面向空地一体化车联网的动态资源切片方法
1.本发明创造属于车用无线通信技术领域,具体是一种面向空地一体化车联网的动态资源切片方法。
背景技术:
2.车联网(internet of vehicles,iov)基于车用无线通信技术,将车辆、路边单元(road-side-unit)、基站和服务提供商连接为一个有机的整体,实现全方信息实时共享[1]。车载用户可以获得自动驾驶、路径规划、碰撞预警、车载娱乐、高清地图下载等服务[2]。车联网是一个动态环境。单纯依赖地面无线接入网络(radio access network,ran)很难为车载用户提供全方位随时随地的服务,并存在资源利用率低、难以提供稳定的服务质量(quality-of-service,qos)等问题[3]。空地一体化网络架构被认为是提升车联网管理灵活度、资源利用率和网络覆盖的有效方案[4]。在这种网络中,低功率的无人机小基站被按需部署在路网内,并可以动态调整部署位置。无人机小基站具有视距(light-of-sight)通信优势,有助于增强网络覆盖、提升链路质量和资源利用率。除了提供通信服务,无人机小基站还可以作为空中移动边缘计算(mobile edge computing,mec)服务器为车辆提供内容缓存和计算卸载等服务
[5]
。
[0003]
网络切片[6]是5g时代网络架构和服务模式的重要技术革新。通过将物理网络划分为多个逻辑独立的虚拟网络(即:切片),多个运营商可以共享同一物理网络的资源,从而提升网管灵活度,减少基础设施支出和运营成本。网络功能虚拟化(network functions virtualization,nfv)[7]和软件定义网络(software-defined networking,sdn)[8]是网络切片的支撑技术。在ran侧,基站功能包括无线接入和处理等,用于创建无线连接并分配资源。在无线nfv中,无线接入等功能以软件实例形式运行在基站上,由一个集中式的控制器进行管理。通过采集终端请求信息,控制器根据qos需求创建切片并依据网络实时流量或拓扑信息调度网络切片资源。
[0004]
车联网对网络切片技术有天然的依赖。这是因为车联网中多种服务并存且许多应用有严格的延迟和可靠性需求。然而,空地一体化车联网下的资源切片方法设计面临许多挑战。首先,静态网络切片方法无法适用于时变的网络环境,但频繁进行切片资源重分配也会增加网络控制开销。其次,无人机按需携带资源并部署,而网络切片需要为无人机预留资源。最后,车联网具有高速移动的特点。车辆与基站的连接持续时间因此减少,增加了工作流调度和网络切片资源管理的难度。
[0005]
现有技术中,由于ran切片在降低网络运营成本和提高资源利用率方面具有显著优势。文献[9]提出了一种基于时延感知的5g网络切片节点和链路映射成本最小化算法。采用两级队列动态调度模型,实现对映射成本与系统时延的平衡控制。依据特定业务流量统计信息,文献[10]提出异构无线网络下行频谱资源切片框架,为机器类型设备和移动用户设备提供差异化qos保障。该方案利用迭代优化方法解决资源分配和设备接入选择联合决策问题,旨在最大化网络效用。文献[11]在此基础上融入了发射功率自适应调节机制,设计
基于多接入边缘计算的频谱资源切片策略,为车辆网络应用提供定制服务。总体而言,基于模型优化的方法适合小规模ran切片,无法适应动态变化的空地一体化无线网络环境。
[0006]
如何分配ran资源支持任务卸载也会影响整体资源的利用率。自动驾驶任务往往具有差异化qos的特性。如果无线电资源的分配无法满足任务传输速率、时延或可靠性的要求,则可能无法实现计算的负载均衡。文献[12]研究了车辆网络协同计算卸载的联合通信和计算时间分配问题,将任务卸载资源、本地任务执行资源和车辆辅助任务迁移资源进行联合优化,以实现任务计算的整体最大可靠性。文献[13]针对计算任务的卸载目的地选择问题,设计了一种适用于边缘计算的自适应计算卸载方法,优化边缘计算系统的任务卸载延迟和资源利用。文献[14]为了缩小应用的服务质量要求与基站有限的计算资源之间的差距,提高设备和基站资源利用率,提出了一个结合任务卸载、设备-基站关联以及基站睡眠调度的在线优化问题,旨在最小化设备和基站的整体能量消耗。
[0007]
与传统地面网络资源管理不同,面向空地一体化车联网的资源切片需要考虑无人机小基站协同管理,车辆-基站关联,以及工作流调度等问题。这驱使本发明研究一种车辆关联模式和资源动态切分联合方法,应对动态变化的网络环境,为车辆应用提供差异化的qos保证。
技术实现要素:
[0008]
凭借机动部署和视距通信等优势,无人机小基站有潜力增强和拓展车联网服务。本发明提出面向空地一体化车联网的动态资源切片方法,目的是在提供差异化服务质量(quality-of-service,qos)保障基础上最大化车联网任务完成率。
[0009]
本发明的一种面向空地一体化车联网的动态资源切片方法,其应用的网络场景包含多个基站、多个车辆以及一个控制器;基站分为地面基站和无人机基站;基站接收来自覆盖范围内的所有的来自车辆的任务请求。根据延迟敏感型和延迟容忍型两种任务类型,把每个基站的频谱资源划分为两个分别面向两类任务服务的频谱资源切片;切片时间窗口t被分为多个等大小的调度窗口t;在切片时间窗口t内,基站按照切片方案分配频谱资源;在调度窗口t内,控制器对接收到的任务进行工作流调度;
[0010]
控制器根据路网中任务的服务类型和资源需求制定频谱资源切分策略,并根据切分策略对频谱资源进行切片;
[0011]
工作流调度的步骤为:车辆提出任务请求给基站;基站接收任务并卸载到控制器中的任务卸载队列中;基站按照控制器的工作流决策来处理任务;基站将任务的处理结果传回车辆,基站将任务的数据上传到控制器中;
[0012]
所述频谱资源切分策略的制定一方面来源于历史窗口的调度数据,减少了基站的计算压力;一方面来源于路网实际情况,以应对流量的动态变化;
[0013]
工作流调度需要综合考虑任务服务类型、qos限制、基站中可分配资源数量、排队信息等多个因素;
[0014]
通过动态切分各个基站的频谱资源和优化的工作流调度来适应网络中的服务类型的差异化和路网流量的动态性。
[0015]
所述频谱资源切分策略是根据实际情况动态变化;
[0016]
通过动态切分各个基站的频谱资源和优化的工作流调度来适应网络的动态性。
[0017]
本发明的技术贡献主要有:
[0018]
首先,设计一种多时间尺度动态资源切片框架,将大时间尺度上的资源切片与小时间尺度上的工作流调度进行有机协同,提升资源管理灵活性,减少不必要的信令开销。
[0019]
其次,基于排队论建模任务卸载过程,避免单个基站出现过载,保证网络服务的公平性。
[0020]
最后,提出一种负载均衡算法确定工作流调度,在保证qos的同时兼顾全局资源的高效利用。
[0021]
仿真结果表明,相较于现有方案,所提方案能提升任务完成数量、系统资源利用率,以及网络服务公平性。
附图说明
[0022]
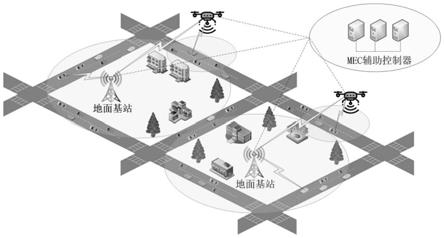
图1:空地一体化车联网示意图;
[0023]
图2:多时间尺度面向服务的资源切片框架示意图;
[0024]
图3:工作流调度框架示意图;
[0025]
图4:可用资源块数量对任务完成率的影响示意图;
[0026]
图5:车辆密度对全局资源利用率的影响示意图;
[0027]
图6:延迟敏感型服务占比对任务完成率的影响示意图;
[0028]
图7:无人机数量对任务完成率的影响示意图。
具体实施方式
[0029]
1、本发明概述
[0030]
本发明提出面向空地一体化车联网的动态资源切片方法,目的是在满足车辆应用任务卸载延迟需求的基础上最大化任务完成率。主要工作包括:
[0031]
1)为了提高ran资源管理灵活性,设计了一种多时间尺度动态资源切片框架。在大时间尺度上进行资源切片,在小时间尺度上进行工作流调度,增强切片资源提供的稳定性,减少信令开销。
[0032]
2)基于排队论刻画任务卸载过程,将每个基站处理任务的过程建模为m/m/1队列模型。通过监测任务排队情况,避免单个基站出现过载,实现网络服务的公平性。
[0033]
3)综合考虑车辆的高速移动性、差异化qos需求、任务排队和卸载延迟,开发一种负载均衡算法,根据网络环境实时确定工作流调度,在保证请求qos的同时,兼顾全局资源的高效利用。
[0034]
仿真结果表明,本发明提出的方法能有效适应车联网流量的时空变化,为车载用户提供稳定的服务。相比现有的方案,可以显著提高资源利用率,提高任务成果完成的概率。
[0035]
以下部分安排为:
[0036]
第2节对所提出的系统模型进行了详细地描述;
[0037]
第3节将频谱资源切片和工作流调度构建为一个带约束的随机优化问题;
[0038]
第4节将随机优化问题解耦为资源切片子问题和工作流调度子问题,并提出一种负载均衡算法;
[0039]
第5节介绍实验的参数设置和仿真结果;
[0040]
2系统模型
[0041]
2.1网络场景和假设
[0042]
如图1所示,本发明考虑一个空地一体化车联网场景,其中包含b个地面基站、k个无人机小基站和i个车辆。地面基站、无人机基站和车辆的集合分别被表示为为了降低车辆获得服务的时延,提高服务效率,加入一个由mec辅助的控制器。控制器和基站/无人机通过无线连接,在基站/无人机覆盖范围内的所有请求都可以交由控制器处理。车辆随机产生的请求由基站卸载到控制器中。控制器根据网络环境实时分配任务,并交由基站处理。最后,基站将处理结果传回车辆。车辆的任务到达率表示为λ。任务的集合表示为
[0043]
车辆需要处于基站的覆盖范围内才能连接基站卸载任务。定义基站j的有效覆盖半径表示为δj,其中基站j的三维坐标表示为(xj,yj,zj),车辆i的三维坐标表示为(xi,yi,zi)。定义基站j覆盖范围内的车辆集合为表示为
[0044][0045]
则车辆i在基站j的覆盖范围内可以表示为车辆配备两种信号接收器,分别用于连接地面基站和无人机。但每个车辆只能关联唯一的基站(地面基站或无人机基站)卸载任务。若车辆同时处于多个基站覆盖范围内,按照工作流调度决策选择基站连接。
[0046]
2.2动态资源切片框架
[0047]
车辆聚集和高速行驶会使得关联模式发生动态变化,进而触发网络资源调度。考虑到上述问题,本发明设计一种长短时协同优化的ran切片框架,对资源划分和车辆关联模式进行联合优化。如图2所示,本发明考虑两类典型的车联网请求,即:延迟敏感型请求和延迟容忍型请求。前者对应无人驾驶汽车编队控制[15]等,其延迟约束仅为100-150ms;后者的典型应用包括自动驾驶汽车高清地图下载[16],其延迟要求比较宽松。
[0048]
请求类型o=1(o=2)对应延迟敏感(延迟容忍)型任务。每个基站的物理资源(频谱资源)被划分为2个面向服务的资源切片,即切片1和切片2,分别支持延迟敏感型任务和延迟容忍型任务。每个切片内包含一个任务处理队列。定义wj为基站j持有的信道总个数。控制器按同样的比率{αw,βw}将各个基站的频谱资源切分为两份,即αw+βw=1。定义w
j,1
和w
j,2
分别为分配给基站j的延迟敏感型和延迟容忍型切片的子信道个数。
[0049]
由于车流量的时空变化,频谱资源的切分策略需要根据路网的实际流量情况个性化制定。如图2所示,切片时间窗口的集合被定义为在每个切片窗口(即切片时间窗口)内,控制器根据收集的历史请求信息制定切片方案。各个基站按照切片方案分配频谱资源。然后在小尺度上,本发明将每个切片窗口分为多个同等大小的调度窗口,即t={1,...,t,...}。在调度窗口t内,控制器对接收到的任务进行调度;各个基站按照工作流决策处理任务;基站将任务的处理结果传回车辆;基站将任务的数据上传到控制器中。
[0050]
2.3通信模型
[0051]
基站根据请求类型将同类切片中的资源以正交的形式分配给所关联的车辆。车辆i的发射功率被表示为pi。基站j的发射功率被表示为pj。定义σ2为平均背景噪声。基站分配给车辆的频谱资源相互正交,彼此不会产生干扰。车辆受到的干扰只来自其他基站的传输信号。若分配给车辆i请求类型o的子信道个数为w
j,o
,则基站j覆盖范围内车辆i产生的请求
类型o任务的上行传输速率被量化为
[0052][0053]
其中,j
′
代表基站集合中去除j的剩余基站。g
i,j
代表车辆i与基站j之间的信道增益,计算参照文献[17]。
[0054]
车辆接收基站的回传结果时,同样只受到来自其他基站的干扰。因此,从基站j回传请求类型o任务到车辆i的下行传输速率被量化为
[0055][0056]
2.4工作流调度模型
[0057]
本发明利用排队论[18]刻画基站处理任务的过程,并通过分析得到延迟敏感型和延迟容忍型任务的qos约束。在切片窗口t内,车辆i产生的任务m中包含任务的数据大小(bits)和任务处理完成的延迟需求,分别被表示为这一部分的推导都是在一个切片窗口t内进行,为了易于阅读,后续省略各个参数中的t。
[0058]
工作流调度框架如图3所示,控制器和基站都拥有延迟敏感型和延迟容忍型两个队列。队列管理模式为:
[0059]
1)车辆产生的任务由各个基站接收,并被卸载到控制器中的任务卸载队列中;
[0060]
2)遵循先来先服务的原则,控制器将任务交付基站处理;
[0061]
3)在接收到任务后,基站将其放入处理队列,并分配物理资源进行处理;
[0062]
4)基站将处理完成的结果转交给发出请求的车辆。
[0063]
2.4.1任务卸载延迟建模
[0064]
任务卸载延迟代表任务从车辆上行传输到基站j的时间。控制器和基站通过有线网络连接。在控制器覆盖的区域内,请求类型为o的任务从车辆传输到基站的平均时间被量化为
[0065][0066]
将单个车辆的任务到达建模为泊松过程,相应地基站接收到的任务到达也建模为泊松过程。定义二元变量a
ij
=1代表车辆i与基站j关联(association)。也就是说,请求类型o任务的到达率可以表示为
[0067][0068]
其中λ
i,o
表示车辆i产生请求类型o任务的到达率。
[0069]
卸载队列每次只处理一个任务。任务的卸载过程被建模为m/m/1队列模型。卸载队列的进队由任务到达率决定,卸载队列的出队由基站传输决定。当队列的进队速率大于出队速率时,队列中的任务会不断累积导致队列溢出。队列以服务强度反映繁忙程度,定义基站j中请求类型为o的卸载队列的服务强度为
[0070]
[0071]
式中μo表示请求类型为o的任务从车辆传输到基站的平均时间
[0072]
为了保持卸载队列的稳定性(防止队列溢出),公式(6)需要满足
[0073][0074]
任务在队列的位置从队头开始计算。将基站j的卸载队列中前n个任务的集合表示为ωj(n)。假设车辆i产生的请求类型为o的任务m被卸载至基站j且在卸载队列中排位为n,则该任务的卸载延迟被计算为
[0075][0076]
2.4.2任务移交延迟建模
[0077]
如图3所示,每个任务在基站的处理队列中计算完成后,直接由基站将结果传输回车辆。基于公式(3),在基站j中请求类型o的任务m回传给车辆i的移交延迟被表示为
[0078][0079]
任务延迟由卸载延迟和移交延迟组成,由(8)和(9)可得车辆i产生的请求类型o任务m的任务延迟为
[0080][0081]
延迟敏感型任务完成需要满足两个条件。必须需要满足延迟需求;必须在车辆离开基站的覆盖范围之前。定义γ
i,j,m
为车辆i产生任务m时距离基站j覆盖边缘的距离。则车辆i产生任务m时,在基站j的覆盖范围内的最大行驶时间可以被计算为
[0082][0083]
其中,vi表示车辆i的行驶速率。延迟敏感型任务完成的约束可以表示为
[0084][0085]
3问题建模
[0086]
通过动态切分各个基站的频谱资源和优化工作流调度来适应网络的动态性,本发明的目标是在满足差异化qos需求的基础上最大化任务完成数量。切片窗口t内的性能优化依赖于频谱资源切片策略和工作流调度策略,两者分别被定义为频谱资源切片策略和工作流调度策略给定义如下二元变量
[0087][0088]
代表在第t个调度窗口,车辆i连接基站j之后,任务处理是否满足延迟约束。如果能够满足延迟需求,则否则
[0089]
当任务在满足延迟约束的条件下完成时,系统获得对应的收益。相应地,若任务未能完成,系统产生对应的损失。
[0090]
定义1在第t个调度窗口内,任务完成且满足延迟需求时,系统获得的总奖励u
(t)
[0091][0092]
其中u
j,o
∈(0,1)代表请求类型为o的任务在基站j上的对应收益因子。
[0093]
定义2在第t个调度窗口内,任务未能满足延迟需求时,系统产生的总损失h
(t)
[0094][0095]
其中h
j,o
∈(0,1)代表请求类型为o的任务在基站j上对应的损失因子。
[0096]
道路中的车辆任务发布在时间和空间上存在一定的差异性。车流量分为高峰期和空闲期,因此,同一路段的任务数量会随时间而变化。由于红绿灯的交通管制,车辆常常聚集在十字路口处,而不会在中间路段作过多停留。
[0097]
在满足qos需求前提下,使系统长期性地完成更多的车辆任务是本发明的目标。以最大化车辆任务完成数为目标,动态ran切片问题被建模为
[0098][0099][0100][0101][0102][0103]
问题p0的实质是通过在线的方式,协调分配各个基站的频谱资源,分配区域的工作负载,使得在切片窗口t内系统的平均任务完成数最大。其中,约束(15a)保证每个基站j分配得到的子信道数为正数。约束(15b)保证每个基站分配给车辆的信道个数不超过自身持有的信道总数。约束(15c)保证了每个车辆只能连接唯一的地面基站/无人机小基站,而不能同时连接多个。约束(15d)保证了排队系统中队列的稳定性,同时,也表明了频谱资源的切片决策和工作流分配决策是耦合的,即耦合约束。
[0104]
4问题解耦与算法设计
[0105]
为了便于处理,将p0分解为频谱资源切片子问题和工作流调度子问题。频谱资源切片子问题通过给定工作流调度决策,求解最优的切片决策。
[0106]
本质上是一个带约束极值问题,适合使用传统的优化方法解决。工作流调度子问题是在给定切片决策的情况下,寻找最优的工作流调度决策。本子节设计一种负载均衡算法解决调度问题。
[0107]
4.1大时间尺度下的频谱资源切片子问题
[0108]
频谱资源切片子问题是在给定工作流调度决策的条件下,通过优化资源切片决策来最大化系统的请求完成数量。即
[0109][0110]
s.t.约束(15a),(15b)and(15c)
[0111]
根据公式(13)和(14)中关于系统收益的定义,在给定资源切片时,资源分配决定了基站可以处理完成任务的数量。任务完成的条件是分配足够的资源以满足延迟需求,每个任务彼此独立。频谱资源切片子问题的实质是最大化每个切片窗口内的任务完成数量。
每个切片窗口的决策是独立的,彼此互不影响。现实中的车流量不会出现连续的较大波动,相邻切片窗口的车流量具有相似性。对此,控制器可以使用上一个切片窗口的实际工作流决策来优化资源切片。控制器将每个切片窗口内的工作流决策记录下来,为下一个切片窗口优化资源切片决策提供参考,以最大每个切片窗口内的请求完成数量。上述问题对应于以下一次性优化问题:
[0112][0113][0114][0115]
约束(15b)
ꢀꢀ
(16c)
[0116]
问题p2是求解受多个条件限制的多元函数极值问题,可以使用拉格朗日乘数法对其求解。这种方法是将一个有多个变量和多个约束条件的最优化问题转化为一个有多个变量的无约束方程组的极值问题。p2问题被转化为p3。
[0117][0118]
在给定工作流决策的情况下,控制器可以计算出每个基站处理任务的具体数量。然后,根据任务的频谱资源需求、延迟需求以及各个基站和无人机的频谱资源持有量构建出频谱资源切片问题。计算p3可以得到一个最优的频谱资源切片方案,在该方案下,工作流调度的效率将得到提高,系统资源利用率也将得到提升。
[0119]
4.2小时间尺度工作流调度子问题
[0120]
工作流调度子问题的目标是在满足队列稳定的约束下最大化请求完成数量,即:在给定频谱资源切片决策的条件下,通过优化工作流调度决策来最大化系统的任务完成数量。
[0121][0122]
s.t.约束15(d)
[0123]
问题p1中,各个切片窗口的资源分配是相互独立的。相应地,在各个切片窗口中资源切片决策固定下进行工作流的调度也是相互独立的。因此,求解问题p4时可以将长期优化问题分解为各个调度窗口内的短期优化问题。
[0124]
工作流调度要考虑系统内等待处理的任务数量,各个任务对频谱资源的需求、等待时间以及延迟需求,还有各个基站、无人机的队列处理信息。为了提升资源利用率和请求完成数量,本子节设计一种负载均衡算法解决工作流调度问题,侧重全网资源的高效利用。
[0125]
控制器不仅需要卸载队列内每个任务的信息,还需要各个基站与无人机的频谱资源调度和内部处理队列中的任务信息。控制器按照先来先服务的策略分配卸载队列的任务,具体的工作流调度表示为算法1。
[0126][0127]
在算法1中,第6行判断任务在每个处理队列中的处理时间是否满足延迟需求;第10行判断每个基站剩余的频谱资源是否能满足当前任务需求;第14行判断当前任务在每个基站内的最大行驶时间是否满足延迟需求。在初始阶段,任务的连接选项是所有基站。本节算法综合考虑各个基站的频谱资源使用、任务处理时间、车辆与基站的连接时间多个因素,经过多次筛选,做出工作流调度决策。不仅提高了系统资源的利用率,也保证了任务处理的公平性。
[0128]
4.3联合优化框架
[0129]
本子节提出联合优化框架,将频谱资源切片子问题与工作流调度子问题整合求解。首先,系统根据历史数据中的任务信息划分切片窗口的长度。切片窗口确定后,将第t-1个切片窗口内的工作流调度决策作为求解问题p3的已知条件,并求解出资源切片决策第一个切片窗口的工作流调度决策由历史数据给出。将切片窗口t划分为多个同等大小的调度窗口t={1,...,t,...}。在每个调度窗口内,将资源切片决策作为求解问题p4的已知条件,得到每个调度窗口内的工作流调度决策。各个基站按照工作流调度决策处理任务。在最后一个调度窗口结束时,系统将每个调度窗口内的工作流调度决策整合为切片窗口t的工作流调度决策并记录为历史数据供第t+1个切片窗口使用。联合优化框架可以表示为算法2。
[0130][0131]
联合优化框架实现了资源切片和工作流调度的长期运行。利用相邻时间段车流量的相似性,将上个切片窗口的工作流调度决策作为已知条件,得到频谱资源切片决策。不仅减少了系统的计算任务,也可以提升切片决策的适用性。
[0132]
5实验设计与结果分析
[0133]
利用仿真方法验证所提出的方案的有效性。考虑一条长1000米的四车道高速道路,其中包含2个宏基站和3架无人机小基站。为了让仿真贴近现实环境,本发明选取的车流量数据来源为openits开放数据平台
①
。道路中的车辆密度被设置为0.4(辆/m2)。坐标原点为道路的起始点,两个宏基站分别覆盖一半公路,覆盖范围为500m。无人机预先设置于道路上,覆盖范围为80m。2个宏基站具有相同的发射功率为40dbm,3个无人机具有相同的发射功率为0.1w。延迟敏感型任务为无人驾驶汽车编队控制,延迟容忍型任务为自动驾驶汽车高清地图下载。其他参数如表1所示。
[0134][0135]
为了客观地评估性能,本发明选取3种代表性的资源管理和终端关联策略用于对比,包括:
[0136]
·
基于最大信噪比的资源管理方法(max-sinr)[19]:资源切片比例按照平均划分,控制器进行工作流调度时,选择与车辆连接最大信噪比的基站。
[0137]
·
随机的资源调度方法(random):资源切片比率随机分配,控制器进行工作流调度时,随机选择基站。
[0138]
·
无人机优先的车辆关联方法(rse-online)[20]:资源切片比例按照平均划分,控制器进行工作流调度时,优先选择空闲的无人机。
[0139]
首先,评估频谱资源增加对任务完成率的影响。仿真环境包括2个宏基站,3个无人机。从图4可以看出随着系统持有的资源块增加,系统的任务完成率也随之增加。当可用的资源块(resource block)数量在35个以下时,本方案的任务完成率优于其它三种方案。当可用资源块的数量增加到35以后时,除去随机调度的其他三种方案的任务完成率都几乎到达100%。这是因为当网络中可调度的资源不足时,每个方法的性能各有不同;当网络中的
资源充足时,所有任务都可以得到满足。
[0140]
图5评估了车辆密度对全局资源利用率的影响。当车辆密度为0.1辆/m2时,四种方案的全局资源利用率都在50%以下。这是因为网络中的任务稀疏,有些基站处于空闲状态,系统中的资源不能全部利用。另外可以看出随着车辆密度的增加,全局资源利用率不断升高。与基准方案[19][20]相比,本方案的资源利用率分别增加了29%和10%。在车辆密度增加到0.3辆/m2之后,基准方案[20]和本方案的资源利用率明显高于其他方案。这是因为车辆密度的增加导致任务数量变多,有效利用无人机的灵活调度使得系统资源利用率增加。然而,资源的利用率无法增加至100%。这是因为车辆必须要在基站的覆盖范围内才能与其连接并卸载任务,远离车辆的基站无法为其提供服务。
[0141]
图6评估了延迟敏感型服务占比增加对任务完成率的影响。随着延迟敏感型服务占比的增加,任务完成率不断降低。这是因为延迟敏感型服务的qos限制导致任务处理需要更多的资源。增加延迟敏感型服务的占比,是对系统的处理能力进行压力测试。从图中可以看出,本方案的任务完成率高于其他方案。这是因为本方案相较于其他方案更加注重无人机的调度和全局资源的利用。在面对极端条件时,展现出更好的鲁棒性。
[0142]
图7评估了在车辆密度为0.9(辆/m2)的场景下,无人机数量对任务完成率的影响。由图可知,当系统面对大量服务时,无人机调度数量的增加,可以有效增加任务的完成率。提升系统的性能。其中,随机调度方案对于无人机的增加并不敏感,任务完成比例不到一半。基准方案[19][20]和本发明方案的任务完成率都因为无人机的增加而得到提高。这是因为基站的位置固定,不能处理车联网环境中的所有任务。位于基站覆盖边缘的任务经常会因为远离基站而得不到处理。无人机可以很好地解决这个问题。当车联网中出现热点区域时,无人机可以被调度到热点区域以减少基站的压力,也能提高用户的服务质量。
[0143]
6总结
[0144]
本发明将时间划分为大小两个尺度,以适应车联网流量的时空变化,提升了系统处理能力的鲁棒性。针对车辆的两类典型请求,将频谱资源划分为两个切片,实现了服务qos的隔离,提升了车辆的任务完成率。本发明提出的负载均衡方案相较于现有方案,有效增加了任务完成数量,提升了系统资源利用率,实现了网络服务的公平性。
[0145]
___________________
[0146]
参考文献:
[0147]
[1]zhuang,w.,ye,q.,lyu,f.,cheng,n.,&ren,j.sdn/nfv-empowered future iov with enhanced communication,computing,and caching.proceedings of the ieee,2020,108(2):274-291.
[0148]
[2]ning,z.,hu,x.,chen,z.,zhou,m.,hu,b.,cheng,j.,&obaidat,m.s.a cooperative quality-aware service access system for social internet of vehicles.ieee internet of things journal,2017,5(4):2506-2517.
[0149]
[3]zhang,w.,zhang,z.,&chao,h.c.cooperative fog computing for dealing with big data in the internet of vehicles:architecture and hierarchical resource management.ieee communications magazine,2017,55(12):60-67.
[0150]
[4]liu,j.,shi,y.,fadlullah,z.m.,&kato,n.space-air-ground integrated network:a survey.ieee communications surveys&tutorials,2018,20(4):2714-2741.
[0151]
[5]cheng,n.,xu,w.,shi,w.,zhou,y.,lu,n.,zhou,h.,&shen,x.air-ground integrated mobile edge networks:architecture,challenges,and opportunities.ieee communications magazine,2018,56(8):26-32.
[0152]
[6]sexton,c.,marchetti,n.,&dasilva,l.a.customization and trade-offs in 5g ran slicing.ieee communications magazine,2019,57(4):116-122.
[0153]
[7]yi,b.,wang,x.,li,k.,&huang,m.a comprehensive survey of network function virtualization.computer networks,2018,133:212-262.
[0154]
[8]haque,i.t.,&abu-ghazaleh,n.wireless software defined networking:a survey and taxonomy.ieee communications surveys&tutorials,2016,18(4):2713-2737.
[0155]
[10]ye q,zhuang w,zhang s,jin al,shen x,li x.dynamic radio resource slicing for a two-tier heterogeneous wireless network.ieee transactions on vehicular technology,2018,67(10):9896-9910.
[0156]
[11]peng,h.,ye,q.,&shen,x.spectrum management for multi-access edge computing in autonomous vehicular networks.ieee transactions on intelligent transportation systems,2019,21(7):3001-3012.
[0157]
[12]omar,h.a.,zhuang,w.,abdrabou,a.,&li,l.performance evaluation of vemac supporting safety applications in vehicular networks.ieee transactions on emerging topics in computing,2013,1(1):69-83.
[0158]
[13]xu,x.,zhang,x.,liu,x.,jiang,j.,qi,l.,&bhuiyan,m.z.a.adaptive computation offloading with edge for 5g-envisioned internet of connected vehicles.ieee transactions on intelligent transportation systems,2020,22(8):5213-5222.
[0159]
[15]tsugawa,s.,jeschke,s.,&shladover,s.e.a review of truck platooning projects for energy savings.ieee transactions on intelligent vehicles,2016,1(1):68-77.
[0160]
[16]javanmardi,e.,gu,y.,javanmardi,m.,&kamijo,s.autonomous vehicle self-localization based on abstract map and multi-channel lidar in urban area.iatss research,2019,43(1):1-13.
[0161]
[17]erceg,v.,greenstein,l.j.,tjandra,s.y.,parkoff,s.r.,gupta,a.,kulic,b.,...&bianchi,r.an empirically based path loss model for wireless channels in suburban environments.ieee journal on selected areas in communications,1999,17(7):1205-1211.
[0162]
[18]xue,j.,wang,z.,zhang,y.,&wang,l.task allocation optimization scheme based on queuing theory for mobile edge computing in 5g heterogeneous networks.mobile information systems,2019,62(2):1-3.
[0163]
[19]ye,q.,zhuang,w.,zhang,s.,jin,a.l.,shen,x.,&li,x.dynamic radio resource slicing for a two-tier heterogeneous wireless network.ieee transactions on vehicular technology,2018,67(10):9896-9910.
[0164]
[20]tang,l.,zhao,g.,wang,c.,zhao,p.,&chen,q.queue-aware reliable embedding algorithm for 5g network slicing.computer networks,2018,146(9):138-150.
[0165]
附中文参考文献:
[0166]
[9]唐伦,杨恒,赵国繁,王耀玮,陈前斌.基于时延感知的5g网络切片节点和链路映射算法.北京邮电大学学报,2018,41(6):71-77.
[0167]
[14]于博文,蒲凌君,谢玉婷.移动边缘计算任务卸载和基站关联协同决策问题研究[j].计算机研究与发展,2018,55(3):537-550.
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1