一种面激光焊接晶粒设备及其焊接工艺的制作方法
1.本技术涉及激光焊接领域,尤其是涉及一种面激光焊接晶粒设备及其焊接工艺。
背景技术:
2.目前,pcb板是电子工业的重要部件之一,几乎每种电子设备,小到电子手表、计算器,大到计算机、通信电子设备、军用武器系统,只要有集成电路等电子元件,为了使各个元件之间的电气互连,都要使用pcb板;但是,现有的pcb板往往需要焊接晶粒玻璃,在焊接过程中只能单次焊接一颗晶粒,焊接效率低下,同时,由于晶粒玻璃的尺寸较小,使得晶粒玻璃不容易取料和送料,进一步降低了产品的焊接速度。
3.相关技术中一种面激光焊接晶粒设备,包括有机座及设置于机座上的激光焊接机构、玻璃移送机构、基板移送机构、检测装置、取料装置、位移装置;其中所述激光焊接机构包括有面激光器及控制面激光器左右位移的第-驱动装置;所述位移装置左右活动式设置于机座上并位于激光焊接机构的左侧;所述检测装置设置于位移装置的上端并位于激光焊接机构的左侧;所述玻璃移送机构设置于位移装置的前端,所述玻璃移送机构经位移装置的控制在机座上左右位移,所述玻璃移送机构包括有玻璃平台、控制玻璃平台上下位移的第二驱动装置及控制玻璃平台旋转的第-旋转装置,所述玻璃平台用于放置装有晶粒玻璃的玻璃板;所述取料装置设置于检测装置的右侧,所述取料装置随位移装置的控制在机座上左右位移,所述取料装置位于激光焊接机构的左侧;所述基板移送机构设置于机座的前段位置并位于玻璃移送机构的下侧,所述基板移送机构包括有用于放置基板的传送平台、控制传送平台,上下位移的第一竖直驱动机构、控制传送平台左右位移的x轴驱动装置、控制传送平台前后位移的y轴驱动装置和控制传送平台旋转的第二旋转装置;所述玻璃移送机构、取料装置和基板移送机构随检测装置的反馈以将玻璃板与基板上下压合在一起,所述面激光器随第
‑‑
驱动装置的控制移至玻璃板、基板的上方以进行焊接操作。
4.针对上述中的相关技术,发明人认为存在以下缺陷:由于基板移送机构是设置于基座上,玻璃移送机构是设置于安装架上,在对pcb板焊接晶粒玻璃的过程中,需要将玻璃与基板对齐,而安装架是固定于底座上的,因此将晶粒玻璃焊接于pcb的过程中,只能通过调节玻璃平台的水平位置来实现将玻璃与基板对齐,无法通过调节安装架的位置实现将玻璃与基板对齐。
技术实现要素:
5.为了便于通过调节安装架的位置实现将玻璃与基板对齐,本技术提供一种面激光焊接晶粒设备及其焊接工艺。
6.本技术提供的一种面激光焊接晶粒设备及其焊接工艺采用如下的技术方案:一种面激光焊接晶粒设备,包括底座和安装架,所述安装架滑移设置于所述底座上,所述底座上设置有用于驱动所述安装架沿水平方向滑动的驱动装置;所述驱动装置包括直齿轮、齿条、旋转杆、安装板和驱动件;所述旋转杆穿过所述安装架,所述旋转杆与所述
安装架转动连接;所述直齿轮套设于所述旋转杆的一端,所述直齿轮与所述旋转杆固定连接;所述齿条固定于所述底座上,所述直齿轮与所述齿条相互啮合;所述安装板固定于所述安装架上,所述驱动件设置于所述安装板上,所述驱动件用于驱动所述旋转杆旋转。
7.通过采用上述技术方案,由于旋转杆转动设置于安装架上,齿条是固定于底座上,且直齿轮与齿条相互啮合;当工作人员需要调节安装架的位置时,通过驱动件驱动旋转杆旋转,旋转杆带动直齿轮旋转,直齿轮在旋转的过程中带动安装架沿齿条的长度方向滑动,安装架带动玻璃移送机构沿齿条的长度方向滑动,因此不仅可以通过调节玻璃平台的水平位置来实现将玻璃与基板对齐,同时也能通过调节安装架的位置实现将玻璃与基板对齐。
8.可选的,所述驱动件包括第一锥齿轮、第二锥齿轮、蜗轮、蜗杆、联动杆、支座和电机;所述支座固定于所述安装板上,所述联动杆的两端均与所述支座转动连接,所述蜗轮套设于所述联动杆上并与所述联动杆固定连接;所述蜗杆的两端均与所述支座转动连接,所述蜗轮与所述蜗杆相互啮合;所述电机固定于所述安装板上,所述电机的输出轴与所述蜗杆的端部固定连接;所述第一锥齿轮套设于所述联动杆上并与所述联动杆固定连接,所述第二锥齿轮套设于所述旋转杆上并与所述旋转杆固定连接,所述第一锥齿轮与所述第二锥齿轮相互啮合。
9.通过采用上述技术方案,电机驱动蜗杆旋转,蜗杆带动蜗轮旋转,蜗轮带动联动杆旋转,联动杆带动第一锥齿轮旋转,第一锥齿轮带动第二锥齿轮旋转,第二锥齿轮带动旋转杆旋转,从而带动安装架沿齿条的长度方向滑动,同时蜗轮蜗杆结构还具有自锁功能。
10.可选的,所述底座上固定设置有直线导轨,所述安装架上开设有导槽,所述直线导轨穿过所述导槽,所述安装架与所述直线导轨滑移配合。
11.通过采用上述技术方案,导槽对直线导轨有导向作用,从而对安装架有导向作用,增加了安装架沿水平方向滑动的稳定性。
12.可选的,所述底座上设置有两个限位块,所述安装架滑移设置于两个所述限位块之间。
13.通过采用上述技术方案,两个限位块对安装架有限位作用,限制了安装架的滑移行程。
14.可选的,所述限位块上固定设置有调节块,所述调节块上开设有调节槽,所述调节槽内穿设有螺栓,所述螺栓与所述底座螺纹配合。
15.通过采用上述技术方案,工作人员可以通过解除螺栓对调节块的固定作用,然后沿调节槽的长度方向调节限位块的位置,从而便于调节安装架的滑移行程。
16.可选的,所述底座上固定设置有固定块,所述固定块上开设有避位槽,所述齿条的端部穿过所述避位槽,所述齿条的两个侧壁分别抵接于所述避位槽的两个内侧壁。
17.通过采用上述技术方案,固定块对齿条的端部有固定作用,增加了齿条固定于底座上的牢固性。
18.可选的,所述避位槽的顶部固定设置有多个凸块,多个所述凸块均与所述齿条相互啮合。
19.通过采用上述技术方案,凸块对齿条有定位作用和固定作用,以使齿条不易沿自身的长度方向滑动。
20.可选的,所述固定块上固定设置有固定部,所述固定部上穿设有螺栓,所述螺栓与
所述底座螺纹配合。
21.通过采用上述技术方案,螺栓的螺帽和底座对固定部有夹持作用,从而将固定部固定于底座上,进而将固定块固定于底座上,增加了工作人员安装和拆卸固定块的便捷性。
22.可选的,所述支座上穿设有多个螺栓,多个所述螺栓均与所述安装板螺纹配合。
23.通过采用上述技术方案,增加了工作人员安装和拆卸支座的便捷性。
24.可选的,本技术还提供了一种面激光焊接晶粒设备的焊接工艺,包括以下步骤:步骤一:通过驱动件驱动旋转杆旋转,旋转杆带动直齿轮旋转,由于直齿轮与齿条相互啮合,从而带动安装架沿水平方向滑动,从而将安装架调节到合适的位置;步骤二:将装有晶粒玻璃的玻璃板放置于玻璃平台上,第二竖直驱动机构控制玻璃平台下移,第二旋转机构控制玻璃平台旋转并移至取料装置的下方;步骤三:第二竖直驱动机构控制玻璃平台上移,取料装置的吸盘吸取玻璃板,玻璃平台经第二竖直驱动机构的控制远离玻璃板;步骤四:将基板放置于传送平台上,传送平台随第一水平驱动机构、第二水平驱动机构、第一竖直驱动机构和第一旋转机构的控制移至玻璃板的下方;步骤五:检测装置确认玻璃板、基板的位置,玻璃板、基板分别移至玻璃载框的定位槽的上、下方,并上下位移压合在一起,吸盘远离玻璃板;步骤六:面激光器自第四水平驱动机构移至玻璃板的上方并启动面激光器将玻璃板的晶粒玻璃焊接到基板上。
25.通过采用上述技术方案,当工作人员需要调节安装架的位置时,通过驱动件驱动旋转杆旋转,旋转杆带动直齿轮旋转,直齿轮在旋转的过程中带动安装架沿齿条的长度方向滑动,安装架带动玻璃移送机构沿齿条的长度方向滑动,因此不仅可以通过调节玻璃平台的水平位置来实现将玻璃与基板对齐,同时也能通过调节安装架的位置实现将玻璃与基板对齐;利用面激光器实现晶粒玻璃的区域性焊接,提高了产品整体的焊接速度。
26.综上所述,本技术包括以下至少一种有益技术效果:1.由于旋转杆转动设置于安装架上,齿条是固定于底座上,且直齿轮与齿条相互啮合;当工作人员需要调节安装架的位置时,通过驱动件驱动旋转杆旋转,旋转杆带动直齿轮旋转,直齿轮在旋转的过程中带动安装架沿齿条的长度方向滑动,安装架带动玻璃移送机构沿齿条的长度方向滑动,因此不仅可以通过调节玻璃平台的水平位置来实现将玻璃与基板对齐,同时也能通过调节安装架的位置实现将玻璃与基板对齐;2.电机驱动蜗杆旋转,蜗杆带动蜗轮旋转,蜗轮带动联动杆旋转,联动杆带动第一锥齿轮旋转,第一锥齿轮带动第二锥齿轮旋转,第二锥齿轮带动旋转杆旋转,从而带动安装架沿齿条的长度方向滑动,同时蜗轮蜗杆结构还具有自锁功能;3.导槽对直线导轨有导向作用,从而对安装架有导向作用,增加了安装架沿水平方向滑动的稳定性。
附图说明
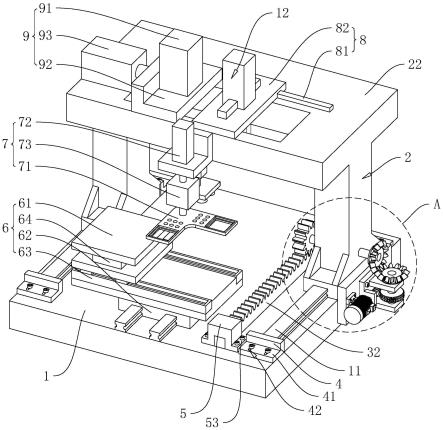
27.图1是本技术实施例中面激光焊接晶粒设备的结构示意图。
28.图2是图1中a部分的局部放大图。
29.图3是本技术实施例中固定块的结构示意图。
30.图4是本技术实施例中面激光焊接晶粒设备另一视角的剖视图。
31.图5是本技术实施例中玻璃载框另一视角的剖视图。
32.附图标记说明:1、底座;11、直线导轨;2、安装架;21、导槽;22、安装平台;23、玻璃载框;24、定位槽;25、遮光部;26、限位台阶;3、驱动装置;31、直齿轮;32、齿条;33、旋转杆;34、安装板;35、驱动件;351、第一锥齿轮;352、第二锥齿轮;353、蜗轮;354、蜗杆;355、联动杆;356、支座;357、电机;4、限位块;41、调节块;42、调节槽;5、固定块;51、避位槽;52、凸块;53、固定部;6、基板传送装置;61、传送平台;62、第一水平驱动机构;63、第二水平驱动机构;64、第一竖直驱动机构;65、第一旋转机构;7、玻璃传送装置;71、玻璃平台;72、第二竖直驱动机构;73、第二旋转机构;8、位移装置;81、滑动块;82、第三水平驱动机构;9、面激光焊接装置;91、面激光器;92、活动板;93、第四水平驱动机构;10、取料装置;101、第三竖直驱动机构;102、吸盘;12、检测装置。
具体实施方式
33.以下结合附图1-5对本技术作进一步详细说明。
34.在本实施例中的水平方向上,将安装架2的移动方向定义为第一方向,将与第一方向相互垂直的方向定义为第二方向,以此为基础对面激光焊接晶粒设备进行说明。
35.本技术实施例公开一种面激光焊接晶粒设备。参照图1和图2,面激光焊接晶粒设备包括底座1和安装架2,安装架2与底座1滑移配合,底座1上设置有用于驱动安装架2沿第一方向移动的驱动装置3。底座1上设置有用于传送基板的基板传送装置6;安装架2上依次设置有用于传送装有晶粒玻璃板的玻璃传送装置7、用于驱动玻璃传送装置7沿第二方向滑动的位移装置8、用于检测玻璃板与基板是否对齐的检测装置12、用于将多个晶粒焊接于基板上的面激光焊接装置9。值得注意的是,玻璃传送装置7位于基板传送装置6的上方。
36.继续参照图1和图2,驱动装置3包括直齿轮31、齿条32、旋转杆33、安装板34和驱动件35。旋转杆33沿第二方向延伸,旋转杆33穿过安装架2,旋转杆33与安装架2转动连接。直齿轮31套设于旋转杆33靠近底座1的一端,直齿轮31与旋转杆33固定连接。齿条32固定于底座1的上表面,齿条32沿第一方向延伸,直齿轮31与齿条32相互啮合。安装板34固定于安装架2的侧壁,且安装板34的侧壁抵接于安装架2的侧壁。驱动件35设置于安装板34上,驱动件35用于驱动旋转杆33旋转。当工作人员需要调节安装架2的位置时,通过驱动件35驱动旋转杆33旋转,旋转杆33带动直齿轮31旋转,直齿轮31在旋转的过程中带动安装架2沿齿条32的长度方向滑动,安装架2带动玻璃传送装置7沿齿条32的长度方向滑动,因此便于通过调节安装架2的位置实现将玻璃与基板对齐。
37.参照图2,驱动件35包括第一锥齿轮351、第二锥齿轮352、蜗轮353、蜗杆354、联动杆355、支座356和电机357。支座356通过多个螺栓固定于安装板34的侧壁,联动杆355沿竖直方向延伸,联动杆355的两端均与支座356转动连接,蜗轮353套设于联动杆355上并与联动杆355固定连接。蜗杆354沿第一方向延伸,蜗杆354的两端均与支座356转动连接,蜗轮353与蜗杆354相互啮合。电机357固定于安装板34的侧壁,电机357的输出轴与蜗杆354的端部固定连接。第一锥齿轮351套设于联动杆355的顶端并与联动杆355固定连接,第二锥齿轮352套设于旋转杆33远离直齿轮31的一端并与旋转杆33固定连接,第一锥齿轮351与第二锥
齿轮352相互啮合。通过电机357驱动蜗杆354旋转,蜗杆354带动蜗轮353旋转,蜗轮353带动联动杆355旋转,联动杆355带动第一锥齿轮351旋转,第一锥齿轮351带动第二锥齿轮352旋转,第二锥齿轮352带动旋转杆33旋转,从而带动安装架2沿齿条32的长度方向滑动,蜗轮353蜗杆354结构还具有自锁功能。
38.继续参照图1和图2,底座1的上表面固定设置有两个直线导轨11,安装架2的下表面开设有两个导槽21,两个直线导轨11和两个导槽21均沿第一方向延伸,每个导槽21的两端均呈开口设置,两个直线导轨11分别与两个导槽21滑移配合。两个导槽21分别对两个直线导轨11有导向作用,从而对安装架2有导向作用,增加了安装架2沿第一方向滑动的稳定性。
39.参照图1,底座1上设置有两个限位块4, 齿条32的两端分别抵接于两个限位块4的内侧壁,安装架2滑移设置于两个限位块4之间。两个限位块4对安装架2有限位作用,限制了安装架2的滑移行程。具体的,两个限位块4相互背离的侧壁均一体成型有调节块41,调节块41上开设有贯穿的调节槽42,调节槽42沿第一方向延伸。调节槽42内穿设有螺栓,螺栓与底座1螺纹配合。工作人员可以通过解除螺栓对调节块41的固定作用,然后沿调节槽42的长度方向调节限位块4的位置,从而便于调节安装架2的滑移行程。
40.参照图1和图3,底座1上固定设置有固定块5,固定块5上开设有避位槽51,齿条32的端部穿过避位槽51,齿条32的两个侧壁分别抵接于避位槽51的两个内侧壁。避位槽51的顶部固定设置有多个凸块52,多个凸块52均与齿条32相互啮合。固定块5对齿条32的端部有固定作用,增加了齿条32固定于底座1上的牢固性。凸块52对齿条32有定位作用和固定作用,以使齿条32不易沿自身的长度方向滑动。
41.继续参照图1和图3,固定块5两个相对的侧壁均一体成型有固定部53,两个固定部53上均穿设有螺栓,螺栓与底座1螺纹配合。螺栓的螺帽和底座1对固定部53有夹持作用,从而将两个固定部53固定于底座1上,进而将固定块5固定于底座1上,增加了工作人员安装和拆卸固定块5的便捷性。
42.参照图1和图4,基板传送装置6包括传送平台61、第一水平驱动机构62、第二水平驱动机构63、第一竖直驱动机构64和第一旋转机构65。传送平台61用于放置基板,第一水平驱动机构62用于驱动传送平台61沿第一方向滑动,第二水平驱动机构63用于驱动传送平台61沿第二方向滑动,第一竖直驱动机构64用于驱动传送平台61升降,第一旋转机构65用于驱动传送平台61旋转。
43.参照图1,玻璃传送装置7包括玻璃平台71、第二竖直驱动机构72和第二旋转机构73。玻璃平台71用于放置装有晶粒玻璃的玻璃板,第二竖直驱动机构72用于驱动玻璃板升降,第二旋转机构73用于驱动玻璃平台71旋转。
44.继续参照图1,位移装置8包括滑动块81和第三水平驱动机构82,滑动块81滑移设置于安装架2上,第三水平驱动机构82设置于安装架2上,第三水平驱动机构82用于驱动滑动块81沿第二方向滑动。
45.继续参照图1,面激光焊接装置9包括面激光器91、活动板92和第四水平驱动机构93,活动板92滑移设置于安装架2上,第四水平驱动机构93设置于安装架2上,第四水平驱动机构93用于驱动活动板92沿第二方向滑动。面激光器91设置于活动板92上,面激光器91用于将多个晶粒玻璃焊接于基板上。
46.参照图4,取料装置10包括第三竖直驱动机构101和多个吸盘102,第三竖直驱动机构101设置于检测装置12的一侧,第三竖直驱动机构101用于驱动多个吸盘102升降。
47.参照图1和图4,安装架2包括安装平台22,面激光焊接装置9、玻璃传送装置7、检测装置12、取料装置10和位移装置8均设置于安装平台22上,安装平台22上还设置有避位口,面激光器91朝向避位口的位置。玻璃传送装置7、取料装置10和基板传送装置6随检测装置12的反馈将玻璃板和基板上下压合在一起。第四水平驱动机构93驱动面激光器91滑移至玻璃板和基板的上方,面激光器91依次将多个晶粒玻璃焊接于基板上。
48.参照图4和图5,安装平台22的下表面固定设置有玻璃载框23,玻璃载框通过固定件231固定于安装平台22的下表面。玻璃载框23上开设有用于定位基板和玻璃板的定位槽24。定位槽24处设置有遮光部25,遮光部25环绕定位槽24延伸设置,基板位于遮光部25的下端。定位槽24的下端还设置有限位台阶26,基板的边沿位于限位台阶26的下方,且限位台阶26的下表面与遮光部25的下表面齐平。
49.本技术实施例一种面激光焊接晶粒设备的焊接工艺,包括以下步骤:步骤一:通过驱动件35驱动旋转杆33旋转,旋转杆33带动直齿轮31旋转,由于直齿轮31与齿条32相互啮合,从而带动安装架2沿水平方向滑动,从而将安装架2调节到合适的位置;步骤二:将装有晶粒玻璃的玻璃板放置于玻璃平台71上,第二竖直驱动机构72控制玻璃平台71下移,第二旋转机构73控制玻璃平台71旋转并移至取料装置10的下方;步骤三:第二竖直驱动机构72控制玻璃平台71上移,取料装置10的吸盘102吸取玻璃板,玻璃平台71经第二竖直驱动机构72的控制远离玻璃板;步骤四:将基板放置于传送平台61上,传送平台61随第一水平驱动机构62、第二水平驱动机构63、第一竖直驱动机构64和第一旋转机构65的控制移至玻璃板的下方;步骤五:检测装置12确认玻璃板、基板的位置,玻璃板、基板分别移至玻璃载框23的定位槽24的上、下方,并上下位移压合在一起,吸盘102远离玻璃板;步骤六:面激光器91自第四水平驱动机构93移至玻璃板的上方并启动面激光器91将玻璃板的晶粒玻璃焊接到基板上。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1