一种磨损状态可实时评测预紧力可调控的惯性式压电作动器
1.本发明属于惯性压电作动器技术领域,具体涉及一种磨损状态可实时评测预紧力可调控的惯性式压电作动器。
背景技术:
2.惯性式压电作动器是一类采用非对称的驱动信号、非对称的机械夹持结构或非对称的摩擦力为控制方式,通过惯性冲击运动形成驱动的机构。
3.科学和工程领域的技术进步使研究人员着力于开发具有高精度和精密度的微型化设备和系统,满足小型化系统需求的技术发展为微纳米技术的发展铺平了道路,其应用扩展到生物医学航空航天、微电子、微光学等各种领域。与其他类型的压电驱动比较,惯性压电作动器具有结构简单、响应速度快、分辨率高、大行程、运动速度快和成本低等主要优点,可实现较大行程且同时具有纳米级定位精度。因此,惯性压电作动器适用于需要高分辨率、大行程的场合。目前,科技工作者已成功将惯性压电作动器应用于高精度定位机构,多自由度驱动器,微型机器人关节以及微操作手等领域。
4.粘滑式惯性压电作动器通过的动子定子摩擦副的周期性摩擦耦合实现驱动。工作过程中,摩擦副接触表面会不可避免的发生磨损,改变摩擦接触的物理力学特性,从而改变作动器的输出特性和导致作动器失效。传统直线式惯性压电作动器的摩擦副所拥有的时变性,影响了惯性式作动器的高平稳度和高精度。
技术实现要素:
5.为了克服上述现有技术存在的问题,本发明的目的在于提供一种磨损状态可实时评测预紧力可调控的惯性式压电作动器,能够实时获取磨损副磨损等接触状态,并根据磨损程度实时调节预紧力以调控输出特性,保持作动器的高性能输出。
6.为了达到上述目的,本发明采用如下技术方案:
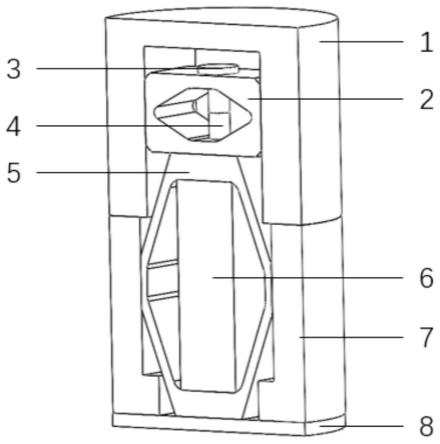
7.一种磨损状态可实时评测预紧力可调控的惯性式压电作动器,包括自上而下依次布置的上端外壳1、钳位机构2、调节螺钉3、预紧压电堆4、菱形环5、压电堆6、下端外壳7及底座8,这些部件的中心位于同一条竖直线上;上端外壳1内加工有轨道,轨道与钳位机构2紧密贴合,调节螺钉3的螺帽按压在钳位结构2上端面,调节螺钉3的螺杆穿过钳位机构2的短轴,调节螺钉3下端通过半球端帽与预紧压电堆4固接,预紧压电堆4内嵌入与钳位机构2一体加工的菱形环5的上端,菱形环5内过盈安装有压电堆6,菱形环5内嵌于下端外壳7轨道内,菱形环5下端面连接有底座8,同时底座8也与下端外壳7连接。
8.作动器预紧力可调,根据三角形位移传递原理,钳位机构2沿竖直方向的短轴压缩形变能够转化为沿水平方向的长轴膨胀形变,当调节螺钉旋入菱形环5上端面预设角度时,钳位机构2竖直方向受调节螺钉螺帽的按压而产生压缩形变,该短轴压缩形变继而转化为钳位机构2沿水平方向的长轴膨胀形变,从而改变钳位机构2的预紧力。
9.在增大摩擦的同时延长使用寿命:钳位机构2左右端面上进行硬质陶瓷材料表面
镀膜,通过包括化学蚀刻、溅射工艺和激光微纳加工方法,加工出上下凹凸具有梯度的齿形结构,陶瓷材料硬度较大,增大接触表面之间的摩擦力,凹陷处能暂存表面磨损产生的碎屑,同时在凹陷处可加入固体润滑剂,提高润滑效果,减少表面磨损。
10.通过类压电效应检测接触表面状态:预紧压电堆4通电产生固定频率的振动,通过钳位机构2的内菱形结构持续传递到侧面齿形结构上,由于齿形结构具有位移梯度,根据类压电效应,在受到应变梯度后,能产生持续的电荷,在钳位机构2与上端外壳1的接触表面之间连接电荷表,能实时观测电压信号;记录初始状态的电压读数,随着时间推移接触表面磨损增大,产生的电压信号逐渐降低,通过拧紧调节螺钉3,增大预紧力的方式以保证接触表面之间产生正常的摩擦力,使得电压信号恢复到正常水平;通过实验测得压电作动器完全失效时电压下降数值,作为失效值,则电荷表示数从初始值到失效值的相对摩擦次数,即为压电作动器的使用寿命。
11.压电堆6未通电时,钳位机构2与轨道之间的钳位力处于期望值,为使上端外壳1产生轴向向上的位移,第一步,对压电堆6从零电压缓慢加电至满行程电压,压电堆6沿轴向缓慢伸长,带动钳位机构2做缓慢远离底座8的运动,此时上端外壳1受到钳位机构2提供向上的静摩擦力能够克服向下的惯性力,上端外壳1与钳位机构2保持相对静止,产生向上位移,第二步,对压电堆6从满行程电压迅速降低至零电压,压电堆6沿轴向迅速收缩,带动钳位机构2迅速向底座8方向运动,钳位机构2回到初始位置,此时上端外壳1所受向下的滑动摩擦力,但由于上端外壳1惯性大,因此产生的向下位移小于钳位机构2向下的位移,第一步与第二步位移之差即为一个向上步距,重复第一、二步,上端外壳1产生持续向上的位移;类似的,为使上端外壳1产生轴向向下的位移,第一步,对压电堆6从零电压迅速加电至满行程电压,压电堆6沿轴向迅速伸长,带动钳位机构2做迅速远离底座8的运动,此时上端外壳1受向上的滑动摩擦力,但由于上端外壳1惯性大,因此产生的向上位移小于钳位机构2向上的位移,第二步,对压电堆6从满行程电压缓慢降低至零电压,压电堆6沿轴向缓慢收缩,带动钳位机构2缓慢向底座8运动,此时上端外壳1受到钳位机构2提供向上的静摩擦力能够克服向下的惯性力,上端外壳1与钳位机构2保持相对静止,产生向下位移,第一步与第二步位移之差即为一个向下步距,重复第一、二步,上端外壳1产生持续向下的位移。
12.和现有技术相比,本发明具有如下优点:
13.1)本发明通过额外添加预紧压电堆4,可实现预紧力的调控,控制预紧压电堆的电压信号即可调整摩擦的输出特性。
14.2)本发明通过金属表面镀膜的方式,增大了接触表面摩擦,同时设计的齿形结构可以减小磨损,增大压电作动器的使用寿命。
15.3)本发明基于类压电效应,使得接触面磨损状态可检测,并可通过调节预紧力从而减小因摩损造成的接触面失效影响,通过外接电荷表观察示数,可预测压电作动器的使用寿命。
16.4)本发明结构紧凑,体积小,质量轻,通过惯性驱动原理仅需单个压电叠堆便可驱动负载进行往返直线运动。
附图说明
17.图1为本发明部分剖面图。
18.图2a和图2b为本发明正视与左视剖视图。
19.图3为本发明爆炸图。
20.图4为本发明接触表面示意图。
21.图5为本发明向上运动的驱动电压时序图。
22.图6为本发明向下运动的驱动电压时序图。
具体实施方式
23.下面结合附图和具体实施方式对本发明作进一步详细说明。
24.如图1、图2a、图2b和图3所示,本发明一种磨损状态可实时评测预紧力可调控的惯性式压电作动器,包括自上而下依次布置的上端外壳1,钳位机构2,调节螺钉3,预紧压电堆4,菱形环5,压电堆6,下端外壳7及底座8,这些部件的中心位于同一条竖直线上;上端外壳1内加工有方槽轨道,方槽轨道与钳位机构2紧密贴合,调节螺钉3的螺帽按压在钳位结构2上端面,调节螺钉3的螺杆穿过钳位机构2的短轴,调节螺钉3下端通过半球端帽与预紧压电堆4固接,预紧压电堆4内嵌入与钳位机构2一体加工的菱形环5的上端,菱形环5内过盈安装有压电堆6,菱形环5内嵌于下端外壳7方槽轨道内,菱形环5下端面螺纹连接有底座8,同时底座8也与下端外壳7螺纹连接。
25.作动器预紧力可调,根据三角形位移传递原理,钳位机构2沿竖直方向的短轴压缩形变能够转化为沿水平方向的长轴膨胀形变,当调节螺钉旋入菱形环5上端面一定角度时,钳位机构2竖直方向受调节螺钉螺帽的按压而产生压缩形变,该短轴压缩形变继而转化为钳位机构2沿水平方向的长轴膨胀形变,从而改变钳位机构2的预紧力。
26.在增大摩擦的同时延长使用寿命:如图4所示,钳位机构2左右端面上进行硬质陶瓷材料表面镀膜,通过包括化学蚀刻、溅射工艺和激光微纳加工等方法,加工出上下凹凸具有梯度的齿形结构,陶瓷材料硬度较大,可增大接触表面之间的摩擦力,凹陷处可暂存表面磨损产生的碎屑,同时在凹陷处可加入固体润滑剂,提高润滑效果,减少表面磨损。
27.通过类压电效应检测接触表面状态:预紧压电堆4通电产生固定频率的微小振动,通过钳位机构2的内菱形结构持续传递到侧面齿形结构上,由于齿形结构具有位移梯度,根据类压电效应,在受到应变梯度后,可产生持续的微小电荷,在钳位机构2与上端外壳1的接触表面之间连接电荷表,可实时观测电压信号;记录初始状态的电压读数,随着时间推移接触表面磨损增大,产生的电压信号逐渐降低,可通过拧紧调节螺钉3,增大预紧力的方式以保证接触表面之间产生正常的摩擦力,使得电压信号恢复到正常水平;通过实验可测得压电作动器完全失效时电压下降数值,作为失效值,则电荷表示数从初始值到失效值的相对摩擦次数,即为压电作动器的使用寿命。
28.压电堆6未通电时,钳位机构2与方槽轨道之间的钳位力处于期望值,如图5所示,为使上端外壳1产生轴向向上的位移,第一步,对压电堆从零电压缓慢加电至满行程电压,压电堆6沿轴向缓慢伸长,带动钳位机构2做缓慢远离底座8的运动,此时上端外壳1受到钳位机构2提供向上的静摩擦力能够克服向下的惯性力,上端外壳1与钳位机构2保持相对静止,产生向上位移,第二步,对压电堆6从满行程电压迅速降低至零电压,压电堆6沿轴向迅速收缩,带动钳位机构2迅速向底座8方向运动,钳位机构2回到初始位置,此时上端外壳1所受向下的滑动摩擦力,但由于上端外壳1惯性较大,因此产生的向下位移小于钳位机构2向
下的位移,第一步与第二步位移之差即为一个向上步距,重复第一、二步,上端外壳1产生持续向上的位移;类似的,如图6所示,为使上端外壳1产生轴向向下的位移,第一步,对压电堆6从零电压迅速加电至满行程电压,压电堆6沿轴向迅速伸长,带动钳位机构2做迅速远离底座8的运动,此时上端外壳1受向上的滑动摩擦力,但由于上端外壳1惯性较大,因此产生的向上位移小于钳位机构2向上的位移,第二步,对压电堆6从满行程电压缓慢降低至零电压,压电堆6沿轴向缓慢收缩,带动钳位机构2缓慢向底座8运动,此时上端外壳1受到钳位机构2提供向上的静摩擦力能够克服向下的惯性力,上端外壳1与钳位机构2保持相对静止,产生向下位移,第一步与第二步位移之差即为一个向下步距,重复第一、二步,上端外壳1产生持续向下的位移。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1