基于核函数特征提取和套索算法的室内定位方法及装置
1.本发明涉及无线电技术领域,尤其涉及一种基于核函数特征提取和套索算法的室内定位方法及装置。
背景技术:
2.物联网技术的出现推动了新一轮信息科技的发展浪潮,无线通信技术也随之不断的革新。在国家大力支持下,以wlan、rfid、zigbee、蓝牙、移动互联网等技术为依托的多网融合技术,d2d(devices to devices)技术成为通信网络领域内的主要发展趋势,故此网络类型也日益趋向多元化,网络类型的多元化同时带动了网络应用的多样化。互联网出现的早期,网络能够提供的服务主要是文字类型的服务,随着网络的发展,基于互联网的应用从聊天、电子邮件发展到今天种类繁多的应用类型,如电商服务、多媒体服务等,各种领域内的传统服务模式也通过“互联网+”平台渐渐实现了线上的应用形式,在这些以网络为平台的诸多应用中,大多数都离不开用户的位置信息,故此位置感知技术的重要性毋庸置疑。
3.位置感知技术根据被定位地域不同可以分为室外定位技术和室内定位技术。传统的基于卫星的定位技术,如国内的北斗卫星导航系统(bds),美国的全球定位系统(gps),欧盟“伽利略”系统等,能够很好解决室外定位的需求,但用于室内定位时,由于室内建筑对卫星信号的影响,定位效果非常的不好。相反,短距离无线通信技术更加的适应于室内定位,其中,无线局域网(wireless localarea networks,wlan)技术因其在室内搭设简单、部署广泛、价格低廉等特性多被用来进行室内定位。
4.近年来,基于wlan技术的室内定位成为研究热点,其中,指纹架构类型的定位方法渐渐成为研究主流,这种指纹架构类型的室内定位方法, 通过利用无线电波信号的特征参数进行定位。然而,由于室内环境的复杂性,多径、阴影效应、人员走动、信道拥塞和节点的通信半径有限等因素的影响,无线信号很容易产生衰减,而且呈现时变特性,使得现有指纹架构类型的定位方法的定位精度不够高。
技术实现要素:
5.本发明提供一种基于核函数特征提取和套索算法的室内定位方法及装置,以解决现有指纹架构类型的定位方法的定位精度不够高的问题。
6.为了实现上述目的,第一方面,本发明提供一种基于核函数特征提取和套索算法的室内定位方法,所述方法包括:
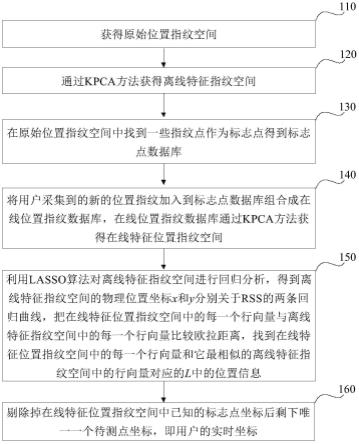
7.获得原始位置指纹空间f={f1,f2,f3ꢀ…ꢀfn
}
t
,其中,fi= {rss
i1
,rss
i2
,rss
i3
ꢀ…ꢀ
rss
in
}
t
,i∈(1,n),n表示选定区域中的参考节点数,每个参考节点的物理位置为li(xi,yi),n个参考节点的物理位置空间为 l=(l1,l2,l3,
…
ln)
t
;n表示各个参考节点上采集到的非视距的可接入点数; rss
in
表示对第i个参考节点的第n个可接入点进行p次采样后的接收信号强度均值(rss均值);
8.通过核函数特征提取方法(kpca方法)获得离线特征指纹空间f
′
,其中,
其中,k表示核矩阵;表示修正核矩阵;α表示的通过施密特正交化的特征向量;
9.在原始位置指纹空间中找到一些指纹点作为标志点得到标志点数据库s;
10.将用户采集到的新的位置指纹加入到标志点数据库s组合成在线位置指纹数据库o,在线位置指纹数据库o通过核函数特征提取方法(kpca 方法)获得在线特征位置指纹空间o
′
;
11.利用lasso算法对离线特征指纹空间f
′
进行回归分析,得到离线特征指纹空间f
′
的物理位置坐标x和y分别关于接收信号强度(rss)的两条回归曲线,把在线特征位置指纹空间o
′
中的每一个行向量与离线特征指纹空间f
′
中的每一个行向量比较欧拉距离,找到在线特征位置指纹空间o
′
中的每一个行向量和它最相似的f
′
中的行向量对应的l中的位置信息;
12.剔除掉在线特征位置指纹空间o
′
中已知的标志点坐标后剩下唯一一个待测点坐标,即用户的实时坐标。
13.在上述的基于核函数特征提取和套索算法的室内定位方法中,可选的是,所述通过核函数特征提取方法(kpca方法)获得离线特征指纹空间 f
′
,具体为:
14.将原始位置指纹空间f作为输入空间,计算核矩阵k,其中,k
ij
= exp(|f
i-fj|/-ε2),k
ij
表示k中的第i行第j列位置上的元素,i,j<=n;ε表示高斯核宽度;
15.通过公式计算得到修正核矩阵其中,ln表示一个n
×
n维的矩阵,矩阵中的每一个元素的数值都是1/n;
16.通过函数numpy.linalg.elg()计算的特征值和特征向量,获得的前k 个最大特征值λ1≥λ2…
λ
k-1
≥λk以及对应的特征向量v1≥v2…vk-1
≥ vk;
17.通过施密特正交化将v1,v2ꢀ…ꢀ
vk单位正交化得到α1,α2,
…
αk;
18.通过公式计算出离线特征指纹空间f
′
,其中α=(α1,α2,
…
αk)。
19.在上述的基于核函数特征提取和套索算法的室内定位方法中,可选的是,所述在原始位置指纹空间中找到一些指纹点作为标志点得到标志点数据库s,具体为:
20.以选定区域的中心为原点建立笛卡尔直角坐标轴,每隔一米采集坐标轴上的接收信号强度(rss)得到标志点数据库s。
21.第二方面,本发明提供一种基于核函数特征提取和套索算法的室内定位装置,所述装置包括:
22.原始位置指纹空间获得模块,用于获得原始位置指纹空间 f={f1,f2,f3ꢀ…ꢀfn
}
t
,其中,fi={rss
i1
,rss
i2
,rss
i3
ꢀ…ꢀ
rss
in
}
t
,i∈(1,n),n 表示选定区域中的参考节点数,每个参考节点的物理位置为li(xi,yi),n个参考节点的物理位置空间为l=(l1,l2,l3,
…ꢀ
ln)
t
;n表示各个参考节点上采集到的非视距的可接入点数;rss
in
表示对第i个参考节点的第n个可接入点进行p次采样后的接收信号强度均值(rss均值);
23.离线特征指纹空间获得模块,用于通过核函数特征提取方法(kpca 方法)获得离线特征指纹空间f
′
,其中,其中,k表示核矩阵;表示修正核矩阵;α表示的通过施密特正交化的特征向量;
24.标志点数据库获得模块,用于在原始位置指纹空间中找到一些指纹点作为标志点得到标志点数据库s;
25.在线特征位置指纹空间获得模块,用于将用户采集到的新的位置指纹加入到标志点数据库s组合成在线位置指纹数据库o,在线位置指纹数据库o通过核函数特征提取方法(kpca方法)获得在线特征位置指纹空间 o
′
;
26.位置信息获得模块,用于利用lasso算法对离线特征指纹空间f
′
进行回归分析,得到离线特征指纹空间f
′
的物理位置坐标x和y分别关于接收信号强度(rss)的两条回归曲线,把在线特征位置指纹空间o
′
中的每一个行向量与离线特征指纹空间f
′
中的每一个行向量比较欧拉距离,找到在线特征位置指纹空间o
′
中的每一个行向量和它最相似的f
′
中的行向量对应的l中的位置信息;
27.实时坐标获得模块,用于剔除掉在线特征位置指纹空间o
′
中已知的标志点坐标后剩下唯一一个待测点坐标,即用户的实时坐标。
28.在上述的基于核函数特征提取和套索算法的室内定位装置中,可选的是,所述通过核函数特征提取方法(kpca方法)获得离线特征指纹空间 f
′
,具体为:
29.将原始位置指纹空间f作为输入空间,计算核矩阵k,其中,k
ij
= exp(|f
i-fj|/-ε2),k
ij
表示k中的第i行第j列位置上的元素,i,j<=n;ε表示高斯核宽度;
30.通过公式计算得到修正核矩阵其中,ln表示一个n
×
n维的矩阵,矩阵中的每一个元素的数值都是1/n;
31.通过函数numpy.linalg.elg()计算的特征值和特征向量,获得的前k 个最大特征值λ1≥λ2ꢀ…ꢀ
λ
k-1
≥λk以及对应的特征向量v1≥v2ꢀ…ꢀvk-1
≥ vk;
32.通过施密特正交化将v1,v2ꢀ…ꢀ
vk单位正交化得到α1,α2,
…ꢀ
αk;
33.通过公式计算出离线特征指纹空间f
′
,其中α=(α1,α2,
…
αk)。
34.在上述的基于核函数特征提取和套索算法的室内定位装置中,可选的是,所述在原始位置指纹空间中找到一些指纹点作为标志点得到标志点数据库s,具体为:
35.以选定区域的中心为原点建立笛卡尔直角坐标轴,每隔一米采集坐标轴上的接收信号强度(rss)得到标志点数据库s。
36.本发明提供的基于核函数特征提取和套索算法的室内定位方法及装置,通过kpca方法有效的提取出数据中的非线性特征,通过lasso算法估计拥有稀疏参数的线性模型,减小模型的方差,kpca方法与lasso 算法两者相互配合,改善了传统特征提取法的特征提取能力而且提高了回归曲线的精度,能够更好的处理样本空间内禀的非线性据结构性质,将特征空间线性不可分的模式通过非线性映射到更高维特征空间实现聚类分析以及回归分析,从而进一步提升了室内定位的精度,且这种高精度的室内定位方法为室外定位提供有利的支持。
37.本发明的构造以及它的其他发明目的及有益效果将会通过结合附图而对优选实施例的描述而更加明显易懂。
附图说明
38.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根
据这些附图获得其他的附图。
39.图1为本发明实施例提供的基于核函数特征提取和套索算法的室内定位方法的流程图;
40.图2为本发明实施例提供的基于核函数特征提取和套索算法的室内定位装置的结构示意图。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明的优选实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的部件或具有相同或类似功能的部件。所描述的实施例是本发明一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。下面结合附图对本发明的实施例进行详细说明。
42.如图1所示,第一方面,本发明提供一种基于核函数特征提取和套索算法的室内定位方法,包括:
43.步骤110:获得原始位置指纹空间f={f1,f2,f3ꢀ…ꢀfn
}
t
,其中,fi= {rss
i1
,rss
i2
,rss
i3
ꢀ…ꢀ
rss
in
}
t
,i∈(1,n),n表示选定区域中的参考节点数,每个参考节点的物理位置为li(xi,yi),n个参考节点的物理位置空间为l=(l1,l2,l3,
…ꢀ
ln)
t
;n表示各个参考节点上采集到的非视距的可接入点数; rss
in
表示对第i个参考节点的第n个可接入点进行p次采样后的接收信号强度均值(rss均值);
44.需要说明的是,选定区域中包括n个参考节点,每个参考节点的物理位置为li(xi,yi),n个参考节点的物理位置构成位置空间l=(l1,l2,l3,
…ꢀ
ln)
t
;
45.在各个参考节点上采集到非视距的n个可接入点(access point,ap)的基于接收信号强度(received signal strength,rss)及媒体存取控制位址 (mac)信息,这里用mac信息作为每个wifi源的标识,mac信息仅仅是在离线采集阶段对每一个被采集的wifi源做一个标记,在实际算法中 mac信息并没有参与任何运算;
46.在每个可接入点上进行p次采集,将p次采样后的接收信号强度均值 (rss均值)作为该参考节点li(xi,yi)的原始位置指纹信息,这样一个原始的位置指纹信息是一个n维向量fi={rss
i1
,rss
i2
,rss
i3
ꢀ…ꢀ
rss
in
}
t
,i∈ (1,n),rss
in
表示对第i个参考节点的第n个可接入点进行p次采样后的接收信号强度均值(rss均值);将全部参考节点的原始位置指纹信息存储在相关数据库中,构成一个n
×
n维的矩阵,即f={f1,f2,f3ꢀ…ꢀfn
}
t
,矩阵 f中的每个行向量,都代表着一个参考节点的原始位置指纹向量,我们把这个f称为原始位置指纹空间,矩阵f中的每个行向量都代表着一个参考节点的原始位置指纹向量,每一个行向量的维数就是在这个空间中能够被采集到的可接入点的个数,每一个行向量都对应于物理位置空间l中的一个位置信息。
47.步骤120:通过核函数特征提取方法(kpca方法)获得离线特征指纹空间f
′
,其中,其中,k表示核矩阵;表示修正核矩阵;α表示的通过施密特正交化的特征向量,具体为:
48.将原始位置指纹空间f作为输入空间,计算核矩阵k,其中,k
ij
= exp(|f
i-fj|/-ε2),k
ij
表示k中的第i行第j列位置上的元素,i,j<=n;ε表示高斯核宽度,k为n
×
n维矩阵;
49.通过公式计算得到修正核矩阵其中,ln表示一个n
×
n维的矩阵,ln是一个很特殊的矩阵,矩阵中的每一个元素的数值都是1/n,也就是说决定ln每一个元素大小的是他的维数;
50.通过函数numpy.linalg.elg()计算的特征值和特征向量,获得的前k 个最大特征值λ1≥λ2ꢀ…ꢀ
λ
k-1
≥λk以及对应的特征向量v1≥v2ꢀ…ꢀvk-1
≥ vk;
51.通过施密特正交化将v1,v2ꢀ…ꢀ
vk单位正交化得到α1,α2,
…ꢀ
αk;
52.通过公式计算出离线特征指纹空间f
′
,其中α=(α1,α2,
…ꢀ
αk)。
53.需要说明的是,的特征值和特征向量通过python内置的函数 numpy.linalg.elg()得到;离线特征指纹空间f
′
是一个n
×
k维的矩阵。
54.使用kpca方法的优点在于:利用kpca方法,能够将线性不可分的数据通过非线性映射转换到一个高维空间,通常情况下,高维空间中更容易线性可分;然后在高维空间中使用标准pca将其映射到另一个低维空间中,使其可以被线性分类器划分。
55.步骤130:在原始位置指纹空间中找到一些指纹点作为标志点得到标志点数据库s,标志点的选取规则为:
56.以选定区域的中心为原点建立笛卡尔直角坐标轴,每隔一米采集坐标轴上的接收信号强度(rss)得到标志点数据库s。
57.需要说明的是,标志点数据库s独立于原始位置指纹空间f,标志点数据库s的建立也可以直接在原始位置指纹空间f中选择其中参考节点位置在坐标轴上的位置指纹向量。
58.步骤140:将用户采集到的新的位置指纹加入到标志点数据库s组合成在线位置指纹数据库o,在线位置指纹数据库o通过核函数特征提取方法(kpca方法)获得在线特征位置指纹空间o
′
;
59.需要说明的是,用户手中的app会主动采集用户所在处的位置指纹信息,用户每采集到一个点的位置指纹之后会把该指纹加入到标志点数据库 s中,我们把这个采集到的新的指纹称为定位阶段指纹,定位阶段指纹与标志点数据库s组合成在线位置指纹数据库o,在线位置指纹数据库o通过核函数特征提取方法(kpca方法)获得在线特征位置指纹空间o
′
,之所以要把定位阶段指纹和标志点数据库s结合是因为kpca方法无法从一个点中提取到特征值,所以需要额外添加已知的信息去满足kpca方法的要求;获得在线特征位置指纹空间o
′
采用的kpca方法与步骤120中获得离线特征指纹空间f
′
所采用的的kpca方法相同。
60.步骤150:利用lasso算法对离线特征指纹空间f
′
进行回归分析,得到离线特征指纹空间f
′
的物理位置坐标x和y分别关于接收信号强度 (rss)的两条回归曲线,把在线特征位置指纹空间o
′
中的每一个行向量与离线特征指纹空间f
′
中的每一个行向量比较欧拉距离,找到在线特征位置指纹空间o
′
中的每一个行向量和它最相似的f
′
中的行向量对应的l中的位置信息;
61.需要说明的是,获得离线特征指纹空间f
′
和获得在线特征位置指纹空间o
′
的过程中,f
′
、o
′
与物理位置空间l的对应关系保持不变,通过 lasso算法就可以得到f
′
中的特征值和l的对应关系,再把在线特征位置指纹空间o
′
中的每一个行向量与离线特征指纹空间f′
中的每一个行向量比较欧拉距离,找到在线特征位置指纹空间o
′
中的每一个行向量和它最相似的f
′
中的行向量,这个最相似的f
′
中的行向量对应的l中的位置信息就是我们需要的定位位置。
62.lasso算法是一种压缩估计,它通过构造一个惩罚函数得到一个较为精炼的模型,使得它压缩一些回归系数,即强制系数绝对值之和小于某个固定值,同时设定一些回归系数为零,因此保留了子集收缩的优点,是一种处理具有复共线性数据的有偏估计;lasso回归使得一些系数较小,甚至一些绝对值较小的系数直接变为0,因此特别适用于参数数目的选择与缩减,因而用来估计稀疏参数。
63.步骤160:剔除掉在线特征位置指纹空间o
′
中已知的标志点坐标后剩下唯一一个待测点坐标,即用户的实时坐标。
64.需要说明的是,设定一个时间戳保证步骤140至步骤160不断的循环,即可实现实时的室内定位;当用户在特定的空间移动时,该过程每隔一秒会主动触发一次以保证定位的实时性。
65.本发明提供的基于核函数特征提取和套索算法的室内定位方法及装置,通过kpca方法有效的提取出数据中的非线性特征,通过lasso算法估计拥有稀疏参数的线性模型,减小模型的方差,kpca方法与lasso 算法两者相互配合,改善了传统特征提取法的特征提取能力而且提高了回归曲线的精度,能够更好的处理样本空间内禀的非线性据结构性质,将特征空间线性不可分的模式通过非线性映射到更高维特征空间实现聚类分析以及回归分析,从而进一步提升了室内定位的精度,且这种高精度的室内定位方法为室外定位提供有利的支持。
66.如图2所示,第二方面,本发明提供一种基于核函数特征提取和套索算法的室内定位装置,包括:
67.原始位置指纹空间获得模块201,用于获得原始位置指纹空间 f={f1,f2,f3ꢀ…ꢀfn
}
t
,其中,fi={rss
i1
,rss
i2
,rss
i3
ꢀ…ꢀ
rss
in
}
t
,i∈(1,n),n 表示选定区域中的参考节点数,每个参考节点的物理位置为li(xi,yi),n个参考节点的物理位置空间为l=(l1,l2,l3,
…ꢀ
ln)
t
;n表示各个参考节点上采集到的非视距的可接入点数;rss
in
表示对第i个参考节点的第n个可接入点进行p次采样后的接收信号强度均值(rss均值);
68.离线特征指纹空间获得模块202,用于通过核函数特征提取方法 (kpca方法)获得离线特征指纹空间f
′
,其中,其中,k表示核矩阵;表示修正核矩阵;α表示的通过施密特正交化的特征向量,具体为:
69.将原始位置指纹空间f作为输入空间,计算核矩阵k,其中,k
ij
= exp(|f
i-fj|/-ε2),k
ij
表示k中的第i行第j列位置上的元素,i,j<=n;ε表示高斯核宽度,k为n
×
n维矩阵;
70.通过公式计算得到修正核矩阵其中,ln表示一个n
×
n维的矩阵,ln是一个很特殊的矩阵,矩阵中的每一个元素的数值都是1/n,也就是说决定ln每一个元素大小的是他的维数;
71.通过函数numpy.linalg.elg()计算的特征值和特征向量,获得的前k 个最大特征值λ1≥λ2ꢀ…ꢀ
λ
k-1
≥λk以及对应的特征向量v1≥v2ꢀ…ꢀvk-1
≥ vk;
72.通过施密特正交化将v1,v2ꢀ…ꢀ
vk单位正交化得到α1,α2,
…ꢀ
αk;
73.通过公式计算出离线特征指纹空间f
′
,其中α=(α1,α2,
…
αk)。
74.标志点数据库获得模块203,用于在原始位置指纹空间中找到一些指纹点作为标志点得到标志点数据库s,标志点的选取规则为:
75.以选定区域的中心为原点建立笛卡尔直角坐标轴,每隔一米采集坐标轴上的接收信号强度(rss)得到标志点数据库s。
76.在线特征位置指纹空间获得模块204,用于将用户采集到的新的位置指纹加入到标志点数据库s组合成在线位置指纹数据库o,在线位置指纹数据库o通过核函数特征提取方法(kpca方法)获得在线特征位置指纹空间o
′
;
77.位置信息获得模块205,用于利用lasso算法对离线特征指纹空间f
′
进行回归分析,得到离线特征指纹空间f
′
的物理位置坐标x和y分别关于接收信号强度(rss)的两条回归曲线,把在线特征位置指纹空间o
′
中的每一个行向量与离线特征指纹空间f
′
中的每一个行向量比较欧拉距离,找到在线特征位置指纹空间o
′
中的每一个行向量和它最相似的f
′
中的行向量对应的l中的位置信息;
78.实时坐标获得模块206,用于剔除掉在线特征位置指纹空间o
′
中已知的标志点坐标后剩下唯一一个待测点坐标,即用户的实时坐标。
79.需要说明的是:上述实施例提供的一种基于核函数特征提取和套索算法的室内定位装置与一种基于核函数特征提取和套索算法的室内定位方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
80.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1