一种摄像机的认证方法及控制装置与流程
一种摄像机的认证方法及控制装置
1.本技术是分案申请,原申请的申请号是202080004480.2,原申请日是2020年4月14日,原申请的全部内容通过引用结合在本技术中。
技术领域
2.本技术涉及智能车或自动驾驶领域,特别涉及一种摄像机的认证方法及控制装置。
背景技术:
3.自动驾驶汽车是一种以毫米波雷达、激光雷达、摄像机等感知周围环境,并通过先进的计算机技术进行决策和控制,实现无人驾驶的智能汽车。自动驾驶汽车在不同方位往往安装有多个摄像机,摄像机在自动驾驶汽车上扮演着重要作用。摄像机把视频数据传输给车载控制装置,车载控制装置通过对视频数据进行分析,识别道路状况,并根据道路状况决定汽车应该如何行驶,然后发指令给转向装置、动力装置或其他装置执行相应行驶动作。摄像机输入的视频数据是车载控制装置决定如何行驶的依据,假如摄像机被恶意替换成一个携带恶意程序的摄像机,则恶意程序可以篡改视频数据和欺骗车载控制装置,甚至通过该摄像机入侵整个自动驾驶系统和远程遥控。所以摄像机安全是汽车安全的重要因素之一。
4.为此,如何提高摄像机的安全性,是一个亟待解决的问题。
技术实现要素:
5.本技术提供一种摄像机的认证方法及控制装置,用以提高摄像机的安全性。
6.第一方面,本技术提供一种摄像机的认证方法,所述方法包括:
7.获取待认证摄像机拍摄的一帧或多帧第一图像;根据所述一帧或多帧第一图像确定n个感光单元的光强度偏移值;确定所述n个感光单元的光强度偏移值与预设n维向量的匹配度;若所述匹配度符合预设条件,则确定所述待认证摄像机认证通过;其中,所述n个感光单元位于所述待认证摄像机的感光层中;所述感光层包括m个感光单元,n≤m。
8.基于上述方案,获取待认证摄像机拍摄的一帧或多帧第一图像,根据该一帧或多帧第一图像确定待认证摄像机的感光层中n个感光单元的光强度偏移值,基于待认证摄像机的所述n个感光单元的光强度偏移值和预设的n维向量,确定二者的匹配度,若匹配度符合预设条件,也即若二者匹配,则确定待认证摄像机认证通过,从而提高摄像机的安全性。该方案通过待认证摄像机的物理特性,也即将待认证摄像机的感光单元的光强度偏移值作为待认证指纹,根据待认证指纹对待认证摄像机进行身份认证。进一步的,无需在待认证摄像机中安装数字证书或者密钥,避免待认证摄像机中数字证书或者密钥泄露而影响认证安全性。而且提取待认证摄像机的图像,待认证摄像机除了提供固有的视频或者图像之外,无需提供其他认证信息,即无需对待认证摄像机进行预编程或者其它修改,节省开发成本。
9.在一种可能的实现方式中,可以是根据所述一帧或多帧第一图像确定所述m个感
光单元的光强度偏移值;将所述m个感光单元的光强度偏移值中最大的n个感光单元的光强度偏移值作为所述n个感光单元的光强度偏移值;或者,是从感光层的m个感光单元中确定出n个感光单元,具体的,所述n个感光单元为所述待认证摄像机的感光层中的n个预设位置上的感光单元,然后根据所述一帧或多帧第一图像和所述n个预设位置上的感光单元,确定所述n个感光单元的光强度偏移值。
10.基于上述方案,将m个感光单元的光强度偏移值中最大的n个感光单元的光强度偏移值作为n个感光单元的光强度偏移值,可以确定出整个感光层中光强度偏移值最大的n个感光单元,基于光强度偏移值最大的n个感光单元的光强度偏移值,在进行n个感光单元的光强度偏移值和预设n维向量的匹配时,可以较精确的确定出二者的匹配度。或者,从感光层的m个感光单元中确定出n个感光单元,确定所述n个感光单元的光强度偏移值,可以快速确定出n个感光单元的光强度偏移值,提高匹配速度。
11.在一种可能的实现方式中,针对所述多帧第一图像中的每帧,确定所述n个感光单元中的第k个感光单元在所述第一图像中的光强度偏移值,1≤k≤n;将所述第k个感光单元在每帧第一图像中的光强度偏移值的平均值确定为所述第k个感光单元的光强度偏移值。
12.基于上述方案,可以是获取待认证摄像机的一帧第一图像,将第k个感光单元在所述第一图像中的光强度偏移值确定为第k个感光单元的光强度偏移值;为了保证准确性,还可以获取待认证摄像机的多帧第一图像,确定第k个感光单元在每帧第一图像中的光强度偏移值,进而确定第k个感光单元在该多帧第一图像中的光强度偏移值的平均值,以作为第k个感光单元的光强度偏移值。
13.在一种可能的实现方式中,在确定第k个感光单元在每帧第一图像中的光强度偏移值时,可以是在所述第一图像中,基于第k个感光单元在所述第一图像中的光强度值和所述第k个感光单元的相邻感光单元在所述第一图像中的光强度值确定,具体的,第k个感光单元的相邻感光单元可以为一个,可以是将第k个感光单元在所述第一图像中的光强度值和一个相邻感光单元在所述第一图像中的光强度值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;或者,第k个感光单元的相邻感光单元可以为多个,可以是确定该多个相邻感光单元在第一图像中的光强度值的光强度平均值,然后确定第k个感光单元的光强度偏移值和光强度平均值的差值,作为第k个感光单元在所述第一图像中的光强度偏移值。其中,第k个感光单元的相邻感光单元可以是与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
14.基于上述方案,假设相邻的多个感光单元所对应的入射光相同,则相邻的多个感光单元的光强度值的差值可以作为待认证摄像机的待认证指纹,所以,针对任一帧第一图像中,基于第k个感光单元的光强度值和第k个感光单元的相邻感光单元的光强度值,确定第k个感光单元的光强度偏移值作为待认证摄像机的待认证指纹。进一步的,考虑到每个感光单元具有其对应的颜色,所以在确定第k个感光单元的光强度偏移值时,可以是将与第k个感光单元对应相同颜色的,且与第k个感光单元之间具有颜色对应预设距离的感光单元作为第k个感光单元的相邻感光单元。
15.在一种可能的实现方式中,根据预设摄像机拍摄的一帧或多帧第二图像确定n个感光单元的光强度偏移值,并将该n个感光单元的光强度偏移值作为预设n维向量,以用于对待认证摄像机的身份认证中。也就是说,如果待认证摄像机与预设摄像机是同一个摄像
机,则可以理解为,所述预设n维向量是根据所述待认证摄像机拍摄的一帧或多帧第二图像确定的n个感光单元的光强度偏移值。
16.在一种可能的实现方式中,n个感光单元的光强度偏移值与预设n维向量的匹配度可以是n个感光单元的光强度偏移值所组成的第一向量与预设n维向量的相似度。将n个感光单元的光强度偏移值按照预设顺序组成的第一向量,确定第一向量和预设n维向量之间的相似度,若相似度大于相似度阈值,则确定所述待认证摄像机认证通过;若相似度不大于相似度阈值,则确定所述待认证摄像机认证失败。
17.在一种可能的实现方式中,所述预设顺序是根据所述n个感光单元在所述待认证摄像机的感光层中的位置确定的。针对待认证摄像机的感光层中第x行,确定n个感光单元中位于第x行的感光单元,并根据确定出的感光单元从左到右的顺序,确定感光单元对应光强度偏移值的排序结果,其中,x大于等于1。根据确定第x行对应的光强度偏移值的排序结果的步骤,确定第x+1行、第x+2行、
……
、第x+n行分别对应的光强度偏移值的排序结果,直至将n个光强度偏移值排序完成。按照第x行、第x+1行、第x+2行
……
、第x+n行的顺序,将每行对应的光强度偏移值的排序结果拼接,以得到第一向量。
18.在一种可能的实现方式中,所述预设顺序是根据所述n个感光单元的光强度偏移值的大小确定的。将n个感光单元的光强度偏移值从大到小排序后作为第一向量。
19.第二方面,本技术提供一种控制装置,所述控制装置可以是车载控制装置,或者是用于车载控制装置的芯片。所述控制装置具有实现上述第一方面或第一方面任意所述的方法。该功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。该硬件或软件包括一个或多个与上述功能相对应的单元或模块。
20.在一种可能的实现方式中,所述控制装置包括:
21.获取模块和处理模块;
22.所述获取模块,用于获取待认证摄像机拍摄的一帧或多帧第一图像;
23.所述处理模块,用于根据所述一帧或多帧第一图像确定n个感光单元的光强度偏移值;所述n个感光单元位于所述待认证摄像机的感光层中;所述感光层包括m个感光单元,n≤m;
24.所述处理模块,还用于确定所述n个感光单元的光强度偏移值与预设n维向量的匹配度;若所述匹配度符合预设条件,则确定所述待认证摄像机认证通过。
25.在一种可能的实现方式中,所述处理模块具体用于:
26.根据所述一帧或多帧第一图像确定所述m个感光单元的光强度偏移值;将所述m个感光单元的光强度偏移值中最大的n个感光单元的光强度偏移值作为所述n个感光单元的光强度偏移值;
27.或者,
28.所述n个感光单元为所述待认证摄像机的感光层中的n个预设位置上的感光单元;
29.根据所述一帧或多帧第一图像和所述n个预设位置上的感光单元,确定所述n个感光单元的光强度偏移值。
30.在一种可能的实现方式中,所述处理模块具体用于:
31.针对所述多帧第一图像中的每帧,确定所述n个感光单元中的第k个感光单元在所述第一图像中的光强度偏移值,1≤k≤n;
32.将所述第k个感光单元在每帧第一图像中的光强度偏移值的平均值确定为所述第k个感光单元的光强度偏移值。
33.在一种可能的实现方式中,所述处理模块具体用于:
34.针对任一帧第一图像,将第k个感光单元在所述第一图像中的光强度值和一个相邻感光单元在所述第一图像中的光强度值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;
35.其中,所述相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
36.在一种可能的实现方式中,所述处理模块具体用于:
37.针对任一帧第一图像,确定多个相邻感光单元在所述第一图像中的光强度值的光强度平均值;
38.将第k个感光单元在所述第一图像中的光强度值和所述光强度平均值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;
39.其中,所述多个相邻感光单元中每个相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
40.在一种可能的实现方式中,所述预设n维向量是根据所述待认证摄像机拍摄的一帧或多帧第二图像确定的n个感光单元的光强度偏移值。
41.在一种可能的实现方式中,所述处理模块具体用于:
42.确定第一向量和所述预设n维向量的相似度;所述第一向量是由所述n个感光单元的光强度偏移值按照预设顺序组成;
43.若所述相似度大于相似度阈值,则确定所述待认证摄像机认证通过。
44.在一种可能的实现方式中,所述预设顺序是根据所述n个感光单元在所述待认证摄像机的感光层中的位置确定的;
45.或,所述预设顺序是根据所述n个感光单元的光强度偏移值的大小确定的。
46.关于第二方面或各种可能的实施方式的技术效果,可参考对于第一方面或相应的实施方式的技术效果的介绍。
47.第三方面,本技术提供一种控制装置,所述控制装置包括处理器,当所述处理器执行存储器中的计算机程序或指令时,如第一方面或第一方面任意所述的方法被执行。
48.第四方面,本技术提供一种控制装置,所述控制装置包括处理器和存储器,所述存储器用于存储计算机程序或指令;所述处理器用于执行所述存储器所存储的计算机程序或指令,以使所述控制装置执行如第一方面或第一方面任意所述的方法。
49.第五方面,本技术提供一种控制装置,所述控制装置包括处理器、存储器和通信接口,所述通信接口,用于接收信号或者发送信号;所述存储器,用于存储计算机程序或指令;所述处理器,用于从所述存储器调用所述计算机程序或指令执行如第一方面或第一方面任意所述的方法。
50.第六方面,本技术提供一种控制装置,所述控制装置包括处理器和接口电路,所述接口电路,用于接收代码指令并传输至所述处理器;所述处理器运行所述代码指令以执行如第一方面或第一方面任意所述的方法。
51.第七方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质用于
存储计算机程序或指令,当计算机读取并执行所述计算机程序或指令时,使得第一方面或第一方面任意所述的方法被实现。
52.第八方面,本技术提供一种包括指令的计算机程序产品,当计算机读取并执行所述计算机程序产品时,使得第一方面或第一方面任意所述的方法被实现。
53.第九方面,本技术提供一种芯片,包括处理器,所述处理器与存储器耦合,用于执行所述存储器中存储的计算机程序或指令,当所述处理器执行所述计算机程序或指令时,使得第一方面或第一方面任意所述的方法被实现。
54.第十方面,本技术提供一种芯片,所述芯片与存储器相连,用于读取并执行所述存储器中存储的软件程序,以实现上述第一方面或第一方面任意所述的方法。
附图说明
55.图1为适用于本技术实施例的一种网络架构示意图;
56.图2为本技术实施例提供的一种摄像机成像的流程示意图;
57.图3为本技术实施例提供的一种图像传感器的结构示意图;
58.图4为本技术实施例提供的另一种图像传感器的结构示意图;
59.图5为本技术实施例提供的一种滤光单元滤光的示意图;
60.图6为本技术实施例提供的一种车载控制装置接收到的各颜色光的分布示意图;
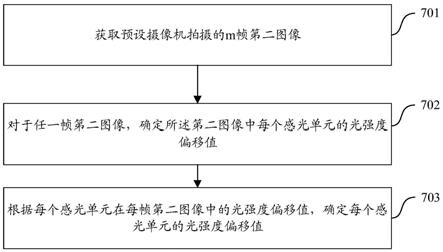
61.图7为本技术实施例提供的一种确定预设指纹的流程示意图;
62.图8为本技术实施例提供的一种摄像机的认证的流程示意图;
63.图9为本技术实施例提供的一种n个感光单元在感光层中位置分布的示意图;
64.图10为本技术实施例提供的一种确定光强度偏移值的流程示意图;
65.图11为本技术实施例提供的另一种摄像机的认证的流程示意图;
66.图12为本技术实施例提供的一种控制装置的结构示意图;
67.图13为本技术实施例提供的另一种控制装置的结构示意图。
具体实施方式
68.下面将结合附图对本技术实施例作进一步地详细描述。其中,在本技术实施例的描述中,除非另有说明,“/”表示或的意思,例如,a/b可以表示a或b;本文中的“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。
69.以下,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术实施例的描述中,除非另有说明,“多个”的含义是两个或两个以上。
70.在本技术实施例中,“示例性的”或者“例如”等词用于表示作例子、例证或说明。本技术实施例中被描述为“示例性的”或者“例如”的任何实施例或设计方案不应被解释为比其它实施例或设计方案更优选或更具优势。确切而言,使用“示例性的”或者“例如”等词旨在以具体方式呈现相关概念。
71.如图1所示,为本技术适用的一种可能的网络架构。该网络架构适用于自动驾驶汽
车中,可以包括车载控制装置和摄像机。摄像机可以有至少一个,可以分别安装在自动驾车汽车的前方、后方或者两侧,或者其他需要采集视频或图像数据的位置。
72.车载控制装置,例如车载控制器(on-board control center,occ),负责统一管理车辆的各项控制功能。或者,除了occ之外,车载控制装置也可以是其他的安装在车上的具有控制功能的装置。例如,如下介绍的各种终端设备,如果位于车辆上(例如放置在车辆内或安装在车辆内),都可以认为是车载控制装置。
73.终端设备,包括向用户提供语音和/或数据连通性的设备,例如可以包括具有无线连接功能的手持式设备、或连接到无线调制解调器的处理设备。该终端设备可以经无线接入网(radio access network,ran)与核心网进行通信,与ran交换语音和/或数据。该终端设备可以包括用户设备(user equipment,ue)、无线终端设备、移动终端设备、设备到设备通信(device-to-device,d2d)终端设备、v2x终端设备、机器到机器/机器类通信(machine-to-machine/machine-type communications,m2m/mtc)终端设备、物联网(internet of things,iot)终端设备、订户单元(subscriber unit)、订户站(subscriber station),移动站(mobile station)、远程站(remote station)、接入点(access point,ap)、远程终端(remote terminal)、接入终端(access terminal)、用户终端(user terminal)、用户代理(user agent)、或用户装备(user device)等。例如,可以包括移动电话(或称为“蜂窝”电话),具有移动终端设备的计算机,便携式、袖珍式、手持式、计算机内置的移动装置等。例如,个人通信业务(personal communication service,pcs)电话、无绳电话、会话发起协议(session initiation protocol,sip)话机、无线本地环路(wireless local loop,wll)站、个人数字助理(personal digital assistant,pda)、等设备。还包括受限设备,例如功耗较低的设备,或存储能力有限的设备,或计算能力有限的设备等。例如包括条码、射频识别(radio frequency identification,rfid)、传感器、全球定位系统(global positioning system,gps)、激光扫描器等信息传感设备。
74.摄像机作为辅助车辆自动驾驶的传感器,可以将其采集的视频或图像数据发送至车载控制装置,从而车载控制装置根据摄像机所采集的视频或图像数据对车辆自动驾驶行为决策。当然,自动驾驶汽车中还可以包括其他传感器,比如,毫米波雷达、激光雷达等,车载控制装置可以结合所有传感器所采集的数据决策,从而提高自动驾驶的安全性。
75.为保障摄像机采集数据的可靠性,车载控制装置需要对摄像机的身份进行验证。车载控制装置对摄像机进行身份验证的触发条件可以有多种。第一个示例中,车载控制装置基于预设时间对摄像机进行身份验证,比如,车载控制装置在每天的固定时刻对摄像机进行身份验证,又比如,车载控制装置每隔预设时段对摄像机进行身份验证。第二个示例中,车载控制装置基于预设事件对摄像机进行身份验证,比如,车载控制装置在确定自动驾驶汽车启动自动驾驶模式时,对摄像机进行身份验证,又比如,车载控制装置在接收到用户指令时对摄像机进行身份验证。当然,也可以是其他触发条件。
76.现有的身份认证方式中,车载控制装置主要采用证书或对称密钥的方式对摄像机进行认证,摄像机中需要部署证书或对称密钥,但目前的大部分摄像机不支持硬件安全模块,导致部署在摄像机中的证书或对称密钥很容易被提取,通过逆向工程,就可以找到证书或对称密钥,甚至认证算法。车载控制装置对摄像机进行身份认证存在不安全性。
77.基于上述问题,本技术实施例提供一种摄像机的认证方法,充分利用摄像机的物
理特性,实现对摄像机的身份认证,而无需在摄像机中部署证书或者密钥,提高车载控制装置对摄像机进行身份认证的安全性。
78.示例性的,先对摄像机的成像原理说明,如图2中,摄像机在拍摄一个物体时,可以通过摄像机镜头收集物体上反射的光,并将收集的光聚焦在图像传感器的受光面上,图像传感器将光信号转换为数字信号,再经信号处理系统处理和调整后,发送至记录媒介上进行记录,或者发送至监视器、显示器显示。
79.图像传感器为摄像机成像的关键部件,以互补金属氧化物半导体(complementary metal oxide semiconductor,cmos)图像传感器为例,其实质上是像素阵列,包括多个像素传感器,每个像素传感器可以将接收到的光信号转换为电信号,通过读出电路转为数字化信号,从而完成现实场景数字化的过程。如图3中,每个像素传感器的内部结构都是一样的,包括微透镜、滤光单元、光电信号转换器、读出电路。微透镜阵列具有球形表面和网状透镜,微透镜将照射过来的光收集起来并聚焦到滤光单元上。滤光单元可以有绿色(green,g)、红色(red,r)、蓝色(blue,b)或者无色(clear,c)等,不同颜色的滤光单元可以透过对应波长的光线。光电信号转换器可以将受光面感受到的光转换成电信号,并经读出电路读出。
80.如图4为本技术中提供的另一种图像传感器结构,该图像传感器中包括滤光层和感光层,滤光层为m个滤光单元组成的阵列,感光层为m个感光单元组成的阵列,滤光单元和感光单元是一一对应关系,此处的感光单元可以理解成如图3中的每个像素传感器中的光电信号转换器和读出电路的结合,其可以接收到滤光单元过滤后的光线,并将光信号转换成数字信号输出。换言之,滤光单元可以将入射光过滤后照射到对应的感光单元上,感光单元感应其所采集到的光的光强度值。实际应用中,绿色滤光单元只允许绿色光通过,红色滤光单元只允许红色光通过,蓝色滤光单元只允许蓝色光通过,无色滤光单元可以允许全色光(包括红光、绿光、蓝光)通过。感光单元可以感应其对应滤光单元过滤出的光的光强度值,比如,感光单元对应的滤光单元为绿色滤光单元,则感光单元可以感应其对应的绿色滤光单元过滤出的绿光的光强度值,再比如,感光单元对应的滤光单元为白色滤光单元,则感光单元可以感应其对应的白色滤光单元过滤出的白光的光强度值。
81.自动驾车汽车中,摄像机在拍摄图像时,会有入射光摄入摄像机,也即有入射光射入滤光层的各滤光单元,入射光经各滤光单元过滤后照射至各滤光单元对应的感光单元上,各感光单元感应其所采集到的光的光强度值,并将光强度值发送至车载控制装置,车载控制装置根据所有感光单元发送的光强度值,评估被每个感光单元对应的滤光单元过滤掉的其他颜色的光强度值,从而确定每个感光单元对应像素的颜色,以生成摄像机拍摄出的图像。以其中一个感光单元来说,该感光单元对应的滤光单元为绿色,感光单元可以感应其对应滤光单元过滤出的绿光的光强度值,车载控制装置在生成图像时,可以根据该感光单元感应的绿光的光强度值和该感光单元周边的感光单元感应的其它颜色光(红色、蓝色)的光强度值,评估入射光中被该感光单元所对应滤光单元过滤掉的其他颜色的光的光强度值,从而确定出该感光单元对应的红色、蓝色、绿色的光强度值,以生成该感光单元对应像素的颜色。车载控制装置在确定出所有像素的颜色之后,根据每个像素的颜色即生成摄像机所拍摄到的图像。
82.如图4示出的滤光层和感光层中,该滤光层中每四个滤光单元组成一个色彩单元,每个色彩单元的排列方式为rccb,相应的,当入射光照射到不同颜色的滤光单元上时,不同
颜色的滤光单元对应的感光单元可以感应不同颜色的光强度值,比如图5中,入射光照射到红色滤光单元,则感光单元感应到入射光中红光的光强度值;入射光照射到白色滤光单元,则感光单元感应到入射光的光强度值;入射光照射到蓝色滤光单元,则感光单元感应到入射光中蓝光的光强度值。车载控制装置收到的各感光单元发送的光强度值所属的颜色可以如图6所示,每个方格在图像中对应一个像素,车载控制装置根据如图6中每个单一颜色的光强度值,确定该单一颜色对应像素的其它颜色的光强度值,进而确定每个像素所呈现的颜色。
83.基于每个感光单元都具有其独有的光学敏感度,所以两个感光单元在感应到相同光强度值的光时,确定出的光强度值有可能不同,可以将两个感光单元确定出的光强度值的差值(也可以叫做光强度偏移值)视为是摄像机的指纹,以对摄像机的身份进行验证。
84.考虑到实际应用中,感光单元对应有滤光单元,具体可以是针对对应相同颜色滤光单元的感光单元确定光强度偏移值,以同样对应红色滤光单元的两个感光单元举例来说,若两个感光单元对应的红色滤光单元的入射光为相同光强度值的光,则可以计算两个感光单元感应的红光的光强度值的差值,以作为摄像机的指纹;再以同样对应白色滤光单元的两个感光单元举例来说,若两个感光单元对应的白色滤光单元的入射光为相同光强度值的光,则可以计算两个感光单元感应的白光的光强度值的差值,以作为摄像机的指纹。
85.需要说明的是,本技术实施例是基于相邻的多个感光单元所对应的入射光相同(也即相邻的多个感光单元所对应的滤光单元的入射光相同)这一假设实现的,在该假设条件下可以将相邻的多个感光单元之间的光强度值的差值作为摄像机的指纹。
86.本技术实施例中,车载控制装置确定预设摄像机中感光单元的光强度偏移值,预设摄像机理解为自动驾驶汽车的原装摄像机,或者是经厂商合法性验证通过的中间摄像机,车载控制装置将确定出的预设摄像机中感光单元的光强度偏移值存储起来,在车载控制装置对待认证摄像机进行身份认证时,可以是确定待认证摄像机的光强度偏移值,然后将待认证摄像机的光强度偏移值与预先存储的光强度偏移值作比较,以对待认证摄像机进行身份认证。预设摄像机中感光单元的光强度偏移值可以理解成预设摄像机的预设指纹,待认证摄像机的光强度偏移值可以理解成待认证摄像机的待认证指纹,具体认证时,可以是确定待认证指纹和预设指纹是否匹配,若确定待认证指纹和预设指纹匹配,则确定待认证摄像机就是预设摄像机,也即合法摄像机;若确定待认证指纹和预设指纹不匹配,则确定待认证摄像机不是预设摄像机,也即不合法摄像机。
87.下面,以车载控制装置获取待认证摄像机拍摄的第一图像,和获取预设摄像机拍摄的第二图像为例进行描述说明。
88.车载控制装置在从预设摄像机中提取预设指纹时,具体为根据预设摄像机拍摄的第二图像确定预设光强度偏移值。第一种实现方式中,车载控制装置获取预设摄像机拍摄的第二图像,并根据该预设摄像机拍摄的第二图像确定预设摄像机的感光层中每个感光单元的预设光强度偏移值,以得到m个感光单元的预设光强度偏移值,并将该m个感光单元的预设光强度偏移值组成预设摄像机的预设指纹。第二种实现方式中,车载控制装置获取预设摄像机拍摄的第二图像,并根据该预设摄像机拍摄的第二图像确定预设摄像机的感光层中n个感光单元的预设光强度偏移值,并将该n个感光单元的预设光强度偏移值组成预设摄像机的预设指纹,其中,n≤m。
89.对于第二种实现方式,车载控制装置可以基于预设规则确定n个感光单元的预设光强度偏移值。该预设规则可以有多种,可以是确定预设摄像机的感光层中预设位置上的n个感光单元的光强度偏移值,也可以是确定预设摄像机的感光层中所有光强度偏移值排序中预设位置上的n个光强度偏移值。
90.在第一种预设规则中,具体可以是预先设定位于感光层中预设位置上的n个感光单元为预设感光单元,进而确定预设感光单元对应的光强度偏移值为预设光强度偏移值。在确定n个预设光强度偏移值时,先确定感光层中预设位置上的n个预设感光单元,然后确定该n个预设感光单元中每个预设感光单元的光强度偏移值。
91.在第二种预设规则中,具体可以是确定m个感光单元的光强度偏移值排序中位于预设位置上的光强度偏移值为预设光强度偏移值。在确定n个预设光强度偏移值时,根据预设摄像机拍摄的第二图像,确定感光层中m个感光单元的光强度偏移值,然后可以将m个感光单元的光强度偏移值从大到小排序中位于预设位置上的n个光强度偏移值作为n个预设光强度偏移值。结合图4举例来说,该感光层中有36的感光单元,根据预设摄像机拍摄的第二图像,确定每个感光单元的光强度偏移值,然后从36个感光单元的光强度偏移值的从大到小排序中,确定出位于偶数位置的18个光强度偏移值为18个预设光强度偏移值。一种可选的实现方式中,还可以是确定m个感光单元的光强度偏移值中最大的n个光强度偏移值作为n个预设光强度偏移值。
92.本技术实施例中,车载控制装置在从预设摄像机中提取预设指纹时,可以是从预设摄像机拍摄的任一帧第二图像中提取,也可以是从预设摄像机拍摄的多帧第二图像中提取。在车载控制装置从预设摄像机拍摄的多帧第二图像中提取时,可以是针对每一帧第二图像,确定感光单元在该帧第二图像中的光强度偏移值,然后将感光单元在每帧第二图像中的光强度偏移值的平均值作为该感光单元的光强度偏移值。此处的感光单元可以是在第一预设规则中n个预设感光单元的任一个,或者是第二预设规则中m个感光单元中的任一个。
93.针对任一个需要确定光强度偏移值的感光单元,车载控制装置可以根据任一帧第二图像中该感光单元的光强度值和该感光单元的相邻感光单元的光强度值确定。考虑到感光单元感应的光颜色,可以是确定与该感光单元对应相同颜色的且位于该感光单元周边的感光单元作为其相邻感光单元。具体实现中,可以是设定感光单元的相邻感光单元与所述感光单元对应相同颜色且具有与所述颜色对应的预设距离,相当于,感光单元的周边单元若满足条件,则确定该周边单元为该感光单元的相邻感光单元,其中,该条件包括:与该感光单元对应相同颜色,且与该感光单元具有与颜色对应的预设距离。
94.一种实现方式中,可以从感光层中确定感光单元的一个相邻感光单元,并将感光单元的光强度值和该相邻感光单元的光强度值的差值作为该感光单元的光强度偏移值,此处,感光单元的相邻感光单元可以是该感光单元周边的符合上述条件中的任一个感光单元。比如图4中,某个感光单元的坐标为(x,y),若该感光单元对应红色,则其周边对应红色且在水平方向或竖直方向上与该感光单元之间具有预设距离2的感光单元可以有四个,坐标分别为(x+2,y)、(x,y+2)、(x-2,y)、(x,y-2),则可以取该四个感光单元中的任一个感光单元的光强度值与该感光单元的光强度值做差值。
95.另一种实现方式中,可以从感光层中确定感光单元的多个相邻感光单元,进而确
定该多个相邻感光单元的光强度值的平均值,也即光强度平均值,将该感光单元的光强度值和该多个相邻感光单元的光强度值平均值的差值,作为该感光单元的光强度偏移值,此处,该多个相邻感光单元中每个相邻感光单元都是该感光单元周边的与之相同颜色且具有与颜色对应的预设距离的多个感光单元。比如,图4中的某个感光单元的坐标为(x,y),若该感光单元对应红色,则其相邻感光单元可以有四个,坐标分别为(x+2,y)、(x,y+2)、(x-2,y)、(x,y-2),确定该四个相邻感光单元的光强度值的平均值,然后将该感光单元的光强度值与该平均值做差值。
96.本例子中,可以设定感光单元对应蓝色或红色时,感光单元与其相邻感光单元在水平方向或竖直方向上的预设距离为2,感光单元对应白色时,感光单元与其相邻感光单元在水平方向和竖直方向上的预设距离分别为1,当然,不同颜色对应的预设距离还可以是其他值,具体可以是根据经验或者需求确定,且不同颜色的感光单元对应的预设距离可以相同或者不同。此外,可以设定感光单元的相邻感光单元有4个,但还可以设定感光单元的相邻感光单元为其他数量,比如,2个、8个或者其他,且不同颜色的相邻感光单元的数量可以相同或者不同。
97.其他例子中,设定感光单元对应蓝色时,感光单元与其相邻感光单元在水平方向或竖直方向上的预设距离为4,相邻感光单元有4个;设定感光单元对应红色时,感光单元与其相邻感光单元在水平方向或竖直方向上的预设距离为2,相邻感光单元有4个;设定感光单元对应白色时,感光单元与其相邻感光单元在水平方向和竖直方向上的预设距离分别为1,以及在水平方向和竖直方向上的预设距离分别为2,相邻感光单元有8个。
98.车载控制装置在确定出任一帧第二图像中感光单元的光强度值和该感光单元的多个相邻感光单元的光强度值之后,可以是确定该多个相邻感光单元的光强度值的光强度平均值,然后将该感光单元的光强度值与光强度平均值的差值作为感光单元在该帧第二图像中的光强度偏移值。当然,还可以是确定多个相邻感光单元的光强度值中最大或最小的光强度值,并将该感光单元的光强度值和该确定出的最大或最小的光强度值的差值作为感光单元在该帧第二图像中的光强度偏移值。或者确定该多个相邻感光单元的光强度值中最大和最小的光强度值,并确定最大和最小的光强度值的平均值,然后将该感光单元的光强度值与该最大和最小的光强度值的平均值的差值作为感光单元在该帧第二图像中的光强度偏移值,等等。此处的差值可以是差值的绝对值,也可以不是差值的绝对值。
99.为了更好的解释本技术实施例中预设摄像机确定预设指纹的具体实现过程,下面结合图4,提供如图7所示的预设指纹提取流程,该流程由车载控制装置完成。
100.步骤701,获取预设摄像机拍摄的m帧第二图像;m大于等于1。
101.步骤702,对于任一帧第二图像,确定所述第二图像中每个感光单元的光强度偏移值。
102.以第i帧第二图像为例,针对感光单元分别对应白色、红色、蓝色时说明如下:
103.若感光单元对应白色,设感光单元在第i帧第二图像中的光强度值为p(x,y),感光单元的相邻感光单元在第i帧第二图像中的光强度值分别为p(x+1,y+1)、p(x-1,y-1)、p(x+1,y-1)、p(x-1,y+1),则可以根据公式(1)计算第i帧第二图像中该感光单元的光强度偏移值。
104.biasi(p(x,y))=p(x,y)-(p(x+1,y+1)+p(x-1,y-1)+p(x+1,y-1)+p(x-1,y+1))/4……
(1)
105.若感光单元对应红色,设感光单元在第i帧第二图像中的光强度值为p(x,y),感光单元的相邻感光单元在第i帧第二图像中的光强度值分别为p(x-2,y)、p(x,y-2)、p(x,y+2)、p(x+2,y),则可以根据如公式(2)计算第i帧第二图像中该感光单元的光强度偏移值。
106.biasi(p(x,y))=p(x,y)-(p(x-2,y)+p(x,y-2)+p(x,y+2)+p(x+2,y))/4
……
(2)
107.若感光单元对应蓝色,设感光单元在第i帧第二图像中的光强度值为p(x,y),感光单元的相邻感光单元在第i帧第二图像中的光强度值分别为p(x-2,y)、p(x,y-2)、p(x,y+2)、p(x+2,y),则可以根据公式(3)计算第i帧第二图像中该感光单元的光强度偏移值。
108.biasi(p(x,y))=p(x,y)-(p(x-2,y)+p(x,y-2)+p(x,y+2)+p(x+2,y))/4
……
(3)
109.步骤703,根据每个感光单元在每帧第二图像中的光强度偏移值,确定每个感光单元的光强度偏移值。
110.在确定每个感光单元在每帧第二图像中的光强度偏移值之后,也即得到每个感光单元分别在m帧第二图像中的光强度偏移值,然后根据公式(4),确定每个感光单元的光强度偏移值。
[0111][0112]
其中,bias(p(x,y))为预设摄像机中感光单元的光强度偏移值;biasi(p(x,y))为预设摄像机中感光单元在第i帧第二图像中的光强度偏移值。
[0113]
此外,也可以将每个感光单元分别在m帧第二图像中的光强度偏移值的求和作为每个感光单元的光强度偏移值,也即根据公式(5),确定每个感光单元的光强度偏移值。
[0114][0115]
本技术实施例中,考虑到在计算某个感光单元的光强度偏移值时,需要获取其相邻感光单元的光强度值,所以在预设摄像机的感光层中可能存在某些感光单元位于感光层边缘,从而不能较准确计算其光强度偏移值,所以可以将该位于感光层边缘的感光单元剔除掉。以如图4为例,可以将感光层的最上两行、最下两行、最左两列和最右两列中对应红色的感光单元和对应蓝色的感光单元,以及感光层的最上一行、最下一行、最左一列和最右一列中对应白色的感光单元剔除掉。
[0116]
上面已详细描述车载控制装置根据预设摄像机拍摄的第二图像确定n个预设光强度偏移值的实现方式,可以将该n个预设光强度偏移值按顺序存储在车载控制装置中,作为预设摄像机的预设指纹,相当于说,车载控制装置中存储有n个预设值,该n个预设值即用于对待认证摄像机的身份进行验证,该n个预设值可以以预设n维向量的方式存储。此处,由于车载控制装置中设置有硬件安全模块,可以将n个预设值存储在硬件安全模块中,保障存储的安全性。
[0117]
车载控制装置在对待认证摄像机进行身份认证时,可以参照如图8示出的一种对待认证摄像机进行身份认证的流程图,该流程可以由车载控制装置实现,具体如下:
[0118]
步骤801,获取待认证摄像机拍摄的一帧或多帧第一图像。
[0119]
步骤802,根据所述一帧或多帧第一图像确定n个感光单元的光强度偏移值。
[0120]
车载控制装置在从预设摄像机中提取预设指纹时,无论是确定m个感光单元的光强度偏移值为预设指纹,还是确定n个感光单元的光强度偏移值为预设指纹,相应的,车载控制装置在从待认证摄像机中提取待认证指纹时,也需要按照相同的方式提取。
[0121]
第一种实现方式中,车载控制装置在确定预设指纹时,可以根据该预设摄像机拍摄的第二图像确定预设摄像机的感光层中每个感光单元的光强度偏移值,并将该预设摄像机的感光层中m个感光单元的光强度偏移值组成预设摄像机的预设指纹;相应的,车载控制装置在确定待认证指纹时,可以根据该待认证摄像机拍摄的第一图像确定待认证摄像机的感光层中每个感光单元的光强度偏移值,并将该待认证摄像机的感光层中m个感光单元的光强度偏移值组成待认证摄像机的待认证指纹。
[0122]
此外,本技术提供短指纹提取的实现方式,以减少用于存储预设指纹的存储空间以及降低身份认证中的计算量,也即第二种实现方式中,车载控制装置在确定预设指纹时,根据预设规则和预设摄像机拍摄的第二图像,确定n个预设光强度偏移值,组成预设指纹,相应的,车载控制装置在确定待认证指纹时,根据相同的预设规则和待认证摄像机拍摄的第一图像,确定n个光强度偏移值,组成待认证指纹。
[0123]
在第二种实现方式中,可以是确定预设摄像机的感光层中m个感光单元的光强度偏移值中最大的n个光强度偏移值为n个预设光强度偏移值,以作为预设指纹;以及确定待认证摄像机的感光层中m个感光单元的光强度偏移值中最大的n个光强度偏移值,以作为待认证指纹。举例来说,确定预设摄像机中m个光强度偏移值,从中确定出n个最大的光强度偏移值分别为bias0(p(x1,y1))、bias0(p(x2,y2))、
……
、bias0(p(xn,yn)),以作为预设指纹,以及,确定待认证摄像机中m个光强度偏移值,从中确定出n个最大的光强度偏移值分别为bias(p(x1,y1))、bias(p(x2,y2))、
……
、bias(p(xn,yn)),以作为待认证指纹。
[0124]
此处,虽然在确定预设指纹和待认证指纹时,都是从m个感光单元的光强度偏移值中确定最大的n个,但是若待认证摄像机和预设摄像机是同一个摄像机,则预设指纹中n个预设光强度偏移值对应的n个感光单元的位置与待认证指纹中n个光强度偏移值对应的n个感光单元的位置相同;若待认证摄像机和预设摄像机不是同一个摄像机,则预设指纹中n个预设光强度偏移值对应的n个感光单元的位置与待认证指纹中n个光强度偏移值对应的n个感光单元的位置不同。通过该方式,进一步提高身份验证的准确性。
[0125]
在第二种实现方式中,还可以是确定预设摄像机的感光层中位于预设位置上的n个感光单元的光强度偏移值为n个预设光强度偏移值,以作为预设指纹;以及确定待认证摄像机的感光层中位于相同位置上的n个感光单元的n个光强度偏移值,以作为待认证指纹。
[0126]
举例来说,确定预设摄像机的感光层中位于(x1,y1)、(x2,y2)、
……
、(xn,yn)的n个感光单元的光强度偏移值为n个预设光强度偏移值,分别为bias0(p(x1,y1))、bias0(p(x2,y2))、
……
、bias0(p(xn,yn)),以作为预设指纹,以及,确定待认证摄像机的感光层中位于(x1,y1)、(x2,y2)、
……
、(xn,yn)上的n个感光单元的n个光强度偏移值,分别为bias(p(x1,y1))、bias(p(x2,y2))、
……
、bias(p(xn,yn)),以作为待认证指纹。通过该方式,车载控制装置无需确定预设摄像机的感光层中所有感光单元的光强度偏移值,且在对待认证摄像机进行每次身份认证时,也无需确定待认证摄像机的感光层中所有感光单元的光强度偏移值,减少了计算量。
[0127]
在第二种实现方式中,还可以是确定预设摄像机的感光层中所有感光单元的光强
度偏移值中最大的n个光强度偏移值为n个预设光强度偏移值,以作为预设指纹,同时,确定该n个预设光强度偏移值在预设摄像机的感光层中的位置,在对待认证摄像机进行身份验证时,根据上述位置确定待认证摄像机的感光层的n个光强度偏移值。比如,确定预设摄像机中m个光强度偏移值,从中确定出n个最大的光强度偏移值分别为bias0(p(x1,y1))、bias0(p(x2,y2))、
……
、bias0(p(xn,yn)),以作为预设指纹,且n个最大的光强度偏移值对应的n个位置为(x1,y1)、(x2,y2)、
……
、(xn,yn),则在对待认证摄像机进行身份验证时,可以直接确定位于(x1,y1)、(x2,y2)、
……
、(xn,yn)的n个感光单元的n个光强度偏移值,以作为待认证指纹。通过该方式,车载控制装置在对待认证摄像机进行每次身份认证时,无需确定待认证摄像机中所有感光单元的光强度偏移值,减少了计算量。
[0128]
本技术实施例可以大大减少预设指纹所占的存储空间,对于1208
×
1928分辨率的摄像机,其对应2329024个感光单元(1208
×
1928=2329024),假设每个色彩单元的排列方式为rccb,则除掉最上两行,最下两行,最左两列和最右两列,则还剩2316496个感光单元(1204
×
1924=2316496),若确定摄像机的2316496个光强度偏移值,则组成一个长度为2316496的预设向量;而若从该2316496个光强度偏移值中确定100个光强度偏移值,则组成一个长度为100的预设向量,该长度为100的预设向量所占的存储空间会远远小于长度为2316496的预设向量。
[0129]
本技术实施例中,可以确定100个预设光强度偏移值作为预设指纹,也可以确定50个预设光强度偏移值作为预设指纹,当然也可以是其他数量的预设光强度偏移值作为预设指纹,相应的,从待认证摄像机拍摄的第一图像中确定相同数量的光强度偏移值作为待认证指纹。n的具体取值可以根据经验或者实际需求确定,在此不再限定。
[0130]
步骤803,确定所述n个感光单元的光强度偏移值与预设n维向量的匹配度;若所述匹配度符合预设条件,则确定所述待认证摄像机认证通过。
[0131]
车载控制装置在确定出待认证指纹之后,则将待认证指纹和预设指纹进行匹配,得到待认证指纹和预设指纹的匹配度,若匹配度符合预设条件,则确定所述待认证摄像机认证通过,若匹配度不符合预设条件,则确定所述待认证摄像机认证失败。
[0132]
具体的,可以是确定待认证摄像机的n个光强度偏移值组成的第一向量和预设n维向量之间的相似度,若相似度大于相似度阈值,则确定待认证摄像机认证通过,若相似度不大于相似度阈值,则确定待认证摄像机认证失败。
[0133]
此处,在将待认证摄像机的n个光强度偏移值组成第一向量时,可以是将n个光强度偏移值按照预设顺序组成。
[0134]
实现方式1中,可以是将n个光强度偏移值按照对应的n个感光单元在待认证摄像机的感光层中的位置组成第一向量。示例性的,针对待认证摄像机的感光层中第x行,确定n个感光单元中位于第x行的感光单元,并根据确定出的感光单元从左到右的顺序,确定感光单元对应光强度偏移值的排序结果,其中,x大于等于1。根据确定第x行对应的光强度偏移值的排序结果的步骤,确定第x+1行、第x+2行、
……
、第x+n行分别对应的光强度偏移值的排序结果,直至将n个光强度偏移值排序完成。按照第x行、第x+1行、第x+2行
……
、第x+n行的顺序,将每行对应的光强度偏移值的排序结果拼接,以得到第一向量。
[0135]
如图9为本技术实施例确定出n个感光单元在待认证摄像机的感光层中的位置分布的示意图,其中,n=7,7个感光单元分别为感光单元1至感光单元7,感光单元1至感光单
元7对应的光强度偏移值分别为bias1至bias7。针对待认证摄像机的感光层中第2行,确定第2行对应的光强度偏移值的排序结果为bias1、bias2;针对待认证摄像机的感光层中第4行,确定第4行对应的光强度偏移值的排序结果为bias7、bias4、bias6;针对待认证摄像机的感光层中第5行,确定第5行对应的光强度偏移值的排序结果为bias3、bias5;然后将每行对应的光强度偏移值的排序结果,按照从上到下的顺序依次拼接,以得到第一向量为(bias1、bias2、bias7、bias4、bias6、bias3、bias5)。
[0136]
需要说明的是,实现方式1中虽然是先确定每行对应的光强度偏移值的排序结果,然后将每行对应的光强度偏移值的排序结果按照从上到下的顺序依次拼接,以得到第一向量。但还可以是,先确定每列对应的光强度偏移值的排序结果,然后将每列对应的光强度偏移值的排序结果按照从左到右的顺序依次拼接,以得到第一向量。
[0137]
实现方式2中,可以将n个光强度偏移值按照大小顺序组成第一向量。示例性的,将n个感光单元的光强度偏移值从大到小排序后作为第一向量。仍以如图9为例,假设7个感光单元的光强度偏移值从大到小的依次为bias1、bias5、bias7、bias3、bias6、bias4、bias2,则得到第一向量为(bias1、bias5、bias7、bias3、bias6、bias4、bias2)。
[0138]
第一向量和预设n维向量之间的相似度,可以通过计算余弦相似度(cosine)、欧氏距离(euclidean distance)、曼哈顿距离(manhattan distance)等方式确定。
[0139]
示例性的,计算第一向量和预设n维向量的余弦相似度,设第一向量为a=[a1,a2,a3,
…
],其中,a1=bias(p(x1,y1)),a2=bias(p(x2,y2)),
…
,an=bias(p(xn,yn));设预设n维向量为b=[b1,b2,b3…
],其中b1=bias0(p(x1,y1)),b2=bias0(p(x2,y2)),
…
,bn=biasn(p(xn,yn));根据公式(6),计算第一向量和预设n维向量的余弦相似度。
[0140][0141]
若第一向量和预设n维向量的余弦相似度大于相似度阈值,则确定该n个光强度偏移值和预设n个光强度偏移值匹配,也即确定待认证摄像机认证通过;若第一向量和预设n维向量的余弦相似度不大于相似度阈值,则确定该n个光强度偏移值和预设n个光强度偏移值不匹配,也即确定待认证摄像机认证失败。
[0142]
车载控制装置在确定待认证摄像机认证通过,即确定待认证摄像机为合法摄像机时,可以接收该合法摄像机拍摄的视频或者图像,进而根据该合法摄像机拍摄的视频或者图像进行行驶决策;车载控制装置在确定待认证摄像机认证失败,即确定待认证摄像机为不合法摄像机时,可以采取相应的控制措施,比如拒绝通信,拒绝接收不合法摄像机拍摄的视频或者图像,从而避免不合法摄像机的恶意欺骗。
[0143]
本技术实施例中,车载控制装置可以是根据一帧或多帧第一图像确定n个感光单元的光强度偏移值,具体的如图10示出的流程。
[0144]
步骤1001,针对所述多帧第一图像中的每帧,确定所述n个感光单元中的第k个感光单元在所述第一图像中的光强度偏移值。
[0145]
在确定第k个感光单元在所述第一图像中的光强度偏移值时,可以是根据第k个感光单元在所述第一图像中的光强度值和第k个感光单元的一个或多个相邻感光单元在所述第一图像中的光强度值确定。
[0146]
一种可选方式中,将第k个感光单元在所述第一图像中的光强度值和一个相邻感光单元在所述第一图像中的光强度值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;其中,所述相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
[0147]
另一种可选方式中,确定多个相邻感光单元在所述第一图像中的光强度值的光强度平均值;将第k个感光单元在所述第一图像中的光强度值和所述光强度平均值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;其中,所述多个相邻感光单元中每个相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
[0148]
上述确定感光单元在第一图像中的光强度偏移值的实现方式,具体可参照确定感光单元在第二图像中的光强度偏移值的实现方式。
[0149]
步骤1002,将所述第k个感光单元在每帧第一图像中的光强度偏移值的平均值确定为所述第k个感光单元的光强度偏移值。
[0150]
如图11为本技术实施例提供的一种车载控制装置和待认证摄像机的交互流程图,该交互流程中的具体实现方式已在其他实施例中具体说明,不再赘述。
[0151]
步骤1101,待认证摄像机确定多帧第一图像;
[0152]
步骤1102,待认证摄像机将多帧第一图像发送至车载控制装置;
[0153]
步骤1103,车载控制装置根据多帧第一图像,确定待认证摄像机的n个感光单元的光强度偏移值;
[0154]
步骤1104,车载控制装置确定n个感光单元的光强度偏移值和预设n维向量的匹配度;
[0155]
步骤1105,车载控制装置若确定匹配度符合预设条件,则确定待认证摄像机认证通过;若确定匹配度不符合预设条件,则确定待认证摄像机认证失败。
[0156]
本技术实施例中,在对待认证摄像机进行身份认证时,可以将待认证摄像机的待认证指纹存储,并将存储的待认证指纹作为训练数据进行模型训练,以对预设指纹进行更新。
[0157]
一种实现方式中,待认证摄像机可以将拍摄图像中各感光单元的光强度值发送至车载控制装置,从而车载控制装置根据各感光单元的光强度值确定各感光单元的光强度偏移值,作为待认证摄像机的待认证指纹;另一种实现方式中,待认证摄像机可以将拍摄的图像发送至车载控制装置,车载控制装置提取图像中各感光单元的光强度值,进而确定各感光单元的光强度偏移值,作为待认证摄像机的待认证指纹。
[0158]
为了更好的说明本技术实施例中采用指纹匹配方式对待认证摄像机进行验证的准确性,可以根据如下的实验数据进一步说明。
[0159]
第一个实验中,有四个摄像机,分别从每个摄像机拍摄的50帧图像中提取10个感光单元的光强度偏移值作为指纹,并针对四个摄像机中的任意两个,确定二者指纹的相似度,得到的结果如表1中,当第一个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.641;当第二个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.643;当第三个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配
时,相似度为0.592;当第四个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.635。由此可知,两个相同摄像机的指纹的相似度较大,两个不同摄像机的指纹的相似度均趋近于0或为0。
[0160]
表1
[0161] 第一个摄像机第二个摄像机第三个摄像机第四个摄像机第一个摄像机0.6410.0000.0000.000第二个摄像机0.0000.6430.0000.000第三个摄像机0.0000.0000.5920.000第四个摄像机0.0000.0000.0000.635
[0162]
第二个实验中,有四个摄像机,分别从每个摄像机拍摄的250至500帧图像中提取10个感光单元的光强度偏移值作为指纹,并针对四个摄像机中的任意两个,确定二者指纹的相似度,得到的结果如表2中,当第一个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.970;当第二个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.946;当第三个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.964;当第四个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.954。由此可知,两个相同摄像机的指纹的相似度较大,两个不同摄像机的指纹的相似度均趋近于0或为0。
[0163]
表2
[0164] 第一个摄像机第二个摄像机第三个摄像机第四个摄像机第一个摄像机0.9700.0000.0000.000第二个摄像机0.0000.9460.0000.000第三个摄像机0.0000.0000.9640.000第四个摄像机0.0000.0000.0000.954
[0165]
第三个实验中,有四个摄像机,分别从每个摄像机拍摄的50帧图像中提取100个感光单元的光强度偏移值作为指纹,并针对四个摄像机中的任意两个,确定二者指纹的相似度,得到的结果如表3中,当第一个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均趋近于0或为0,而与自己的指纹进行匹配时,相似度为0.604;当第二个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.237;当第三个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.563;当第四个摄像机的指纹与其它摄像机的指纹进行匹配时,相似度均为0,而与自己的指纹进行匹配时,相似度为0.182。由此可知,两个相同摄像机的指纹的相似度较大,两个不同摄像机的指纹的相似度均趋近于0或为0。
[0166]
表3
[0167]
[0168][0169]
本技术实施例中,获取待认证摄像机拍摄的一帧或多帧第一图像,根据该一帧或多帧第一图像确定待认证摄像机的感光层中n个感光单元的光强度偏移值,基于待认证摄像机的所述n个感光单元的光强度偏移值和预设的n维向量,确定二者的匹配度,若匹配度符合预设条件,也即若二者匹配,则确定待认证摄像机认证通过,从而提高摄像机的安全性。该方案通过待认证摄像机的物理特性,也即将待认证摄像机的感光单元的光强度偏移值作为待认证指纹,根据待认证指纹对待认证摄像机进行身份认证。进一步的,无需在待认证摄像机中安装数字证书或者密钥,避免待认证摄像机中数字证书或者密钥泄露而影响认证安全性。而且提取待认证摄像机的图像,待认证摄像机除了提供固有的视频或者图像之外,无需提供其他认证信息,即无需对待认证摄像机进行预编程或者其它修改,节省开发成本。
[0170]
本文中描述的各个实施例可以为独立的方案,也可以根据内在逻辑进行组合,这些方案都落入本技术的保护范围中。
[0171]
可以理解的是,上述各个方法实施例中,由车载控制装置实现的方法和操作,也可以由可用于车载控制装置的部件(例如芯片或者电路)实现。
[0172]
上述本技术提供的实施例中,分别从各个设备之间交互的角度对本技术实施例提供的方法进行了介绍。为了实现上述本技术实施例提供的方法中的各功能,车载控制装置可以包括硬件结构和/或软件模块,以硬件结构、软件模块、或硬件结构加软件模块的形式来实现上述各功能。上述各功能中的某个功能以硬件结构、软件模块、还是硬件结构加软件模块的方式来执行,取决于技术方案的特定应用和设计约束条件。
[0173]
本技术实施例中对模块的划分是示意性的,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式。另外,在本技术各个实施例中的各功能模块可以集成在一个处理器中,也可以是单独物理存在,也可以两个或两个以上模块集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。
[0174]
结合图12、图13详细说明本技术实施例提供的控制装置。应理解,装置实施例的描述与方法实施例的描述相互对应,因此,未详细描述的内容可以参见上文方法实施例,为了简洁,这里不再赘述。
[0175]
如图12所示,本技术实施例还提供一种控制装置用于实现上述方法中车载控制装置的功能,该装置可适用于图7、图8、图10、图11所示出的流程图中,执行上述方法实施例的功能。例如,该装置可以为软件模块或者芯片系统。本技术实施例中,芯片系统可以由芯片构成,也可以包含芯片和其他分立器件。
[0176]
在一种可能的实现方式中,所述控制装置包括:
[0177]
获取模块1201和处理模块1202;
[0178]
所述获取模块1201,用于获取待认证摄像机拍摄的一帧或多帧第一图像;
[0179]
所述处理模块1202,用于根据所述一帧或多帧第一图像确定n个感光单元的光强度偏移值;所述n个感光单元位于所述待认证摄像机的感光层中;所述感光层包括m个感光单元,n≤m;
[0180]
所述处理模块1202,还用于确定所述n个感光单元的光强度偏移值与预设n维向量
的匹配度;若所述匹配度符合预设条件,则确定所述待认证摄像机认证通过。
[0181]
在一种可能的实现方式中,所述处理模块1202具体用于:
[0182]
根据所述一帧或多帧第一图像确定所述m个感光单元的光强度偏移值;将所述m个感光单元的光强度偏移值中最大的n个感光单元的光强度偏移值作为所述n个感光单元的光强度偏移值;
[0183]
或者,
[0184]
所述n个感光单元为所述待认证摄像机的感光层中的n个预设位置上的感光单元;
[0185]
根据所述一帧或多帧第一图像和所述n个预设位置上的感光单元,确定所述n个感光单元的光强度偏移值。
[0186]
在一种可能的实现方式中,所述处理模块1202具体用于:
[0187]
针对所述多帧第一图像中的每帧,确定所述n个感光单元中的第k个感光单元在所述第一图像中的光强度偏移值,1≤k≤n;
[0188]
将所述第k个感光单元在每帧第一图像中的光强度偏移值的平均值确定为所述第k个感光单元的光强度偏移值。
[0189]
在一种可能的实现方式中,所述处理模块1202具体用于:
[0190]
针对任一帧第一图像,将第k个感光单元在所述第一图像中的光强度值和一个相邻感光单元在所述第一图像中的光强度值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;
[0191]
其中,所述相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
[0192]
在一种可能的实现方式中,所述处理模块1202具体用于:
[0193]
针对任一帧第一图像,确定多个相邻感光单元在所述第一图像中的光强度值的光强度平均值;
[0194]
将第k个感光单元在所述第一图像中的光强度值和所述光强度平均值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;
[0195]
其中,所述多个相邻感光单元中每个相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
[0196]
在一种可能的实现方式中,所述预设n维向量是根据所述待认证摄像机拍摄的一帧或多帧第二图像确定的n个感光单元的光强度偏移值。
[0197]
在一种可能的实现方式中,所述处理模块1202具体用于:
[0198]
确定第一向量和所述预设n维向量的相似度;所述第一向量是由所述n个感光单元的光强度偏移值按照预设顺序组成;
[0199]
若所述相似度大于相似度阈值,则确定所述待认证摄像机认证通过。
[0200]
在一种可能的实现方式中,所述预设顺序是根据所述n个感光单元在所述待认证摄像机的感光层中的位置确定的;
[0201]
或,所述预设顺序是根据所述n个感光单元的光强度偏移值的大小确定的。
[0202]
如图13所示为本技术实施例提供的另一种控制装置,图13所示的装置1300可以为图12所示的装置的一种硬件电路的实现方式。该装置1300可适用于图7、图8、图10、图11所示出的流程图中,执行上述方法实施例的功能。为了便于说明,图13仅示出了该装置1300的
主要部件。
[0203]
图13所示的装置1300包括至少一个处理器1320,用于实现本技术实施例提供的图7、图8、图10、图11中任一方法。
[0204]
所述装置还可以包括至少一个存储器1330,用于存储程序指令和/或数据。存储器1330和处理器1320耦合。本技术实施例中的耦合是装置、单元或模块之间的间接耦合或通信连接,可以是电性,机械或其它的形式,用于装置、单元或模块之间的信息交互。处理器1320可能和存储器1330协同操作。处理器1320可能执行存储器1330中存储的程序指令。所述至少一个存储器中的至少一个可以包括于处理器中。
[0205]
应注意,本技术实施例中的处理器可以是一种集成电路芯片,具有信号的处理能力。
[0206]
在实现过程中,上述方法实施例的各步骤可以通过处理器中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器可以是通用处理器、数字信号处理电路(digitalsignalprocessor,dsp)、专用集成芯片(applicationspecificintegratedcircuit,asic)、现场可编程门阵列(fieldprogrammablegatearray,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
[0207]
可以理解,本技术实施例中的存储器可以是易失性存储器或非易失性存储器,或可包括易失性和非易失性存储器两者。应注意,本文描述的系统和方法的存储器旨在包括但不限于这些和任意其它适合类型的存储器。
[0208]
装置1300还可以包括通信接口1310,用于通过传输介质和其它设备进行通信,从而用于装置1300中的装置可以和其它设备进行通信。在本技术实施例中,通信接口1310可以是收发器、电路、总线、模块或其它类型的通信接口1310。在本技术实施例中,通信接口1310为收发器时,收发器可以包括独立的接收器、独立的发射器;也可以集成收发功能的收发器、或者是接口电路。
[0209]
装置1300还可以包括通信线路1340。其中,通信接口1310、处理器1320以及存储器1330可以通过通信线路1340相互连接;通信线路1340可以是外设部件互连标准(peripheral component interconnect,简称pci)总线或扩展工业标准结构(extended industry standard architecture,简称eisa)总线等。所述通信线路1340可以分为地址总线、数据总线、控制总线等。为便于表示,图13中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
[0210]
示例性地,当该装置1300实现图8所示的流程中车载控制装置的功能时:
[0211]
通信接口1310用于获取待认证摄像机拍摄的一帧或多帧第一图像;
[0212]
处理器1320用于根据所述一帧或多帧第一图像确定n个感光单元的光强度偏移值;
[0213]
处理器1320还用于确定所述n个感光单元的光强度偏移值与预设n维向量的匹配度;若所述匹配度符合预设条件,则确定所述待认证摄像机认证通过;
[0214]
存储器1330用于存储所述预设n维向量。
[0215]
在一种可能的实现方式中,所述处理器1320,用于根据所述一帧或多帧第一图像确定所述m个感光单元的光强度偏移值;将所述m个感光单元的光强度偏移值中最大的n个感光单元的光强度偏移值作为所述n个感光单元的光强度偏移值;
[0216]
或者,
[0217]
所述n个感光单元为所述待认证摄像机的感光层中的n个预设位置上的感光单元;
[0218]
所述处理器1320用于根据所述一帧或多帧第一图像和所述n个预设位置上的感光单元,确定所述n个感光单元的光强度偏移值。
[0219]
在一种可能的实现方式中,所述处理器1320,用于针对所述多帧第一图像中的每帧,确定所述n个感光单元中的第k个感光单元在所述第一图像中的光强度偏移值,1≤k≤n;
[0220]
将所述第k个感光单元在每帧第一图像中的光强度偏移值的平均值确定为所述第k个感光单元的光强度偏移值。
[0221]
在一种可能的实现方式中,所述处理器1320用于,针对任一帧第一图像,将第k个感光单元在所述第一图像中的光强度值和一个相邻感光单元在所述第一图像中的光强度值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;
[0222]
其中,所述相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
[0223]
在一种可能的实现方式中,所述处理器1320,用于针对任一帧第一图像,确定多个相邻感光单元在所述第一图像中的光强度值的光强度平均值;
[0224]
将第k个感光单元在所述第一图像中的光强度值和所述光强度平均值的差值确定为所述第k个感光单元在所述第一图像中的光强度偏移值;
[0225]
其中,所述多个相邻感光单元中每个相邻感光单元与所述第k个感光单元对应相同颜色且具有与所述颜色对应的预设距离。
[0226]
在一种可能的实现方式中,所述预设n维向量是根据所述待认证摄像机拍摄的一帧或多帧第二图像确定的n个感光单元的光强度偏移值。
[0227]
在一种可能的实现方式中,所述处理器1320,用于确定第一向量和所述预设n维向量的相似度;所述第一向量是由所述n个感光单元的光强度偏移值按照预设顺序组成;
[0228]
若所述相似度大于相似度阈值,则确定所述待认证摄像机认证通过。
[0229]
在一种可能的实现方式中,所述预设顺序是根据所述n个感光单元在所述待认证摄像机的感光层中的位置确定的;
[0230]
或,所述预设顺序是根据所述n个感光单元的光强度偏移值的大小确定的。
[0231]
该功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。该硬件或软件包括一个或多个与上述功能相对应的模块。
[0232]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、光学存储器等)上实施的计算机程序产品的形式。
[0233]
本技术是参照根据本技术的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个
机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0234]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0235]
显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1