一种短波多载波信号的同步捕获方法
1.本发明属于通信技术领域,具体的说是涉及具有前导序列的短波多载波信号的同步捕获方法。
背景技术:
2.短波通信以其设备简单、通信方式灵活、抗毁性强、通信距离远等特点在远距离通信领域中是重要的无线通信方式,同时在军用和民用通信中应用很广泛,但是短波信道存在多径时延、衰落、多普勒频移、频移扩散和电台干扰等一系列复杂现象,而且因为多径时延大,对大多数短波通信系统,短波天波信道具有频率的选择性,造成短波通信信号的严重衰落和符号干扰;多载波技术在克服多径传播、信道衰落、多普勒频移、提高数据速率等方面具有突出的优势,因而在短波通信中得到了广泛应用;在短波多载波通信系统中,同步是数据正确传输的前提,同步捕获作为同步技术中最重要的一环,包括时间同步和频率同步两部分;通常情况下,接收端并不知道信号的开始位置,无法直接接收并解调出数据信息,故需要时间同步;接收信号的载波和本地载波也并不完全同步,存在频率偏移(简称频偏),故需要频率同步;但是对于多载波系统,各种同步误差会引入信道间干扰(inter-channel interference,ici)、符号间干扰(inter-symbol interference,isi),并且还会破坏多载波系统内各子载波的正交性,使得在接收端无法正确接收数据,极大地影响了多载波系统的性能;因此如何实现短波多载波信号的时间同步和频率同步是同步捕获的一个难题。
3.常见的短波多载波信号有美国环球无线电通信公司的商用产品ard9900调制信号,美国短波通信mil-std-188-110系列标准中的16音及39音多载波信号等;这些信号都具有前导序列,数据帧格式如附图1所示,每条消息的开始都有前导序列,然后是多帧数据,每帧数据由帧同步序列和数据段构成,最后是消息结束(end-of-message,eom)指示;通常前导序列是由多个不同频率的前导调制符号序列组成,前导序列所用的频率又称为前导音,一般情况下各前导音的功率会比数据段各子载波功率高,所以可利用前导序列进行同步。
4.目前常用的对于有前导序列的短波多载波信号的同步捕获方法主要有两种:1)基于前导序列的同步捕获,该方法的前提是收端已知发端信号的前导序列图案设计规律;一般都是基于前导序列的周期性,进行信号相关检测,从而实现对信号的同步捕获;2)利用时域滑动窗检测前导序列的功率谱,计算各前导音的信噪比之和,并设定捕获门限进行信号捕获;方法1适用于协作式通信,而在非协作情况下对于收端未知发端前导设计规律的半盲或全盲状态,不能利用此方法进行同步捕获;方法2只是利用了时域滑动检测窗而没有考虑接收信号在较大频偏时前导音的功率会变得比较低的情况,从而在较大频偏时容易发生信号漏检导致无法同步捕获;另外,这种方法只是粗略地检测到信号的开始位置,并未考虑初始时偏和频偏的估计;因此这两种方法虽然可以实现某些情况下的信号捕获,但在非协作通信或者频偏较大情况下会有局限性,导致无法正确同步。
技术实现要素:
5.为解决现有技术的不足,针对短波多载波信号的同步捕获问题,本发明提供了一种有前导音存在的短波多载波信号的同步捕获方法;在该方法中,利用信号中前导音频率信息,在时域和频域同时以滑动窗方式对信号进行功率谱分析,一个时频滑动窗在时域上包括多个多载波符号,在频域上覆盖正负多个子载波间隔的频偏,以时频滑动窗内多个符号的前导音平均信噪比作为捕获判断标准;若当前滑动窗长内前导音平均信噪比大于捕获门限且高信噪比的符号个数大于一定值,则认为捕获成功;同时,当前滑动窗所对应的时域和频域位置即分别为初始时偏估计值(信号起始位置)和初始频偏估计值的计算依据;该方法充分利用前导音信号特性,联合多符号的时频分析,在大频偏下仍能正常同步捕获,提高了同步捕获的鲁棒性,能很好地完成有前导序列的短波多载波信号的同步捕获;同时也进行了初始时偏和频偏的估计,为之后的正确解调奠定基础,另外本发明也可应用于非协作通信场景下。
6.为了方便描述本发明的内容,以ard9900短波正交频分复用(orthogonal frequency division multiplexing,ofdm)信号为例进行短波多载波信号同步捕获方法的说明;ard9900调制解调器是ofdm体制在短波通信中的具体应用,具有传输数字语音、图像以及数据的功能;ard9900调制解调器消息格式如附图2所示,包含前导段、1帧数据和eom三个部分,其中前导段又由前导序列和参考相位符号两个部分组成,每个ofdm符号周期为20ms,第一部分的前导序列持续84个ofdm符号周期,是由3个前导音调制符号序列组成,前导音的调制方式采用的是dbpsk方式,调制符号为全1;第二部分的参考相位符号持续1个ofdm符号周期,包含了36个子载波,用于后续帧同步dqpsk调制符号序列的初相参考,子载波间隔为62.5hz;由于前导序列持续时间较长,且比数据子载波功率高,可以用于进行信号的捕获、定时同步以及频偏估计。
7.时频滑动检测示意图如附图3所示,其中,ofdm符号周期为n
ofdm
个样点,前导序列中有n
p
个前导音,对接收数据用长度为n
fft
个样点的时域检测窗进行检测,n
fft
为fft的点数;为降低运算复杂度,检测窗以步长为n
step
个样点进行滑动,n
step
=n
ofdm
/n
seg
,其中1《n
seg
<<n
ofdm
/2,且n
seg
为n
ofdm
的因数;此时一个ofdm符号以滑动步长n
step
为间隔被分为了n
seg
个位置,每个位置对应一个时偏,每滑动n
step
个样点,就以当前时偏为起点,取出n
fft
个样点做fft进行功率谱分析,不同ofdm符号的相同时偏位置可以认为是同一组;根据不同组(时偏)之间的前导音信噪比(signal-to-noise ratio,snr)差异可以进行捕获和时频粗同步;时频检测窗的前导音snr可表示为:其中snr
ij
是时偏为(j-1)n
step
个样点且频偏为(i-n
sc_ofst-1)
△
f情况下的捕获窗长内n
acq
个符号的平均信噪比,n
sc_ofst
为最大子载波偏移量,
△
f为子载波间隔;计算公式可表示为:f为子载波间隔;计算公式可表示为:为当前捕获窗内n
acq
个ofdm符号的n
p
个前导音的平均功率,为当前捕获窗内的噪声平均功率,前导音及噪声频点的频率取值则根据当前频域滑动窗口所对应的频偏设置值而变化。
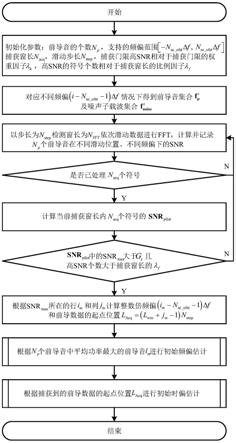
8.一种有前导音的短波ofdm信号的同步捕获方法,具体步骤如下:
9.s1、初始化参数:前导音的个数n
p
,最大子载波偏移量n
sc_ofst
,支持的频偏范围为[-n
sc_ofst
△
f,n
sc_ofst
△
f],捕获窗长n
acq
,滑动步长n
step
,捕获信号的信噪比门限为g
t
,高snr相对于捕获信噪比门限的比例因子为λh(若snr大于λ
hgt
则视为高snr),高snr的符号个数相对于捕获窗长n
acq
的比例因子为λf;
[0010]
s2、将对应不同频偏(i-n
sc_ofst-1)
△
f下的短波ofdm信号前导音作为前导音集合,将接收滤波带宽内的所有子载波构成的集合中去除前导音及其左右各两个子载波后剩余的子载波作为噪声子载波集合;
[0011]
s3、以步长为n
step
,检测窗长为n
fft
依次滑动接收的短波ofdm信号数据进行fft,计算并记录n
p
个前导音在不同滑动位置、不同频偏下的snr,对于每个符号共有n
seg
(2n
sc_ofst
+1)个时偏频偏组,对应n
seg
(2n
sc_ofst
+1)个snr值;
[0012]
s4、判断是否已处理n
acq
个符号,若是则计算当前捕获窗长n
acq
内的snr
pilot
;否则,转s3;
[0013]
s5、找出snr
pilot
中的最大值snr
max
,判断snr
max
是否大于g
t
且snr
pilot
中的高snr snr
high
(snr
high
≥λ
hgt
)的个数n
high
是否大于捕获窗长的λf,若是,则捕获成功;否则,转s3;
[0014]
s6、snr
max
在snr
pilot
中的列jm对应的时偏粗估计值为(j
m-1)n
step
个样点,行im对应的整数倍频偏估计值为(i
m-n
sc_ofst-1)
△
f;根据时偏粗估计值(j
m-1)n
step
和当前时域滑动窗位置l
win
(l
win
=n
slide-n
acqnseg-(mod(n
slide-1,n
seg
)+1),n
slide
为滑动次数)可以计算出捕获到前导数据的起点位置l
acq
,即l
acq
=(l
win
+j
m-1)n
step
;
[0015]
s7、根据n
p
个前导音中平均功率最大的前导音lm进行初始频偏估计;
[0016]
s8、根据捕获到的前导数据的起点位置l
acq
进行初始时偏估计;
[0017]
进一步地,s7所述初始频偏估计具体步骤如下:
[0018]
s71、根据捕获到的前导数据的起点位置l
acq
和整数倍频偏估计值(i
m-n
sc_ofst-1)
△
f对n
p
个前导音分别求捕获窗长内的功率均值,找到功率均值最大的前导音lm;
[0019]
s72、对n
acq
个符号分别取出前导音lm及其左右频点l
m-1
,l
m+1
共3个子载波的频域信号v(lm),v(l
m-1),v(lm+1);
[0020]
s73、根据捕获窗长n
acq
内每个符号取出的3个子载波的信号,利用频偏估计公式分别估计频偏其中表示取实部操作;
[0021]
s74、对n
acq
个符号分别计算最大功率前导音lm的信噪比,若信噪比小于λ
hgt
,则该符号的频偏估计值视为异常值;若频偏估计绝对值大于0.5也视为异常值;去除异常估计值;
[0022]
s75、对去除了异常值后的多个符号估计得到的频偏求平均,即得到小数倍频偏初始频偏估计值是小数倍频偏加上整数倍频偏(i
m-n
sc_ofst-1)
△
f的和;
[0023]
进一步地,s8所述初始时偏估计具体步骤如下:
[0024]
s81、取出前导数据的起点位置l
acq
和整数倍频偏(i
m-n
sc_ofst-1)
△
f所对应的n
p
个前导音平均信噪比及其前后时偏对应的平均信噪比
[0025]
s82、对得到的3个信噪比值用三角插值方法,计算小数倍定时误差:
[0026]
s83、根据捕获到前导数据的起点位置l
acq
及初始定时误差
△nstep
,计算初始时偏估计值即:个样点。
[0027]
本发明的有益效果是:
[0028]
本发明可实现短波多载波信号可靠的时频同步捕获:基于前导序列,根据不同时偏频偏下的前导音snr作为捕获判断标准,捕获到多载波信号的同时也可以得到信号的起始位置以及整数倍频偏估计值;然后用功率最大的前导音进行小数倍频偏估计,在保证频偏估计精度的同时提高了频偏估计的范围;同时根据捕获到的信号起始位置进行初始时偏估计,联合多符号也提高了时间同步的性能;和传统的同步捕获方法相比,本发明在大频偏(例如频偏超过1倍子载波间隔)的短波信道环境中,不仅可显著提高系统的同步捕获概率,还可进行时频偏粗估计,同时也适用于非协作通信场景中;而且实现复杂度较低,鲁棒性好,对正确接收信号及后续的同步、解调等工作具有重要意义,具有很强的应用价值。
附图说明
[0029]
图1是具有前导序列的短波多载波信号消息格式示意图;
[0030]
图2是ard9900短波ofdm信号的消息格式示意图;
[0031]
图3是短波多载波信号的时频滑动捕获示意图;
[0032]
图4是本发明短波多载波信号的同步捕获方法工作总流程图;
[0033]
图5是初始频偏估计流程图;
[0034]
图6是初始时偏估计流程图;
[0035]
图7是本发明具体实施方法在短波不同信道下的捕获算法仿真性能图;
[0036]
图8是本发明具体实施方法在短波不同信道下的频偏粗估计仿真性能图;
[0037]
图9是本发明具体实施与传统同步捕获方法在短波恶劣信道下的捕获性能对比示意图。
具体实施方式
[0038]
下面结合实施例和附图,详细描述本发明的技术方案。
[0039]
以ard9900信号为例进行同步捕获;其前导段信号是dbpsk调制的ofdm信号,包含3个前导音,位置分别是0.5khz、1khz和1.5khz,幅度为数据帧信号的4倍,子载波间隔
△
f为62.5hz;其信号模型为:tc=1/f
t
为样点周期,其中f
t
=8khz为发端采样频率,ts=20ms为ofdm符号周期,g(t)为矩形成型脉冲,ofdm符号长度n
ofdm
为160个采样点;第k个ofdm符号时间取值范围t0+(k-1)(n
fft
+d)tc≤t≤t0+(n
fft
+d)ktc,c
k,n
为时域第k个ofdm符号的第n个样点:其中,a
k,l
为频域上第k个ofdm符号第l个子载波上的调制数据,l=0,1,
…
,n
fft-1;n(t)为加性高斯白噪声,则接收信号为:r(t)=s(t)+n(t),采样后的前导音数据在一个ofdm符号内可建模为一个正弦信号:其中,a、θ和f分别为当前前导音信号的幅度、初相和频率,fr为收端采样频率,为复高斯白噪声;本实施方式采用的同步捕获方法具体步骤为:
[0040]
s1、初始化参数:前导音的个数n
p
为3,最大子载波偏移量n
sc_ofst
为2,支持的频偏范围为[-2
△
f,2
△
f],捕获窗长n
acq
为10个ofdm符号长度(短波信道的多普勒典型值通常为1hz,对应的相干时间约423ms;捕获窗长的时间为200ms,小于相干时间的一半,所以可以认为此段时间内的信号较为平稳,受信道影响波动较小),滑动步长n
step
为16,故一个ofdm符号被分为了n
seg
=10个位置,每个位置对应一个时偏,捕获信号的信噪比门限g
t
为10,高snr相对于捕获信噪比门限的比例因子λh为0.8,高snr的符号个数相对于捕获窗长的比例因子为λf为0.75;
[0041]
s2、正整数i(i≤2n
sc_ofst
+1)取不同值对应频偏(i-n
sc_ofst-1)
△
f的情况下信号的前导音集合可以表示为:前导音及其左右各两个子载波对应的扩展集合可以表示为:定义接收滤波器通带内的全部频率集合为则噪声子载波集合可以用f
rx
减去得到(噪声子载波个数用n
noise
表示):
[0042]
s3、以步长n
step
为16,检测窗长n
fft
为128依次滑动接收的信号数据进行fft,得到频域数据:其中,w(l)为w(n)在频点l处的fft变换;计算并记录n
p
=3个前导音在不同滑动位置j(1≤j≤n
seg
)、不同频偏(i-n
sc_ofst-1)
△
f下的snr:其中,为当前滑动窗口的n
p
个前导音的平均功率,为当前窗口的噪声平均功率;
[0043]
s4、判断是否已处理n
acq
个符号,若是则计算当前捕获窗长内的其中其中为滑动位置j,频偏
(i-n
sc_ofst-1)
△
f情况下捕获窗长内的第k个符号的信噪比;否则,转s3;
[0044]
s5、找出snr
pilot
中的最大值snr
max
,判断snr
max
是否大于捕获门限g
t
=10且高snr snr
high
(snr
high
≥λ
hgt
)的个数n
high
是否大于λfn
acq
,若是,则捕获成功;否则,转s3;
[0045]
s6、snr
max
在snr
pilot
中的列jm对应的时偏粗估计值为(j
m-1)n
step
,行im对应的整数倍频偏估计值为(i
m-n
sc_ofst-1)
△
f;根据时偏粗估计值(j
m-1)n
step
和当前时域滑动窗位置l
win
(l
win
=n
slide-n
acqnseg-(mod(n
slide-1,n
seg
)+1))可以计算出捕获到前导数据的起点位置l
acq
,即l
acq
=(l
win
+j
m-1)n
step
;
[0046]
s7、根据功率最大前导音lm进行初始频偏估计;具体包括:
[0047]
s71、根据捕获到前导数据的起点位置l
acq
和整数倍频偏(i
m-n
sc_ofst-1)
△
f对n
p
个前导音分别求捕获窗长内n
acq
个符号的功率均值为捕获窗长内第k个符号频点l的频域信号;找到捕获窗长内功率均值中的最大值对应的前导音
[0048]
s72、取出具有最大功率的前导音lm及其左右共3个子载波的频域:v(lm)=ae
jθ
x(lm)+w(lm)(令),v(l
m-1)=ae
jθ
x(lm+1)+w(l
m-1),v(lm+1)=ae
jθ
x(l
m-1)+w(lm+1);
[0049]
s73、根据捕获窗长内每个符号取出的3个子载波的信号,利用频偏估计公式分别估计频偏其中表示取实部操作;
[0050]
s74、分别计算n
acq
个符号内lm的snr:表示第k个符号频点lm的信号功率,若则该符号的频偏估计值视为异常值;若频偏估计绝对值大于0.5也视为异常值;去除异常估计值;
[0051]
s75、对去除异常估计后的l
normal
(l
normal
≤l
acq
)个频偏估计值求平均,即得到小数频偏初始频偏估计值是小数频偏加上整数频偏的和,即
[0052]
s8、根据捕获到的信号起点位置l
acq
进行初始时偏估计,包括:
[0053]
s81、取出前导数据的起点位置l
acq
和整数倍频偏(i
m-n
sc_ofst-1)
△
f所对应的n
p
个前导音平均信噪比及其左右时偏对应的平均信噪比
[0054]
s82、对得到的3个信噪比值用三角插值方法,计算小数倍定时误差:
[0055]
s83、根据捕获到前导数据的起点位置l
acq
及初始定时误差
△nstep
,计算初始时偏估计值即:
[0056]
附图7是本发明具体实施方法在不同信道下的捕获算法仿真性能图;其中横坐标的snr为ard9900多载波信号完整帧在带宽2.1875khz的带内信噪比,纵坐标为捕获概率;捕获算法仿真参数设置见表1,仿真信道参数见表2。
[0057]
表1捕获算法仿真参数
[0058][0059][0060]
表2仿真信道参数表
[0061][0062]
对于仿真的三种信道,虚警概率都是小于1%。由于本发明所提的算法是基于前导音的信噪比在时频域同时进行捕获的,性能高效且稳健,故该算法的虚警概率很小。对于不同信道下的捕获概率在低信噪比下差异较大。
[0063]
在加性高斯白噪声(additive white gaussian noise,awgn)信道下,由于信号在全频带受到的是均匀的高斯白噪声影响,各前导音信道特性一致,所以捕获概率随着信噪比的增加而增长;当带内snr大于-1.5db时,捕获概率能够达到95%以上。
[0064]
在短波衰落信道下,由于前导音频点频率间隔大,超过了短波信道相干带宽,各前导音的衰落特性不一致,此时联合多符号时频滑动窗内的前导音功率均值具有频率分集的等增益合并增益,在低信噪比下(带内snr《-1.8db)短波衰落信道下的捕获性能优于高斯信
道。
[0065]
信道相干带宽的大小使得不同衰落信道下的捕获性能产生了差异,设多径相干系数为0.5,此时短波中等信道和短波恶劣信道的相干带宽分别为400hz与200hz,短波中等信道的相干带宽与前导音间隔500hz接近,此时前导音平均功率带内的等增益合并增益相比于短波恶劣信道低,并存在多个前导音同时衰落的可能性,因此短波恶劣信道下的同步捕获性能优于短波中等信道。
[0066]
短波衰落信道下,当带内snr《-1.8db时,功率的等增益合并增益大于衰落带来的影响,存在突发性的小概率成功捕获,此时短波衰落信道下的捕获性能优于高斯信道,短波中等信道捕获概率约为0.7,短波恶劣信道捕获概率约为0.9;当带内-1.8《snr《2db时,合并增益带来的突发性小概率成功捕获无法消除深衰落带来的功率损失,此时短波衰落信道下的捕获性能比高斯信道差,随着带内snr的提升,估计性能逐渐趋近于1;受突发深衰落的影响,当带内2《snr《5.2db时,仍然会出现小概率的捕获失败情况;当带内snr》5.2db时,ard9900多载波信号捕获算法能够在短波衰落信道中实现95%以上无差错捕获。
[0067]
附图8为本发明在不同信道下测试的频偏估计性能;其中,横坐标为带内信噪比,纵坐标为频偏估计nrmse,归一化标准是子载波间隔
△
f=62.5hz;仿真参数与附图7的仿真参数设置相同;在低信噪比下短波衰落信道的频偏估计性能优于awgn信道,原因见上文分析;在信噪比snr=-3db时,短波中等信道频偏估计nrmse为5.2
×
10-2
即频偏误差在3.2hz左右,短波恶劣信道频偏误差在3.6hz左右,awgn信道下频偏误差在4.9hz左右,即测试最低信噪比情况下频偏误差均不超过5hz;随着信噪比的增加,各信道下的频偏估计性能逐渐变好,但短波恶劣信道下起伏较大,这是由于在该信道下,信号信噪比起伏较大,发生深衰落的概率较高,导致频偏估计值不太稳定;在信噪比snr=10db时,awgn信道和短波中等信道情况下的频偏估计nrmse可达到1.6
×
10-2
水平即频偏误差在1hz左右,短波恶劣信道nrmse为2.8
×
10-2
水平即频偏误差在1.75hz左右;由此可见,本发明在同步捕获时进行的频偏粗估计结果的误差较小,性能优越,为之后的精同步奠定了很好的基础。
[0068]
附图9为本发明实施方式与传统基于时域滑动窗相关的捕获方法在短波恶劣信道下的捕获概率性能比较;其中,横坐标为带内信噪比,纵坐标为捕获概率,仿真参数与附图7的仿真参数设置相同,每次仿真的频偏为设定范围内的随机数,共分为三种情况:0.6
△
f≤ξ0≤0.8
△
f,1.2
△
f≤ξ0≤1.4
△
f和1.6
△
f≤ξ0≤1.8
△
f;仿真结果表明,在初始频偏0.6
△
f≤ξ0≤0.8
△
f时,当snr《4db时本发明所提算法的捕获概率性能与传统算法相比,约有2db的信噪比增益,当snr≥4db时本发明算法的捕获性能与传统方法相近,捕获概率都趋近于1;随着频偏增大,在初始频偏1.2
△
f≤ξ0≤1.4
△
f时,本发明算法明显优于传统算法,在捕获概率为90%时,与传统算法相比约有10db的信噪比增益;当频偏接近于两倍子载波间隔即1.6
△
f≤ξ0≤1.8
△
f时,两种算法之间的性能差异进一步拉大,在捕获概率为75%时,与传统算法相比约有12.5db的信噪比增益;由附图9及以上分析可看出本发明方法在大频偏情况下的突出优势——即使在大频偏下同步捕获性能也很鲁棒,与小频偏下的性能一致,而传统算法随着频偏增大捕获能力越来越差。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1