节肢动物的检测的制作方法
节肢动物的检测
1.本发明涉及借助于相机检测在植物生长的区域中的节肢动物(益虫和/或害虫)。
2.目前已知的物种中约有三分之二是节肢动物(节肢动物门),其中85%是昆虫。节肢动物中有相当一部分是植食性的:这些动物以植物为食,并且可导致生长障碍,导致吸食损伤和咬伤,并且传递病毒性疾病。例如,这种情况导致了农作物种植的产量和质量的相当大损失。
3.除了这些害虫,还有一些节肢动物是对农作物的生长有益的。这些益虫可能是害虫的天敌,因为它们大幅削减害虫的数量或阻止害虫进一步繁殖,因为害虫是它们或其后代的食物。其他益虫对植物的繁殖至关重要:特别是蜜蜂、熊蜂、蝇和蝴蝶寻找花蜜的过程中从花中采集花粉,将所述花粉转移到相邻的花上,从而确保授粉。
4.在现代农业中,检测和识别农业利用区内的益虫和/或害虫扮演着重要的角色。
5.为了控制与害虫有关的虫害,通常使用黏性的彩色平板或黄色诱捕盘。许多害虫,例如油菜籽害虫,会被该盘或平板的黄色所吸引。所述黄色诱捕盘被填充有水,可以在水中加入表面活性剂,以便降低表面张力,使得吸引的害虫被淹死。在黏性平板的情况下,害虫保持粘在胶上。定期对诱捕器进行监测。通过对诱捕器中存在的害虫的数量进行计数,可以确定损害阈值。然而,计数是费力的并且易于出错。
6.wo2018/054767公开了一种系统,该系统包括有害生物的诱捕器、智能手机和服务器。农民可以使用智能手机来生成诱捕器的内容物的数字图像。该图像通过通信网络被传输至服务器,在服务器中对所述图像进行评估。农民从服务器接收关于被诱捕的有害生物的数量和物种的信息。wo2018/054767中公开的系统的缺点是,人必须先找出诱捕器才能进行虫害检查。
7.kr1020100127473公开了一种系统,该系统包括:诱捕器,该诱捕器在吸引剂(信息素)帮助下吸引昆虫;相机,该相机生成存在于诱捕器内的昆虫的图像;发送器单元,该发送器单元将图像无线传输到分析单元;以及分析单元,用于分析图像。因此,可以对诱捕器进行远程监控。该诱捕器配备有粘性层,以便使昆虫固定。随着时间的推移,越来越多的昆虫以及土壤会聚集在粘性带上,使得必须不时地找出诱捕器以便更新粘性层。另一个缺点是:益虫也可能进入这样的诱捕器并且死在诱捕器中。
8.从农业的角度来看,重要的因素不仅是害虫的虫害密度,还包括以害虫作为食物来源或寄主的益虫的存在,或者由于其他原因对成功收获至关重要的益虫(例如,传粉者)的存在。例如,可以想到的是,虫害密度高,但是害虫被足够数量的益虫所抵制,这些益虫阻止了害虫的进一步繁殖和/或传播。因此,可以想到的是,单独一个区中的特定害虫种类的数量不能得出关于是否可以认为害虫威胁收获的任何结论。如果同时存在足够多数量的抑制害虫的益虫,则收获损失的风险可归为低。可以想到的是,在这种情况下,不应采取措施对付害虫,因为某些措施(例如,应用杀虫剂)也可能产生不利的伴随现象(例如,抗药性、植物毒性、侵害益虫)。
9.在给定的虫害密度下,正在生长的植物的状况对于是否存在产量损失的威胁也可能是至关重要的,因为不健康或衰弱的植物比健康植物更容易受到害虫的损害。
10.本发明致力于解决上述问题。
11.借助于本发明,可以确定一个区中害虫和/或益虫的存在。
12.优选地,“害虫”应理解为是指出现在农作物生长过程中并且损害农作物或对所述农作物的收获产生不利影响的节肢动物。
13.优选地,害虫是来自昆虫群组(从幼虫(毛虫、伪毛虫)到成虫阶段的各个阶段)或蛛形纲动物群组的动物害虫。更优选地,害虫是农业害虫,例如苹果小卷蛾、蚜虫、蓟马、夏季水果卷蛾、科罗拉多马铃薯甲虫、樱桃果蝇、金龟子、欧洲玉米螟、梅果蛾、杜鹃叶蝉、萝卜蛾、鳞片虫、吉卜赛蛾、蜘蛛螨、欧洲葡萄蛾、核桃壳蝇、温室粉虱、油菜茎象鼻虫、白菜茎象鼻虫、油菜花粉甲虫、白菜芽象鼻虫、芸苔荚蠓或白菜茎跳蚤甲虫,或林业害虫,例如蚜虫、蓝钢宝石甲虫、树皮甲虫、橡树辉煌甲虫、橡树前进蛾、绿橡树卷叶蛾、云杉网虫、常见家具甲虫、大棕树皮食虫、常见松木锯蝇、松夜蛾、松尺蠖、小云杉锯蝇、松蛾、马栗树叶矿虫、吉普赛蛾或棕色粉蠹虫。
14.术语“农作物”应理解为是指通过人为干预而具体地生长为有用植物或观赏植物的植物。
15.优选地,“益虫”应理解为是指以害虫作为食物来源或宿主的节肢动物,或出于其他原因(例如作为授粉者)对成功收获重要的节肢动物。优选地,益虫是昆虫(从幼虫(毛虫、伪毛虫)到成虫阶段的各个阶段)或蛛形纲动物。最优选地,益虫是授粉者(花粉供体),例如蜜蜂、熊蜂、蝇和蝴蝶,或者以害虫作为食物来源的节肢动物,例如鱼龙黄蜂或瓢虫。
16.在本说明书中,害虫和益虫统称为节肢动物(拉丁文:arthropoda)。因此,术语“节肢动物”可以具有“害虫”的含义,可以具有“益虫”的含义,可以具有“害虫或益虫”的含义,也可以具有“害虫和益虫”的含义。术语“(特种)节肢动物”可以具有节肢动物的含义或者特种节肢动物的含义;类似地,术语“(特种)害虫”((specific)pest)、“(特种)益虫”((specific)beneficial)和“(特种)控制手段”也是如此。
[0017]“区”应理解为是指在空间上可定界的地球表面的植物生长的区域。优选地,所述区至少部分地利用于农业,即农作物被种植在一个或多个田地中,被供应养分并且被收获。所述区也可以是或包括地球表面的利用于林业的区域(例如森林)。术语“区”也涵盖仅出于人类娱乐目的的存在植被的花园、公园等。
[0018]
优选地,一个区包括用于农作物的多个田地。在一个优选的实施方案中,一个区对应于农作物的生长区域(关于生长区域的定义,参见,例如journal f
ü
r kulturpflanzen,61(7).p.247
–
253,2009,issn0027
‑
7479)。在另一个优选的实施方案中,一个区对应于生物群落(对于等同的德国术语boden
‑
klima
‑
raum的定义例如参见nachrichtenbl.deut.pflanzenschutzd.,59(7),p.155
–
161,2007,issn 0027
‑
7479)。
[0019]“分区”被理解为是指一个区内的优选地相连的区域。分区优选地是一个或多个田地,在该田地中生长特定的农作物。优选地,分区由农民耕种,该农民对多个成像设备以及可选地一个或多个植物分析设备具有注册访问权。优选地,针对一个分区确定虫害密度和损害阈值,尤其是当该区足够大以至于针对一个分区确定的虫害密度超过损害阈值并且针对相同区的另一个分区确定的虫害密度没有超过损害阈值时。
[0020]
在作物保护中,从环境和经济的角度确定损害阈值是必不可少的。损害阈值表明害虫的虫害密度,并且在超过该损害阈值时控制在经济上可行。在该值以下,由于控制而产
生的额外经济支出大于预期的产量损失。如果虫害超过该值,则控制成本至少由预期的额外产量所补偿。
[0021]
根据害虫或病害的性质,损害阈值可能会非常不同。在只有大量支出才能控制害虫或病害,并伴有对进一步生产的不利影响的情况下,损害阈值可能会很高。但是,如果即使是小规模的虫害也可能成为威胁破坏整个生产的传播源,那么损害阈值可能会非常低。
[0022]
为了评估一个区中害虫和/或益虫的存在,使用至少一个成像设备。
[0023]
在第一方面,本发明提供一种成像设备,该成像设备包括:
[0024]
‑
采集区域,
[0025]
‑
成像单元,
[0026]
‑
发送器单元,以及
[0027]
‑
控制单元,
[0028]
其中,所述控制单元被配置为:
[0029]
■
触发所述成像单元,以生成采集区域的图像,以及
[0030]
■
触发所述发送器单元,以将生成的图像和/或关于生成的图像的信息通过网络发送到计算机系统。
[0031]
本发明还提供了一种方法,该方法包括以下步骤:
[0032]
‑
在一个区内设立成像设备,其中该成像设备包括:
[0033]
○
采集区域,
[0034]
○
成像单元,
[0035]
○
发送器单元,以及
[0036]
○
控制单元,
[0037]
‑
生成采集区域的图像,
[0038]
‑
将与图像有关的信息传输到计算机系统,
[0039]
‑
分析传输的信息并生成关于该区内存在的害虫和/或益虫的信息,
[0040]
‑
将关于该区内存在的害虫和/或益虫的信息传输给一个或多个用户。
[0041]
本发明还提供了一种计算机程序产品,该计算机程序产品包括能够加载到计算机的存储器中的计算机程序,该计算机程序在存储器中提示计算机执行以下步骤:
[0042]
‑
从一个区中的至少一个成像设备接收信息,其中该信息涉及从至少一个成像设备的采集区域生成的图像,
[0043]
‑
分析收到的信息,并生成关于该区存在的害虫和/或益虫的信息,
[0044]
‑
将关于该区存在的害虫和/或益虫的信息传输给一个或多个用户。
[0045]
在下文中呈现了本发明的其他主题和优选实施方案。另外,详细地描述了本发明。在这种呈现和描述中,没有在本发明的各个主题之间进行区分。替代地,无论是对哪种情况下做出的描述(成像设备、系统、方法、计算机程序产品),后文的阐述应类比地适用于发明的全部主题。
[0046]
所述采集区域是可以被节肢动物(益虫和/或害虫)找到的区域。其可以是平板或卡片等的平坦表面。其也可以是容器的基座。
[0047]
可以想到的是,本发明的成像设备具有多个采集区域。还可以想到的是,本发明的成像设备具有多种采集区域,例如,用于(特种)害虫的采集区域和用于(特种)益虫的另一
个采集区域。
[0048]
优选地,所述采集区域是具有圆形、卵形、椭圆形、有角的(三角形、四边形、五边形、六边形或大体上n角形,其中n为大于或等于3的整数)横截面的平坦表面。优选地,所述横截面是圆形或矩形(特别是方形)。壁可以从表面向上延伸,从而形成容器。例如,该容器可以呈圆柱形、圆锥形或箱形的形式。优选地,其具有圆形的横截面,并且壁从基座向上锥状延伸,优选地,基座表面和壁表面相对于彼此以大于90
°
且小于120
°
的角度延伸。
[0049]
采集区域可以是用于害虫的诱捕设备的一部分,例如黄色的诱捕盘或可选地粘性的彩色片剂。
[0050]
尤其是当采集区域由容器的基座形成时,优选地在基座区域可以存在至少有一个流出口,例如,使得进入采集区域中的雨水可以通过至少一个流出口流出采集区域。所述流出口可以是基座中的一个或多个开口,或者是邻接基座的壁中的一个或多个开口。可以想到的是,在这样的开口处安装一个水槽,以便引导水以限定的方向流出。如果采集区域是诱捕盘的一部分,则可以存在溢出口。所述溢出口例如可以由诱捕盘的侧壁中的切口形成。优选地,该切口邻近通道,使得雨水可以以定向的方式流走。
[0051]
在一个优选的实施例中,所述采集区域具有平坦的表面,该平坦的表面被布置成使得当本发明的成像设备被定位在基座上或固定到一个区中的植物上时,采集区域相对于水平面具有坡度。水平面垂直于(成90
°
角)重力方向。因此,该平坦的表面被布置成使得其与水平面形成大于零且不大于90
°
的角度。优选地,该平坦的表面被布置为使得其与水平面形成2
°
至88
°
的范围内的角度,优选地,5
°
至80
°
的范围内的角度,甚至更优选地,10
°
至70
°
的范围内的角度。因此,雨水或融水可以毫无问题地从表面流掉。
[0052]
作为吸引剂,所述采集区域可以被配置为吸引特种害虫和/或益虫的颜色(例如,黄色或红色)。除了颜色或替代于颜色,可以存在吸引节肢动物的进一步装置/其他装置(吸引剂)。可以想到的实施例是使用例如模拟食物源的信息素或香味。还可以想到的是在红外线区域、可见光区域和/或紫外线区域使用电磁辐射源来吸引(特种)节肢动物。还可以想到的是使用例如模仿准备交配的雄性和/或雌性的噪音。还可以想到的是使用例如模仿植物的具体图案。
[0053]
优选使用一种或多种吸引剂,所述一种或多种吸引剂至少在设立成像设备和第一次维护之间的时期内达到恒定的效果。由于颜色、图案、形状等作为吸引剂通常在所述时期内保持恒定,因此其相对于可以迅速地挥发掉的信息素具有优势。
[0054]
在使用诱捕盘的情况下,可以填充有水且可选地填充有一种或多种添加剂。这种添加剂例如可以是用于降低表面张力的表面活性剂。这种添加剂也可以是用于吸引(特种)节肢动物的吸引剂。这种添加物也可以是预防藻类形成的装置(例如除草剂)。
[0055]
在卡片或平板的情况下,可以设置有粘合剂,以便使害虫不能移动。在用于益虫的采集区域情况下,优选的是,免除了可能伤害益虫的粘合剂或其他装置。
[0056]
在本发明的成像设备的情况下,优选的是,免除了使节肢动物固定和/或诱捕节肢动物的装置;这意味着成像设备的采集区域优选地没有设置有粘性层,并且该成像设备优选地不具有任何用于诱捕节肢动物的液体。
[0057]
在一个优选实施方案中,该成像设备具有清洁采集区域的装置。可以想到的是,随着时间的推移土壤聚集在采集区域中,这使得难以识别害虫和/或益虫并对其进行计数。这
种清洁装置例如可以是一个或多个喷嘴,压缩空气从一个或多个喷嘴吹到采集区域上,以便吹走土壤。所述清洁装置可以是一个或多个喷嘴,液体(例如水,可选地具有一种或多种添加剂(例如表面活性剂)的水)可以从一个或多个喷嘴喷洒到采集区域上,以便冲走土壤。所述清洁装置可以是致动器,该致动器将采集区域的表面移动或旋转到一侧,以便使土壤从表面掉落。可以想到的是,存在一个振动机构,该振动机构使采集区域前后和/或上下移动,以便移除附着的土壤。可以想到的是,提及的装置中的两种或更多种和/或其他装置相互结合。
[0058]
在一个优选实施方案中,本发明的成像设备包括:容器,该容器包含气体;至少一个喷嘴;以及使气体在至少一个喷嘴的方向上传送离开容器的装置,其中,至少一个喷嘴被定向到采集区域上。气体可以例如在容器中受到压力,并且由于容器内部与环境之间的压力梯度而被驱动离开容器。优选地,所述成像设备包括阀,其中所述阀可以由所述成像设备的控制单元致动,并且所述控制单元被配置为在预定的时间和/或以预定的时间间隔将所述阀打开预定的时间段,和/或在事件发生时,将所述阀打开预定的时间段,使得气体在预定的时间段内从至少一个喷嘴离开并撞击采集区域。所使用的气体例如可以是空气或氮气。
[0059]
在另一优选实施方案中,本发明的成像设备包括:具有液体的容器;至少一个喷嘴;以及使液体在至少一个喷嘴的方向上传送离开容器的装置,其中,至少一个喷嘴被定向到采集区域上。例如,传送液体的装置可以是电驱动的泵。优选地,所述成像设备包括阀,其中所述阀可以由所述成像设备的控制单元致动,并且所述控制单元被配置为在预定的时间和/或以预定的时间间隔将所述阀打开预定的时间段,和/或在事件发生时,将所述阀打开预定的时间段,使得液体在预定的时间段内从至少一个喷嘴离开并撞击采集区域。优选地,所使用的液体是水和/或乙醇。可以向液体中添加表面活性剂,以便增加清洁效果。
[0060]
在一个优选的实施方案中,本发明的成像设备包括振动驱动器。在启动振动驱动器后,振动驱动器将采集区域设定为在预定的时间段内处于振动(例如,前后移动和/或上下移动),优选地具有预定的频率,例如每秒振动5到1000次。优选地,振动驱动器连接至控制单元,并且控制单元被配置为在预定的时间和/或以预定的时间间隔和/或在事件发生时使振动驱动器在预定的时间段内启动,使得振动驱动器将采集区域设定为在预定的时间段内处于振动(例如,前后移动和/或上下移动)。在此,振动幅度例如可以为0.1mm至1cm。
[0061]
在另一优选实施方案中,采集区域被安装为能够旋转。在该实施方案中,本发明的成像设备优选地包括致动器(例如马达),该致动器使采集区域绕一个轴线旋转例如90
°
至180
°
的角度,该轴线优选地穿过可能存在节肢动物的采集区域的表面,然后将其移回起始位置。也可以想到360
°
或不同角度的旋转。优选地,该致动器连接至控制单元,并且控制单元被配置为在预定的时间和/或以预定的时间间隔和/或在事件发生时启动该致动器,使得致动器执行采集区域的一个或多个旋转运动。
[0062]
在一个优选实施方案中,本发明的成像设备的控制单元被配置为从成像单元接收采集区域的一个或多个图像,以分析所述一个或多个图像,并且被配置为在识别到采集区域内的土壤的情况下使上述清洁装置中的一个或多个启动。
[0063]
优选地,本发明的成像设备具有可以将该成像设备定位于地面上或地面中的装置。优选地,所述成像设备可以固定在地面中,以便防止其例如在风暴中倒下。优选地,存在
可以改变地面和采集区域之间距离的装置。这种高度调节器的一个实施例是伸缩杆,所述伸缩杆的一端可以固定在地面中,而采集区域安装在伸缩杆的另一端。高度调节器的另一个实施例是提升平台。这种可变的高度调节器使得能够将采集区域定位在植物上方,使得当飞行昆虫飞过植物时可以识别采集区域并且在降落在采集区域上。可变的高度调节器允许将采集区域的高度(距离地面的距离)调整至生长植物的高度,以便防止周围植物覆盖采集区域。在一个优选实施方案中,所述高度调节器是自动的。优选地,调节所述高度调节器,使得采集区域始终在周围植物上方或位于周围植物的高度。这可以通过距离传感器和/或亮度传感器来实现。
[0064]
在一个优选实施方案中,本发明的成像设备包括植物尺寸传感器,该植物尺寸传感器测量与本发明的成像设备周围的植物的尺寸相关的物理参数。传感器将测量值转换为信号。本发明的成像设备还具有高度调节单元,例如,呈具有偏心轮的马达的形式,其中,偏心轮将马达的旋转运动转换为偏心轮的线性运动。优选地,本发明的成像设备的控制单元连接至传感器和高度调节单元。控制单元被配置为接收来自传感器的信号,将该信号与目标值进行比较,并触发高度调节单元以改变成像设备的高度,直到信号与目标值相对应为止。
[0065]
可以想到的是,本发明的设备具有将其固定在植物上的装置,例如用于固定在细枝或枝条或茎上的钩或环或带。
[0066]
本发明的成像设备还包括一个或多个成像单元。这种成像单元可用于生成数字图像。成像单元包括图像传感器和光学元件。所述图像传感器是一种通过电气装置从光记录二维图像的设备。其通常包括基于半导体的图像传感器,例如ccd传感器(ccd=电荷耦合器件)或cmos传感器(cmos=互补金属氧化物半导体)。所述光学元件(透镜、光阑等)用于使要在图像传感器上生成数字图像的物体的成像清晰度最大化。
[0067]
成像单元被定位成使得整个采集区域或至少部分采集区域在图像传感器上成像。可以想到使用多个成像单元,所述多个成像单元将采集区域的不同区域成像在相应的图像传感器上。在使用多个成像单元的情况下,成像区域至少部分地重叠时是有利的,以便能够在稍后的时刻以更简单的方式从单个图像生成整体图像。
[0068]
优选地,本发明的成像设备具有保持器,成像单元被固定或可以被可逆地固定到所述保持器。优选地,所述保持器与采集区域相距限定且恒定的距离,并且因此确保了图像传感器与采集区域之间的限定且恒定的距离。这便于采集区域的聚焦。
[0069]
可以想到的是,在采集区域的上方安装防止树叶或类似物(土壤)进入所述采集区域的网格或网孔(一般称为屏障)。所述采集区域的侧面优选地保持无阻挡,以便害虫和/或益虫可以从侧面进入采集区域。替代地可以想到的是,网孔的网眼大小或网格的格间距具有使得只有(特种)害虫和/或(特种)益虫能够通过的尺寸;在这种情况下,网孔或网格也可以在侧面区域上延伸。
[0070]
还可以想到的是,在本发明的成像设备专门地用于生成特种害虫的图像的情况下,为这些害虫建立(特种)益虫无法进入的采集区域。这也是可以借助于屏障来实现。所述屏障可以安装在采集区域或容器上,以便通过屏障产生包括与环境隔开的采集区域的内部:特种害虫只能通过屏障进入内部;所述屏障被设计成使得许多益虫不能穿透该屏障,例如因为许多益虫过大。一个可想到的实施例是一个或多个开口,只有尺寸不超过开口最大
尺寸的节肢动物可以通过该开口进入到采集区域。
[0071]
优选地,所述成像单元位于由容器/采集区域和屏障形成的内部中。
[0072]
为了在一个或多个图像传感器上对采集区域进行成像,需要照亮采集区域的光源,使得光(在光谱的红外光、可见光和/或紫外光区域的电磁辐射)被照亮的采集区域在成像单元的方向上散射/反射。出于该目的,可以使用日光。替代地,可以想到使用光照单元,所述光照单元确保了独立于日光的限定的照明方式。优选地,所述光照单元横向地安装在成像单元旁边,使得不会有成像单元的阴影被投射到采集区域上。
[0073]
还可以想到将照明源定位在采集区域的下方和/或采集区域的旁边,该照明源“从下方”和/或“从侧面”照亮所述采集区域,而成像单元“从顶部”产生一个或多个数字图像。当从一个或多个图像中只需要确定存在于采集区域内的节肢动物的数量(或区密度)时,这种布置特别合适;从下方的照明使通常深色的节肢动物相对明亮的照明单元非常突出。然而,这假定了形成采集区域的容器的基座是对于使用的电磁辐射至少部分透明。如果要从一个或多个图像中确定存在的物种,则可能有必要允许光(从上方和/或从侧面)打在节肢动物上并被该节肢动物散射,然后到达图像传感器。
[0074]
可以想到的是,多个照明源从不同方向照亮采集区域。
[0075]
可以想到的是,为照明而发射的光的电磁光谱与特种害虫和/或特种益虫的颜色和/或采集区域的颜色相匹配,以便在节肢动物和所述节肢动物成像的背景之间产生最大的对比度。
[0076]
在一个优选实施方案中,选择采集区域的照明和/或颜色和/或表面特征,使得用于照明的电磁辐射相比于采集区域更显著地被节肢动物所折回(反射或散射)。在一个替代实施方案中,选择采集区域的照明和/或颜色和/或表面特征,使得用于照明的电磁辐射相比于节肢动物更显著地被采集区域所折回(反射或散射)。这两种情况都能确保高对比度。高对比度便于(特种)节肢动物的识别。
[0077]
在一个特别优选的实施方案中,使用以下这样的光谱区域的光:(特种)节肢动物对该光谱区域的光具有相对低的吸收和透射能力但具有高的反射和散射能力。优选地,打在节肢动物上的电磁辐射的绝大部分被节肢动物折回(反射或散射),小部分被吸收或透射。这便于识别存在的物种。
[0078]
优选地,采集区域具有粗糙的表面,以避免日光从采集区域直接反射到图像传感器上。
[0079]
附带地,术语“光照”和“照明”不意味着光谱区域限于可见光(约380nm至约780nm)。同样可以想到的是,使用低于380nm(紫外光:100nm至380nm)或高于780nm(红外光:780nm至1000μm)波长的电磁辐射进行照明。图像传感器和光学元件与所使用的电磁辐射相匹配。
[0080]
本发明的成像设备还包括控制单元。所述控制单元触发至少一个成像单元记录数字图像。图像可以定期或不定期地生成。
[0081]
控制单元可被配置为将记录的图像通信至发送器单元,以便通过无线电网络将记录的图像发送至单独的计算机系统。随后可以在计算机系统上(以自动的方式)查看和/或分析所述图像。
[0082]
替代地可以想到的是,本发明的成像设备具有分析单元,该分析单元被配置为以
自动方式分析生成的图像。该分析可用于确定采集区域中存在的害虫和/或益虫的数量。该分析还可用于识别采集区域中存在的害虫和/或益虫的物种。
[0083]
本发明的成像设备的发送器单元被配置为将关于一个或多个图像的信息通过网络发送至计算机系统。该信息可以是一个或多个图像本身。替代地可以想到的是,该信息是由评估单元分析的结果,即在每种情况下识别的存在的害虫和/或益虫的数量和/或物种。还可以想到的是,如果对至少一个图像的自动分析显示已经识别特种害虫,和/或(特种)害虫的数量已经超过预定的阈值,和/或(特种)益虫的数量已经低于预定的阈值,则发送报警信号。例如,还可以由于存在无法被清洁剂将其从收集区域清除的土壤而触发报警。
[0084]
发送器单元可以被配置为使得其通过移动通信网络(例如gsm:全球移动通信系统,gprs:通用分组无线电服务;umts:通用移动通信系统,lte:长期演进)、通过wlan(无线局域网)、通过蓝牙、通过dect(数字增强型无绳通信)、通过低功耗广域网(lpwan或lpn))、例如窄带iot网络和/或通过不同传输路线的组合来传输信息。
[0085]
在一个优选实施方案中,发送器单元被配置为使得其通过短程(无线电)连接将信息传输至基站,然后信息从基站转移至电缆和/或通过远程无线电连接传递。术语“短程”是指发送器与接收器之间的距离优选地不大于5km,更优选地不大于1km。比指定的最大距离的更大的距离将意味着不再确保从发送器到接收器的数据传输无误。术语“远程”是指发送器和接收器之间的距离优选地大于1km,更优选地大于5km。经由短程连接的通信可以例如借助于无线电、超声波和/或(激光)光来实现。
[0086]
可以想到的是,将生成图像的时间与环境条件相匹配。例如,可以想到将控制单元配置成使得在晚上不创建图像。这样的配置可以例如通过亮度传感器或时间开关来实现。
[0087]
本发明的成像设备还可以包括至少一个存在传感器。
[0088]
本发明的一个优选实施方案是一种成像设备,该成像设备包括:
[0089]
‑
采集区域,
[0090]
‑
成像单元,
[0091]
‑
发送器单元,
[0092]
‑
控制单元,以及
[0093]
‑
传感器,
[0094]
其中,所述传感器配置为:
[0095]
●
检测传感器环境中与节肢动物出现在采集区域中的概率相关的物理属性,以及
[0096]
●
将检测到的属性转换为信号,
[0097]
其中,所述控制单元被配置为:
[0098]
●
触发所述成像单元,以生成采集区域的图像,以及
[0099]
●
触发所述发送器单元,以将图像和/或关于图像的信息通过网络发送到计算机系统,
[0100]
其中,所述控制单元被配置为:
[0101]
●
基于来自传感器的信号,固定生成图像的时间和/或频率,和/或固定将图像和/或关于图像的信息通过网络发送至计算机系统的时间和/或频率。
[0102]
优选地,本发明还提供一种方法,该方法包括以下步骤:
[0103]
‑
在一个区中设立成像设备,其中该成像设备包括:
[0104]
○
采集区域,
[0105]
○
成像单元,
[0106]
○
发送器单元,
[0107]
○
存在传感器,以及
[0108]
○
控制单元,
[0109]
‑
用存在传感器检测采集区域的环境中的物理属性,其中该物理属性与节肢动物出现在采集区域中的概率相关,
[0110]
‑
生成采集区域的图像,以及
[0111]
‑
将图像和/或关于图像的信息通过网络发送到计算机系统,
[0112]
其中根据一种或多种节肢动物出现在采集区域中的概率,固定用于生成采集区域的图像的时间和/或时间频率,和/或用于将图像和/或关于图像的信息通过网络发送至计算机系统的时间和/或时间频率。
[0113]
优选地,本发明还提供一种计算机程序产品,该计算机程序产品包括能够加载到计算机的存储器中的计算机程序,其中该计算机程序产品提示计算机执行以下步骤:
[0114]
‑
接收信号,其中该信号包括关于节肢动物出现在采集区域中的概率的信息,
[0115]
‑
控制采集区域的图像的生成以及将图像和/或关于图像的信息通过网络发送至计算机系统,其中,根据节肢动物出现在采集区域中的概率,固定用于生成采集区域的图像的时间和/或时间频率,和/或用于将图像和/或关于图像的信息通过网络发送至计算机系统的时间和/或时间频率。
[0116]
通常,“传感器”,也称为检测器、(测量参数或测量值)变换器或(测量)传感器,是能够以测量参数的形式,定性地检测或定量地检测特定的物理或化学属性和/或其环境的物理特性的技术部件。这些参数借助于物理或化学效应而被检测,并转化为可进一步处理的信号,通常是电信号或光信号。
[0117]
存在传感器检测其环境中与节肢动物出现在采集区域中的概率相关的物理或化学属性。
[0118]“环境”是指距离存在传感器的最大距离,优选地,距离采集区域不大于10米、更优选地不大于1米、进一步优选地不大于10厘米。
[0119]“相关”是指当物理属性变化时,节肢动物出现在采集区域中的概率变化。当物理属性的值在限定的数值范围内变得更大时,节肢动物出现在采集区域中的概率在此可以变得更大,当物理属性的值在限定的数值范围内变得更小时,节肢动物出现在采集区域中的概率可以变得更小(正相关)。替代地,当物理属性的值在限定的数值范围内变得更大时,节肢动物出现在采集区域中的概率可以变得更小,并且当物理属性的值在限定的数值范围内变得更小时,节肢动物出现在采集区域中的概率可以变得更大(负相关)。相关在数值范围内可以是线性的、或非线性的。优选地,用0.5至1范围内的相关系数来表征相关。优选地,用因果关系来表征相关。
[0120]
存在传感器将代表物理或化学属性的一个或多个值转换为信号。该信号被传输至控制单元。表述“传输”包括控制单元从传感器调用信号的操作,或通常是接收器从发送器调用数据。表述“信号”是指信息从传感器传输到控制单元的信息,由控制单元解释。所述信号可以是模拟信号或数字信号。可以想到的是,存在将多个信号传输至控制单元的多个存
在传感器。
[0121]
信号通常导致控制单元(或通常信号的接收器)动作。
[0122]
在本发明的一个实施方案中,控制单元在至少一个信号的基础上规定成像单元生成采集区域的图像的时间。
[0123]
在本发明的另一实施方案中,控制单元在至少一个信号的基础上规定成像单元生成采集区域的图像的时间频率。
[0124]
在本发明的另一实施方案中,控制单元在至少一个信号的基础上规定成像单元生成采集区域的图像的时间和时间频率。
[0125]
在本发明的另一实施方案中,控制单元在至少一个信号的基础上规定发送器单元将图像和/或关于图像的信息通过网络传输至计算机系统的时间。
[0126]
在本发明的另一实施方案中,控制单元在至少一个信号的基础上规定发送器单元将图像和/或关于图像的信息通过网络传输至计算机系统的时间频率。
[0127]
在本发明的另一实施方案中,控制单元在至少一个信号的基础上规定发送器单元将图像和/或关于图像的信息通过网络传输至计算机系统的时间和时间频率。
[0128]
信号可以包括关于(特种)害虫和/或(特种)益虫出现在采集区域中的概率的信息,和/或该信号可以与(特种)害虫和/或(特种)益虫出现在采集区域中的概率相关。
[0129]
成像单元生成采集区域的图像的时间和/或发送器单元将图像和/或关于图像的信息通过网络传输至计算机系统的时间可以是固定的预定时间,也可以是可被确定的时间,例如某一天的中午12点或一周中的某一天或每天。控制单元可以被配置为使得其基于至少一个信号确定(例如计算)特定时间。还可以想到的是,控制单元被配置为使得其基于至少一个信号从预定时间列表中选择特定的预定时间。还可以想到的是将确定和选择相组合。
[0130]
成像单元生成采集区域的图像的时间和/或发送器单元将图像和/或关于图像的信息通过网络传输至计算机系统的时间也可以由事件触发。例如,可以想到的是,至少一个信号指示限定事件的发生,并且控制单元基于已发生的事件确定和/或选择一个或多个时间。可以想到的是,事件的发生触发生成采集区域的图像,和/或触发将图像和/或关于图像的信息通过网络传输至计算机系统。
[0131]
表述“时间频率”应理解为是指生成图像的速率,和/或将图像和/或关于图像的信息传输至计算机系统的速率。这可以是规律的速率(每天一次、每小时一次、每周一次、每10分钟一次等)或不规律的速率,然而,在不规律的速率的情况下,可以指定平均值(例如,算术平均值)。时间频率也可以假定“零”值;在这种情况下,至少在限定的时间段内(可以通过限定的时间来固定),没有图像生成,和/或没有图像和/或关于图像的信息被传输至计算机系统。
[0132]
例如,存在传感器可以将时间和时间频率的组合固定,例如在5:00时至21:00时之间每10分钟一次,或者当特定的第一事件发生时每小时一次,并且当特定的第二事件发生时每天一次。
[0133]
例如,存在传感器可以是定时器。有一些节肢动物仅在白天或夜晚的特定时间活动。因此,这种节肢动物在白天或夜晚的特定时间在采集区域的概率比白天或夜晚的其他时间大。利用定时器,控制单元可以规定,例如,仅在白天或夜晚的限定时间段内生成图像
counting of mosquitoes,transactions of the asabe,2007年,第50(4)卷:第1481
‑
1485页)。
[0142]
例如,存在传感器可以是光屏障的一部分(优选的是光电二极管或图像传感器)。光屏障是一种识别光束的中断并且将光束的中断指示为电信号的系统。通过这种方式,可以无接触地检测移动的物体。所述光屏障可以被安装成使得其检测进入到采集区域中的节肢动物。所述光屏障可以被安装成使得其检测通过入口得以进入采集区域或进入本发明的成像设备中的节肢动物。术语“光屏障”还包括以多束(平行)光束工作的光栅或光幕。
[0143]
存在传感器可以是相机。该相机可以包括图像传感器和光学元件。所述图像传感器是通过电装置从光记录二维图像的设备。其通常包括基于半导体的图像传感器,例如ccd传感器(ccd=电荷耦合器件)或cmos传感器(cmos=互补金属氧化物半导体)。所述光学元件(透镜、光阑等)用于使将物体成像在图像传感器上的清晰度最大化。所述相机可以被配置为使得采集区域或采集区域的至少一部分在图像传感器上成像。所述图像传感器可由相机的控制单元读取并分析。可以使用图像分析方法和/或机器学习算法来检测采集区域内的(特种)节肢动物的出现。所述相机可以是本发明的成像设备的成像单元,也可以是单独的部件。
[0144]
例如,存在传感器可以是运动传感器。运动传感器是检测其当下环境内的运动并且因此可以作为电子开关工作的电子传感器。运动传感器可以通过电磁波(高频雷达、微波雷达或多普勒雷达)、超声波(超声波运动传感器)来主动地工作,或者像热释电传感器一样通过物体或其环境发出的电磁辐射被动地工作。所述运动传感器可以被配置为使得其检测采集区域中或采集区域的环境中(特种)节肢动物的运动。
[0145]
在一个优选实施方案中,生成图像和/或将图像和/或关于图像的信息传输至计算机系统与(特种)节肢动物出现在采集区域内的概率相匹配。优选地,生成图像的概率和/或通过本发明的成像设备将生成的图像和/或关于生成的图像的信息传输到单独的外部计算机系统的概率,随着(特种)节肢动物出现在采集区域内的概率增长。这具有以下优点:不太需要生成和/或传输没有(特种)节肢动物成像的图像。这具有以下优点:本发明的成像设备消耗较少的能量。这具有以下优点:不需要为了更换电源或给动力源充电而频繁地找到本发明的成像设备。此外,不必查看和/或分析没有描绘(特种)节肢动物的少量图像。
[0146]
在一个优选实施方案中,当至少一个存在传感器检测到(特种)节肢动物(益虫和/或害虫)出现在采集区域内或成像设备的进入区域内时,生成采集区域的一个或多个图像。优选地在时间序列中(例如以1秒、或2秒、或3秒、或4秒、或5秒的间隔或以不同的时间间隔)生成多个图像(例如2个、3个、4个、5个、6个、7个、8个、9个、10个或更多图像)。
[0147]
在另一优选实施方案中,生成采集区域的至少一个图像,并且当至少一个存在传感器检测到(特种)节肢动物(益虫和/或害虫)出现在采集区域内或设备的入口区域内时,将至少一个图像和/或关于所述至少一个图像的信息传输到计算机系统。
[0148]
在另一优选实施方案中,只有当(特种)节肢动物出现在采集区域内的概率超过预定阈值时,才生成采集区域的一个或多个图像,和/或才将图像和/或关于图像的信息传输到计算机系统。例如,所述预定阈值可以是30%或40%或50%或75%或不同的百分比。
[0149]
在一个优选实施方案中,使用多个存在传感器,并且根据来自所述多个存在传感器的信号生成图像,和/或传输图像和/或关于图像的信息。例如,可以想到使用第一存在传
感器(例如,定时器或亮度传感器)来确定是白天还是夜晚。例如,仅在白天或夜晚的特定时间下或特定亮度下生成图像。例如,第二存在传感器可以确定温度。例如,仅在特定的温度范围内生成图像。其他组合是可以想到的。
[0150]
本发明的成像设备具有能量供应单元,以便为电子部件提供电能。优选地,该能量供应单元是移动单元,例如电化学电池(干电池)、蓄电池和/或太阳能电池。特别优选的是可充电蓄电池和太阳能电池的组合,一方面是为了保持低的维护复杂性(不需要更换电池),另一方面是为了即使在几小时日光的情况下也能保证能量供应(纯太阳能电池依赖于最少的太阳能)。
[0151]
可以根据可用于供应本发明的设备的电能的数量来确定生成图像的频率。例如,如果要使用电化学电池(干电池)或必须每年更换/充电一次的可充电蓄电池来完成能源供应,则可以仅创建与一年可用的电能的量一样多的图像。
[0152]
本发明还提供了一种系统,该系统包括
[0153]
‑
一个区中的多个成像设备,其中每个成像设备包括:
[0154]
○
采集区域,
[0155]
○
成像单元,
[0156]
○
发送器单元,以及
[0157]
○
控制单元,
[0158]
其中,所述控制单元被配置为:
[0159]
■
触发成像单元生成采集区域的图像,以及
[0160]
■
触发发送器单元将与图像有关的信息通过网络发送到计算机系统,
[0161]
‑
计算机系统,所述计算机系统被配置为:
[0162]
●
从多个成像设备接收与图像有关的信息,
[0163]
●
分析接收的信息,以获得关于一个分区中存在的害虫和/或益虫的信息,
[0164]
●
将关于分区中存在的害虫和/或益虫的信息传输给一个或多个用户。
[0165]
本发明还提供一种方法,所述方法包括以下步骤:
[0166]
‑
在一个区中设立多个成像设备,其中每个成像设备包括:
[0167]
○
采集区域,
[0168]
○
成像单元,
[0169]
○
发送器单元,以及
[0170]
○
控制单元,
[0171]
‑
生成每个成像设备的采集区域的图像,
[0172]
‑
将与图像有关的信息传输到计算机系统,
[0173]
‑
分析传输的信息并生成关于一个分区内存在的害虫和/或益虫的信息,
[0174]
‑
将关于分区内存在的害虫和/或益虫的信息传输给一个或多个用户。
[0175]
本发明的系统的成像设备优选地分布在一个区上。它们之间的距离通常在10米到10公里之间。它们优选地设立在特定作物(例如,油菜)的田地中,因为这些田地具有特征性的动物群。优选地通过执行本发明来分析生活在特定农作物的田地中的动物群(害虫/益虫)。
[0176]
利用本发明的成像设备,可以分析在设立成像设备的区(例如田地)中存在哪些害
虫/益虫以及多少害虫/益虫。
[0177]
因此,根据本发明,借助于成像设备对害虫和/或益虫进行计数,并确定每种情况下存在的物种。
[0178]
可以想到的是,本发明的成像设备对害虫和益虫都进行计数和识别。替代地,可以想到使用不同的成像设备,其中一种类型的成像设备被设立为识别和确定(特种)害虫的数量,另一种类型的成像设备被设立为识别和确定(特种)益虫的数量。
[0179]
可以想到,根据由其他成像设备所生成的图像分析的结果,调整生成图像的时间和/或将与图像相关的信息通过网络从一个成像设备传递到外部计算机的时间。如果图像分析表明,例如,害虫在某个方向上传播,则可以想到缩短在该方向上用于在成像设备中生成图像的时间间隔(或增加生成图像的时间频率)。
[0180]
因此,本发明的一个优选实施方案是一种系统,该系统包括:
[0181]
‑
一个区中的多个成像设备,其中每个成像设备包括:
[0182]
○
采集区域,
[0183]
○
成像单元,
[0184]
○
发送器单元,
[0185]
○
接收器单元,以及
[0186]
○
控制单元,
[0187]
其中,每个成像设备的控制单元被配置为:
[0188]
■
触发所述成像单元,以生成采集区域的图像,以及
[0189]
■
触发所述发送器单元,以将与图像有关的信息通过网络发送到计算机系统,
[0190]
‑
计算机系统,所述计算机系统被配置为:
[0191]
●
从多个成像设备接收与图像有关的信息,
[0192]
●
分析接收的信息,以获得关于一个分区中存在的害虫和/或益虫的信息,
[0193]
●
当该分区中的害虫和/或益虫的数目或数量以预定方式变化时,向一个或多个成像设备传输消息,
[0194]
其中每个成像设备的接收器单元被配置为接收传输至成像设备的消息,
[0195]
其中每个成像设备的控制单元被配置为基于该消息调整生成图像的时间和/或频率,和/或将图像和/关于图像的信息通过网络发送至计算机系统的时间和/或频率。
[0196]
另一个优选实施方案是一种方法,该方法包括以下步骤:
[0197]
‑
在一个区中设立多个成像设备,其中每个成像设备包括:
[0198]
○
采集区域,
[0199]
○
成像单元,
[0200]
○
发送器单元,以及
[0201]
○
控制单元,
[0202]
‑
生成每个成像设备的采集区域的图像,
[0203]
‑
将与图像有关的信息传输到计算机系统,
[0204]
‑
分析传输的信息并生成关于一个分区中存在的害虫和/或益虫的信息,
[0205]
‑
识别该分区内一种或多种害虫和/或益虫的数量随时间的变化,
[0206]
‑
将关于随时间变化的信息传输到一个或多个成像设备,
[0207]
‑
根据随时间变化的信息,调整生成图像的时间和/或频率,和/或将图像和/或关于图像的信息通过网络发送到计算机系统的时间和/或频率。
[0208]
这种调整例如可以意味着当(特种)益虫和/或(特种)害虫的区域密度增加时,时间频率增加。
[0209]
这种调整可能意味着,例如,根据(特种)益虫和/或(特种)害虫的出现来固定时间,例如,使得白天的特定时间生成图像,因为(特种)益虫和/或(特种)害虫在白天的那些时间活动。
[0210]
在一个优选实施方案中,基于关于在一个相邻的分区中或多个相邻的分区中存在的害虫和/益虫的信息,调整由在限定的分区中的成像设备生成图像的时间和/或时间频率,和/或将图像和/或关于图像的信息发送至计算机系统的时间和/或时间频率。如果在分区中存在(特种)害虫和/或(特种)益虫,则可以在相邻分区中的成像设备中增加生成图像的时间频率,和/或将图像和/或关于图像的信息通过网络发送到计算机的时间频率。
[0211]
还可以想到的是,图像的生成是由远程控制触发的。例如,可以想到,位于远程位置的用户,例如通过通信网络,触发本发明的成像设备以生产数字图像。
[0212]
在特别优选的实施方案中,多个成像设备形成网状,这意味着信息优选地经由短程无线电连接从一个成像设备向前传递到另一成像设备。一个成像设备最终位于基站附近,或者具有在比形成网状的各个成像设备之间的距离更大的距离上传递信息的装置。基站优选地将信息通过远程无线电连接(例如,移动通信网络)和因特网发送到计算机系统。可以从有关此主题的大量文献中获取网状构造的详细信息(例如,参见g.agg
é
lou:wireless mesh networking,mcgraw
‑
hill 2009,doi10.1036/0071482563;y.zhang et al.:wireless mesh networking,auerbach publications 2007,isbn:0
‑
8493
‑
7399
‑
9)。
[0213]
因此,本发明的一个优选实施方案是一种系统,该系统包括:
[0214]
‑
至少一个基站,
[0215]
‑
计算机系统,
[0216]
‑
一个区中的第一成像设备,以及
[0217]
‑
该区中的第二成像设备,
[0218]
‑
其中该第一成像设备包括:
[0219]
○
采集区域,
[0220]
○
成像单元,
[0221]
○
发送器单元,以及
[0222]
○
控制单元,
[0223]
‑
其中该第二成像设备包括:
[0224]
○
采集区域,
[0225]
○
成像单元,
[0226]
○
发送器单元,
[0227]
○
接收器单元,以及
[0228]
○
控制单元,
[0229]
其中,所述第一成像设备的控制单元被配置为:
[0230]
‑
触发第一成像设备的成像单元,以生成第一成像设备的采集区域的第一图像,
[0231]
‑
触发第一成像设备的发送器单元,以将第一图像和/或关于第一图像的信息通过短程无线电连接传输至第二成像设备,
[0232]
其中,所述第二成像设备的控制单元被配置为:
[0233]
‑
触发第二成像设备的接收单元接收第一图像,
[0234]
‑
触发第二成像设备的成像单元,以生成第二成像设备的采集区域的第二图像,
[0235]
‑
触发第二成像设备的发送器单元,以将第一图像和第二图像和/或关于第一图像和第二图像的信息通过短程无线电连接传输至基站,
[0236]
其中,所述基站被配置为:
[0237]
‑
接收第一图像和第二图像,并将第一图像和第二图像通过远程无线电连接传递到计算机系统,
[0238]
其中,所述计算机系统被配置为:
[0239]
●
接收传递的图像,
[0240]
●
分析传递的图像,以获得关于该区中存在的害虫和/或益虫的信息,
[0241]
●
将关于该区中存在的害虫和/或益虫的信息传输给一个或多个用户。
[0242]
本发明的另一优选实施方案是一种方法,该方法包括以下步骤:
[0243]
‑
在一个区中设立多个成像设备,其中每个成像设备包括:
[0244]
○
采集区域,
[0245]
○
成像单元,
[0246]
○
发送器单元,
[0247]
○
接收器单元,以及
[0248]
○
控制单元,
[0249]
‑
借助于第一成像设备的成像单元生成第一成像设备的采集区域的第一图像,
[0250]
‑
将该第一图像从第一成像设备通过短程无线电连接传输至第二成像设备,
[0251]
‑
借助于第二成像设备接收第一图像,
[0252]
‑
借助于第二成像设备的成像单元生成第二成像设备的采集区域的第二图像,
[0253]
‑
将第一图像和第二图像从第二成像设备通过短程无线电连接传输至基站,
[0254]
‑
将第一图像和第二图像通过包括远程无线电连接的网络从基站传输至计算机系统,
[0255]
‑
借助于计算机系统分析第一图像和第二图像,并且生成关于该区中存在的害虫和/或益虫的信息,
[0256]
‑
将关于该区中出现的害虫和/或益虫的信息传输至一个或多个用户。
[0257]
在一个优选的实施方案中,一个或多个植物分析设备是本发明的系统的组成部分。像成像设备一样,植物分析设备包括成像单元(具有图像传感器和光学元件)、发送器单元和控制单元。所述植物分析设备用于分析正在生长的植物的状况(特别是农作物的状况,但也包括牺牲植物和/或保护性植物),并可选地用于识别和评估由害虫引起的损害。例如,可以以固定的方式将这样的植物分析设备设立在农作物的田地中,并在那里被引导到农作物的部分上(叶、花、茎、子实体和/或类似物),以便产生这些部分的图像。还可以想到的是植物分析设备是一种移动设备,例如(无人驾驶的)车辆或(无人驾驶的)飞机(无人机),其在田地内或田地上方移动并生成正在生长的植物的图像。图像可以会定期或不定期地生
成。它们可以以限定的时间记录。可以想到将生成图像的时间与环境条件相匹配。可以想到的是,将图像生成的时间与由成像设备和/或其他植物分析设备生成的图像的分析结果相匹配。可以想到,是由远程控制触发图像的生成。可以检查图像是否存在损坏(优选是由咬食造成的损坏)。与图像有关的信息由植物分析设备传输到计算机系统。传输的信息可以是图像本身和/或图像的一种或多种分析的结果。可以对图像进行分析,以确定正在生长的植物的发育状态(例如,通过bbch代码)。可以对图像进行分析,以确定正在生长的植物的健康状态(例如,缺陷)。
[0258]
优选地,每个成像设备和/或每个植物分析设备被分配一个位置。这通常是相应的设备生成图像的位置。替代地,该位置可以是设备的环境内的位置(例如,相应设备通过无线电连接所连接到基站的位置),或者该位置可以是模糊的,例如,指定存在该设备的地球表面上的区域(呈具有限定半径的圆形的形式)。
[0259]
在一个优选实施方案中,本发明的系统具有确定设备的位置的装置。
[0260]
可以想到的是,所述设备(成像设备和/或任何植物分析设备)具有gps传感器(gps:全球定位系统)或另一种全球卫星导航系统的传感器(gnss),通过所述传感器可以确定设备的位置。
[0261]
借助于全球卫星导航系统确定位置的一个优点是高精确度。缺点为附加的部件成本和相对高的能量需求。
[0262]
还可以想到的是,借助于与本发明的设备的发送器单元连接的无线电小区来确定位置。与确定位置相比,该解决方案通常具有较低的精确度,但这意味着更低的部件成本和更低的能量需求。
[0263]
在移动通信中,确定位置最简单的方法是基于以下事实:已知发送器单元所在的小区。例如,由于打开的移动电话与基站相连,因此移动电话的位置可以被分配到至少一个移动通信小区(小区id)。类比地,本发明的设备也可以这样进行。
[0264]
在gsm(全球移动通信系统)的帮助下,发送器单元的位置可以精确地确定至几百米内。在城镇,该位置可以精确地确定至100至500米;在农村地区(基站密度较低),半径可以增加到10公里或以上。如果将该信息通过小区id与ta参数(ta:时间提前量)结合,则可以提高精度。该值越高,发送器单元距基站的距离越大。通过eotd方法(eotd:加强型观测时差)可以更精确地定位发送器单元。所述eotd方法确定了发送器单元与多个接收器单元之间信号的渡越时间差。
[0265]
在一个实施方案中,借助于sigfox网格来查明信息和确定位置。sigfox是一种低功耗广域网(lpwan),并且是为小数据包和非常节能的操作而具体设计的。sigfox基站可以进行远距离通信,而不中断。单个基站(可以控制多达100万个发送器单元)的范围在高人口密度的区为3公里至5公里,在农村区为30公里至70公里。在使用sigfox的情况下,数据包被发送器区域内的所有基站接收。这可以用来确定发送器单元的位置。
[0266]
还可以想到的是,在注册时检测本发明的设备的位置。在这种情况下,注册的一个步骤是将设备和位置关联。可以想到的是,用户借助于移动计算机系统(例如,智能手机或平板电脑等)检测设备的明确标识符,并且将其与位置信息关联。当设备注册时,该明确标识符用于识别设备。所述明确标识符可以是安装在设备上或记录在设备的数据存储装置内的数字或字母数字代码或二进制代码等。例如,明确标识符可以通过输入设备(例如键盘、
触摸屏、麦克风(通过语音输入)等)输入到移动计算机系统中而被检测到。优选地,所述明确标识符采用光学可读代码的形式(例如条形码或矩阵代码等)或采用可通过无线电读取的电子存储装置的形式(例如呈rfid标签形式)等。这具有以下优点:通过移动计算机系统能够自动地读取明确标识符,并且避免了输入错误(如在用户使用键盘输入的情况下)。例如,可以用是移动计算机系统的一部分的相机来检测光学代码。在进一步的步骤中,确定位置。可以想到的是,确定位置的装置是通过用户的移动计算机系统提供的。例如,该移动计算机系统可以是智能手机,智能手机通过与智能手机连接的无线电小区或与智能手机相关联的gps传感器来确定位置。
[0267]
如果检测到明确标识符并且确定了位置,则将这些信息片段相互关联。该关联将一个位置分配给设备。可以想到的是,将所述关联的信息通过网络传输到外部计算机系统并存储在所述计算机系统中。还可以想到的是,所述关联的信息被存储在用户的移动计算机系统上。
[0268]
在注册时,优选地将设备的明确标识符与用户的明确标识符额外地关联起来,使得将具有限定位置的单个设备(或多个设备)分配给用户。作为这种关联的结果,优选地,用户能够仅从分配给用户的设备接收图像。
[0269]
由存在的设备(图像设备和可选地植物分析设备)借助于对应的发送器单元传输到计算机系统的信息可以在计算机系统中被处理、分析、存档和/或发给用户。
[0270]“计算机系统”是用于电子数据处理的系统,其借助于可编程的计算法则处理数据。这样的系统通常包括“计算机”、包括用于执行逻辑操作的处理器的单元,以及外围装置。
[0271]
在计算机技术中,“外围装置”是指连接到计算机并且用于控制计算机和/或作为输入和输出设备的所有设备。其例子有显示器(屏幕)、打印机、扫描仪、鼠标、键盘、驱动器、相机、麦克风、扬声器等。内部端口和扩展卡也被认为是计算机技术中的外围装置。
[0272]
当今的计算机系统经常被分为台式pc、便携式pc、膝上型轻便电脑、笔记本电脑、上网本和平板pc以及所谓的掌上装置(例如智能手机);所有这些系统都可以被用来执行本发明。
[0273]
通过输入设备(例如,键盘、鼠标、麦克风和/或类似设备)对计算机系统进行输入。“输入”也应理解为是指从虚拟菜单或虚拟列表中选择条目或点击选择框等。
[0274]
本发明的系统通常具有多个(至少10个,优选地20个以上)被分配至计算机系统的成像设备和可选地植物分析设备(统称为设备)。
[0275]
所述设备和计算机系统通过网络相互连接,使得所述设备可以将信息(数据、图像、状态信息、传感器数据等)传输至计算机系统。也可以想到的是,本发明的系统被配置为使得计算机系统可以向设备传输信息或控制命令。用于将计算机系统和所述设备相互连接的网络至少部分地是无线电网络。通常,信息从设备由发送器单元通过无线电传输至基站,信息从基站通过无线电和/或通过电缆继续(可选地通过其他的站)传递至计算机系统。
[0276]
本发明的系统被配置为使得对应的设备(在一个位置处设立或激活)自动地生成图像。
[0277]
在本发明的一个实施方案中,所述设备将生成的图像传输至计算机系统。传输的图像在计算机系统上进行分析;这涉及确定在采集区域内存在的害虫和/或益虫的数量、识
别存在的物种,在存在一个或多个植物分析设备的情况下,检查图像关于植物的状态和/或存在的损害,并且如果适当,则确定损害的水平。
[0278]
在替代的实施方案中,生成的图像由相应的设备中的评估单元进行分析。例如,可以确定在采集区域内存在的害虫/益虫的数量。然后,可以将该数量传输至计算机系统。可以识别存在的物种。然后,可以将物种的名称传输至计算机系统。可以确定种植的植物的状态。然后将该状态传输至计算机系统。可以想到的是,生成的图像同样可以传输至计算机系统。可以想到的是,将生成的图像与相应的设备中的分析结果一并传输至计算机系统。可以想到的是,只有在用户提出请求后,才将生成的图像传输至计算机系统。
[0279]
对已经由图像设备生成的图像的分析可用于确定图像中的生物体是有害生物体、害虫、益虫或对农作物的生长没有意义的生物体。因此,识别可能意味着分配到三个类别:“有害”、“有益”和“中性”。优选地,对害虫的识别用来识别可以针对该害虫而采取的措施。例如,要采取的措施可以是应用特定的害虫控制手段。
[0280]
替代地,识别可以理解为是指将单个害虫/益虫分配至一个分类单元,即出于生物分类学的目的,将其分配给类、目、超科、科、亚科、族、属、种、亚种或分配给中间阶段。
[0281]
在益虫的识别中,其目的可能是识别以分区内存在的害虫作为食物源或寄主的那些益虫。
[0282]
优选地,害虫/益虫的识别和计数是自动的。这意味着用户不必自己计数和识别图像内的节肢动物;替代地,相应的图像被计算机系统的工作存储器内的计算机程序发送至图像处理算法和图像识别算法。在这些算法的帮助下,图像被分析并且可选地被准备(过滤和类似的操作),并且提取出允许对出现的节肢动物的数量和节肢动物的物种做出结论的特征。现有技术中描述了这样的算法。
[0283]
可以想到使用已经事先在众多已知害虫/益虫图像上训练过的人工神经网络来识别害虫/益虫。
[0284]
优选地使用其他信息来识别害虫/益虫。例如,可以利用位置信息(例如,地理位置)。例如,如果相应的成像设备在德国,则与成像设备例如在巴西时相比,应考虑不同的害虫/益虫。当前的季节也是可以利用的重要信息片段。根据季节,可以出现不同的害虫/益虫。还可以由正在种植的植物(农作物、保护植物、牺牲计划)来提供有关害虫/益虫有害生物体的信息。
[0285]
由至少一个植物分析设备生成的图像分析也是自动的。优选地使用人工智能算法,更优选地是自学习系统。这些算法能够根据特定特征,例如叶大小,叶形状,叶的数目、开花的存在、开花的形状和大小等来确定正在生长的植物的发育状态。对植物或植物部分的损害,特别是由于咬食引起的损害,以及损害的程度同样可以自动方式识别和量化为相对于正常状态的变异。
[0286]
可以想到的是,本发明的系统包括两个计算机系统(第一计算机系统和第二计算机系统)。第一计算机系统是服务器,其通过网络与设备连接(成像设备和可选地植物分析设备)。所述服务器接收由所述设备传输的所有信息(例如图像、分析结果、状态信息等)。所述信息可以在服务器上进行分析和存档。例如,可以在服务器上对图像进行分析。第二计算机系统(客户端)连接至第一计算机系统(服务器),并且可以请求信息(图像、分析结果等)。所述第二计算机系统通常由终端用户(例如农民)操作,例如,该农民已经在他的一个农业
利用田地中设立了一个或多个设备,并且希望进行虫害检查。随后,该第一计算机系统(服务器)通常由图像分析工具的操作者来操作和管理。用户能够使用来自不同终端用户的众多图像,从而不断改进用于对害虫/益虫计数和/或用于识别物种和/或用于分析损失的算法。优选地,所述系统被配置为使得所述第二计算机系统的用户仅接收来自第一计算机系统的图像,而所述图像来自该用户注册的成像设备和/或植物分析设备。
[0287]
在一个优选实施方案中,对一个或多个设备(成像设备和/或植物分析设备)具有注册访问权限的用户可以允许对其他设备具有注册访问权限的用户们访问图像,这被该用户注册的设备所允许。
[0288]
因此,本发明的一个优选实施方案是一种系统,该系统包括:
[0289]
‑
由第一用户使用的第一计算机系统,
[0290]
‑
由第二用户使用的第二计算机系统,
[0291]
‑
一个区中的至少一个第一成像设备和至少一个第二成像设备,
[0292]
其中所述第一成像设备注册到第一用户,
[0293]
其中所述第二成像设备注册到第二用户,
[0294]
其中所述第一成像设备和第二成像设备分别包括:
[0295]
○
采集区域,
[0296]
○
成像单元,
[0297]
○
发送器单元,以及
[0298]
○
控制单元,
[0299]
其中,所述第一成像设备的控制单元被配置为:
[0300]
■
触发第一成像设备的成像单元,以生成第一成像设备的采集区域的图像,以及
[0301]
■
触发所述发送器单元,以将图像和/或关于该图像的信息通过网络发送至第三计算机系统,
[0302]
‑
第三计算机系统,所述第三计算机系统通过网络连接至所述第一计算机系统和第二计算机系统,并且所述第三计算机系统被配置为:
[0303]
●
接收图像和/或关于图像的信息,
[0304]
●
分析接收到的图像和/或信息,以获得关于一个分区中存在的害虫和/或益虫的信息,
[0305]
●
将关于该分区中存在的害虫和/或益虫的信息传输给第一用户,
[0306]
其中所述第一计算机系统被配置为:
[0307]
●
从第一个用户接收允许命令,
[0308]
●
响应于该允许命令向第三计算机系统发送一条允许消息,
[0309]
其中所述第三计算机系统被配置为:
[0310]
●
接收允许命令,
[0311]
●
响应于允许命令,赋予第二用户对图像和/或关于图像的信息的访问权限,使得第二用户能够借助于第二计算机系统从第三计算机系统调用图像和/或关于图像的信息。
[0312]
本发明的一个优选实施方案是一种方法,该方法包括以下步骤:
[0313]
‑
在一个区中设立第一成像设备和第二成像设备,
[0314]
其中所述第一成像设备注册到第一用户,
[0315]
其中所述第二成像设备注册到第二用户,
[0316]
其中所述第一成像设备包括:
[0317]
○
采集区域,
[0318]
○
成像单元,
[0319]
○
发送器单元,以及
[0320]
○
控制单元,
[0321]
‑
借助于第一成像设备的成像单元生成第一成像设备的采集区域的图像,
[0322]
‑
将所述图像通过网络传输至计算机系统,
[0323]
‑
借助于计算机系统分析所述图像,并且生成关于一个分区中存在的害虫和/或益虫的信息,
[0324]
‑
将关于该分区中存在的害虫和/或益虫的信息传输至第一用户,
[0325]
‑
借助于计算机系统接收来自第一用户的允许指令,
[0326]
‑
将关于该分区中存在的害虫和/或益虫的信息传输至第二用户。
[0327]
在一个优选实施方案中,分析由各种设备传输到计算机系统的信息,以确定(特种)害虫/益虫的传播方向。例如,可以想到的是,首先通过第一成像设备检测害虫物种/益虫物种,并且在随后的时刻,通过第二成像设备检测相同的害虫物种/益虫物种。由此可以得出结论,对应的害虫物种/益虫物种从第一成像设备向第二成像设备的方向传播。给定多个成像设备,可以对害虫物种/益虫物种的传播方向做出更精确的陈述。
[0328]
因此,本发明的优选实施方案是一种系统,该系统包括:
[0329]
‑
一个区中的多个成像设备,其中每个成像设备包括:
[0330]
○
采集区域,
[0331]
○
成像单元,
[0332]
○
发送器单元,以及
[0333]
○
控制单元,
[0334]
其中,所述控制单元被配置为:
[0335]
■
触发所述成像单元,以生成采集区域的图像,以及
[0336]
■
触发所述发送器单元,以将关于图像的信息通过网络发送至计算机系统,
[0337]
‑
计算机系统,所述计算机系统被配置为:
[0338]
●
接收来自多个成像设备的关于图像的信息,
[0339]
●
分析接收到的信息,以获得关于多个成像设备的采集区域中存在的(特种)害虫和/或(特种)益虫的数量的信息,
[0340]
●
将各个成像设备的采集区域中存在的(特种)害虫和/或(特种)益虫的数量进行比较,并找出数量的差异,
[0341]
●
利用数量的差异来计算特种害虫和/或特种益虫的传播方向,以及
[0342]
●
将该传播方向传达给一个或多个用户。
[0343]
本发明的一个优选实施方案是一种方法,该方法包括以下步骤:
[0344]
‑
在一个区中设立多个成像设备,其中每个成像设备包括:
[0345]
○
采集区域,
[0346]
○
成像单元,
[0347]
○
发送器单元,以及
[0348]
○
控制单元,
[0349]
‑
生成每个成像设备的采集区域的图像,
[0350]
‑
将关于图像的信息传输至计算机系统,
[0351]
‑
分析传输的信息,并生成关于一个分区中存在的害虫和/或益虫的信息,
[0352]
‑
确定各个成像设备的采集区域中存在的害虫和/或益虫的数量的差异,
[0353]
‑
计算该区或分区中害虫和/或益虫的传播方向,
[0354]
‑
将关于害虫和/或益虫的传播方向的信息传输至一个或多个用户。
[0355]
此外,在一个优选实施方案中,从多个成像设备的图像中确定害虫/益虫或特种害虫/益虫的传播速度。
[0356]
在一个优选实施方案中,使用确定的传播方向和确定的传播速度,可以做出预报,该预报指出害虫/益虫(或有害物种/有益物种)何时会到达其他区域(田地、区)。
[0357]
在一个优选实施方案中,将天气数据(当前天气、前几天的天气、接下来几天的天气预报)纳入到传播方向和传播速度的预测中。
[0358]
通常会创建未来1到20天的时间段内的预报,更优选是未来1到10天的时间段的预报。
[0359]
在一个优选实施方案中,在具有一个或多个成像设备的田地内,识别采集区域内存在的节肢动物。在下一步骤中,分析在所识别的节肢动物中是否存在害虫以及害虫所对应的以所识别的害虫为食物或宿主的益虫。如果存在这样的益虫和/或害虫,则确定它们的数量。对这些数量进行对比,以便观察是否仅靠益虫就能防止害虫不受控制的繁殖和/或传播。优选地,彼此关联地表示所述数量。将害虫数量与对应的益虫数量的比值与通过经验确定的阈值进行比较。如果该比值小于阈值,则预期不会发生害虫不受控制的繁殖和/或传播。如果该比值大于阈值,则应采取措施以避免产量损失。比较的结果可以显示给用户,优选地,显示给所述讨论的田地的农民。优选地,额外地向用户推荐一种控制害虫的措施。对于该建议,可以指出作物保护产品(例如杀虫剂)的名称、要部署的作物保护产品的量、部署作物保护产品的有利时期等。
[0360]
因此,本发明的一个优选实施方案是一种系统,该系统包括:
[0361]
‑
一个区中的至少一个成像设备,其中所述至少一个成像设备包括:
[0362]
○
采集区域,
[0363]
○
成像单元,
[0364]
○
发送器单元,以及
[0365]
○
控制单元,
[0366]
其中,所述控制单元被配置为:
[0367]
■
触发所述成像单元,以生成采集区域的图像,以及
[0368]
■
触发所述发送器单元,以将关于图像的信息通过网络发送至计算机系统,
[0369]
‑
计算机系统,所述计算机系统被配置为:
[0370]
●
接收来自所述至少一个成像设备的关于图像的信息,
[0371]
●
分析接收到的信息,以获得关于一个分区中存在的(特种)害虫和(特种)益虫的信息,
[0372]
●
计算该分区中存在的(特种)害虫的数量与该分区中存在的(特种)益虫的数量的比值,
[0373]
●
将该比值与阈值进行比较,如果该比值超过阈值,则向一个或多个用户传输该比值已经超过的消息。
[0374]
本发明的另一优选实施方案是一种方法,该方法包括以下步骤:
[0375]
‑
在一个区中设立多个成像设备,其中每个成像设备包括:
[0376]
○
采集区域,
[0377]
○
成像单元,
[0378]
○
发送器单元,以及
[0379]
○
控制单元,
[0380]
‑
生成每个成像设备的采集区域的图像,
[0381]
‑
将关于所述图像的信息传输至计算机系统,
[0382]
‑
分析传输的信息,并且生成关于一个分区中存在的(特种)害虫和(特种)益虫的信息,
[0383]
‑
计算该分区中存在的(特种)害虫的数量与该分区中存在的(特种)益虫的数量的比值,
[0384]
‑
将该比值与阈值进行比较,
[0385]
‑
如果该比值超过阈值,则向一个或多个用户传输该比值已经超过的消息。
[0386]
在另一优选实施方案中,在借助于一个或多个成像设备的田地内,识别采集区域内存在的节肢动物。在下一步骤中,分析在所识别的节肢动物中是否存在害虫和益虫。如果存在这样的益虫和/或害虫,则确定它们的数量。例如,如果存在(特种)害虫,则可以通过查询存储了针对多种(特种)害虫的用于控制(特种)害虫的控制手段的数据库,来找出一种或多种控制手段来控制存在的(特种)害虫。例如,如果存在(特种)益虫,则可以通过查询存储了针对多种(特种)益虫的多种控制手段对(特种)益虫的影响的数据库,以确定找出的用于控制存在的(特种)害虫的控制手段对存在的(特种)益虫的影响。找出的控制手段和确认的对存在的益虫的效果可以显示给用户。然后,用户可以选择例如对存在的(特种)益虫具有最小影响的控制手段。
[0387]
例如使用模型,还可以计算出控制害虫(例如使用杀虫剂)对益虫的影响。还可以计算出对益虫的不利影响是否胜过控制害虫的积极影响。如果对益虫的不利影响占主导,则可以建议不要控制害虫和/或增加间隔时间。
[0388]
因此,本发明的一个优选实施方案是一种系统,该系统包括:
[0389]
‑
一个区中的至少一个成像设备,其中所述至少一个成像设备包括:
[0390]
○
采集区域,
[0391]
○
成像单元,
[0392]
○
发送器单元,以及
[0393]
○
控制单元,
[0394]
其中,所述控制单元被配置为:
[0395]
■
触发所述成像单元,以生成采集区域的图像,以及
[0396]
■
触发所述发送器单元,以将关于图像的信息通过网络发送至计算机系统,
[0397]
‑
计算机系统,所述计算机系统被配置为:
[0398]
●
接收来自所述至少一个成像设备的关于图像的信息,
[0399]
●
分析接收到的信息,以获得关于一个分区中存在的(特种)害虫和(特种)益虫的信息,
[0400]
●
利用关于该分区中存在的(特种)害虫的信息来识别用于控制(特种)害虫的一种或多种控制手段,
[0401]
●
确定所确定的一种或多种控制手段对该分区中存在的(特种)益虫的影响,
[0402]
●
将关于识别到的一种或多种控制手段的信息和关于识别到的一种或多种控制手段对该分区中存在的(特种)益虫的影响的信息传输至一个或多个用户。
[0403]
本发明的一个优选实施方案也是一种方法,该方法包括以下步骤:
[0404]
‑
在一个区中设立多个成像设备,其中每个成像设备包括:
[0405]
○
采集区域,
[0406]
○
成像单元,
[0407]
○
发送器单元,以及
[0408]
○
控制单元,
[0409]
‑
生成每个成像设备的采集区域的图像,
[0410]
‑
将关于图像的信息传输至计算机系统,
[0411]
‑
分析传输的信息,并生成关于一个分区中存在的(特种)害虫和(特种)益虫的信息,
[0412]
‑
利用关于该分区中存在的(特种)害虫的信息识别用于控制(特种)害虫的一种或多种控制手段,
[0413]
‑
确定所确定的一种或多种控制手段对该分区中存在的(特种)益虫的影响,
[0414]
‑
将关于识别到的一种或多种控制手段的信息和关于识别到的一种或多种控制手段对该分区中存在的(特种)益虫的影响的信息传输至一个或多个用户。
[0415]
在一个优选实施方案中,确定一个分区中的特种害虫的虫害密度。确定是否已超过损害阈值。在确定是否已经超过损害阈值时,优选地考虑与植物状态有关的信息(植物的健康、发育阶段、预期产量)。在确定是否已经超过损害阈值时,优选地考虑与存在益虫相关的信息(存在益虫的物种和数量)。将结果显示给该分区的农民。如果已经超过了损害阈值,则建议农民可以采取措施来减少预期的损害。
[0416]
因此,本发明的一个优选实施方案是一种系统,该系统包括:
[0417]
‑
一个区中的至少一个成像设备,其中所述至少一个成像设备包括:
[0418]
○
采集区域,
[0419]
○
成像单元,
[0420]
○
发送器单元,以及
[0421]
○
控制单元,
[0422]
其中,所述成像设备的控制单元被配置为:
[0423]
■
触发所述成像单元,以生成采集区域的图像,以及
[0424]
■
触发所述发送器单元,以将关于图像的信息通过网络发送至计算机系统,
[0425]
‑
该区中的至少一个植物分析设备,其中所述至少一个植物分析设备包括:
[0426]
○
成像单元,
[0427]
○
发送器单元,以及
[0428]
○
控制单元,
[0429]
其中,所述植物分析设备的控制单元被配置为:
[0430]
■
触发至少一个成像单元,以生成一个或多个植物的图像,以及
[0431]
■
触发所述发送器单元,以将关于图像的信息通过网络发送至计算机系统,
[0432]
‑
计算机系统,所述计算机系统被配置为:
[0433]
●
接收来自所述至少一个成像设备的关于图像的信息,
[0434]
●
分析从所述至少一个成像设备接收到的信息,以获得关于一个分区的一种或多种(特种)害虫的虫害密度,
[0435]
●
接收来自所述至少一个植物分析设备的关于图像的信息,
[0436]
●
分析从所述至少一个植物分析设备接收到的信息,以确定关于给该分区中的植物所造成的损害的信息,
[0437]
●
利用虫害密度和给该分区中的植物所造成的损害来确定是否已经超过损害阈值,
[0438]
●
如果已经超过损害阈值,则将关于已经超过损害阈值的信息传输至一个或多个用户。
[0439]
本发明的一个优选实施方案也是一种方法,该方法包括以下步骤:
[0440]
‑
在一个区中设立至少一个成像设备和至少一个植物分析设备,其中所述成像设备包括采集区域,
[0441]
‑
借助于成像设备生成采集区域的第一图像,
[0442]
‑
借助于植物分析设备生成该区中的植物的第二图像,
[0443]
‑
将所述第一图像和/或关于第一图像的信息通过网络传输至计算机系统,
[0444]
‑
将所述第二图像和/或关于第二图像的信息通过网络传输至计算机系统,
[0445]
‑
分析所述第一图像和/或关于第一图像的信息,并确定一个分区中的(特种)害虫的虫害密度,
[0446]
‑
分析所述第二图像和/或关于第二图像的信息,并生成关于给该分区中的植物造成的损害的信息,
[0447]
‑
根据虫害密度和给该分区中的植物造成的损害确定是否已经超过损害阈值,
[0448]
‑
如果已经超过损害阈值,则将关于超过损害阈值的消息传输至一个或多个用户。
[0449]
在很多分区,为了增加生物多样性,种植与农作物田地邻接的绿色边界。可以想到的是,农民希望验证绿色边界的有效性和/或向官方机构证明。因此,在优选实施方案中,借助于分区内存在的成像设备,确定发生在该分区内的益虫的数量和物种,或确定一个或多个限定的益虫物种的数量。所确定的数据用于确定一个或多个益虫物种的区密度(例如,每公顷的益虫物种的数量)。该区密度被传输并且显示给该区的农民和/或官方机构。
[0450]
因此,本发明的优选实施方案是一种系统,该系统包括:
[0451]
‑
一个区中的至少一个成像设备,其中,所述至少一个成像设备包括:
[0452]
○
采集区域,
[0453]
○
成像单元,
[0454]
○
发送器单元,以及
[0455]
○
控制单元,
[0456]
其中,所述成像设备的控制单元被配置为:
[0457]
■
触发所述成像单元,以生成采集区域的图像,并
[0458]
■
触发所述发送器单元,以将与图像有关的信息通过网络发送到计算机系统,
[0459]
‑
计算机系统,所述计算机系统被配置为:
[0460]
●
接收来自至少一个成像设备的与图像有关的信息,
[0461]
●
分析从至少一个成像设备接收到的信息,以获得关于一个分区中存在的(特种)益虫的信息,
[0462]
●
将关于一个分区中存在的(特种)益虫的信息传输给一个或多个用户。
[0463]
本发明的一个优选实施方案也是一种方法,其包括以下步骤:
[0464]
‑
在一个区中设立多个成像设备,其中每个成像设备包括:
[0465]
○
采集区域,
[0466]
○
成像单元,
[0467]
○
发送器单元,以及
[0468]
○
控制单元,
[0469]
‑
生成每个成像设备的采集区域的图像,
[0470]
‑
将与图像有关的信息传输到计算机系统,
[0471]
‑
分析传输的信息并生成关于一个分区中存在的(特种)益虫的信息,
[0472]
‑
将关于一个分区中存在的(特种)益虫的数量的信息传输给一个或多个用户。
[0473]
如果借助于包括本发明的多个成像设备的本发明的系统检测(特种)害虫,并且在多个成像设备的设立位置处一种或多种(特种)害虫的虫害密度已经超过,则可以在该处对(特种)害虫进行协同控制。“协同”是指控制以平衡的方式进行。优选地,在相同(限定的)时间段内应用一种或多种控制手段。协同控制更为有效,并降低了对所用控制手段产生阻力的风险。例如,可以如下进行协同控制:在定位成像设备的各个位置处确定与(特种)害虫有关的虫害密度。如果在多个位置处超过了与一种(特种)害虫有关的损害阈值,则识别多个位置处的对应成像设备的用户。这可以通过查询数据库来完成。然后联系用户,并向他们提供有关他们应在何时针对(特种)害虫部署(特定的)控制手段以及以何种数量的信息。可替代地,可以由服务提供商来进行部署,该服务提供商在已经超过损害阈值的所有那些位置处部署控制手段。也可以考虑使用无人机或机器人或自主的农业机械来部署控制手段。
[0474]
因此,本发明的一个优选实施方案是一种系统,该系统包括:
[0475]
‑
一个区中的不同位置处的多个成像设备,其中多个成像设备注册到不同的用户,
[0476]
‑
其中每个成像设备包括:
[0477]
○
采集区域,
[0478]
○
成像单元,
[0479]
○
发送器单元,以及
[0480]
○
控制单元,
[0481]
其中,每个成像设备的控制单元被配置为:
[0482]
●
触发所述成像单元,以生成采集区域的图像,以及
[0483]
●
触发所述发送器单元,以将图像和/或关于图像的信息通过网络发送至计算机系统,
[0484]
‑
计算机系统,所述计算机被配置为:
[0485]
●
接收图像和/或关于图像的信息,
[0486]
●
分析图像和/或关于图像的信息,以获得关于在不同位置处存在的(特种)害虫的信息,
[0487]
●
对于不同位置中的每个位置,计算关于所述(特种)害虫的虫害密度,
[0488]
●
识别关于所述(特种)害虫已经超过损害阈值的位置,
[0489]
●
在所有超过损害阈值的位置上启动协同地使用控制手段。
[0490]
可以通过多种方式来启动控制手段的应用:
[0491]
●
识别对在已经超过损害阈值的位置处存在的控制手段具有注册的访问权限的那些用户,并向这些用户传输消息,其中该消息包括对于控制手段以及应该哪个时间点和/或在什么时间段内应用控制手段的建议,
[0492]
●
产生应用程序图,其中该应用程序图指定分区,其中分区包括超过损害阈值的位置,其中,该应用程序图包括关于应在哪个时间点/在什么时间段内在指定的分区内针对(特种)害虫应用一种或多种控制手段,并将该应用程序图传输给用于部署控制手段的服务提供商,或传输至用于部署控制手段的机器(无人机、机器人、农业机器)。
[0493]
因此,优选的过程的特征在于以下步骤:
[0494]
‑
在一个区中的不同位置处设立多个成像设备,其中多个成像设备注册到不同的用户,
[0495]
■
其中每个成像设备包括:采集区域、成像单元、发送器单元,以及控制单元,
[0496]
‑
产生不同位置处的采集区域的图像,
[0497]
‑
分析图像,以获得关于在多个位置处存在的(特种)害虫的信息,
[0498]
‑
对于不同位置中的每个位置,计算关于所述(特种)害虫的虫害密度,
[0499]
‑
识别关于所述(特种)害虫已经超过损害阈值的位置,
[0500]
‑
在所有超过损害阈值的位置上启动协同地应用控制手段。
[0501]
本发明还提供一种计算机程序产品。对应的计算机程序通常已安装在终端用户的计算机系统上,并允许进行远程虫害控制。
[0502]
在本发明的一个实施方案中,计算机程序被配置成使得其提供由本发明的至少一个设备(直接地或经由中间服务器)递送给用户的信息。该计算机程序为用户提供了分配给他们的那些设备的概述。例如,可以借助于具有唯一的标识符(例如,标识号)的每个设备来进行分配,用户使用键盘或经由麦克风或另一输入设备通过语音命令手动地将该唯一的标识符输入到计算机程序中。还可以想到的是,标识符作为光学可读代码(例如,作为条形码或矩阵代码(qr代码、datamatrix代码等))存在于设备上,并且可以通过对应的读取器(条形码扫描仪、相机)进行读取,并转移到计算机程序中。也可以想到使用rfid标签或通过蓝牙或近场通信或通过w
‑
lan连接等从设备的永久存储器中传输标识符。
[0503]
优选地,该计算机程序可以用于调用地理地图,该地理地图记录分配给用户的设备的位置。可以想到的是,该位置是通过可能是设备一部分的gps传感器确定的。替代地,可以想到,该位置是分配给该设备所在的无线电小区的位置(例如,基站的位置)。
[0504]
通过选择设备(例如,通过输入识别数据或从虚拟菜单中选择或点击位置等),用户能够调用与特定设备有关的信息。例如,用户能够在不同时间调用设备中存在的害虫/益虫的数目。用户能够显示在不同时间生成的图像。用户能够显示图像中识别的物种。用户能够在图像中显示哪些种类已经被识别,哪些种类没有被识别。
[0505]
在一个优选的实施方案中,计算机程序向用户显示一种或多种害虫物种传播的预报。优选地,以地理地图的形式显示,在该地理地图中存在害虫物种传播的方向,其传播速度和/或是否已经超过损害阈值的颜色编码。
[0506]
本发明的其他实施方案是:
[0507]
1.一种系统,该系统包括:
[0508]
‑
一个区中的多个成像设备,其中每个成像设备包括:
[0509]
○
采集区域,
[0510]
○
成像单元,
[0511]
○
发送器单元,以及
[0512]
○
控制单元,
[0513]
其中,所述控制单元被配置为:
[0514]
■
触发成像单元生成采集区域的图像,以及
[0515]
■
触发发送器单元将与图像有关的信息通过网络发送到计算机系统,
[0516]
‑
计算机系统,所述计算机系统被配置为:
[0517]
●
从多个成像设备接收与图像有关的信息,
[0518]
●
分析接收的信息,以获得关于一个分区中存在的害虫/益虫的信息,
[0519]
●
将关于分区中存在的害虫/益虫的信息传输给一个或多个用户。
[0520]
2.根据实施方案1所述的系统,其中,
[0521]
‑
所述控制单元被配置为:触发发送器单元,以将生成的图像发送至计算机系统,
[0522]
‑
所述计算机系统被配置为:
[0523]
●
接收发送的图像,
[0524]
●
分析从分区中的成像设备接收到的图像,以识别害虫和/或益虫,并且计算该分区中至少一个害虫物种和/或至少一个益虫物种的区密度,
[0525]
●
将计算的至少一个区密度传输给用户。
[0526]
3.根据实施方案2所述的系统,其中,
[0527]
‑
所述计算机系统被配置为:
[0528]
●
分析从分区中的成像设备接收到的图像,以确定至少一种害虫物种是否已经超过损害阈值,考虑以所述害虫物种作为食物源或宿主的益虫的数目,以用于确定关于是否已经超过损害阈值的信息,
[0529]
●
将确定的关于是否已经超过损害阈值的信息传输给用户。
[0530]
4.根据实施方案1所述的系统,还包括:
[0531]
‑
分区中的至少一个植物分析设备,其中所述至少一个植物分析设备包括:
[0532]
○
成像单元,
[0533]
○
发送器单元,以及
[0534]
○
控制单元,
[0535]
其中,所述控制单元被配置为:
[0536]
■
触发所述成像单元,以生成正在该分区中种植的植物或植物部分的图像,以及
[0537]
■
触发所述发送器单元,以将生成的图像通过网络发送至计算机系统,
[0538]
‑
计算机系统,所述计算机系统被配置为:
[0539]
●
接收发送的图像,
[0540]
●
分析接收到的图像,以确定植物的发育状态、和/或害虫对植物或植物部分造成的损害的性质和/或严重性、和/或植物的健康状态,
[0541]
●
将植物的发育状态、和/或害虫对植物或植物部分造成的损害的性质和/或严重性、和/或植物的健康状态传达给用户。
[0542]
5.根据实施方案4所述的系统,其中,
[0543]
‑
所述计算机系统被配置为:
[0544]
●
接收由该分区中的成像设备发送的图像,
[0545]
●
分析接收到的图像,以确定害虫,其中确定至少一种害虫物种是否已经超过损害阈值,通过考虑植物的发育状态、和/或害虫对植物或植物部分造成的损害的性质和/或严重性、和/或植物的健康状态,以用于确定关于是否已经超过损害阈值的信息,
[0546]
●
将确定的关于是否已经超过损害阈值的信息传输给用户。
[0547]
6.根据实施方案5所述的系统,其中,
[0548]
‑
所述计算机系统被配置为:
[0549]
●
接收由该分区中的成像设备发送的图像,
[0550]
●
分析接收到的图像,以识别益虫的数目,其中所述益虫以至少一种害虫物种为食物源或宿主,通过考虑以所述至少一种害虫物种作为食物源或宿主的益虫的数目,用于确定关于是否已经超过损害阈值的信息,
[0551]
●
将确定的关于是否已经超过损害阈值的信息传输给用户。
[0552]
7.根据实施方案1
‑
6中的任一项所述的系统,其中,
[0553]
‑
所述计算机系统被配置为:
[0554]
●
分析接收到的图像,以确定至少一种害虫物种的传播方向以及至少一个害虫物种的传播速度,
[0555]
●
将该传播方向和传播速度传达给一个或多个用户。
[0556]
8.根据实施方案7所述的系统,其中,
[0557]
‑
所述计算机系统被配置为:
[0558]
●
创建未来一段时间内的一个或多个分区的至少一种害虫物种的传播的预报,
[0559]
●
将该预报传输给一个或多个用户。
[0560]
9.根据实施方案8所述的系统,其中该预报包含天气数据。
[0561]
10.根据实施方案1
‑
9中的任一项所述的系统,其中所述成像设备和/或至少一个植物分析设备包括保持器,成像设备通过该保持器能够定位在地面上方的限定距离处,其中该距离能够变化。
[0562]
11.根据实施方案1
‑
10中的任一项所述的系统,其中所述成像设备包括自动清洁采集区域的装置。
[0563]
12.根据实施方案1
‑
11中的任一项所述的系统,其中一个或多个成像设备包括防
止采集区域被植物部分弄脏的屏障。
[0564]
13.一种方法,该方法包括以下步骤:
[0565]
‑
在一个区内设立多个成像设备,其中每个成像设备包括:
[0566]
○
采集区域,
[0567]
○
成像单元,
[0568]
○
发送器单元,以及
[0569]
○
控制单元,
[0570]
‑
生成每个成像设备的采集区域的图像,
[0571]
‑
将与图像有关的信息传输到计算机系统,
[0572]
‑
分析传输的信息并生成关于一个分区内存在的害虫和/或益虫的信息,
[0573]
‑
将关于分区内存在的害虫和/或益虫的信息传输给一个或多个用户。
[0574]
14.一种计算机程序产品,包括能够被加载到计算机的储存器中的计算机程序,计算机程序在储存器中触发计算机来执行以下步骤:
[0575]
‑
接收来自一个区中的多个成像设备的信息,其中来自每个成像设备的信息涉及从成像设备的采集区域所生成的图像,
[0576]
‑
分析接收的信息,并且生成关于一个分区内存在的害虫和/或益虫的信息,
[0577]
‑
将关于分区内存在的害虫和/或益虫的信息传输至一个或多个用户。
[0578]
下面通过附图和实施例详细阐明本发明,而无意将本发明限制在附图和实施例的具体特征和特征组合中。
[0579]
如附图所示:
[0580]
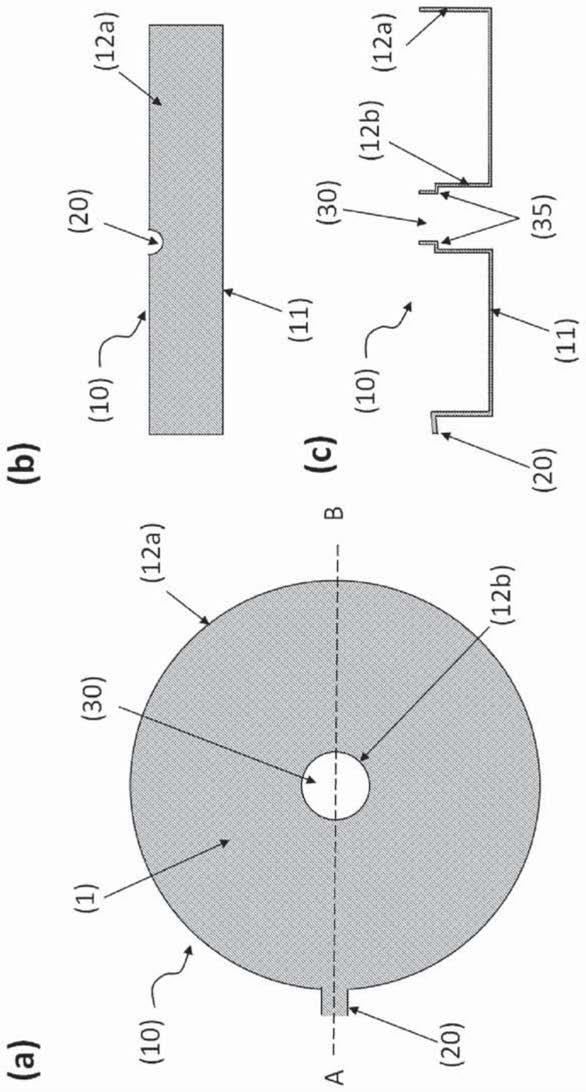
图1示出了容器(10)的示意图,其提供了用于害虫和/或益虫的采集区域(1)。
[0581]
图1a以俯视图示出了容器(10)。图1b从点a(参见图1a)的方向以侧视图示出了容器(10)。图1c从侧面示出了容器(10)沿虚线a
‑
b(见图1a)的横截面。
[0582]
容器(10)是具有圆形横截面的圆柱形形状。圆柱在底部由基座(11)封闭;其在顶部开口。基座(11)和两个垂直于基座(11)延伸的同心侧壁(12a,12b)形成一个空间,以容纳液体。采集区域(1)是从顶部观察的。由侧壁(12b)定界的圆形凹槽(30)被引入到容器(10)的中间。该凹槽在向上方向上变窄,形成可以充当保持器的接触表面的环(35)(参见图2)。
[0583]
在侧面处引入位于侧壁(12a)中半圆形的凹槽,通道(20)在该侧面处向外指向。进入到容器(10)中的雨水可以通过该通道流走。
[0584]
图2以横截面示出了图1所示的容器(10)以及容器被固定至其上的伸缩杆(40)。借助于伸缩杆,可以改变采集区域(1)与地面之间的距离。容器通过环(35)倚靠在伸缩杆(41)上。伸缩杆(41)在上部区域具有内螺纹(图中未示出),用于将容器(10)和伸缩杆(40)彼此锁定的螺钉(41)已经拧入其中。伸缩杆(40)在下部区域具有可被压入土壤中的尖端(41)。可以想到的是,提供用于设立容器(10)的其他装置,例如用于钻入土壤的螺纹或三脚架。可以想到其他选择。
[0585]
图3示出了图1b中所示的容器(10),在其上方安装有笼子(50)。在此,网格间距尺寸使得没有叶子进入到容器中。成像单元(2)安装在网格(50)的顶部。该成像单元(2)在笼子内。两个光照单元(70a,70b)确保采集区域的限定的照明。
[0586]
图4示出了提供采集区域(10)的平板的示意图。图4a以侧视图示出了平板。图4b以
俯视图示出了平板。图4c以另一侧视图示出了平板。在卡片上安装保持杆(7),在保持杆(7)的端部固定成像单元。
[0587]
图5示出了图4a中所示的平板,其被安装在提升平台(42)上。提升平台(42)在下部区域具有尖端(41),提升平台通过该尖端可以固定在土壤中。
[0588]
图6示出了本发明的成像设备(a)的一个实施方案的示意图。该成像设备(a)包括采集区域(1)、成像单元(2)、发送器单元(3)和控制单元(4)。
[0589]
图7示出了本发明的成像设备(a)的另一实施方案的示意图。该成像设备(a)包括采集区域(1)、成像单元(2)、发送器单元(3)、控制单元(4)和评估单元(5)。
[0590]
图8示出了本发明的植物分析设备(p)的一个实施方案的示意图。该植物分析设备(a)包括成像单元(2)、发送器单元(3)和控制单元(4)。
[0591]
图9示出了本发明的植物分析设备(p)的另一实施方案的示意图。该植物分析设备(a)包括成像单元(2)、发送器单元(3)、控制单元(4)和评估单元(5)。
[0592]
图10示意性地示出了根据本发明的系统的一个实施方案。该系统包括生成图像的多个设备(a1,a2,p)。与图像有关的信息通过无线电网络传输到基站(b)。它们通过网络从基站传输到计算机系统(c)。
[0593]
图11示意性地示出了根据本发明的系统的另一实施方案。该系统包括生成图像的多个设备(a1,a2,p)。与图像有关的信息通过无线电网络传输到基站(b)。信息通过网络(由云表示)从基站传输到计算机系统(c1)。可以通过计算机系统(c2)从计算机系统(c1)调用与图像有关的信息。
[0594]
图12示出了本发明的计算机程序的示意图。以曲线图显示了以限定的时间t以自动方式在图像中计数的物种数n。通过单击数据点,将显示对应的图像。
[0595]
图13示出了容器(10)的示意图,该容器提供了用于害虫和/或益虫的采集区域(1)。图13(a)以俯视图示出了容器(10)。图13(b)以从点a的方向的侧视图示出了容器(10)(见图13(a))。图13(c)从侧面示出了容器(10)沿虚线a
‑
b(见图13(a))的横截面。容器(10)是具有圆形横截面的圆柱形形状。圆柱在底部由基座(11)封闭;其在顶部开口。基座(11)和两个垂直于基座(11)延伸的同心侧壁(12a,12b)形成一个空间。采集区域(1)是从顶部观察的。由侧壁(12b)定界的圆形凹槽(30)被引入到容器(10)的中间。该凹槽在向上方向上变窄,形成可以充当保持器的接触表面的环(35)。在一个点处将半圆形的凹槽引入到容器(10)的侧壁(12a)中,通道(20)在该点处向外指向。进入到容器(10)中的雨水可以通过该通道流走。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1