电子设备的制作方法
1.本发明涉及具有转动驱动装置的电子设备,更具体地涉及具有通过配线连接到固定单元的转动驱动单元的电子设备。
背景技术:
2.近年来,通过无线通信连接到智能手机、个人计算机、平板终端或其它装置的多用途相机得到广泛使用,并且这种相机使得远离相机的位置处的使用者能够查看来自相机的图像。
3.这种与诸如图像识别和人工智能等技术结合的相机已经用于各种应用中。
4.各种应用涵盖了广泛的领域,包括监测建设现场作业人员的施工进度和健康状况的野外作业支援,以及使用安装在老年设施中的这种相机以防止居民忘记服用常用药或误服药物的应用。
5.作为示例,可应用于这种多用途相机的壳体构造是具有通过水平转动和竖直转动设定的摄像方向的相机设备(日本特开2002-369038号公报)。
6.根据日本特开2002-369038号公报,摄像设备在水平转动单元中包括摄像器件和竖直转动机构,并且还在固定单元中包括水平转动机构、水平转动驱动机构、竖直转动驱动机构以及其它机构。
7.来自转动单元中的摄像器件的摄像信号被发送到固定单元并由控制回路板处理。
8.如日本特开平8-178182号公报和日本特开2014-212392号公报中讨论的柔性电缆被用来发送摄像信号并且构造成跟随可动部相对于固定单元的动作。
9.然而,根据日本特开平8-178182号公报,电缆是松弛的而没有被限制在设备中。
10.这种构造允许减小由于跟随可动部而引起的电缆上的应力。另一方面,电缆会更加松弛从而减小电缆连接部上的应力,这不适合使设备小型化。
11.此外,根据日本特开2014-212392号公报的电缆在径向上松弛,这导致更大的投影面积。
12.由于没有考虑减小摄像设备的投影安装面积以使摄像设备可以安装在任何地方以及实现更小尺寸和更低轮廓的壳体,因此这种多用途相机不是真正的用户友好型。
13.因此,本发明旨在提供一种紧凑的转动驱动装置,其具有减少配线上的和配线连接部上的应力的配线构造。
技术实现要素:
14.根据本发明的一方面,电子设备包括:可动筒;支撑筒,其构造成以所述可动筒能够围绕平摇转动轴线转动的方式支撑所述可动筒;柔性配线,其连接到所述支撑筒中的平摇控制回路板;和收容区域,其将所述可动筒和所述支撑筒连通并收容所述柔性配线。所述柔性配线包括形成在所述可动筒上的第一被固定部和形成在所述支撑筒上的第二被固定部。在所述收容区域中,所述第一被固定部固定到所述可动筒的第一固定部。在所述收容区
域中,所述第二被固定部固定到所述支撑筒的第二固定部。
15.从以下参照附图对示例性实施方式的说明,本发明的其它特征将变得明显。
附图说明
16.图1是本发明的示例性实施方式中的摄像设备的立体图。
17.图2a和图2b是本发明的示例性实施方式中的摄像设备的分解立体图。
18.图3a至图3c是本发明的示例性实施方式中的线束的立体图。
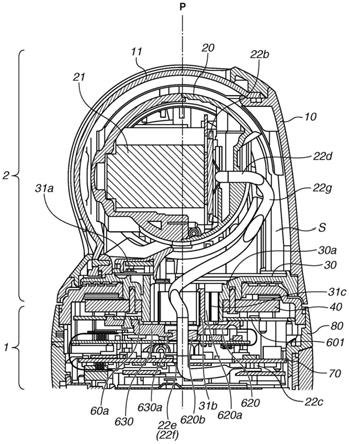
19.图4是本发明的示例性实施方式中的摄像设备的主要部件的截面图。
20.图5是本发明的示例性实施方式中的在固定柔性回路板的部分及其邻近区域处的线束和部件的详细构造的立体图。
21.图6是本发明的示例性实施方式中的摄像设备的俯视图。
22.图7是本发明的摄像功能的框图。
具体实施方式
23.在下文中,将参照附图说明本发明的示例性实施方式中的作为电子设备的摄像设备100。相同的附图标记在附图中表示相同的要素。
24.本发明中的支撑筒1(固定部)和可动筒2(可动部)不限于圆柱形,而是可以为矩形(例如立方体)。
25.图1是作为本发明的示例性实施方式中的电子设备的摄像设备100的立体图。图2a和图2b是本发明的示例性实施方式中的摄像设备100的分解立体图。
26.(摄像设备100的立体图)
27.摄像设备100主要包括可动部2和固定部1。可动部2主要包括顶盖10、俯仰单元20、平摇单元基座30和平摇单元转动板40。
28.固定部1主要包括基座盖50、机架单元60、回路板组件70和底部单元80。
29.可动部2相对于固定部1可围绕转动轴线p水平转动(平摇)地被保持在固定部1的顶部。
30.顶盖10包括由诸如丙烯酸树脂的透明树脂材料模制而成的透明圆顶11。
31.平摇单元基座30位于顶盖10的内部,并且用多个螺钉保持顶盖10。
32.俯仰单元20在顶盖10的内部并且相对于平摇单元基座30可围绕转动轴线t竖直转动(俯仰)地被保持。
33.转动轴线p和转动轴线t彼此正交,但在一个或多个实施方式中它们彼此不正交。
34.具有摄像光学系统的镜筒单元21位于俯仰单元20中。
35.镜筒单元21内部包括未示出的摄像器件。
36.摄像器件包括诸如电荷耦合器件(ccd)传感器或互补金属氧化物半导体(互补mos)传感器的光电转换器件和低通滤波器。
37.低通滤波器阻止红外光进入单元以防止彩色莫尔图案的出现。
38.摄像器件与俯仰单元20中的其它电子部件一起安装在未示出的印刷回路板上。线束22电连接到印刷回路板。
39.基座30包括驱动俯仰单元20的俯仰驱动源32。
40.线束22连接到驱动源32,在收容区域s中延伸并且电连接到控制回路板组件70。
41.(线束22)
42.如图3a所示,线束22包括均由涂覆有绝缘体的导体的芯线构成的多根电线22a以及连接到电线22a的两端的连接器22b和22c。
43.电线22a在靠近连接器22b和22c的位置处用粘接带捆绑。
44.线束22中的电线22a可以是适当的均包括内导体、绝缘体、外导体和保护涂层的同轴电缆。
45.线束22从俯仰单元20的背面延伸,其中线束22的连接器22b电连接到印刷回路板,并且连接器22c电连接到固定部1的回路板组件70。
46.线束22还包括第一被固定部22d和第二被固定部22e。第一被固定部22d固定在俯仰单元20的背面,并且第二被固定部22e固定在固定部1的内部。
47.在根据本发明的示例性实施方式的摄像设备100中,线束22的第二被固定部22e包括作为围绕线束22的外周的一体化部分的衬套构件22f,并且利用衬套构件22f将线束22固定到固定部1的内部。
48.期望的是通过压接、粘合、嵌入成型或其它技术使衬套构件22f与线束22一体化。
49.线束22的第一被固定部22d由诸如缓冲垫等的弹性构件22j制成。利用弹性构件22j将线束22固定到俯仰单元20的背面。
50.衬套构件22f是装配到轴或圆筒形构件中以密封间隙或吸收震动的圆筒形或圆环形的机械零件。
51.第一被固定部22d与第二被固定部22e之间的区域为具有柔性的余长部分22g。
52.如下所述,跟随可动部2相对于固定部1的平摇驱动和俯仰驱动,余长部分22g在包含余长(extra length)的收容区域s中弯曲或扭曲。
53.余长部分22g至少具有足以跟随可动部2相对于固定部1的平摇驱动和俯仰驱动的长度。
54.上述在第一被固定部22d和第二被固定部22e这两个位置处的固定适合于确保余长部分22g的长度足够长以在有限的余长收容区域s中具有足够的柔性。
55.这是因为,如果在余长部分22g上增加第三被固定部,则余长部分22g会失去柔性,并难以平稳地跟随平摇驱动和俯仰驱动。
56.弯曲或扭曲的余长部分22g可以与限定余长收容区域s的内壁或其它区域轻微接触。
57.此外,如果长度足够长以跟随可动部2相对于固定部1的平摇驱动和俯仰驱动,则能够在第一被固定部22d和第二被固定部22e之间增加其它固定部。
58.这允许更牢固地固定线束22而不影响余长部分22g跟随平摇驱动和俯仰驱动。
59.(利用衬套构件22f将线束22固定到固定目标的方法)
60.将参照图3b和图3c说明利用衬套构件22f将线束22固定到固定目标的方法。
61.图3b和图3c是示出通过将衬套构件22f与固定目标接合来固定线束22的方法的图。
62.例如,如图3b所示,沿着与开口60a正交的方向将后述的基座机架601中的开口60a的边缘装配到衬套构件22f中的接合部22i中。
63.这允许线束22可靠地固定到固定目标并且防止线束22容易地脱离固定目标。
64.衬套构件22f可以与开口60a压配合。在这种情况下,期望的是衬套构件22f由诸如橡胶构件的弹性体制成。
65.图3c示出了用作线束22的连接器22c的相对大的连接器的情况。
66.在这种情况下,随着线束22的连接器22c的尺寸增大,基座机架601中的用于使连接器22c通过的开口60a变得更大。
67.这导致衬套构件22f的较大尺寸,用于如图3b所示使衬套构件22f的接合部22i与开口60a的端部接合,使线束22通过开口60a的可操作性变差。
68.为了解决这个问题,如图3c所示,将诸如保持构件6200和6300的其它构件放置在线束22的衬套构件22f和基座机架601之间以将衬套构件22f固定到基座机架601,改善了可操作性。
69.代替使用上述固定线束22的方法,衬套构件22f可以利用螺钉固定到固定目标或粘接安装到固定目标。
70.上述固定线束22的方法适用于俯仰单元20。
71.俯仰单元20包括位于镜筒单元21的两侧表面上的一对轴部。
72.平摇单元基座30包括沿着转动轴线t支撑俯仰单元20的轴部的一对轴承部。
73.将各个轴部装配到相应的轴承部允许相对于平摇单元基座30可转动地保持俯仰单元20。
74.平摇单元基座30包括沿转动轴线p的推力方向延伸的中空转动轴30a。
75.基座盖50具有在转动轴线p的推力方向上延伸的圆筒部50a。
76.将中空转动轴30a装配到圆筒部50a中允许平摇单元基座30可相对于基座盖50转动。
77.在基座盖50装配在平摇单元基座30和平摇单元转动板40之间的情况下将平摇单元基座30安装在基座盖50上,并且平摇单元基座30被保持为可围绕转动轴线p转动。
78.平摇单元基座30还包括柔性回路板31和电连接到柔性回路板31的俯仰驱动单元32。
79.柔性回路板31电连接到固定部1中的回路板组件70,并且表现为跟随平摇单元基座30相对于固定部1的平摇驱动。
80.当输入来自回路板组件70的驱动信号时,俯仰驱动单元32产生驱动力以使俯仰单元20执行俯仰驱动。
81.机架单元60包括基座机架601和多个金属支撑件。
82.基座机架601由诸如铝或不锈钢(sus)的材料制成,并且通过冲压加工或拉拔成预期形状而形成。
83.金属支撑件由sus材料或黄铜材料(bs材料)制成,并且共同固定到基座机架601。
84.支撑件被攻丝以用于螺纹紧固。利用未示出的螺钉将机架单元60固定到基座盖50。
85.机架单元60还包括平摇驱动单元610。平摇驱动单元610包括柔性回路板,其中柔性回路板的一端电连接并固定到回路板组件70。
86.在输入来自回路板组件70的驱动信号时,平摇驱动单元610产生驱动力以使平摇
单元转动板40执行平摇驱动。
87.利用螺钉将回路板组件70固定为与机架单元60的金属支撑件接触。
88.机架单元60的基座机架601在中央具有大致圆形的开口60a。
89.线束22和柔性回路板31穿过开口60a到达回路板组件70。
90.底部单元80包括用于操作摄像设备100的电池和能够从外部按下的操作钮。
91.通过利用螺钉(未示出)将底部单元80固定到基座盖50来组装固定部1,完成图1所示的摄像设备的组装。
92.(图7中的框图的说明)
93.图7是示出作为本发明中的摄像设备的示例的摄像设备100的构造示例的框图。
94.参照图7,系统控制单元219包括处理器(例如,cpu(中央处理单元)、gpu(图形处理单元)、微处理器或mpu(微处理单元))和存储器(例如,dram(动态随机存取存储器)或sram(静态ram))。
95.它们执行各种类型的处理以控制摄像设备100的各个块。
96.非易失性存储器(eeprom(电可擦除可编程只读存储器))210是存储用于操作控制单元的常数和程序的电可擦除/可记录存储器。
97.参照图7,变焦单元201包括用于执行放大的变焦透镜。变焦驱动控制单元202执行变焦单元201的驱动控制。
98.调焦单元203包括用于调节焦距的透镜。调焦驱动控制单元204执行调焦单元203的驱动控制。
99.在成像单元206中,诸如ccd或cmos等的摄像器件将通过光学系统输入的光学像转换成电信号,并将基于入射光量的关于电荷的信息作为模拟图像数据输出到图像处理单元207。
100.图像处理单元207对通过a/d转换输出的数字图像数据执行诸如歪斜校正、白平衡调节和颜色插值等的图像处理,并输出经过图像处理的数字图像数据。
101.图像记录单元208将从图像处理单元207输出的数字图像数据转换为诸如jpeg(联合图像专家组)格式等的记录格式的数据,并将该数据传输到存储器209和图像输出单元212。
102.镜筒转动驱动单元205使俯仰驱动单元32和平摇驱动单元610在俯仰方向和平摇方向上驱动镜筒。
103.设备抖动检测单元222包括检测摄像设备100的三轴角速度的角速度计(陀螺仪传感器)和检测设备的三轴加速度的加速度计(加速器传感器)。
104.设备抖动检测单元222基于检测到的信号计算设备的转动角度和移动量。
105.麦克风(声音输入单元)213获取摄像设备周围的声音信号。声音信号通过放大器或其它部件进行a/d转换,并且麦克风213将转换后的信号传输到声音处理单元214。
106.声音处理单元214执行诸如使输入的数字声音信号合适等的声音相关的处理。
107.然后,系统控制单元219将声音处理单元214所处理的声音信号传输到存储器209。
108.存储器209临时存储来自图像处理单元207和声音处理单元214的图像信号和声音信号。
109.图像处理单元207和声音处理单元214读取临时存储在存储器209中的图像信号和
声音信号,并对它们进行编码以生成压缩图像信号和压缩声音信号。
110.系统控制单元219将这些压缩图像信号和压缩声音信号传输到记录/再现单元216。
111.记录/再现单元216在记录介质217上记录压缩图像信号、压缩声音信号以及其它摄像相关的控制数据。
112.记录介质217可以是包括在摄像设备100中的记录介质或者可拆卸地安装于摄像设备100的记录介质。
113.记录介质217能够记录诸如压缩图像信号、压缩声音信号和由摄像设备100产生的声音信号的各种数据,并且通常具有比非易失性存储器210大的容量。
114.记录介质217的示例包括任何类型的记录介质,诸如硬盘、光盘、磁光盘、cd-r(可记录光盘)、dvd-r(可记录数字多功能盘)、磁带、非易失性半导体存储器和闪存。
115.记录/再现单元216从记录介质217读取(和再现)压缩图像信号、压缩声音信号、声音信号、各种数据和程序。
116.记录/再现单元216然后将读取的压缩图像信号和压缩声音信号传输到图像处理单元207和声音处理单元214。
117.图像处理单元207和声音处理单元214分别将压缩图像信号和压缩声音信号临时存储在存储器209中,根据预定程序对这些信号进行解码,并将解码后的信号分别传输到图像输出单元212和扬声器(声音输出单元)215。
118.扬声器(声音输出单元)215输出在摄像时或其它时机预设的声音模式。
119.发光器件(led)控制单元211以在摄像时或其它时机预设的点亮/闪烁模式控制摄像设备100中的led。
120.图像输出单元212例如包括图像输出端子,并将用于图像显示的图像信号传输到外部连接的显示装置或其它装置。
121.通信单元218允许摄像设备100和外部设备之间的通信,并且传输和接收诸如声音信号、图像信号、压缩声音信号和压缩图像信号的数据。
122.作为示例,通信单元218接收用于拍摄开始命令、拍摄结束命令以及平摇/俯仰和变焦驱动的与摄像相关的控制信号,并且按照从可与摄像设备100通信的外部装置发出的指令来驱动摄像设备100。
123.通信单元218是诸如红外通信模块、通信模块、无线lan通信模块或gps接收器等的无线通信模块。
124.电源控制单元220包括电池检测回路、dc-dc(直流-直流)转换器和切换要通电的块的开关回路,并且检测是否存在安装的电池、电池的类型和电池的剩余容量。
125.电源控制单元220还基于检测结果和来自系统控制单元的指令来控制dc-dc转换器,并且在适当的时间段内向包括记录介质217的部件供应适当的电压。
126.电源单元221包括诸如碱性电池或锂电池等的一次电池、诸如nicd电池、nimh电池或li电池等的二次电池,或者ac适配器等。
127.电源单元221和电源控制单元220经由电源连接器和相机上的电源连接器彼此连接。
128.(摄像设备100中的配线和主要部件的截面图)
129.图4是用于说明配线的作为电子设备的摄像设备100中的主要部件的截面图。
130.摄像设备100包括可动筒2和支撑筒1,支撑筒1以可动筒2能够围绕平摇转动轴线p转动的方式支撑可动筒2。
131.摄像设备100还包括线束22,其连接支撑筒中的平摇控制回路板组件70和收容区域s。收容区域s位于可动筒2中,与支撑筒1连通,并包含线束22。
132.为了简单说明,截面图示出了作为俯仰单元20及其附近的主要部分的线束22的第一被固定部22d,以及固定部1的转动轴线p及其附近。
133.线束22和柔性回路板31在平摇单元基座30中的中空转动轴30a内延伸并且连接到回路板组件70,该转动轴30a沿转动轴线p的推力方向延伸并穿过基座机架601中央的开口60a。
134.线束22的第一被固定部22d固定到俯仰单元20的背面,并且第二被固定部22e固定到固定部1中的基座机架601。
135.因此,线束22的余长部分22g被包含在第一被固定部22d和第二被固定部22e之间的余长收容区域s中。
136.在余长收容区域s中,线束22的余长部分22g表现为跟随可动部2相对于固定部1的平摇驱动和俯仰驱动。
137.在平摇驱动和俯仰驱动期间,由于余长部分22g的弯曲和扭曲,第二被固定部22e很可能承受载荷。
138.如上所述,经由与线束22一体化的衬套构件22f的固定防止了固定部移动。
139.另一方面,第一被固定部22d在俯仰驱动期间主要由于余长部分22g的弯曲而承受载荷,并且几乎不会由于余长部分22g的扭曲而承受载荷。
140.因此,与应用于第二被固定部22e的方法相比,可以将相对粗略的固定方法应用于第一被固定部22d。
141.本示例性实施方式的摄像设备100使用弹性构件22j,诸如用于第一被固定部22d的缓冲垫等。
142.通过被夹在包括在俯仰单元20中的上盖和下盖之间的弹性构件22j来固定线束22。
143.用于第一被固定部22d的弹性构件22j以更可靠的方式防止固定部移动,并在弹性构件22j被夹在上盖20a和下盖20b之间的情况下减小线束22上的应力。
144.另一方面,柔性回路板31在余长收容区域s中围绕线束22多次卷绕,并连接到回路板组件70。
145.利用未示出的双面粘接带等将柔性回路板31的一端31a粘接固定到平摇单元基座30,并利用未示出的双面粘接带等将另一端31b粘接固定到后述的第一保持构件620上的立壁部620a。
146.这允许柔性回路板31的卷绕部31c与线束22的余长部分22g一起被包含在余长收容区域s中的预定位置处。
147.卷绕部31c在余长收容区域s中随着可动部2相对于固定部1的平摇驱动而变松或变紧。
148.在本示例性实施方式中,线束22的第一被固定部22d处在可动筒2中并且第二被固
定部22e处在支撑筒1中。
149.在收容区域s中,第一被固定部22d固定到可动筒2的第一固定部。
150.在收容区域中,第二被固定部22e固定到支撑筒1的第二固定部。
151.第二被固定部22e在支撑筒1的收容区域s中与可动筒2的平摇转动轴线p并排固定,而不是在可动筒2的收容区域s中与可动筒2的平摇转动轴线p并排固定。
152.第二被固定部22e是作为围绕线束22的外周的一体化部分的衬套构件22f。
153.可动筒2包括基座30和俯仰单元20,基座30以可围绕平摇转动轴线p转动的方式支撑在支撑筒1上,俯仰单元20以可围绕在与平摇转动轴线p不同的方向上延伸的俯仰转动轴线t转动的方式支撑在基座30上。
154.线束22从俯仰单元20延伸。
155.第一被固定部22d是在线束22的外周上的弹性构件22j。
156.弹性构件22j被夹在俯仰单元20中。
157.第一被固定部22d沿着与俯仰单元20的俯仰转动轴线t平行的方向在远离基座30的平摇转动轴线p的预定距离l的位置处固定到俯仰单元20。
158.在可动筒2的收容区域s中,线束22在与线束22从俯仰单元20延伸的方向相反的方向上松弛。
159.支撑筒1包括保持线束22的第一保持构件620和将衬套构件22f与第一保持构件620固定在一起的第二保持构件630。
160.衬套构件22f包括在与线束22的配线长度方向正交的方向上的接合部22i和在比接合部22i靠近线束22的端部的位置处的接触部22h。
161.在基座30和控制回路板组件70之间,将接合部22i装配到第二保持构件630上的接合部630a中,并且接触部22h与第一保持构件620上的接触部620b接触。
162.(固定部1中的线束22的固定方法和柔性回路板31的固定方法)
163.下面,将参照图5具体说明固定部1中的线束22的固定方法和柔性回路板31的固定方法。
164.图5是用于在固定部1中固定线束22和柔性回路板31的部件的详细构造的分解立体图。
165.第一保持构件620和第二保持构件630位于余长收容区域s下方。
166.第一保持构件620包括沿着转动轴线p朝向俯仰单元20突出的立壁部620a,并且柔性回路板31的另一端31b粘接固定到立壁部620a。
167.第一保持构件620安装至基座机架601,其中立壁部620a在余长收容区域s中突出。
168.因此,柔性回路板31的卷绕部31c被包含在余长收容区域s中的预定位置处。
169.第二保持构件630在与转动轴线p大致正交的方向上包括接合部630a,并且作为围绕线束22的外周的一体化部分的衬套构件22f的接合部22i被装配到接合部630a。
170.保持线束22的第二保持构件630由第一保持构件620定位。
171.同时,在衬套构件22f的接触部22h与第一保持构件620的接触部620b接触的状态下,第二保持构件630安装到基座机架601。
172.因此,在线束22的余长部分22g被包含在余长收容区域s中的情况下沿着转动轴线p保持线束22。
173.由于与第二保持构件630接合的衬套构件22f与第一保持构件620接触,因此当线束22在余长收容区域s中扭曲时线束22不会转动。
174.在上述构造中,线束22经由作为一体化部分的衬套构件22f固定到固定部1,防止线束22容易地脱落。
175.换句话说,线束22的余长部分22g在余长收容区域s中跟随可动部2的平摇驱动和俯仰驱动而弯曲或扭曲,同时保持长度。
176.当线束22的余长部分22g在余长收容区域s中弯曲或扭曲时,线束22保持就位,防止了回路板由于该行为而承受载荷。
177.利用通过粘接固定工艺保持柔性回路板31的第一保持构件620对衬套构件22f定位使得容易控制线束22和柔性回路板31之间的位置关系。
178.因此,该构造使得容易进行线束22和柔性回路板31的位置设定,以防止两者在运动中彼此接触,防止了由于彼此接触而导致的线束断裂或其它损坏。
179.在可动部2的平摇驱动期间,线束22围绕转动轴线p扭转而不翘曲。这实现了线束22在摄像设备100中占据小得多的面积。
180.换句话说,这减小了余长收容区域s,导致摄像设备100的小型化。
181.在本发明的示例性实施方式中,线束22和柔性回路板31在包括平摇单元基座30的中空转动轴30a的内侧的余长收容区域s中延伸并且连接到回路板组件70。
182.这消除了从平摇单元基座30的侧方拉出线束22和柔性回路板31的需要。
183.这实现了跟随可动部2而翘曲的线束22和柔性回路板31占据小得多的空间。
184.换句话说,与从平摇单元基座30的侧方拉出线束22和柔性回路板31的情况相比,能够减小沿着轴线p观察时的摄像设备100的尺寸。
185.另一方面,由于余长收容区域s随着摄像设备100的小型化而减小,因此线束22的可包含在余长收容区域s中的余长部分22g的长度变得更小。
186.根据本发明的示例性实施方式,连同余长收容区域s的有效使用,线束22的余长部分22g具有足以跟随可动部2相对于固定部1的平摇驱动和俯仰驱动的长度。
187.(摄像设备100的俯视图)
188.图6是本发明的示例性实施方式中的摄像设备100的俯视图。在图6中,顶盖10未示出,为了便于说明,由虚线示出了镜筒单元21和线束22。
189.利用连接器22b连接到镜筒单元21的线束22的第一被固定部22d在与转动轴线t平行的方向上远离转动轴线p预定距离l的位置处固定到并保持在俯仰单元20的背面。
190.线束22的余长部分22g在平行于转动轴线t的方向上被包含在余长区域s中,以在与l相反的方向上翘曲,并且沿着转动轴线p被固定和保持。
191.这确保了线束22的余长部分22g的长度足以跟随可动部2相对于固定部1的平摇驱动和俯仰驱动。
192.本发明的支撑筒1(固定部)和可动筒2(可动部)的形状不限于圆柱形,也可以是矩形(例如立方体)。
193.以上已经说明了本发明的示例性实施方式和应用示例。然而,本发明不限于这些示例性实施方式并且能够在不脱离本发明的主旨的情况下进行变型和改变。
194.根据本发明,能够提供一种紧凑的转动驱动装置,其具有减小配线上的和配线的
连接部上的应力的配线构造。
195.虽然已经参照示例性实施方式说明了本发明,但是应当理解,本发明不限于所公开的示例性实施方式。所附权利要求的范围应被赋予最广泛的解释以涵盖所有此类变型、等同结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1