一种高精度水柱测偏方法、系统、设备及计算机介质与流程
1.本发明涉及雷达目标检测领域,具体涉及一种高精度水柱测偏方法、系统、设备及计算机介质。
背景技术:
2.实际目标都是包含多个散射中心的而不是理想的点目标,宽带雷达可以分辨目标上的各个散射中心,每个距离单元都可以看做一个点目标,而点目标的测距精度与信号带宽成正比,因此宽带雷达具有更高的测距精度。实际目标都是包含多个散射中心的而不是理想的点目标,宽带雷达可以分辨目标上的各个散射中心,每个距离单元都可以看做一个点目标,而点目标的测距精度与信号带宽成正比,因此宽带雷达具有更高的测距精度。
3.根据弹着水柱落点偏差进行对海射击校正,是当代大众口径舰炮武器系统普遍采用的一种手段。
4.校射,即用测量设备测定弹(指炮弹射出后落入水中溅起的水柱位置)目(目标舰船的位置)之间的相对矢量偏差,用以修正下一发炮弹的射击参数。水柱测偏是舰炮武器系统提高(对海)射击命中率的重要手段,新型舰炮的不断发展对校射方法提出了更高的要求,也给雷达带来了新的挑战。
5.弹着水柱的落点测量的传统方法为人为检测的方法:雷达天线在方位一定范围内扇扫,发射信号一般为窄带信号,操作手通过b式平面显示器观测,并利用摸球提取水柱相对目标的方位和距离偏差。
6.传统使用窄带信号进行水柱偏差检测方法在实际使用中存在以下的缺点:对于同一距离单元同时存在多个水柱的情况,受雷达最小分辨单元的限制,水柱回波为多个水柱合成波,雷达无法区分,输出偏差为合成波偏差;同时传统的窄带雷达因为分辨率较低,目标(舰船)被视为点目标,舰船具体位置、结构等信息不明。致使指挥员无法准确判断打击态势,进行精准打击。因此传统窄带水柱测偏方法无法适应未来海战场环境的作战任务的多样性和环境的多变性。
技术实现要素:
7.为了解决上述问题,本发明提出了一种高精度水柱测偏方法,包括以下步骤:
8.对目标进行跟踪的同时,在目标跟踪波门的前后限定范围内布置限定多个水柱检测波门;
9.采用宽带信号和同时多波束技术对水柱以及目标进行扫描,形成高分辨率二维图像,得到多个水柱落点位置和时间;所述目标由多个散射中心组成;
10.根据多个水柱落点位置定位水柱中心,得到水柱中心相对目标的各个散射中心的方位距离偏差;所述多个水柱只有一个水柱中心。
11.进一步地,还包括:
12.根据水柱落点位置和目标的位置得到的偏差结果以及水柱出现的时间顺序,编制
多目标批次,完成多目标时序控制以及参数处理。
13.进一步地,还包括:
14.当水柱的信噪比低于门限设定值或水柱持续时间超过相应设定值时,则撤销对其跟踪。
15.进一步地,所述目标为舰船,所述根据目标的各个散射中心获得目标的简单模型,即选取尖锐突起、折角、腔体、以及表面边缘的电磁散射中心作为目标的散射中心从而获得目标的简单模型。
16.进一步地,所述方位距离偏差中的最小值为目标上的距离水柱中心最近的散射中心与水柱中心之间的距离,最大值为船头或船尾距离水柱中心的距离。
17.进一步地,目标跟踪波门前后限定范围具体为以目标为中心,距离偏差为-1km~1km、方位偏差为-3
°
~+3
°
的区域。
18.还提供了一种高精度水柱测偏系统,所述系统包括目标跟踪模块和信号处理模块,所述目标跟踪模块根据接收的指示对目标和水柱进行跟踪,并得到水柱和目标的各个散射中心之间的方位距离偏差,将方位距离偏差发送给信号处理模块;系统的信号处理模块根据方位距离偏差以及水柱出现的时间顺序,编制多目标批次,完成多目标时序控制以及参数处理;所述系统基于上述任一方法实现。
19.还提供了一种高精度水柱测偏设备,包括:
20.存储器,用于存储计算机程序;
21.处理器,用于执行计算机程序时实现上述任一高精度水柱测偏方法的步骤。
22.还提供了一种计算机介质,所述计算机介质上存储有计算机程序,计算机程序被处理器执行是实现上述任一高精度水柱测偏方法的步骤。
23.与现有技术相比,本发明具有以下有益效果:
24.(1)本发明的发明与现有窄带单脉冲顺序扫描相比,对各种位置、形态水柱可实现高效成像,增强水柱测量精度,实时输出弹着水柱相对目标(舰船)的方位和距离偏差等瞬时测量信息。
25.(2)本发明的系统降低了人工干预误差,并且具有检测速度快、弹着水柱落点测量精度高等特点;采用宽带信号代替窄带脉冲,可获得多个水柱落点高分辨距离像,精准定位中心水柱落点范围;同时方位维采用同时多波束体制取代顺序扫描,实现对水柱的“快速”测量,进一步凸显水柱特征,可完成对海射击水柱精准校射。
26.(3)本发明方法的使用对提高舰炮对海校射精度,增强舰炮武器系统的作战效能具有重要意义。
附图说明
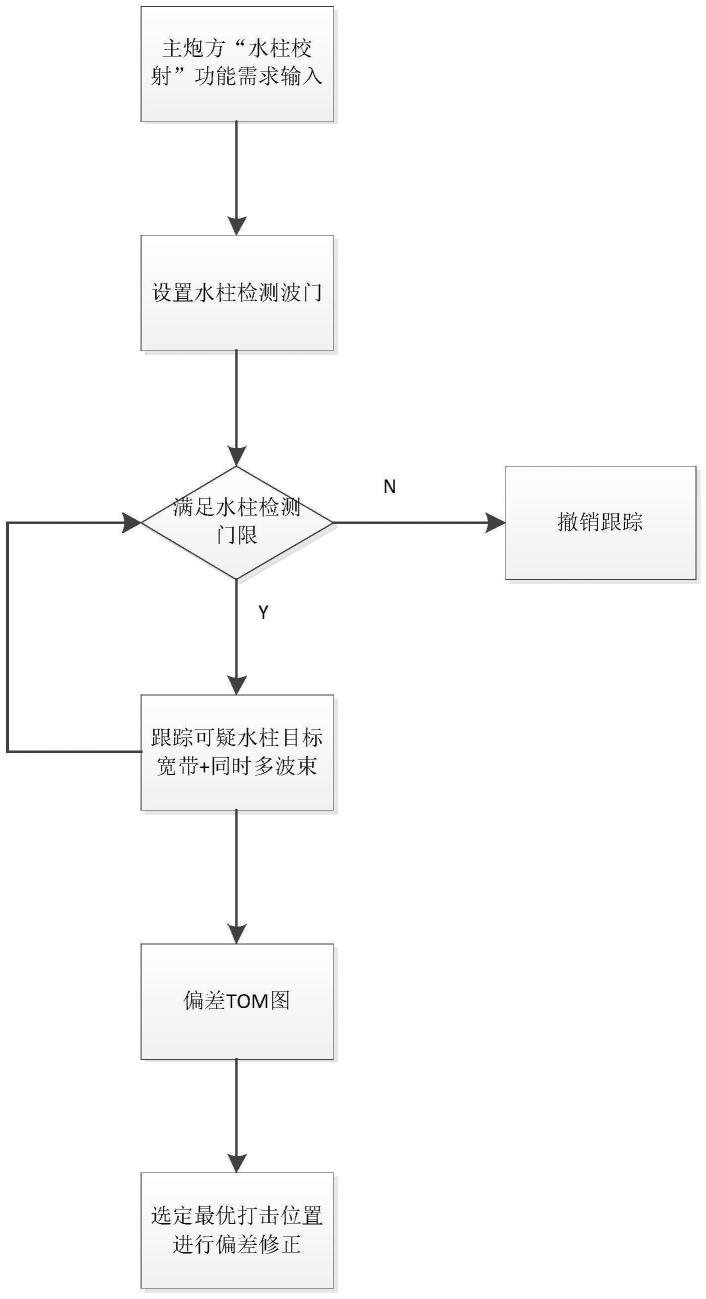
27.图1是本发明实施例一的流程图。
28.图2是本发明实施例一的舰船目标模型图。
29.图3是本发明实施例一的水柱与目标各散射点相对位置分布示意图。
30.图4是本发明实施例一的舰姿角为50
°
时水柱及目标散射点分布图。
31.图5是本发明实施例一的舰姿为50
°
时的窄带条件成像图。
32.图6是本发明实施例一的舰姿为50
°
时的宽带条件成像图。
33.图7是本发明实施例一的舰姿为0
°
时的宽带条件成像图。
具体实施方式
34.以下结合附图对本发明的高精度水柱测偏方法的具体实施方式做详细说明。
35.实施例一
36.本实施例采用自动水柱测偏技术,在无操作人员干预条件下独立完成对水柱目标的检测。
37.对于窄带雷达,目标(舰船)通常被认为是点目标,其回波不能反映目标的精细结构信息,水柱测量结果存在较大偏差,无法实现对目标重点部位进行针对性打击。而宽带雷达可以获得目标的高分辨一维距离像,而且可以获得目标的sar或isar图像,非常有利于对目标舰船的精准识别。
38.本实施例采用宽带多波束体制,针对不同水柱落点位置以及形态实现准确、快速测量。采用宽带信号可获得较高的距离分辨率,对存在多个水柱的具体情况,可定位到水柱落点分布情况,选取水限定范围内的各个水柱偏差得到统计偏差值,准确锁定弹着点位置。在方位上采用密集多波束技术,两者叠加可形成高分辨率二维图像。根据中心水柱的具体位置及形态可准确把握态势,迅速调整二次发射状态,实现目标精准打击。
39.如图1所示,本实施例所述的高精度水柱测偏方法,具体包括以下步骤:
40.水柱测偏采用宽带信号形式,雷达距离分辨单元远小于目标(舰船)上各个主要部分的尺寸,目标在回波中不再表现为“点”,被照射后的散射效果可以看作目标内多个独立散射中心散射效果的总和。从结构特性分析,目标较强的电磁散射中心主要是平面、尖锐突起、折角、腔体、以及表面边缘等特定部分。我们可以对不同舰船位置建立相应的散射中心模型,测量水柱相对于舰船目标各个散射中心的距离偏差,得到多个落点偏差值。其中最小值为舰船距离水柱最近的船体位置,最大值为船头或船尾距离水柱的位置。
41.图1为本实施例的主流程图,包括下列步骤:
42.步骤一:“水柱校射”功能需求输入。对海工作模式下,主炮方用户根据武器系统需求以及实际作战对象、作战目标,选择“水柱校射”功能。
43.步骤二:设置水柱检测波门。系统收到“水柱测量”指示后,在跟踪目标(舰船)的同时,在目标(舰船)跟踪波门前后一定距离范围内,各布置一定数量的水柱检测波门。本实施例中的目标跟踪波门前后限定范围具体为以目标为中心,距离偏差-1km~1km、方位偏差-3
°
~+3
°
的区域。
44.步骤三:跟踪可疑水柱目标。采用宽带信号和同时多波束技术对可以水柱进行扫描,形成高分辨率二维图像,精细化凸显水柱特征。
45.步骤四:提供偏差威胁目标图(target object map,tom)。根据多个水柱落点位置、密集程度定位水柱中心,输出水柱中心相对目标的各个散射中心(船头、船尾、船体最近位置)的方位距离偏差,送至系统的信号处理模块处理后发送给武器系统。
46.本实施例中目标的各个散射中心由具有简单形状目标模型获得,所述目标的简单模型包括两个三角形和位于三角形之间的矩形,所述两个三角形分别代表船头和船尾,矩形代表船体上除船头和船尾的中间段,所述散射中心分别位于三角形、矩形的顶点及矩形的边上。如图2所示,本实施例的目标模型的散射中心点数为9;水柱与目标各散射点相对位
置分布如图3所示。采用窄带脉冲信号进行发射时带宽设置为10mhz,设雷达发射信号宽带信号带宽为600mhz,则其距离分辨率为0.25m。设船身径长均为110m,选取舰姿角为50
°
时,得到目标二维图像仿真结果如图4所示。
47.图4为舰姿为50
°
时采用窄带信号时得到的水柱落点以及目标散射点分布示意图,图5为舰姿为50
°
时采用窄带信号时得到的水柱落点及目标二维图像,从图4和图5可见,由于距离分辨率较大,水柱各落点以及舰船各散射点中心分布在同一距离单元内,导致无法细致区分各个水柱落点以及舰船的具体姿态和中心位置。
48.图6为在同样条件下,采用宽带信号得到的水柱落点与目标的二维图像,可以清晰分辨水柱落点中心位置以及目标的具体姿态、位置。由此得到的测偏结果可以更为清晰地反映水柱中心落点与船头、船尾、以及船沿等各9个船身部位的相对位移,形成如图3类似的tom图。
49.图7为当舰姿为0
°
时水柱落点与目标的二维图像,清晰可见当目标(舰船)相对于水柱的方位姿态发生变化时,各散射点中心与水柱落点中心的相对距离也将发生变化,测偏结果随之改变。
50.步骤五:选择精准打击位置。武器系统根据tom图精确选择最优打击位置,例如:船头、船中心或者船舷最近位置,获取相应的距离偏差,以便准确调整炮口位置。本实施例中武器系统得到水柱落点中心位置与舰船9个散射点中心位置方位距离差r1,
…
,r9,选取最优打击位置,得到相应精确的距离差。其中最小值为舰船距离水柱最近的船体位置,最大值为船头或船尾距离水柱的位置。多个散射点中心的存在可以保证无论舰姿如何变化,均能实现最优打击点确认,得到最精准偏差测量,避免了因为舰船状态变化而引起的校准误差。
51.步骤六:偏差修正。系统的信号处理模块根据目标最优打击点与水柱的相对位置,以及水柱出现的时间顺序,编制多目标批次、序号,完成多目标时序控制以及参数处理。
52.步骤七:撤销跟踪。当水柱的信噪比低于门限设定值或水柱持续时间超过相应设定值时,则自动撤销对其跟踪。
53.实施例二
54.本实施例提供了一种高精度水柱测偏系统,所述系统基于实施例一的方法实现。
55.所述系统包括目标跟踪模块和信号处理模块,所述目标跟踪模块根据接收的指示对目标和水柱进行跟踪,并得到水柱和目标之间的偏差结果,将结果发送给信号处理模块;系统的信号处理模块根据偏差结果以及水柱出现的时间顺序,编制多目标批次,完成多目标时序控制以及参数处理。
56.实施例三
57.本实施例提供了一种高精度水柱测偏设备,包括:
58.存储器,用于存储计算机程序;
59.处理器,用于执行计算机程序时实现实施例一所述的高精度水柱测偏方法的步骤。
60.实施例四
61.本实施例提供了一种计算机介质,计算机介质上存储有计算机程序,计算机程序被处理器执行是实现如上实施例一所描述的高精度水柱测偏方法的步骤。
62.与现有窄带单脉冲顺序扫描相比,此发明采用宽带多波束信号,对各种位置、形态
水柱、目标可实现高效成像,增强水柱测量精度、减少水柱检测时间,实时输出弹着水柱相对目标(舰船)各个部位的方位和距离偏差等瞬时测量信息。
63.对于常规采用固定窄带单脉冲顺序扫描的方法,由于水柱目标瞬时出现、变化迅速、持续时间短暂,受最小可分辨单元的限制,检测得到的结果稳定性与精度较差,这使得测偏准确性大幅度下降。
64.采用宽带信号后,水柱以及目标(舰船)被分解为由多个散射点中心组成的精细化模型,测偏结果可以更为清晰地反映水柱分散落点与船体各个部位的相对位置,形成tom图,方便指挥员精准把握当前态势、准确调整炮口位置,完成针对性打击任务。同时方位维采用同时多波束体制取代顺序扫描,实现对水柱的“快速”测量,进一步凸显水柱特征,“精”准校射,多方位调整弹丸发射。
65.本发明方法的使用对提高舰炮对海校射精度,增强舰炮武器系统的作战效能具有重要意义。
66.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1