一种环境自适应的高精度光载时频传递装置的制作方法
1.本发明涉及到高精度技术领域,特别涉及一种环境自适应的高精度光载时频传递装置。
背景技术:
2.高精度和高稳定度的时间频率基准在航天测控、导航、通信、分布式雷达、天文观测等领域均有着重要的应用。高精度科学计量推动着时间和频率基准的稳定性不断提升,如光钟的稳定性已达到了10-19
量级,为了实现对高性能时频基准的远距离分发,对传输链路中信号传输稳定性提出了更高的要求。传统微波链路由于精度较低,易受大气抖动、卫星轨道漂移等随机因素的干扰难以满足新型高精度时频基准的传递分发需求。鉴于光纤具有大带宽、低损耗、抗电磁干扰能力强等本征特性,高精度光载时频传递技术作为一项新兴技术受到广泛关注。
3.由于光载时频基准传输的介质为光纤,外界环境如缓变或突变的温度和振动都将不可避免地对传输光信号引入相位抖动噪声,为保证远端接收信号的稳定度,需要对环境导致的相位噪声进行实时精密的补偿消除。当前光载时频稳相传输的主要技术方案主要分为两类:1)基于相位共轭的被动稳相传输,通过借助于光学或电学分频、倍频和混频技术生成相位共轭的补偿信号,抵消传输链路中的相位抖动,系统常采用无源器件,不会引入额外的噪声,具有结构简单,易于实现等优势,但是稳相精度不够高、噪声补偿范围受限;2)基于反馈鉴相的主动控制稳相传输,通过光(电)锁相环、光(电)延迟线、压控振荡器等实现发射端与接收端反馈鉴相,并提取出链路的抖动误差信息,利用锁相环修正补偿传输链路引入的相位噪声,主动控制具有较高的补偿精度和大动态的补偿范围,广泛受到内外研究学者的青睐。
4.但是,在实际的工程应用中,光纤传输链路时常受到大温差变化和瞬态剧烈振动的环境影响,传统pid反馈控制器算法简单,缺乏自适应能力,超出量程后难以再次锁定。
技术实现要素:
5.有鉴于此,本发明提出了一种基于单神经元pid控制器的高精度光载时频传输装置,其有效地提升了当前光载时频传输系统环境自适应的能力,并且能够提升传输稳定度。
6.为了实现上述目的,本发明所采取的技术方案为:
7.一种环境自适应的高精度光载时频传输装置,包括发送端、传输链路、接收端和测试端。
8.所述的发送端由第一激光器单元、第一马赫曾德调制器单元、第一光纤分束器单元、第一环形器单元、第一光电探测器单元、第二光电探测器单元、第一功率分配器单元、第一移相器单元、第一带通滤波器单元、第二带通滤波器单元、第一放大器单元、第二放大器单元、第一2倍频单元、第一低通滤波器单元、第一单神经元pid控制器单元、第一混频器单元、第四带通滤波器单元、第一鉴相器单元组成。
9.所述的第一激光器单元输出端口与所述的第一马赫曾德调制器单元输入端口相连,所述第一马赫曾德调制器单元输出端口与所述第一光纤分束器单元输入端口相连,所述第一光纤分束器输出端口分为两路,第一输出端口与所述第一环形器单元第一输入端口相连,第二输出端口与所述第一光电探测器单元输入端口相连,所述第一光电探测器单元输出端口与所述第一带通滤波器单元输入端口相连,所述第一带通滤波器单元输出端口与所述第一放大器单元输入端口相连,所述第一放大器单元输出端口与所述第一混频器单元第一输入端口相连,所述第一环形器单元第二输出端口与所述第二光电探测器单元输入端口相连,所述第二光电探测器单元与所述第二带通滤波器单元输入端口相连,所述第二带通滤波器单元输出端口与所述第二放大器单元输入端口相连,所述第二放大器单元输出端口与所述第一混频器单元第二输入端口相连,所述第一混频器单元将两路输入信号进行混频后,所述第一混频器单元输出端口与所述第四带通滤波器单元输入端口相连,所述第四带通滤波器单元输出端口与所述第一鉴相器单元第二输入端口相连,所述第一功率分配器单元将输入频率信号分为三路,所述第一功率分配器单元第一输出端口与所述第一移相器单元输入端口相连,所述第一移相器单元输出端口与所述第一马赫曾德调制器单元调制端口相连,所述第一功率分配器单元第二输出端口与所述第一2倍频单元输入端口相连,所述第一2倍频单元输出端口与所述第一鉴相器单元第一输入端口相连,所述第一鉴相器单元将两路输入信号进行混频鉴相,所述第一鉴相器单元输出端口与所述第一低通滤波器单元输入端口相连,所述第一低通滤波器单元输出端口与所述第一单神经元pid控制器单元输入端口相连,所述第一单神经元pid控制器单元输出端口与所述第一移相器单元控制端口相连。
10.所述的接收端由第二光纤分束器单元、第三光电探测器单元、第一光纤反射镜单元、第三带通滤波器单元、第三放大器单元、第二功率分配器单元组成。
11.所述第二光纤分束器单元第二输出端口与所述第一光纤反射镜单元相连,所述第一光纤反射镜单元将传输激光通过所述第二光纤分束器单元反射回发送端,所述第二光纤分束器单元第一输出端口与所述第三光电探测器单元输入端口相连,所述第三光电探测器单元输出端口与所述第三放大器单元输入端口相连,所述第三放大器单元输出端口与所述第二功率分配器单元输入端口相连,所述第二功率分配器单元第一输出端口接到测试端,所述第二功率分配器单元第二输出端口提供给用户进行使用。
12.所述的测试端由第二鉴相器单元和第一数字万用表单元组成。
13.所述第二功率分配器第一输出端口与所述第二鉴相器单元第一输入端口相连,所述第一功率分配器第三输出端口与所述第二鉴相器单元第二输入端口相连,所述第二鉴相器单元输出端口与所述第一数字万用表单元相连,测试数据由所述第一数字万用表单元读取记录。
14.本发明采取上述技术方案所产生的有益效果在于:
15.本发明不同于现有的高精度光载时频传输系统的控制方案,包括基于常规pid控制移相器或延时线进行主动相位控制,以及基于被动的相位共轭的方式实现相位同步。本发明是基于单神经元pid控制算法,设计了环境自适应的高精度光载时频传输系统,通过单神经元pid控制器控制移相器,实现发送端和接收端频率信号的相位一致。仿真实验结果表明,单神经元pid控制器能够在突发情况下通过在线学习,调整pid参量,实现了重新恢复锁
定的功能,并且对于光载时频传输系统相位稳定度也实现了有效的提升。本发明所提出的环境自适应高精度光载时频传输装置和技术,为无人值守或恶劣环境条件下的时频传输应用场景,提供了新的解决方案。本发明的单神经元pid控制器能够根据外界环境的变化,通过在线学习,自适应调节pid参量,从而避免高精度光载时频传输系统由于外界环境瞬态变化而发生失锁;并且能够有效提升高精度光载时频传输系统相位稳定度。
附图说明
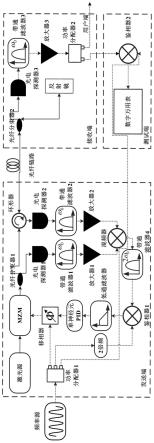
16.图1为基于移相器主动控制的高精度光载时频传递系统装置图。
17.图2为光纤传输链路相位噪声仿真图。
18.图3为常规pid控制下稳相传输结果图。
19.图4为单神经元pid控制下稳相传输结果图。
20.图5为为常规pid控制下稳相传输结果和单神经元pid控制下稳相传输结果的相位稳定度对比图。
具体实施方式
21.下面,结合附图和具体实施方式对本发明做进一步的说明。
22.参照图1,本实施例包括发送端、传输链路、接收端和测试端。
23.所述的发送端由第一激光器单元、第一马赫曾德调制器单元、第一光纤分束器单元、第一环形器单元、第一光电探测器单元、第二光电探测器单元、第一功率分配器单元、第一移相器单元、第一带通滤波器单元、第二带通滤波器单元、第一放大器单元、第二放大器单元、第一2倍频单元、第一低通滤波器单元、第一单神经元pid控制器单元、第一混频器单元、第四带通滤波器单元、第一鉴相器单元组成。
24.所述的第一激光器单元输出端口与所述的第一马赫曾德调制器单元输入端口相连,所述第一马赫曾德调制器单元输出端口与所述第一光纤分束器单元输入端口相连,所述第一光纤分束器输出端口分为两路,第一输出端口与所述第一环形器单元第一输入端口相连,第二输出端口与所述第一光电探测器单元输入端口相连,所述第一光电探测器单元输出端口与所述第一带通滤波器单元输入端口相连,所述第一带通滤波器单元输出端口与所述第一放大器单元输入端口相连,所述第一放大器单元输出端口与所述第一混频器单元第一输入端口相连,所述第一环形器单元第二输出端口与所述第二光电探测器单元输入端口相连,所述第二光电探测器单元与所述第二带通滤波器单元输入端口相连,所述第二带通滤波器单元输出端口与所述第二放大器单元输入端口相连,所述第二放大器单元输出端口与所述第一混频器单元第二输入端口相连,所述第一混频器单元将两路输入信号进行混频后,所述第一混频器单元输出端口与所述第四带通滤波器单元输入端口相连,所述第四带通滤波器单元输出端口与所述第一鉴相器单元第二输入端口相连,所述第一功率分配器单元将输入频率信号分为三路,所述第一功率分配器单元第一输出端口与所述第一移相器单元输入端口相连,所述第一移相器单元输出端口与所述第一马赫曾德调制器单元调制端口相连,所述第一功率分配器单元第二输出端口与所述第一2倍频单元输入端口相连,所述第一2倍频单元输出端口与所述第一鉴相器单元第一输入端口相连,所述第一鉴相器单元将两路输入信号进行混频鉴相,所述第一鉴相器单元输出端口与所述第一低通滤波器单元
输入端口相连,所述第一低通滤波器单元输出端口与所述第一单神经元pid控制器单元输入端口相连,所述第一单神经元pid控制器单元输出端口与所述第一移相器单元控制端口相连。
25.所述的接收端由第二光纤分束器单元、第三光电探测器单元、第一光纤反射镜单元、第三带通滤波器单元、第三放大器单元、第二功率分配器单元组成。
26.所述第二光纤分束器单元第二输出端口与所述第一光纤反射镜单元相连,所述第一光纤反射镜单元将传输激光通过所述第二光纤分束器单元反射回发送端,所述第二光纤分束器单元第一输出端口与所述第三光电探测器单元输入端口相连,所述第三光电探测器单元输出端口与所述第三放大器单元输入端口相连,所述第三放大器单元输出端口与所述第二功率分配器单元输入端口相连,所述第二功率分配器单元第一输出端口接到测试端,所述第二功率分配器单元第二输出端口提供给用户进行使用。
27.所述的测试端由第二鉴相器单元和第一数字万用表单元组成。
28.所述第二功率分配器第一输出端口与所述第二鉴相器单元第一输入端口相连,所述第一功率分配器第三输出端口与所述第二鉴相器单元第二输入端口相连,所述第二鉴相器单元输出端口与所述第一数字万用表单元相连,测试数据由所述第一数字万用表单元读取记录。
29.基于所述的第一单神经元pid控制器单元,结合上述装置,即可实现环境自适应的高精度光载时频传输,具体过程如下:
30.假设频率源输出频率信号为ω0,其初始相位为所述第一移相器单元引入的相位延迟为所述光纤链路引入的相位噪声为所述频率源输出电信号可以表示为:
[0031][0032]
经过所述第一移相器单元移相后,通过所述第一光电探测器单元探测解调,得到的电信号表达式为:
[0033][0034]
该信号依次经过所述第一带通滤波器单元和所述第一放大器单元进行滤波和放大,之后接入所述第一混频器单元第一输入端口。
[0035]
接收端中所述的第一光纤反射镜单元将经过光纤链路传输激光反射回发射端,经过发射端所述第一环形器单元后,由所述第二光电探测器单元探测解调。该信号经过了所述第一移相器单元移相以及往返经过所述光纤链路,因此其电信号表达式可以写为:
[0036][0037]
该信号依次经过所述第二带通滤波器单元和所述第二放大器单元进行滤波和放大,之后接入所述第一混频器单元第二输入端口。此时所述第一混频器单元输出端口的信号就可以通过两个输入信号计算出来,其电信号表达式可写为:
[0038][0039]
该信号经过所述第四带通滤波器滤波后,接入所述第一鉴相器单元第二输入端口。
[0040]
所述第一功率分配器单元第二输出端口输出的信号经过所述第一2倍频单元后,
其电信号表达式可写为:
[0041][0042]
该信号直接接入所述第一鉴相器单元第一输入端口。所述第一鉴相器单元输出信号就可以通过两个输入信号计算得到,其电信号表达式为:
[0043][0044]
该信号是一个直流信号,通过所述第一低通滤波器单元进行低通滤波后,接入所述第一单神经元pid控制器单元输入端口,作为控制算法的参考量。通过所述第一单神经元pid控制器单元对所述第一移相器单元相移量进行反馈控制,最终使得
[0045]
在这里,为了验证所述第一单神经元pid控制器单元的可行性,首先需要对所述光纤链路引入的相位噪声进行仿真研究。所述的光纤链路引入的相位噪声主要来源于温度和机械应力,其中温度是一个长期缓慢的影响,而机械应力则是一个短期急促的影响。其中,温度对光纤传输延时的影响可以表示为:而机械应力的影响则可以表示为:在上述两式中,y为单位长度单位温度下的延时变化量,为光纤的热膨胀系数,常温下普通单模光纤热膨胀系数为5.5
×
10-7
/℃,而为光纤的热光系数,常温下普通单模光纤热光系数为1
×
10-5
/℃,将光速与单模光纤折射率代入计算,得普通单模光纤受温度影响的每公里延时变化量为40ps
·
(km
·
℃)。表示光载波相位变化,e为杨氏模量,s为光纤横截面,f为轴向的应力,l为光纤的长度,n为光纤的折射率,μ为泊松比,p
11
、p
12
为光弹张量,β为传播常数。
[0046]
设光纤长度为10km,传输频率信号为1ghz,环境温度的漂移速度最快为0.1℃/s,设计pid控制电路采集速度和控制速度均为1khz,那么每个计数周期达到的温度变化为1
×
10-4
/℃,计算得到每个计数周期实现的最大延时量约为40fs,对于1ghz频率来说,相当于1.44
×
10-2
度的相位差。同时也在仿真中加入机械应力的影响,机械应力会导致相位的突变。在仿真实验中,假设施加的机械应力为70n,根据上式机械应力对传输延时的影响公式,计算得到光载波相位变化量约为127.55,这远超过2π的相移量,因此超过2π的部分可以省略,仅剩下未超过2π的部分,约为108度。将上述温度与机械应力的影响作用到光纤链路上,持续500s的时间,噪声仿真结果如图2所示。
[0047]
为了验证所述的单神经元pid控制器对所述的高精度光载时频传输能力的提升,对常规pid控制器进行了仿真研究,该方法使用单一pid参数对整个传输过程进行控制,仿真实验结果如图3所示。结果表明,常规pid控制器将发送端和接收端频率信号相位差稳定在了约0.4度以内,但是无法应对突变的情况,在机械应力的作用下立即失锁,且无法自动重新锁定。
[0048]
将pid控制器更换为所述的第一单神经元pid控制器单元,再次进行仿真实验研究,结果如图4所示。在100s至200s这段时间,由单神经元pid控制器控制后的相位差峰峰值明显小于常规pid控制结果,大约在0.15度以内。同时,在250秒时添加了一个机械应力的影
响,此时基于单神经元的pid控制器产生短期振荡,并快速收敛,收敛后重新锁定,该结果同样优于常规pid控制,收敛时间《40ms,也就是《40个控制周期。
[0049]
同时,将两次仿真实验结果进行阿伦方差的计算,以评估在两种不同控制器情况下,高精度光载时频传输系统的相位稳定度,稳定度结果对比如图5所示。常规pid控制的时频传递相位稳定度为6.19
×
10-13
@1s,而基于单神经元的pid控制时频传递相位稳定度为2.19
×
10-13
@1s,说明基于单神经元pid控制器的高精度光载时频传输系统在稳定度方面也得到了有效的提升。
[0050]
在所述的第一单神经元pid控制器单元完成相位控制后,所述接收端中所述的第三光电探测器单元探测解调得到的电信号为:
[0051][0052]
由于在所述发送端通过所述第一单神经元pid控制器单元对所述第一移相器单元的相移量进行了伺服反馈,使得因此上式也可写为:
[0053][0054]
也就是通过上述流程,完成了发送端信号到接收端信号的相位同步。
[0055]
所述第一单神经元pid控制单元具体工作流程如下:
[0056]
(1)给定初始权值wi(1),(i=1,2,3),选择学习速率ηi、η
p
、ηd和比例系数k;
[0057]
(2)采样得到rin(k)和yout(k),按式x1(k)=e(k)、x2(k)=e(k)-e(k-1)、x3(k)=e(k)-2e(k-1)+e(k-2)计算x1(k)、x2(k)、x3(k)作为单神经元的三个输入,其中e(k)=rin(k)-y(k);
[0058]
(3)根据式计算单神经元pid控制器的输出u(k);
[0059]
(4)根据式对单神经元pid控制器的权值进行调制,其中ω1(k+1)=ω1(k)+ηiz(k)u(k)(e(k)+δe(k))、ω2(k+1)=ω2(k)+ηpz(k)u(k)(e(k)+δe(k))、ω3(k+1)=ω3(k)+ηdz(k)u(k)(e(k)+δe(k))
[0060]
(5)置步长k=k+1,返回第(2)步,循环迭代运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1