用于割草机的可调电气控制手柄的制作方法
用于割草机的可调电气控制手柄
背景技术:
[0001]
诸如割草机的自推进机器通常提供手柄,在该手柄上安装有用于被用户操纵的控件。已知的割草机通常包括在割草机的主操作组件后面延伸的手柄,该手柄包括抓握区域,当用户在向前方向移动割草机期间在割草机后面行走时,该抓握区域被用户抓握。因为割草机手柄经常需要用户在操作期间持续抓握手柄,所以一个或多个控件被安装在手柄上,以便用户在抓握手柄并操作割草机的同时进行操纵。利用这种构造,在割草机的操作期间用户对控件的访问限于设置在抓握区域上的那些控件。此外,由于设置在具有人体工程学设计的割草机手柄上的抓握区域的空间有限,因此,人体工程学割草机手柄具有用户在操作割草机时可用的有限的控制装置。此外,由于割草机手柄抓握区域的控件空间有限,已知的割草机控制手柄缺乏在割草机操作时调节割草机的预设地面速度的能力,或者缺乏设置在手柄上用于调节割草机地面速度的离合器。
技术实现要素:
[0002]
根据一个方面,用于割草机的可调电气控制手柄包括:第一杆,该第一杆被配置成在伸出位置和下压位置之间致动;以及第二杆,该第二杆被配置成在伸出位置和下压位置之间致动。第二杆面对第一杆,使得当第一杆相对于伸出位置处于下压位置时,第一杆的区段更靠近第二杆,并且当第二杆相对于伸出位置处于下压位置时,第二杆的区段更靠近第一杆。控制器与第一杆和第二杆中的每一者可操作地相关联,以便确定第一杆相对于第一杆的下压位置或伸出位置的位置以及第二杆相对于第二杆的下压位置或伸出位置的位置。另外,第一杆限定具有面对第二杆的开口的内部,使得第一杆的内部被配置用于当第一杆和第二杆中的至少一者朝向相应的下压位置致动时接纳第二杆。
[0003]
根据另一方面,一种用于割草机的可调电气控制手柄包括:盖;第一杆,该第一杆设置在盖内并且枢转地固定到盖;以及第二杆,该第二杆设置在盖内。第二杆枢转地固定到第一杆和盖,使得第一杆和第二杆相对于盖共用公共旋转轴线。第一杆和第二杆在盖内面向彼此,使得当第一杆相对于第一杆的伸出位置处于下压位置时,第一杆的中间区段更靠近第二杆,并且当第二杆相对于第二杆的伸出位置处于下压位置时,第二杆的中间区段更靠近第一杆。
[0004]
根据另一方面,用于割草机的手柄组件包括离合器杆、制动杆、固定至该离合器杆的第一传感器目标、固定至该制动杆的第二传感器目标、被配置用于控制割草机的地面速度的控制器、结合到控制器中的第一传感器和结合到控制器中的第二传感器。离合器杆被配置成在伸出位置和下压位置之间致动。制动杆被配置成在伸出位置和下压位置之间致动,制动杆与离合器杆枢转地固定,使得离合器杆和制动杆共用公共旋转轴线。第一传感器目标的位置确定离合器杆在离合器杆的伸出位置和下压位置之间的位置,并且第二传感器目标的位置确定制动杆在制动杆的伸出位置和下压位置之间的位置。割草机的地面速度由控制器控制,包括设置最大地面速度与最小地面速度之间的最高地面速度中的每一者,检测离合器杆和制动杆中的每一者相对于伸出位置和下压位置的位置,并将所检测到的离合
器杆的位置与最高地面速度和最小地面速度之间的输出地面速度相关联。第一传感器被配置用于检测第一传感器目标的位置,并且第二传感器被配置用于检测第二传感器目标的位置。控制器在割草机的操作期间连续地检测离合器杆的位置,以便能够在割草机的操作期间调节输出地面速度。
附图说明
[0005]
图1是根据本公开的用于割草机的示例性可调电气控制手柄的透视图。
[0006]
图2是沿图1的线a-a截取的控制手柄的截面图。
[0007]
图3是控制手柄的俯视图。
[0008]
图4是控制手柄的前视图。
[0009]
图5是控制手柄的分解透视图。
[0010]
图6是结合在控制手柄中的印刷电路板的前视图。
[0011]
图7是控制手柄的局部透视图。
[0012]
图8是处于一个操作位置的控制手柄的局部截面图。
[0013]
图9是处于另一操作位置的控制手柄的局部截面图。
[0014]
图10是控制手柄的局部截面透视图。
[0015]
图11是控制手柄的局部透视图。
具体实施方式
[0016]
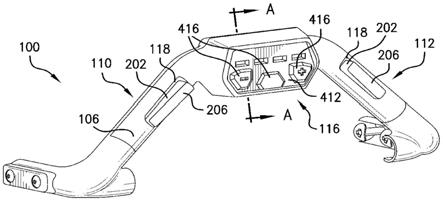
当然,应当理解,本文的说明书和附图仅仅是示例性的,并且可在不脱离本公开的情况下对所公开的结构进行各种修改和改变。现在参照附图,其中贯穿若干视图,类似的数字指代相同的零件,图1、图3和图4示出了根据本公开的用于相关割草机(未示出)的可调电气控制手柄100。手柄包括盖104,该盖限定手柄外部106,该手柄外部在人体工程学上形成为包括第一抓握区域110和第二抓握区域112中的每一者。第一抓握区域110和第二抓握区域112都从手柄中心116向下弯曲,以被用户抓握。如图所示,第一抓握区域110和第二抓握区域112由第一孔118和第二孔122表示,该第一孔和该第二孔限定在盖104中并且分别被配置用于延伸穿过并超出盖104所限定的外部的第一杆200(图5)的第一按钮202和第二杆300(图5)的第二按钮302。第一按钮202和第二按钮302中的每一者通常被偏置在超出手柄外部106的延伸位置,使得用户在第一按钮202和第二按钮302上抓握手柄100朝着相应的下压位置致动第一按钮202和第二按钮302。为了提供人体工程学抓握区域110、112,当第一按钮202和第二按钮302中的每一者处于相应的伸出位置时(图7),第一按钮202的外表面206和第二按钮302的外表面306从抓握区域110、112略微向外延伸并沿着该抓握区域平行。
[0017]
第一按钮202和第二按钮302分别从第一杆200和第二杆300延伸。第一杆200和第二杆300均设置在盖104中,并且被配置用于在相应的伸出位置和下压位置之间致动。如图8和图9之间所示,第一按钮202和第二按钮302两者的伸出位置和下压位置分别对应于第一杆200和第二杆300的伸出位置和下压位置。第一杆200的下压位置限定了第一杆200的运动范围的端部(第二杆300未阻挡该运动范围),并且第二杆300的下压位置限定了第二杆300的运动范围的端部(第一杆200未阻挡该运动范围)。如所描绘的,第一杆200和第二杆300被配置用于同时被致动到相应的下压位置。
[0018]
如图7所示,第一按钮202由第一杆200的凸起部分限定,该凸起部分远离第二杆300延伸并穿过由盖104限定的第一孔118。第二按钮302由第二杆300的凸起部分限定,该凸起部分远离第一杆200延伸并穿过由盖104限定的第二孔122。以这种方式,第一杆和第二杆中的每一者朝着相应的伸出位置偏置,并且被配置成通过分别按下第一按钮202和第二按钮302而朝着相应的下压位置致动。第一杆200和第二杆300两者彼此面对地设置在盖104中,使得当第一杆200相对于伸出位置处于下压位置时,第一杆200更靠近第二杆300,并且当第二杆300处于下压位置时,第二杆300更靠近第一杆200。
[0019]
如图5所示,第一杆200包括由销212表示的第一端208和第二端210,该销与第一端和该第二端一体形成,并且被配置用于当组装手柄100时朝向盖104的内表面124延伸。第二杆300包括由铰链312(图11)表示的第一端308和第二端310,该铰链形成在该第一端和该第二端中并且被配置用于接纳销212。当第一杆200和第二杆300被组装时,销212延伸穿过铰链312,从而将第一杆200和第二杆300分别枢转地固定在第一端208、308和第二端210、310处。根据一个方面,销212以扣合连接接合铰链312,并且该扣合连接所允许的第一杆200和第二杆300的旋转限定了第一杆200和第二杆300中的每一者的公共旋转轴线314。如图7所示,销212进一步延伸到盖104中,使得第一杆200和第二杆300枢转地彼此固定,并且将盖104分别固定在第一端208、308和第二端210、310处。通过这种配置,每个第一端208、308和第二端210、310被配置成绕公共旋转轴线314旋转。
[0020]
参照图5,第一杆200的中间区段218连接第一杆200的第一端208和第二端210,并且被配置成绕与第一杆200的第一端208和第二端210的公共旋转轴线314旋转。第二杆300的中间区段318连接第一端308和第二端310,并且被配置成绕与第一端308和第二端310的公共旋转轴线314旋转。
[0021]
在图7、图8和图9中,第一杆200和第二杆300在盖104内彼此面对,使得当第一杆200相对于第一杆200的伸出位置处于下压位置时,第一杆200的中间区段218更靠近第二杆300,并且当第二杆300相对于第二杆300的伸出位置处于下压位置时,第二杆300的中间区段318更靠近第一杆200。如图2和图8至图10所示,第一杆200的中间区段218包括弯曲的中间部分220,该弯曲的中间部分具有上侧壁224和下侧壁226,该上侧壁和下侧壁从弯曲的中间部分220的相对边缘朝向第二杆300平行延伸,以限定第一杆200的内部230。第一杆200的内部230包括面对第二杆300的开口232,该开口被配置当第一杆200和第二杆300中的至少一者朝着相应的下压位置致动时接纳第二杆300。
[0022]
第二杆300包括主体320和从主体320延伸的至少一个第二杆指状部324,以与主体320限定第二杆300的内部326。第二杆300的内部326限定面对第一杆200的开口330,使得第二杆300被配置用于当第一杆200和第二杆300中的至少一者朝向相应的下压位置致动时接纳第一杆200。具体地,在图9所描绘的实施方案中,第二杆300被配置用于在第二杆300的主体320和至少一个第二杆指状部324之间接纳第一杆200的上侧壁224,而第一杆200被配置成当第一杆200和第二杆300中的至少一者朝向相应的下压位置致动时将第二杆300的主体320接纳在第一杆200的内部230中。以这种方式,第一杆200和第二杆300中的每一者被配置用于当第一杆200和第二杆300中的至少一者朝向相应的下压位置致动时接纳第一杆200和第二杆300中的另一者。通过这种结构,第一杆200和第二杆300中的每一者在手柄100的人体工程学约束内具有相对大的杆行程。
[0023]
如图10所示,第一杆200包括至少一个第一杆指状部236,该至少一个第一杆指状部从第一杆200延伸并且朝向盖104的内表面124延伸。如图2和图5所示,第一杆200的中间区段218和第二杆300的中间区段318各自被偏置远离第一杆200的中间区段218和第二杆300的中间区段318中的另一者并分别被第一杆偏置构件238和第二杆偏置构件332偏置朝向相应的伸出位置。第一杆偏置构件238插入在至少一个第一杆指状部236与盖104之间,并且第二杆偏置构件332插入在至少一个第二杆指状部324与盖104之间。
[0024]
在图10中进一步描绘,至少一个第一杆指状部236包括第一杆突起242,该第一杆突起从至少一个第一杆指状部236朝向盖104的内表面124延伸。第一杆突起242被配置成当第一杆偏置构件238与第一杆200组装时固定第一杆偏置构件238。至少一个第二杆指状部324包括第二杆突起336,该第二杆突起从至少一个第二杆指状部324朝向盖104的内表面延伸。第二杆突起336被配置成当第二杆偏置构件332与第二杆300组装时固定第二杆偏置构件332。在所描绘的方面中,至少一个第二杆指状部324包括设置在第二杆300的中间区段318上的两个第二杆接触指状部338。第二杆接触指状部338各自从第二杆300朝向盖104的内表面124延伸,并且被配置用于当第二杆300朝向下压位置致动时接触盖104。
[0025]
从第一杆200延伸的第一杆臂244具有固定到第一杆200的第一磁体248(例如,第一磁体248可以胶合到第一杆臂244的与第一杆200相对的端部上)。从第二杆300延伸的第二杆臂342具有固定到第二杆300的第二磁体344(例如,第二磁体344可以通过扣合连接保持在第二杆臂342中)。如图2所示,设置在手柄内的控制器400包括印刷电路板(pcb)404,该印刷电路板在手柄100的第一抓握区域110和第二抓握区域112之间安装在盖104的内表面124上。控制器400包括安装在pcb 404上的第一传感器406和第二传感器410。第一传感器406和第二传感器410分别是第一霍尔效应传感器和第二霍尔效应传感器,并且根据本公开,第一霍尔效应传感器是线性模拟输出霍尔效应传感器,并且第二霍尔效应传感器是二进制数字输出霍尔效应传感器。第一磁体248是第一传感器406的传感器目标,使得第一传感器406被配置用于检测第一传感器目标248相对于第一杆200的伸出位置或下压位置的位置。就这一点而言,第一传感器目标248的检测位置确定第一杆200相对于第一杆200的伸出位置或下压位置的位置。第二磁体344是第二传感器410的传感器目标,使得第二传感器410被配置用于检测第二传感器目标344相对于第二杆300的伸出位置或下压位置的位置。就这一点而言,第二传感器目标344的检测位置确定第二杆300相对于第二杆300的伸出位置或下压位置的位置。
[0026]
如图9所示,当第一杆200处于下压位置时,相对于由第一杆200在第一杆200的伸出位置和下压位置之间的运动范围限定的行程,第一传感器目标248最大程度地远离第一传感器406。当第二杆300处于下压位置时,相对于由第二杆300在第二传感器410的伸出位置和下压位置之间的运动范围限定的行程,第二传感器目标344最大程度地靠近第二传感器410。
[0027]
控制器400被配置为连续地确定或检测第一传感器目标248和第二传感器目标344的位置。因为第一传感器406是模拟霍尔效应传感器,所以控制器400被配置为将第一磁体248的位置记录为模拟(即非二进制)输入。因为第二传感器410是数字霍尔效应传感器,所以控制器400被配置为将第二磁体344的位置记录为数字输入,使得控制器基于第二磁体344是否沿着第二磁体344的行程在第二传感器410的一定接近范围内对来自第二霍尔效应
传感器410的两个信号输出中的一者进行记录。
[0028]
在手柄100的实施方案中,第一杆200是离合器杆,并且第二杆300是制动杆,并且控制器400与离合器杆200和制动杆300可操作地关联。控制器400被配置用于控制相关的割草机(未示出),包括设置最高地面速度(其在最大地面速度和最小地面速度之间)和最小地面速度中的每一者,确定或检测离合器杆200和制动杆300相对于相应的伸出位置和下压位置的位置,并且将离合器杆200的确定位置或检测位置与在最高地面速度和最小地面速度之间的输出地面速度相关联。通过将所确定或检测的离合器杆200的位置与在最高地面速度和最小地面速度之间的输出地面速度相关联,用户能够在割草机在最小地面速度和最高地面速度之间操作期间,使离合器杆200顺桨,并进而使输出地面速度顺桨。
[0029]
控制器400还被配置为在割草机操作时重新调整割草机的最高地面速度和最小地面速度。这通过控制面板412来执行,控制面板的示例性实施方案在图1中示出。控制面板412与pcb404相对地在第一抓握区域110和第二抓握区域112之间设置在盖104的手柄外部106上,并且具有被配置用于控制割草机的按钮416。根据一个方面,控制器400被配置为当制动杆300被朝向下压位置致动并且按钮416中的至少一个按钮(诸如启动按钮)也被致动时,启动割草机的相关马达(未示出)。
[0030]
参照图5,按钮垫418在按钮416和pcb 404之间设置在盖104内,该按钮垫被配置用于将施加在至少一个按下的按钮上的力传递到pcb 404。在实施方案中,按钮垫418由橡胶形成,该橡胶能够通过打开或关闭开关元件将施加在至少一个按下的按钮416上的力转换成电信号。控制面板412上的按钮416被配置为控制割草机,以便重新调节割草机的最高地面速度和最小地面速度,并且可以将割草机的最小地面速度设置为零。
[0031]
应当理解,上面公开的各种元件以及其他特征和功能或它们的替代物或变体可以期望地组合到许多其他不同系统或应用中。此外,本领域的技术人员可以之后做出本文的各种目前无法预料或无法预期的替代、修改、变化或改进,这些也旨在涵盖在所附权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1