一种基于运动状态空间位置点的安全通信方法
1.本发明属于通信技术领域,具体涉及一种基于运动状态空间位置点的安全通信方法。
背景技术:
2.在通信中,系统容易遭受窃听、仿冒、篡改等攻击。现有的抗截获和反欺骗手段依赖于上层的加密和认证技术,随着计算能力的提升,上层加密和认证技术面临密钥管理、分配和维护困难,长密钥的高运算开销和资源浪费等挑战。为了应对这些问题,国内外提出物理层安全通信,利用物理层本身的随机性来摆脱长密钥的依耐性。目前研究较为广泛的物理层安全通信技术如空域波束赋形技术和方向调制技术,只能解决角度域的安全问题。
3.申请号为202110470951 .5、发明名称为“一种基于空间位置点的安全通信系统”的中国发明专利公开了一种基于距离域的安全通信系统,实现了保障距离域上的安全性,但该安全通信系统仍存在一定的局限性,即发射机与接收机始终在固定的位置点上进行正确收发,对于安全通信的其他应用背景,即当收发机处于运动状态下,该系统提供的安全通信方式便不再适用。
技术实现要素:
4.本发明的目的是克服上述现有技术的缺陷,提供一种基于运动状态空间位置点的安全通信方法。
5.本发明所提出的技术问题是这样解决的:一种基于运动状态空间位置点的安全通信方法,包括以下步骤:配置步骤:发射机和接收机都配置发射端和接收端;发射端配置具体包括发端时间计数模块、星座映射模块、发端相位旋转模块和发端相位预补偿模块;接收端配置具体包括收端时间计数模块、收端相位旋转模块、收端相位补偿模块和星座逆映射模块;训练步骤:设定发射机和接收机的发射端和接收端的当前模式为训练模式,发射机的发端时间计数模块产生周期性脉冲,更新正向计数器的计数值和发端寄存器的值;接收机的收端时间计数模块产生周期性脉冲,更新反向计数器的计数值和收端寄存器的值;训练协议根据正向计数器的计数值、发端寄存器的值、反向计数器的计数值和收端寄存器的值计算输出信号相位;接收机的收端相位补偿模块根据输出信号相位计算收端相位补偿值;发射机的相位预补偿模块计算相位预补偿值;通信步骤:设定发射机的发射端和接收机的接收端的当前模式为训练模式,发射机的接收端和接收机的发射端的当前模式为工作模式;或者设定发射机的发射端和接收机的接收端的当前模式为工作模式,发射机的接收端和接收机的发射端的当前模式为训练模式;或者设
定发射机和接收机的发射端和接收端的当前模式为工作模式;接收机的收端相位补偿模块计算收端相位补偿值;发射机的相位预补偿模块计算相位预补偿值;发射机的发射端向接收机的接收端发送数据,星座映射模块计算扰动后的信号码片;发端相位旋转模块将扰动后的信号码片进行相位旋转,得到旋转后发射信号码片;发端相位预补偿模块依据相位预补偿值对旋转后发射信号码片进行相位预补偿,得到相位预补偿后的发射信号码片并依次发送至接收机的接收端;接收机的收端相位旋转模块对接收信号依次进行匹配滤波、均衡操作和相位旋转,得到旋转后接收信号码片;收端相位补偿模块依据收端相位补偿值对旋转后接收信号码片进行相位补偿,得到相位补偿后接收信号码片;星座逆映射模块将相位补偿后接收信号码片相加得到接收信号,对接收信号进行逆映射得到接收比特流。
6.进一步的,训练协议计算输出信号相位的具体过程为:训练协议产生导频信号;发端相位旋转模块产生第一查找表,读取发端训练相位旋转信号值并对导频信号进行相位旋转,发端相位预补偿模块对相位旋转后的导频信号进行相位预补偿后发送至接收机的接收端;接收机的收端相位旋转模块产生第二查找表,读取收端训练相位旋转信号值并对接收信号依次进行匹配滤波、均衡操作和相位旋转,得到旋转后接收导频;训练协议求取旋转后接收导频和导频信号的互相关函数,取互相关函数的相位作为输出信号相位。
7.进一步的,在训练步骤中,接收机的收端相位补偿模块计算收端相位补偿值的具体过程为:读取接收机的发射端和接收端的当前模式,并寄存到第二状态寄存器中;第二标志位寄存器根据第二状态寄存器的值确定自身的值;根据第二状态寄存器和第二标志位寄存器的值,确定初始位置点相位寄存值和当前位置点相位值为输出信号相位,令收端相位补偿值为0;依据初始位置点相位寄存值和当前位置点相位值计算相位变化值。
8.在工作步骤中,接收机的收端相位补偿模块计算收端相位补偿值的具体过程为:读取接收机的发射端和接收端的当前模式,并寄存到第二状态寄存器中;第二标志位寄存器根据第二状态寄存器的值确定自身的值;根据第二状态寄存器和第二标志位寄存器的值,更新初始位置点相位寄存值、当前位置点相位值和收端相位补偿值;依据初始位置点相位寄存值和当前位置点相位值计算相位变化值。
9.进一步的,发射机的相位预补偿模块计算相位预补偿值的具体过程为:读取发射机的发射端和接收端的当前模式,并寄存到第一状态寄存器中;第一标志位寄存器依据第一状态寄存器的值确定自身的值;根据第一状态寄存器、第一标志位寄存器的值和相位变化值,确定相位预补偿值。
10.进一步的,发端相位预补偿模块依据相位预补偿值对旋转后发射信号码片进行相位预补偿的具体过程为:将旋转后发射信号码片与相位预补偿值的复指数幂相乘作为相位预补偿后的发射信号码片。
11.进一步的,收端相位补偿模块依据收端相位补偿值对旋转后接收信号码片进行相位补偿的具体过程为:将旋转后接收信号码片与收端相位补偿值的复指数幂相乘作为相位补偿后接收信号码片。
12.进一步的,发射机和接收机是一组相对的概念,当接收机用于发射、发射机用于接收时,接收机的发射端作为发射机的发射端,发射机的接收端作为接收机的接收端。
13.本发明的有益效果是:
本发明所述安全通信方法可以实现基于空间位置点在运动状态下的安全通信,即对于运动状态下的目标接收机所处于的任何空间位置点,目标接收机都能接收到正确的qpsk星座图,而对于窃听接收机一旦和目标接收机相对位置发生改变,就不能接收到正确的qpsk星座图,从而达到运动状态下空间位置点安全通信的目的。
附图说明
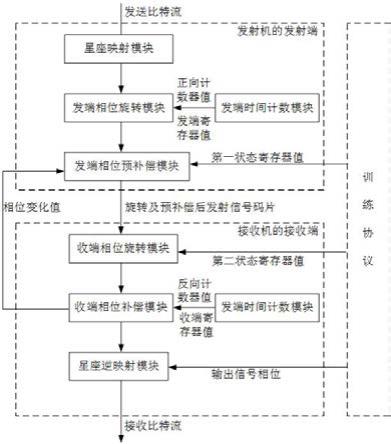
14.图1为本发明所述安全通信方法的数据交互流程示意图。
具体实施方式
15.下面结合附图和实施例对本发明进行进一步的说明。
16.本实施例提供一种基于运动状态空间位置点的安全通信方法,其数据交互流程示意图如图1所示,基于安全通信系统,安全通信系统包括发射机、接收机和训练协议;发射机和接收机都包括发射端和接收端;发射端包括发端时间计数模块、星座映射模块、发端相位旋转模块和发端相位预补偿模块;接收端包括收端时间计数模块、收端相位旋转模块、收端相位补偿模块和星座逆映射模块;安全通信系统的运行依次为训练步骤和通信步骤。
17.本实施例所述方法包括以下步骤:配置步骤:发射机和接收机都配置发射端和接收端;发射端配置具体包括发端时间计数模块、星座映射模块、发端相位旋转模块和发端相位预补偿模块;接收端配置具体包括收端时间计数模块、收端相位旋转模块、收端相位补偿模块和星座逆映射模块;发射机和接收机是一组相对的概念,当接收机用于发射、发射机用于接收时,接收机的发射端作为发射机的发射端,发射机的接收端作为接收机的接收端;发射机和接收机的发射端和接收端的分别输入当前模式,其中可能的模式输入为训练模式(t)和工作模式(w);发射机的发射端和接收机的接收端的当前模式相同,发射机的接收端和接收机的发射端的当前模式相同;训练步骤的具体过程如下:s1. 设定发射机和接收机的发射端和接收端的当前模式为训练模式,令发端相位预补偿模块中m个相位预补偿值的初始值为0,第m个相位预补偿值为,1≤m≤m,m为正整数;s2. 发射机的发射端上电时,发端时间计数模块产生周期性脉冲,更新正向计数器的计数值和发端寄存器的值;s2的具体过程为:s2.1:产生周期性脉冲,脉冲周期为t,即相邻脉冲之间的时间间隔为t个系统时钟周期;s2.2:启动m个正向计数器从0开始计数,用表示第m个正向计数器的当前计数值,下一个系统时钟上升沿到来时,第m个正向计数器的计数值更新为:
其中,t为时间,mod表示取余,n为正向计数器最大值;s2.3:启动m个初始值为0的发端寄存器,用表示第m个发端寄存器的当前值,在下一个周期性脉冲到来时,第m个发端寄存器的值更新为:s3. 接收机的接收端上电时,收端时间计数模块产生周期性脉冲,更新反向计数器的计数值和收端寄存器的值;s3的具体过程为:s3.1:产生周期性脉冲,脉冲周期为t;s3.2:启动m个反向计数器从0开始计数,用表示第m个反向计数器的当前计数值,下一个系统时钟上升沿到来时,第m个反向计数器的计数值更新为:s3.3:启动m个初始值为0的收端寄存器,用表示第m个收端寄存器的当前值,在下一个周期性脉冲到来时,第m个收端寄存器的值更新为:s4. 发射机的发射端和接收机的接收端都上电以后,训练协议计算输出信号相位,;s4的具体过程如下:s4.1:在发射机的发射端产生m路导频信号;s4.2:发端相位旋转模块产生长度为n的第一查找表,第一查找表在第i个地址上存储的值为,,k为正整数,j为虚数单位;s4.3:在发端时间计数模块产生的周期性脉冲到来时,以m个发端寄存器的当前值为地址;在其他时刻,以m个正向计数器的当前计数值为地址;在第一查找表中读取m个地址存储的值作为m个发端训练相位旋转信号值;s4.4:发端相位旋转模块依据m个发端训练相位旋转信号值,对m路导频信号进行相位旋转,得到m路旋转后导频信号:
其中,表示第m路旋转后导频信号;s4.5:发端相位预补偿模块对m路旋转后导频信号进行相位预补偿,得到m路相位预补偿后导频信号:其中,表示第m路相位预补偿后导频信号;s4.6:将m路相位预补偿后导频信号依次发送至接收机的接收端;s4.7:收端相位旋转模块产生长度为n的第二查找表,其中第二查找表在第i个地址上存储的值为;s4.8:在收端时间计数模块产生的周期性脉冲到来时,以m个收端寄存器的当前值为地址;在其他时刻,以m个反向计数器的当前计数值为地址;在第二查找表中读取m个地址存储的值作为m个收端训练相位旋转信号值;s4.9:对接收的m路相位预补偿后导频信号进行匹配滤波和均衡操作,得到m路接收导频;s4.10:依据m个收端训练相位旋转信号值,对m路接收导频进行相位旋转,得到m路旋转后接收导频:s4.11:求取m路旋转后接收导频和m路导频信号的互相关函数:其中,上标*表示取共轭;求取互相关函数的相位,求取m个输出信号相位;s5. 接收机的接收端中,收端相位补偿模块执行以下步骤确定m个相位变化值;s5.1 读取接收机的发射端和接收端的当前模式,并寄存到第二状态寄存器中;第二状态寄存器共有tt、tw、wt和ww四种状态,tt表示接收机的接收端和发射端都处于训练模式,tw表示接收机的接收端和发射端分别处于训练模式和工作模式,wt表示接收机的接收端和发射端分别处于工作模式和训练模式,ww表示接收机的接收端和发射端都处于工作模
式;第二状态寄存器的初始状态设定为tt;s5.2 第二标志位寄存器根据第二状态寄存器的值确定自身的值,具体方式为:初始化第二标志位寄存器的值flag2=0;若第二状态寄存器的值为tt,第二标志位寄存器的值flag2=flag2;若第二状态寄存器的值为tw,第二标志位寄存器的值flag2=1;若第二状态寄存器的值为wt,第二标志位寄存器的值flag2=0;若第二状态寄存器的值为ww,第二标志位寄存器的值flag2=flag2;s5.3 根据第二状态寄存器和第二标志位寄存器的值,确定m个初始位置点相位寄存值、m个当前位置点相位值以及m个收端相位补偿值,具体方式如下:若第二状态寄存器的值为tt,,,;若第二状态寄存器的值为tw,,,;若第二状态寄存器的值为wt, ,,;若第二状态寄存器的值为ww且flag2=0,,,;若第二状态寄存器的值为ww且flag2=1,,,;s5.4 依据m个初始位置点相位寄存值和m个当前位置点相位值,计算m个相位变化值:其中,表示第m个相位变化值;s6. 发射机的发射端中,相位预补偿模块执行以下步骤确定m个相位预补偿值;s6.1 读取发射机的发射端和接收端的当前模式,并寄存到第一状态寄存器中;第
一状态寄存器共有tt、tw、wt和ww四种状态,tt表示发射机的发射端和接收端都处于训练模式,tw表示发射机发射端和接收端分别处于训练模式和工作模式,wt表示发射机发射端和接收端分别处于工作模式和训练模式,ww表示发射机发射端和接收端都处于工作模式;第一状态寄存器的初始状态设定为tt;s6.2 第一标志位寄存器依据第一状态寄存器的值确定自身的值,具体方式如下:初始化第一标志位寄存器的值flag1=0;若第一状态寄存器的值为tt,第一标志位寄存器的值flag1=flag1;若第一状态寄存器的值为tw,第一标志位寄存器的值flag1=1;若第一状态寄存器的值为wt,第一标志位寄存器的值flag1=0;若第一状态寄存器的值为ww,第一标志位寄存器的值flag1=flag1;s6.3 根据第一状态寄存器和第一标志位寄存器的值,确定发端相位预补偿模块中m个相位预补偿值,具体方式如下:若第一状态寄存器的值为tt,;若第一状态寄存器的值为tw,;若第一状态寄存器的值为wt,;若第一状态寄存器的值为ww且flag1=0,;若第一状态寄存器的值为ww且flag1=1,。
18.通信步骤的具体过程如下:设定发射机的发射端和接收机的接收端的当前模式为训练模式,发射机的接收端和接收机的发射端的当前模式为工作模式;或者设定发射机的发射端和接收机的接收端的当前模式为工作模式,发射机的接收端和接收机的发射端的当前模式为训练模式;或者设定发射机和接收机的发射端和接收端的当前模式为工作模式;执行训练步骤的s5
‑
s6;s7. 发射机的发射端向接收机的接收端发送数据,星座映射模块在发送比特流到达后,计算m个扰动后的信号码片;s7的具体过程为:s7.1:依据预先定义的l阶星座图,将发送比特流映射为同相/正交信号s(t),以s(t)为原始信号,产生m个信号码片,每个信号码片的信号值为s(t)/m;s7.2:计算m路时变噪声的和:
其中,为第m路时变噪声;时变噪声产生方法为:对2m组长度为11的移位寄存器赋予不同的初值,在每个系统时钟上升沿到达时进行移位操作,并将每组移位寄存器最后5位的值转化为十进制数,得到2m个时变随机整数,计算第m路时变噪声,表示第2m
‑
1个时变随机整数,表示第2m
‑
1个时变随机整数;s7.3:利用m路时变噪声对m个信号码片进行扰动,具体扰动方式为:其中,表示扰动后的第m个信号码片;s8. 发端相位旋转模块在星座映射模块产生m个扰动后的信号码片后,计算m个旋转后发射信号码片,并依次发送到发端相位预补偿模块;s8的具体过程为:s8.1:在发端时间计数模块产生的周期性脉冲到来时,以m个发端寄存器的当前值为地址;在其他时刻,以m个正向计数器的当前计数值为地址;在第一查找表中读取m个地址存储的值作为m个发端相位旋转信号值;s8.2:依据m个发端相位旋转信号值,对m个扰动后的信号码片进行相位旋转,得到m个旋转后发射信号码片:其中,表示第m个旋转后发射信号码片;s8.3:将m个旋转后发射信号码片依次发送至发端相位预补偿模块;s9. 发端相位预补偿模块接收到m个旋转后发射信号码片后,执行以下步骤:s9.1依据m个相位预补偿值,对m个旋转后发射信号码片进行相位预补偿,得到m个相位预补偿后的发射信号码片:
其中,表示第m个相位预补偿后发射信号码片;s9.2 将m个相位预补偿后发射信号码片依次发送至接收机的接收端。
19.s10. 接收机的接收端中,收端相位旋转模块接收到m个相位预补偿后发射信号码片后,计算m个旋转后接收信号码片;s10的具体过程为:s10.1:在收端时间计数模块产生的周期性脉冲到来时,以m个收端寄存器的当前值为地址;在其他时刻,以m个反向计数器的当前计数值为地址;在第二查找表中读取m个地址存储的值作为m个收端相位旋转信号值;s10.2:对接收的m个相位预补偿后发射信号码片进行匹配滤波和均衡操作,得到m个接收信号码片;s10.3:依据m个收端相位旋转信号值,对m个接收信号码片进行相位旋转,得到m个旋转后接收信号码片:其中,表示第m个旋转后接收信号码片;s11 收端相位补偿模块在m个旋转后接收信号码片到达后,执行以下步骤:s11.1依据m个收端相位补偿值,对m个旋转后接收信号码片进行相位补偿,得到m个相位补偿后的接收信号码片:其中,r
(m),comprx
(t)表示第m个相位补偿后接收信号码片;s11.2 将m个相位补偿后接收信号码片依次发送至星座逆映射模块。
20.s12. 星座逆映射模块在m个相位补偿后接收信号码片到达后,将m个相位补偿后接收信号码片相加得到接收信号,依据l阶星座图,对接收信号进行逆映射得到接收比特流。
21.s12的具体过程为:s12.1:将m个相位补偿后接收信号码片相加,得到接收信号:
s12.2:依据l阶星座图,对接收信号进行逆映射得到接收比特流。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1