一种监控区域目标跟踪系统
1.本发明涉及图像处理技术领域,尤其涉及一种监控区域目标跟踪系统。
背景技术:
2.近年来,目标跟踪技术被广泛应用于农业、安防、军事等各个领域,对农业发展、安全监控、军事防御等作出了重要贡献,良好的图像跟踪性能是跟踪性能的核心保证,当前,图像跟踪领域新理论、新算法层出不穷,对于图像跟踪的速度、准确性、鲁棒性以及承载算法的硬件平台等都有了更高的要求。
3.因此,提供一种新的技术方案改善上述问题,是本领域技术人员急需解决的问题。
技术实现要素:
4.有鉴于此,本发明提供一种监控区域目标跟踪系统,以解决上述技术问题。
5.为实现上述目的,本发明提供如下技术方案:
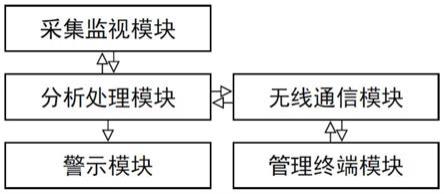
6.一种监控区域目标跟踪系统,包括采集监视模块、分析处理模块、警示模块、无线通信模块和管理终端模块。
7.在上述的方案中,所述采集监视模块用于获取监控区域的视频图像信息。
8.在上述的方案中,所述分析处理模块与所述采集监视模块相连接,所述警示模块与所述分析处理模块相连接,所述分析处理模块用于根据所述采集监视模块发送的信息控制所述采集监视模块和所述警示模块进行工作。
9.在上述的方案中,所述管理终端模块通过所述无线通信模块与所述分析处理模块相互通信,所述管理终端模块用于发送远程操作指令信息至所述分析处理模块,并接收所述分析处理模块发送的反馈信息。
10.在上述的方案中,所述采集监视模块包括可移动装置和摄像机单元,所述摄像机单元安装于所述可移动装置上,所述可移动装置用于承载所述摄像机单元,并在所述分析处理模块的控制下进行运动;所述摄像机单元用于实时获取待跟踪目标的视频信息。
11.在上述的方案中,所述可移动装置包括传感器单元、驱动单元和执行单元,所述传感器单元和所述驱动单元均与所述执行单元相连接,所述执行单元用于在所述驱动单元的驱动下执行相关动作,所述传感器单元用于获取所述执行单元的数据信息,所述传感器单元包括定位模块、避障模块和状态获取模块,所述定位模块用于获取可移动装置的方向、位置以及移动轨迹信息,所述定位模块包括电子磁盘传感器和gps定位器,所述避障模块包括超声波传感器和距离传感器,所述避障模块用于检测可移动装置运动过程中的障碍信息,所述状态获取模块用于获取可移动装置的姿态信息、运动速度信息以及运动加速度信息,所述状态获取模块包括陀螺仪、光电编码器、速度传感器和加速度计;所述驱动单元包括电机驱动器和多个伺服电机,所述电机驱动器与所述伺服电机相连接。
12.在上述的方案中,所述摄像机单元包括单目摄像机、调焦电机、高精度云台、角度传感器和云台驱动电机,所述单目摄像机、所述调焦电机和所述角度传感器均安装在所述
高精度云台上,所述单目摄像机用于采集监控区域的视频图像信息,所述调焦电机与所述单目摄像机相连接,所述调焦电机用于驱动所述单目摄像机进行调焦,所述角度传感器用于获取所述高精度云台的俯仰角坐标与水平角坐标,所述云台驱动电机与所述高精度云台相连接,所述云台驱动电机用于驱动所述高精度云台在俯仰和水平方向上旋转。
13.在上述的方案中,所述分析处理模块包括存储单元、采集控制单元、图像处理单元和目标跟踪单元,所述存储单元用于对所述采集监视模块发送的信息进行存储,所述采集控制单元和所述图像处理单元均与所述存储单元相连接,所述采集控制单元用于根据所述存储单元存储的信息控制所述采集监视模块进行工作,所述图像处理单元用于对所述存储单元存储的视频图像信息进行处理,所述目标跟踪单元与所述图像处理单元相连接,所述目标跟踪单元用于根据所述图像处理单元的处理结果进行目标跟踪处理。
14.在上述的方案中,所述图像处理单元包括清晰化模块,所述清晰化模块包括滤波单元、灰度化单元和缩放单元,所述滤波单元用于通过滤波算法对所述存储单元存储的视频帧进行滤波处理,所述灰度化单元与所述滤波单元相连接,所述灰度化单元用于通过双三次插值图像灰度处理法对经过所述滤波单元处理后的视频帧进行灰度化处理,所述缩放单元与所述灰度化单元相连接,所述缩放单元用于通过双线性插值法对经过所述灰度化单元处理后的视频帧进行局部缩放处理。
15.在上述的方案中,所述图像处理单元还包括运动目标检测模块,所述运动目标检测模块与所述清晰化模块相连接,所述运动目标检测模块包括相似度计算单元、差分计算单元、二值化单元、与操作单元和轮廓填充单元,所述相似度计算单元用于对从所述清晰化模块处理后的视频帧序列中选取任意相邻的三帧图像,并通过所述三帧图像中的两组相邻两帧图像颜色特征的巴氏距离来计算图像之间的相似度;所述差分计算单元与所述相似度计算单元相连接,所述差分计算单元用于判断所述相似度计算单元获取的相似度是否大于相似度阈值,并在相似度大于相似度阈值时,计算出三帧图像中的两组相邻两帧图像的差分图像;所述二值化单元与所述差分计算单元相连接,所述二值化单元用于对所述差分计算单元获取的差分图像进行二值化处理;所述与操作单元与所述二值化单元相连接,所述与操作单元用于对所述二值化单元获取的二值化图像进行与操作处理,并得到初始运动目标;所述轮廓填充单元与所述与操作单元相连接,所述轮廓填充单元用于对所述与操作单元获取的初始运动目标进行形态学及连通性处理得到最终运动目标。
16.在上述的方案中,所述目标跟踪单元包括跟踪模块和预警判断模块,所述跟踪模块包括关联匹配单元和列表更新单元,所述关联匹配单元用于将所述图像处理单元获取的运动目标信息输入到卡尔曼滤波算法中进行跟踪,并通过数据关联算法将当前帧的目标检测结果与前一帧跟踪的目标进行关联匹配,所述列表更新单元与所述关联匹配单元相连接,所述列表更新单元用于对于每一个跟踪目标,统计至上一帧成功匹配以来未匹配成功的帧数,并在未匹配成功的帧数是否超过未匹配成功预设值时,控制当前帧的跟踪应该删除相应的目标;所述预警判断模块与所述跟踪模块相连接,所述预警判断模块包括速度异常判断单元和越界判断单元,所述速度异常判断单元用于根据跟踪目标框中心位置以及视频序列的帧间间隔时间计算各运动目标在摄像机视野范围内的运动速度,并在运动目标的运动速度发生突变时发送报警控制信号,所述越界判断单元用于获取警戒区域的位置信息和运动目标位置信息,并通过透视变换模型所述警戒区域的位置信息和运动目标位置信息
进行转换后,将转换后的运动目标的位置坐标和警戒区域的位置坐标进行比较,判定运动目标在警戒区域内时发送报警控制信号。
17.在上述的方案中,所述警示模块包括显示单元,所述显示单元包括tft触摸显示屏和背光板,所述tft触摸显示屏用于对所述分析处理模块发送的信息进行显示,并接收用户的触摸操作信号,所述背光板用于控制所述tft触摸显示屏的亮度,所述背光板包括升压转换器、mos开关管和led灯串,所述升压转换器用于将交流输入电压转换为直流电压,所述mos开关管与所述升压转换器相连接,所述led灯串与所述mos开关管相连接,所述mos开关管用于驱动所述led灯串开启、关闭以及改变亮度。
18.在上述的方案中,所述警示模块还包括报警单元,所述报警单元包括声光报警器和报警按键,所述声光报警器用于在所述分析处理模块的控制下进行声光报警,所述报警按键与所述声光报警器相连接,所述报警按键用于关断和开启所述声光报警器。
19.综上所述,本发明的有益效果是:通过采集监视模块获取监控区域的视频图像信息以及可移动装置的信息,通过分析处理模块对根据采集监视模块发送的信息处理后,控制可移动装置实时追踪目标,并实时采集包含追踪目标的视频信息,同时,在追踪过程中追踪目标异常时进行报警,可提高跟踪的速度和准确性。
附图说明
20.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
21.图1为本发明中监控区域目标跟踪系统的组成示意图。
22.图2为本发明中采集监视模块的组成示意图。
23.图3为本发明中传感器单元的组成示意图。
24.图4为本发明中分析处理模块的组成示意图。
25.图5为本发明中图像处理单元的组成示意图。
26.图6为本发明中目标跟踪单元的组成示意图。
27.图7为本发明中警示模块的组成示意图。
具体实施方式
28.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施方式和附图,对本发明做进一步详细说明。在此,本发明的示意性实施方式及其说明用于解释本发明,但并不作为对本发明的限定。
29.如图1所示,本发明的一种监控区域目标跟踪系统,包括采集监视模块、分析处理模块、警示模块、无线通信模块和管理终端模块。
30.下面结合附图对本发明上述各模块间的连接关系做进一步详细说明。
31.所述采集监视模块用于获取监控区域的视频图像信息;所述分析处理模块与所述采集监视模块相连接,所述警示模块与所述分析处理模块相连接,所述分析处理模块用于根据所述采集监视模块发送的信息控制所述采集监视模块和所述警示模块进行工作;所述管理终端模块通过所述无线通信模块与所述分析处理模块相互通信,所述管理终端模块用于发送远程操作指令信息至所述分析处理模块,并接收所述分析处理模块发送的反馈信
息。
32.在本实施例中,所述无线通信模块包括wifi通信单元、4g通信单元和5g通信单元中的一种或多种,所述管理终端模块包括电脑。
33.如图2所示,所述采集监视模块包括可移动装置和摄像机单元,所述摄像机单元安装于所述可移动装置上,所述可移动装置用于承载所述摄像机单元,并在所述分析处理模块的控制下进行运动;所述摄像机单元用于实时获取待跟踪目标的视频信息。
34.在本实施例中,所述可移动装置包括移动机器人以及无人机等。
35.如图2和图3所示,所述可移动装置包括传感器单元、驱动单元和执行单元,所述传感器单元和所述驱动单元均与所述执行单元相连接,所述执行单元用于在所述驱动单元的驱动下执行相关动作,所述传感器单元用于获取所述执行单元的数据信息,所述传感器单元包括定位模块、避障模块和状态获取模块,所述定位模块用于获取可移动装置的方向、位置以及移动轨迹信息,所述定位模块包括电子磁盘传感器和gps定位器,所述避障模块包括超声波传感器和距离传感器,所述避障模块用于检测可移动装置运动过程中的障碍信息,所述状态获取模块用于获取可移动装置的姿态信息、运动速度信息以及运动加速度信息,所述状态获取模块包括陀螺仪、光电编码器、速度传感器和加速度计;所述驱动单元包括电机驱动器和多个伺服电机,所述电机驱动器与所述伺服电机相连接。
36.在本实施例中,所述电子磁盘传感器用于获取可移动装置的方向信息,所述gps定位器用于获取所述可移动装置的实时位置信息,所述分析处理模块根据可移动装置的方向信息和实时位置信息可得到可移动装置的移动轨迹信息;所述超声波传感器用于检测可移动装置运动过程中是否存在障碍,所述距离传感器用于获取障碍的距离信息;所述陀螺仪用于获取可移动装置运动过程中的姿态信息,所述光电编码器用于获取可移动装置运动过程中旋转轴的角度信息,所述速度传感器用于获取可移动装置运动过程中的运动速度信息,所述加速度计用于获取可移动装置运动过程中的运动加速度信息。
37.进一步地,所述摄像机单元包括单目摄像机、调焦电机、高精度云台、角度传感器和云台驱动电机,所述单目摄像机、所述调焦电机和所述角度传感器均安装在所述高精度云台上,所述单目摄像机用于采集监控区域的视频图像信息,所述调焦电机与所述单目摄像机相连接,所述调焦电机用于驱动所述单目摄像机进行调焦,所述角度传感器用于获取所述高精度云台的俯仰角坐标与水平角坐标,所述云台驱动电机与所述高精度云台相连接,所述云台驱动电机用于驱动所述高精度云台在俯仰和水平方向上旋转。
38.在本实施例中,所述分析处理模块接收所述可移动装置和所述摄像机单元发送的数据信息,并根据跟踪目标信息控制所述可移动装置和所述摄像机单元进行工作,可实时采集到监控区域内的跟踪目标视频信息。
39.如图4所示,所述分析处理模块包括存储单元、采集控制单元、图像处理单元和目标跟踪单元,所述存储单元用于对所述采集监视模块发送的信息进行存储,所述采集控制单元和所述图像处理单元均与所述存储单元相连接,所述采集控制单元用于根据所述存储单元存储的信息控制所述采集监视模块进行工作,所述图像处理单元用于对所述存储单元存储的视频图像信息进行处理,所述目标跟踪单元与所述图像处理单元相连接,所述目标跟踪单元用于根据所述图像处理单元的处理结果进行目标跟踪处理。
40.如图5所示,所述图像处理单元包括清晰化模块,所述清晰化模块包括滤波单元、
灰度化单元和缩放单元,所述滤波单元用于通过滤波算法对所述存储单元存储的视频帧进行滤波处理,所述灰度化单元与所述滤波单元相连接,所述灰度化单元用于通过双三次插值图像灰度处理法对经过所述滤波单元处理后的视频帧进行灰度化处理,所述缩放单元与所述灰度化单元相连接,所述缩放单元用于通过双线性插值法对经过所述灰度化单元处理后的视频帧进行局部缩放处理。
41.进一步地,所述图像处理单元还包括运动目标检测模块,所述运动目标检测模块与所述清晰化模块相连接,所述运动目标检测模块包括相似度计算单元、差分计算单元、二值化单元、与操作单元和轮廓填充单元,所述相似度计算单元用于对从所述清晰化模块处理后的视频帧序列中选取任意相邻的三帧图像,并通过所述三帧图像中的两组相邻两帧图像颜色特征的巴氏距离来计算图像之间的相似度;所述差分计算单元与所述相似度计算单元相连接,所述差分计算单元用于判断所述相似度计算单元获取的相似度是否大于相似度阈值,并在相似度大于相似度阈值时,计算出三帧图像中的两组相邻两帧图像的差分图像;所述二值化单元与所述差分计算单元相连接,所述二值化单元用于对所述差分计算单元获取的差分图像进行二值化处理;所述与操作单元与所述二值化单元相连接,所述与操作单元用于对所述二值化单元获取的二值化图像进行与操作处理,并得到初始运动目标;所述轮廓填充单元与所述与操作单元相连接,所述轮廓填充单元用于对所述与操作单元获取的初始运动目标进行形态学及连通性处理得到最终运动目标。
42.如图6所示,所述目标跟踪单元包括跟踪模块和预警判断模块,所述跟踪模块包括关联匹配单元和列表更新单元,所述关联匹配单元用于将所述图像处理单元获取的运动目标信息输入到卡尔曼滤波算法中进行跟踪,并通过数据关联算法将当前帧的目标检测结果与前一帧跟踪的目标进行关联匹配,所述列表更新单元与所述关联匹配单元相连接,所述列表更新单元用于对于每一个跟踪目标,统计至上一帧成功匹配以来未匹配成功的帧数,并在未匹配成功的帧数是否超过未匹配成功预设值时,控制当前帧的跟踪应该删除相应的目标;所述预警判断模块与所述跟踪模块相连接,所述预警判断模块包括速度异常判断单元和越界判断单元,所述速度异常判断单元用于根据跟踪目标框中心位置以及视频序列的帧间间隔时间计算各运动目标在摄像机视野范围内的运动速度,并在运动目标的运动速度发生突变时发送报警控制信号,所述越界判断单元用于获取警戒区域的位置信息和运动目标位置信息,并通过透视变换模型所述警戒区域的位置信息和运动目标位置信息进行转换后,将转换后的运动目标的位置坐标和警戒区域的位置坐标进行比较,判定运动目标在警戒区域内时发送报警控制信号。
43.如图7所示,所述警示模块包括显示单元,所述显示单元包括tft触摸显示屏和背光板,所述tft触摸显示屏用于对所述分析处理模块发送的信息进行显示,并接收用户的触摸操作信号,所述背光板用于控制所述tft触摸显示屏的亮度,所述背光板包括升压转换器、mos开关管和led灯串,所述升压转换器用于将交流输入电压转换为直流电压,所述mos开关管与所述升压转换器相连接,所述led灯串与所述mos开关管相连接,所述mos开关管用于驱动所述led灯串开启、关闭以及改变亮度。
44.进一步地,所述警示模块还包括报警单元,所述报警单元包括声光报警器和报警按键,所述声光报警器用于在所述分析处理模块的控制下进行声光报警,所述报警按键与所述声光报警器相连接,所述报警按键用于关断和开启所述声光报警器。
45.在本实施例中,在所述声光报警器报警过程中,用户可通过按压所述报警按键来关断所述声光报警器。
46.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1