尘从控制柜本体1正面进入到其中造成电子设备短路。
28.综上所述,借助于本实用新型的上述技术方案,在控制柜本体1使用时。首先通过柜门7将控制柜本体1正面进行关闭,然后在控制柜本体1启动后,气泵23同时启动,气泵23抽气,外部空气首先通过通气管一211进入到净化液箱21中净化,然后通过通气管二221导入除湿箱22内,再通过通气管三231由气泵23和出气管232抽向吹风腔4内,然后利用吹风腔4相对面的吹风孔41,将进风处理室2中抽入的气体直接通向控制柜本体1内的设备上,对设备进行直接降温,然后空气再从控制柜本体1背部的出风口5向外排出,其中出风口5背部设置的过滤板6,防止控制柜本体1外部的空气从出风口5进入到控制柜本体1内时,带有灰尘
进入,完成机器人自动焊接生产线的控制柜使用时的降温处理。
29.通过上述技术方案,1、通过气泵抽气,外部空气首先通过通气管一进入到净化液箱中净化,然后通过通气管二导入除湿箱内,再通过通气管三由气泵和出气管抽向吹风腔内,对降温空气进行除尘除湿处理,避免空气这种含有灰尘使焊接设备造成短路,和潮湿空气进入到控制柜内造成设备受潮,同时通过吹风腔上的吹风孔直接对控制柜内的设备直接吹风降温,使降温效果更好。
30.2、通过收纳槽对移动万向轮在控制柜本体平稳放置时,进行收纳,当需要移动控制柜本体时,拉出限位块,在弹簧作用下移动万向轮伸出收纳槽,然后再将限位块插入限位槽内,使移动万向轮固定在收纳槽外部,方便控制柜本体的移动。
31.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
32.以上公开的实用新型优选实施例只是用于帮助阐述实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用实用新型。实用新型仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1