松鼠嗅觉训练培养装置的制作方法
[0001]
本发明涉及动物实验设备,具体说是一种松鼠嗅觉训练培养装置,其主要用于对松鼠进行嗅觉记忆训练,最终实现松鼠在嗅探到特定气味时做出相应的动作反馈。
背景技术:
[0002]
现有的嗅觉训练装置往往存在结构复杂、使用维护成本高的缺陷,如申请公布号cn103202240a的发明专利申请公开的一种小鼠气味训练探测中气味干扰仿真装置,该技术方案由三个转盘,一个吸入式电磁铁驱动的针头刺入部件,一个四路时间继电器组成。各转盘中心固定在位于其中心的减速电机上,转盘边缘等距固定多个顶空样品瓶,各瓶内装有少量不同的常见干扰气味物品。该技术方案能快速消减小鼠对各种无关气味的反应。
技术实现要素:
[0003]
本发明的目的是提供一种松鼠嗅觉训练培养装置,从根本上解决了上述问题,其具有结构简单紧凑、使用方便快捷、训练效率高、记忆巩固牢靠、自动化程度高等优点。
[0004]
为实现上述目的,本发明提供了如下技术方案:该松鼠嗅觉训练培养装置,包括箱体、奖励装置(2)、控制系统、数据采集系统,其技术要点是:箱体由外层支撑骨架(1),并在骨架之间安装具孔的透明板,并采用上下两部分,两部分之间通过爬梯相互连接,并且在上部的开口处设置由电机驱动的封板;其中上层空间进一步设置成双层铁笼(14)结构,并通过爬梯相连通;铁笼(14)本体通过箱体骨架吊装限位在上部结构内,铁笼(14)的上下外缘设置驱动圆环(12),驱动圆环(12)上设有一个以上的驱动电机(13),驱动圆环(12)与铁笼(14)边缘之间设有支撑轮(15);奖励装置(2)包括两个以上的给食装置(21)、挂载在笼子内侧的水槽、洗涤液容器,给食装置(21)包括固定在上或下驱动圆环(12)上的丝杠电机组件、位于上下驱动环之间的导向柱(212)、限位在四刚上的驱动支架(213)、设置在驱动支架(213)上的气味滚筒(214)和清洗刷(215)、设置在驱动圆环(12)上与各清洗刷(215)相对应的清洗喷头、与气味滚筒(214)配合的给食槽;给食槽位于驱动支架(213)最上部,呈漏斗形结构,漏斗底部的一侧设置开口,开口上设置绞龙出料结构。
[0005]
本发明的有益效果:整体方案上,本发明的培养装置结构简单紧凑,占地面积小,几乎可实现无人管控下的松鼠自学习、气味巩固训练。使用方便快捷,只需在交互屏幕上设定相应的实验参数,并定期投放饵料和水源,松鼠即可在较大的活动空间内生存与自我学习训练,几乎无需人工介入。训练效率高,通过在生物体内使用rfid芯片,可投放多只松鼠同时训练,rfid芯片作为身份识别码,分别记录各动物的学习进程,从而在单位时间内尽可能多的完成训练。记忆巩固牢靠,通过系统控制,可实现各气味滚筒的随机布置,排除了空间或干扰气味的影响,进一步提高了其对标的气味的识别能力。自动化程度高,采用可编程的控制主板,预制控制程序,或通过可视化图形编程,根据实验实际需要进行更灵活的自定义编程,提高了适用范围。
[0006]
综上所述,本发明具有结构简单紧凑、使用方便快捷、训练效率高、记忆巩固牢靠、自动化程度高等优点。
附图说明
[0007]
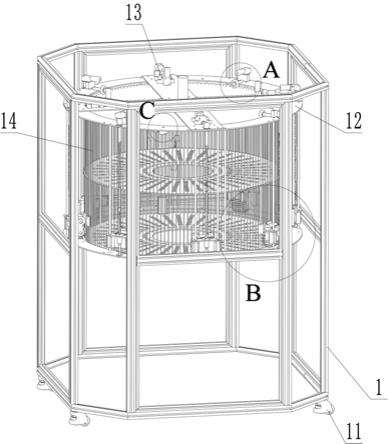
图1为本发明的等轴侧视结构示意图。
[0008]
图1a为图1中a部分的局部放大结构示意图。
[0009]
图1b为图1的b部分的局部放大结构示意图。
[0010]
图1c为图1的c部分的局部放大结构示意图。
具体实施方式
[0011]
以下结合图1,通过具体实施例详细说明本发明的内容。该松鼠嗅觉训练培养装置,包括箱体、奖励装置、控制系统、数据采集系统;其中,箱体由外层支撑骨架1,并在骨架之间安装具孔的透明板(如亚克力板),并采用上下两部分,两部分之间通过爬梯(图中未示出)相互连接,并且在上部的开口处设置由电机驱动的封板;其中上层空间进一步设置成双层铁笼14结构,并通过爬梯相连通;铁笼14本体通过箱体骨架吊装限位在上部结构内,铁笼14的上下外缘设置驱动圆环12,驱动圆环12上设有一个以上的驱动电机13,驱动圆环12与铁笼14边缘之间设有支撑轮15。铁笼的各层地板采用镂空结构,方便粪便及尿液的清理。
[0012]
奖励装置2包括两个以上的给食装置21(图中的实施例为八个)、挂载在笼子内侧的水槽(图中未示出)、洗涤液(如乙醇)容器(图中未示出),给食装置21包括固定在上或下驱动圆环12上的丝杠电机组件、位于上下驱动环之间的导向柱212、限位在四刚上的驱动支架213、设置在驱动支架213上的气味滚筒214和清洗刷215、设置在驱动圆环12上与各清洗刷215相对应的清洗(去味)喷头、与气味滚筒214配合的给食槽;给食槽位于驱动支架213最上部,优选采用漏斗形结构,漏斗底部的一侧设置开口,开口上设置绞龙出料结构。
[0013]
控制系统(图中未示出)包括控制主板、远程通讯系统、数据处理系统、位于支撑骨架1上的触控屏;优选的,控制主板安装在笼子顶部;数据处理系统包括设置在控制主板上的存储模块和处理器。
[0014]
数据采集系统(图中未示出)包括挂载在铁笼14上的一个以上的摄像头、位于气味滚筒214转轴上的传感器。使用时,预先在各气味滚筒214内投放具有不同标的气味的物质或空置,通过支撑骨架1上的交互屏幕预先设定实验参数,例如设定以下条件:1)设定旋转特定的其中一个标的气味滚筒才会触发给食槽的绞龙电机,将其他气味滚筒作为干扰气味,触碰时无任何动作;2)气味滚筒214旋转n周时,才触发给食槽底部的绞龙电机,用以巩固气味识别能力;3)设定当标的气味滚筒214被触发n次后,随机调整标的气味滚筒214的位置,用以排除空间位置的影响;4)设定当标的气味滚筒214被触发n次后,对其进行清洗,避免原有气味的干扰。
[0015]
对于条件3),气味滚筒上的传感器可用于记录标的气味滚筒的触发次数,通过预先编写的程序,当满足设定条件后,驱动环上的驱动电机旋转带动全部奖励装置绕笼子旋
转特定角度,然后通过丝杠电机组件定位给食槽和气味滚筒的位置,如定位在上、中、下三个位置上,其中上、下位置分别对应铁笼的上层和下层,中部位置表示该气味滚筒空置,不用于本次实验。
[0016]
附图标记说明:1支撑骨架11万向轮12驱动圆环13驱动电机14铁笼15支撑轮2奖励装置21给食装置211丝杠组件212导向柱213驱动支架214气味滚筒215清洗刷。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1