一种双余度永磁同步电机控制系统的电流均衡控制方法
1.本发明属于电机技术领域,具体涉及一种同步电机控制系统的电流均衡控制方法。
背景技术:
2.双余度永磁同步电动机因其结构简单、效率高、可靠性高而被广泛应用于航空航天和军事领域。双冗余电机绕组通常同时工作。在这种情况下,电机的转矩脉动小于单绕组工作条件下的转矩脉动。更重要的是,当两组绕组中的电流值相同时,电机的扭矩大约是每个绕组中的2倍。双冗余工作可以同时降低电机的机械和电气常数,提高系统的动态性能。然而,考虑到特殊的电机结构,有许多因素,如两个三相绕组的不平衡电源电压、内阻和电感的差异,导致两组绕组中的电流不同。当双余度电机开启时,如果两组绕组电流不同,导致加热不均匀,可能会损坏长期运行的绝缘。因此,为了抑制电流不平衡的不良影响,实现高性能的驱动控制,有必要采用有效的策略来控制双余度永磁同步电机的电流平衡。
3.目前国内外学者采用不同的方法对双余度永磁同步电机控制系统进行研究,传统得电流均衡方法一般采用平均电流均衡法,该方法简单直接,但电流平衡过程较慢,动态响应较差。论文“the current balance realization of dual-redundancy pmsm based on the sliding mode error compensation”提出了一种最大电流均衡法,该方法提高了电流响应速度,具有较好的动态性能。但该方法由于给定电流不断变化,使得系统稳定性较差,当有扰动存在时,输出电流很容易产生较大波动,影响正常工作。
4.通过上述分析,现有技术存在的问题及缺陷为:传统的电流均衡控制方式速度环的输出被平分为两部分,分别作为两个余度的q轴电流环的给定,电流平衡过程缓慢,动态响应较差,无法满足对快速性要求较高的系统。
技术实现要素:
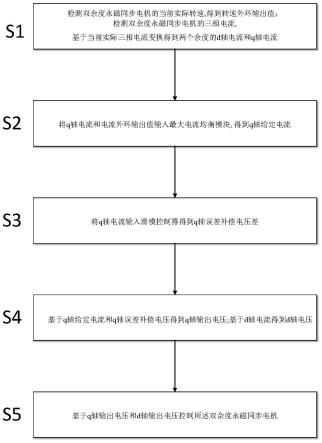
5.为了克服现有技术的不足,本发明提供了一种双余度永磁同步电机控制系统的电流均衡控制方法,方法包括:检测双余度永磁同步电机的当前实际转速,并基于当前实际转速和给定转速得到转速外环输出值;检测双余度永磁同步电机的三相电流,并基于当前实际三相电流变换得到两个余度的d轴电流和q轴电流;将q轴电流和电流外环输出值输入最大电流均衡模块,得到q轴给定电流;将q轴给定电流输入滑模控制器得到q轴误差补偿电压差;基于q轴电流和q轴误差补偿电压差得到q轴输出电压;基于d轴电流得到d轴输出电压;基于q轴输出电压和d轴输出电压控制双余度永磁同步电机,减少了电流均衡过程所需时间,增强了系统的稳定性。
6.本发明解决其技术问题所采用的技术方案包括如下步骤:
7.步骤1:双余度永磁同步电机采用转速环和电流环双闭环控制系统,外环为转速环,内环为电流环;
8.检测双余度永磁同步电机的当前实际转速,并基于当前实际转速和给定转速得到
转速外环输出值iq;
9.检测双余度永磁同步电机的三相电流,并基于当前三相电流变换得到两个余度的d轴电流i
d1
、i
d2
和q轴电流i
q1
、i
q2
;
10.步骤2:将q轴电流i
q1
、i
q2
和电流外环输出值输入最大电流均衡模块,得到q轴给定电流
11.所述最大电流均衡模块完成如下功能:
12.将q轴电流i
q1
、i
q2
比较获取较大值;
13.将较大值与转速外环输出值iq相加得到相加值;
14.将相加值分别减去q轴电流i
q1
、i
q2
得到q轴给定电流
15.步骤3:将q轴电流i
q1
、i
q2
输入滑模控制器得到q轴误差补偿电压差
△
uq;
16.步骤4:基于q轴给定电流q轴电流i
q1
、i
q2
和q轴误差补偿电压
△
uq得到q轴输出电压u
q1
、u
q2
;
17.基于d轴电流i
d1
、i
d2
得到d轴输出电压u
d1
、u
d2
;
18.步骤5:基于q轴输出电压u
q1
、u
q2
和d轴输出电压u
d1
、u
d2
控制双余度永磁同步电机;
19.优选地,所述双余度永磁同步电机的当前实际转速通过位移传感器或速度传感器检测。
20.优选地,所述位移传感器为旋转变压器,所述旋转变压器根据电机动子实时位移得到双余度永磁同步电机的当前实际转速。
21.优选地,所述检测双余度永磁同步电机的三相电流,并基于当前三相电流变换得到两个余度的d轴电流i
d1
、i
d2
和q轴电流i
q1
、i
q2
具体如下:
22.采用电流传感器检测双余度永磁同步电机当前的三相电流值;
23.三相电流值经过clark变换得到α轴当前电流和β轴当前电流;
24.获取双余度永磁同步电机的动子位置,并得到动子的电角度;
25.基于动子的电角度对α轴当前电流和β轴当前电流进行park变换得到两个余度的d轴电流i
d1
、i
d2
和q轴电流i
q1
、i
q2
。
26.优选地,所述电流传感器为霍尔检测元件。
27.优选地,所述步骤3将q轴电流i
q1
、i
q2
输入滑模控制器得到q轴误差补偿电压差
△
uq具体实现如下:
28.定义一余度电流环和二余度电流环中的q轴电流差值为γ,
29.γ=i
q1-i
q2
ꢀꢀ
(1)
30.将上式两边同时求导将q轴电流差值方程的变化律表示为:
[0031][0032]
选择双余度q轴电流差值作为滑模控制器的输入,滑模控制器输出设定为q轴电压补偿
△
uq;积分滑模面表示为:
[0033][0034]
其中,c表示定子电阻,τ表示时间常数;
[0035]
将上式两边同时对时间取导数,并结合式(1)、(2)、(3)得
[0036][0037]
其中,l
q1
、l
q2
分别表示双余度永磁同步电机中两个余度绕组的q轴电感,rs表示定子电阻,ωs表示转子机械角速度,ψ
d1
表示一余度d轴磁链大小,ψ
d2
表示二余度d轴磁链大小;
[0038]
上式进一步表示为:
[0039][0040]
其中,lq=l
q1
=l
q2
,两个余度绕组的q轴电感保持一致;
[0041]
确定滑模控制器趋近律为指数趋近律:
[0042][0043]
其中,ε表示大于零得可变常量,k表示大于零得可变常量,sgn(s)为符号函数,定义为:
[0044][0045]
系统稳定时,q轴误差补偿电压
△
uq表示为:
[0046][0047]
优选地,所述步骤5具体如下:
[0048]
获取双余度永磁同步电机的动子位置,并得到动子的电角度;
[0049]
基于电角度对d轴输出电压u
d1
、u
d2
和q轴输出电压u
q1
、u
q2
进行park逆变换得到α轴输出电压和β轴输出电压;
[0050]
α轴输出电压和β轴输出电压经过svpwm算法生成电机控制信号;
[0051]
双余度永磁同步电机输入侧的逆变器根据电机控制信号控制双余度永磁同步电机。
[0052]
优选地,所述逆变器为六相逆变器。
[0053]
优选地,所述逆变器为绝缘栅双极晶体管。
[0054]
本发明的有益效果如下:
[0055]
本发明方法减少了电流均衡过程所需时间,可以更快的达到较好的电流均衡效果,增强了系统的稳定性,降低了双余度电机在精密控制时的损耗。
附图说明
[0056]
图1是本发明方法流程图。
[0057]
图2是本发明实施例的最大电流均衡均衡模块示例。
[0058]
图3是本发明实施例的滑模控制器示例。
[0059]
图4是本发明实施例的双余度永磁同步电机控制系统的示意图。
具体实施方式
[0060]
下面结合附图和实施例对本发明进一步说明。
[0061]
如图1所示,一种双余度永磁同步电机控制系统的电流均衡控制方法,包括如下步骤:
[0062]
步骤1:双余度永磁同步电机采用转速环和电流环双闭环控制系统,外环为转速环,内环为电流环;
[0063]
检测双余度永磁同步电机的当前实际转速,并基于当前实际转速和给定转速得到转速外环输出值iq;
[0064]
检测双余度永磁同步电机的三相电流,并基于当前三相电流变换得到两个余度的d轴电流i
d1
、i
d2
和q轴电流i
q1
、i
q2
;
[0065]
步骤2:将q轴电流i
q1
、i
q2
和转速外环输出值iq输入最大电流均衡模块,得到q轴给定电流
[0066]
如图2所示,所述最大电流均衡模块完成如下功能:
[0067]
将q轴电流i
q1
、i
q2
比较获取较大值;
[0068]
将较大值与电流外环输出值相加得到相加值;
[0069]
将相加值分别减去q轴电流i
q1
、i
q2
得到q轴给定电流
[0070]
步骤3:将q轴电流i
q1
、i
q2
输入滑模控制器得到q轴误差补偿电压差
△
uq;
[0071]
步骤4:基于q轴给定电流q轴电流i
q1
、i
q2
和q轴误差补偿电压
△
uq得到q轴输出电压u
q1
、u
q2
;
[0072]
基于d轴电流i
d1
、i
d2
得到d轴输出电压u
d1
、u
d2
;
[0073]
步骤5:基于q轴输出电压u
q1
、u
q2
和d轴输出电压u
d1
、u
d2
控制双余度永磁同步电机;
[0074]
优选地,所述双余度永磁同步电机的当前实际转速通过位移传感器或速度传感器检测。
[0075]
优选地,所述位移传感器为旋转变压器,所述旋转变压器根据电机动子实时位移得到双余度永磁同步电机的当前实际转速。
[0076]
优选地,所述检测双余度永磁同步电机的三相电流,并基于当前三相电流变换得到两个余度的d轴电流i
d1
、i
d2
和q轴电流i
q1
、i
q2
具体如下:
[0077]
采用电流传感器检测双余度永磁同步电机当前的三相电流值;
[0078]
三相电流值经过clark变换得到α轴当前电流和β轴当前电流;
[0079]
获取双余度永磁同步电机的动子位置,并得到动子的电角度;
[0080]
基于动子的电角度对α轴当前电流和β轴当前电流进行park变换得到两个余度的d轴电流i
d1
、i
d2
和q轴电流i
q1
、i
q2
。
[0081]
优选地,所述电流传感器为霍尔检测元件。
[0082]
如图3所示,所述步骤3将q轴电流i
q1
、i
q2
输入滑模控制器得到q轴误差补偿电压差
△
uq具体实现如下:
[0083]
定义一余度电流环和二余度电流环中的q轴电流差值为γ,
[0084]
γ=i
q1-i
q2
[0085]
将上式两边同时求导将q轴电流差值方程的变化律表示为:
[0086][0087]
选择双余度q轴电流差值作为滑模控制器的输入,滑模控制器输出设定为q轴电压补偿
△
uq;积分滑模面表示为:
[0088][0089]
将上式两边同时对时间取导数,并结合式(1)、(2)、(3)得
[0090][0091]
其中,l
q1
、l
q2
分别表示双余度永磁同步电机中两个余度绕组的q轴电感;
[0092]
上式进一步表示为:
[0093][0094]
其中,lq=l
q1
=l
q2
,两个余度绕组的q轴电感保持一致;
[0095]
确定滑模控制器趋近律为指数趋近律:
[0096][0097]
其中,sgn(s)为符号函数,定义为:
[0098][0099]
系统稳定时,q轴误差补偿电压
△
uq表示为:
[0100][0101]
优选地,所述步骤5具体如下:
[0102]
获取双余度永磁同步电机的动子位置,并得到动子的电角度;
[0103]
基于电角度对d轴输出电压u
d1
、u
d2
和q轴输出电压u
q1
、u
q2
进行park逆变换得到α轴输出电压和β轴输出电压;
[0104]
α轴输出电压和β轴输出电压经过svpwm算法生成电机控制信号;
[0105]
双余度永磁同步电机输入侧的逆变器根据电机控制信号控制双余度永磁同步电机。
[0106]
参见图4,图4示出了根据本发明实施例的双余度永磁同步电机的控制系统的示意性原理图。逆变器与所述直流电源连接,将直流母线电压逆变为驱动交流电压;双余度永磁同步电机,与逆变器连接,基于驱动交流电压进行工作;双余度永磁同步电机的控制系统包括:速度外环和电流内环。
[0107]
其中,速度外环包括:通过传感器检测双余度永磁同步电机的动子实时位移和/或当前实际转速。速度外环是将双余度永磁同步电机的当前实际转速ω作为速度外环的速度反馈值,将当前实际转速n与给定转速n
*
输入比例积分控制器。
[0108]
同时,将电流内环中d轴输出电压u
d1
、u
d2
和q轴输出电压u
q1
、u
q2
进行park逆变换得
到α轴输出电压u
α
和β轴输出电压u
β
;
[0109]
所述α轴输出电压u
α
和所述β轴输出电压u
β
经过svpwm算法生成电机控制信号,以驱动双余度永磁同步电机;
[0110]
综上所述,根据本发明实施例的双余度永磁同步电机的控制方法及其系统,以双余度永磁同步电机为控制对象,所述方法减少了电流均衡过程所需时间,增强了系统的稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1