木薯茎杆粉碎还田机粉碎刀片离地间隙监控系统的制作方法
[0001]
本发明涉及一种农作物茎杆粉碎还田机,尤其涉及一种木薯茎杆粉碎还田机粉碎刀片离地间隙监控系统。
背景技术:
[0002]
木薯是我国南部地区在八九十年代引进种植的一种经济作物,加之南方丘陵地貌及配套农艺设施跟不上完善步奏,其生产收获等农机装备的研究就相对较少,尤其是与木薯茎杆收获处理相关的农机装备。目前木薯生产作业需要满足更高的机械生产作业需求,而现存在有的木薯茎杆粉碎还田机尚作业效率依然不高,也不能很好的有效地解决各种内外因素造成影响作业质量地下的问题。木薯茎杆粉碎还田后会经常出现木薯茎杆粉碎还田不彻底,残留茎杆过长等现象,其刀片离地间隙是决定木薯茎杆粉碎还田作业质量的关键因素之一(理论上刀片离地间隙不大于木薯杆直径)。刀片离地间隙过大,木薯杆粉碎不够彻底,严重影响机械收获并导致木薯杆来年萌芽而影响作物种植;刀片离地间隙过小,作业过程机具容易接触土壤,将增加粉碎作业功耗、加快刀具磨损并损伤浅层木薯块根。目前国内尚未对木薯茎杆粉碎机刀片离地间隙进行监测,在一定程度上限制了木薯产业发展需求。
[0003]
木薯茎杆粉碎还田机田间作业时,由于作业时地表呈现起伏不平状态,粉碎刀片离地间隙无法跟随地表进行起伏,会造成粉碎后的残留木薯茎杆长短不一,粉碎还田效果难以保证。粉碎刀片离地间隙是秸秆粉碎还田机械重要作业参数之一,目前,国内秸秆粉碎还田机依然处在机械式作业阶段,国内尚无粉碎刀片离地间隙测量装置和控制方法运用在秸秆粉碎还田机械上的研究成果。
技术实现要素:
[0004]
本发明所要解决的技术问题是如何提高木薯茎杆粉碎还田机粉碎还田作业质量,提供一种木薯茎杆粉碎还田机粉碎刀片离地间隙可随地表起伏自动调控,同时可对关键作业参数实时监测、数据保存、预警等功能的木薯茎杆粉碎还田机用监控系统。
[0005]
为解决上述技术问题,本发明采用的技术方案是:
[0006]
一种木薯茎杆粉碎还田机粉碎刀片离地间隙监控系统,该系统包括用于探测地面起伏的仿形检测机构,控制刀片升降的液压执行机构和与这两个机构信号相连的微处理器;所述仿形检测机构包括姿态检测装置,仿形预紧弹簧杆,仿形支杆和仿形轮;所述姿态检测装置设于所述仿形支杆上;所述仿形支杆的一端与所述还田机的机架铰接,另一端与所述仿形论的转轴铰接;所述仿形预紧弹簧杆的一端与所述还田机的机架铰接,另一端与所述仿形支杆的杆茎铰接,并通过向仿形支杆的杆茎施加向下的压力,将所述仿形轮压向地面;所述粉碎还田机在田里行进时,所述微处理器持续接受来自姿态检测装置的初始姿态信息并解算为仿形支杆相对垂直方向的角度,并根据该角度信息相应的发送信号给所述液压执行机构,控制刀片升降。
[0007]
进一步地,所述姿态检测装置为陀螺仪姿态检测装置。
[0008]
进一步地,所述液压执行机构包括继电器,电磁阀和控制刀片升降的液压缸;所述微处理器与所述电磁阀通过所述继电器连接,由所述微处理器控制所述继电器开关动作,进而控制所述电磁阀,所述电磁阀通过电磁换向阀来控制所述液压缸。
[0009]
本发明还公开了一种装载了上述粉碎刀片离地间隙监控系统的木薯茎杆粉碎还田机监控系统,所述木薯茎杆粉碎还田机监控系统还包括车载终端,所述姿态检测装置通过所述微处理器与所述车载终端连接,所述微处理器将解算后得到的仿形支杆相对垂直方向角度信息发送到所述车载终端进行进一步处理。
[0010]
进一步地,所述木薯茎杆粉碎还田机监控系统还包括卫星定位装置,所述卫星定位装置与所述车载终端相连,所述卫星定位装置为gps或北斗定位装置。
[0011]
进一步地,所述卫星定位装置接收到时间信息后,输出可调节的脉冲信号,同时发送初始定位数据给所述车载终端;所述车载终端接收来自所述微处理器的仿形支杆相对垂直方向角度信息和所述卫星定位装置的初始定位数据,并经过进一步解算得到粉碎刀片离地间隙、定位信息及行车速度信息并实时显示。
[0012]
进一步地,所述卫星定位装置与车载终端,所述微处理器与车载终端均通过串口通信方式实现数据的发送与接收,通信接口装置为usb数据接口。
[0013]
进一步地,所述还田机的驱动装置为拖拉机,所述卫星定位装置与车载终端均安装于所述拖拉机上。
[0014]
本发明的有益效果是:本发明可实现对木薯茎杆粉碎还田机粉碎刀片离地间隙的自动控制,并对粉碎刀片离地间隙进行实时监测,同时还可对作业速度、经纬度、粉碎刀片离地间隙实时变化曲线图进行监测,也可实现粉碎刀片离地间隙实时预警、作业参数保存等功能。所述的姿态检测装置负责检测仿形检测机构在垄面作业时仿形支杆相对垂直方向角度,将其发送到微处理器进行处理后再发送到车载终端,车载终端根据仿形检测机构的角度和尺寸等信息进行计算,可得出当前木薯茎杆粉碎还田机粉碎刀片离地间隙,并显示于车载终端,使驾驶员可实时掌握粉碎刀片离地间隙信息。这些功能的实现有效解决了驾驶员对木薯茎杆粉碎还田机作业情况了解不及时、粉碎刀片离地间隙无法跟随地表起伏及时调整等问题所导致的木薯茎杆粉碎还田作业效率低下问题,也提高了木薯茎杆粉碎还田机信息智能化水平。
附图说明:
[0015]
图1是本发明实施例监控系统总体结构示意图;
[0016]
图2是本发明实施例仿形检测机构示意图;
[0017]
图3是本发明实施例刀片控制部分示意图;
[0018]
图4是本发明实施例监测部分示意图;
[0019]
图5是本发明实施例角度-离地间隙数学模型示意图;
[0020]
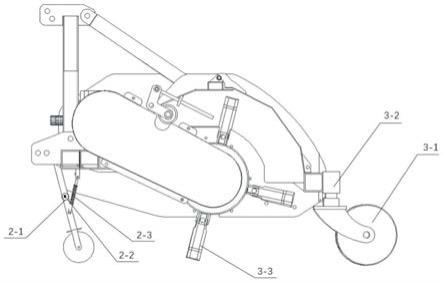
图中标号名称:1-1卫星定位装置、1-2车载终端、1-3拖拉机、2-1减震垫片、2-2姿态检测装置、2-3仿形预紧弹簧杆、2-4仿形支杆、2-5仿形轮、3-1地轮、3-2液压缸、3-3粉碎刀片。
具体实施方式
[0021]
下面通过实施例结合附图和对本发明的方案进行详细地说明,一种木薯茎杆粉碎还田机粉碎刀片离地间隙监控系统及装载了上述系统的木薯茎杆粉碎还田机监控系统,如图1至图5所示。
[0022]
木薯茎杆粉碎还田机监控系统如图1所示,包括数据采集、控制、数据监测三个部分组成。数据采集部分包括所述姿态检测装置2-2和微处理器部分,主要负责仿形检测机构姿态检测和姿态数据的接收、处理、发送。控制部分包括所述微处理器、继电器、电磁阀、液压缸3-2几部分组成,主要负责接收和处理控制命令,以及控制木薯茎杆粉碎还田机粉碎刀片离地间隙可随垄面的高低变化而进行自动调控。数据监测部分主要由所述车载终端1-2、卫星定位装置1-1、微处理器组成,其主要负责粉碎刀片离地间隙、作业速度等参数,以及粉碎刀片离地间隙参数曲线变化的实时监测,不仅可实现人机交互功能,也能实现粉碎刀片离地间隙预警和参数设置、监测数据的保存等功能。
[0023]
仿形检测机构如图2所示,主要包括减震垫片2-1、姿态检测装置2-2、仿形预紧弹簧杆2-3、仿形支杆2-4、仿形轮2-5几部分组成。仿形检测机构与机架采用铰接方式连接,同时仿形支杆上连接了仿形预紧弹簧杆2-3,它能够为仿形轮2-5的地面仿形提供弹力,仿形轮2-5经过高地面时,弹簧压缩;经过低地面时,弹簧为仿形轮2-5提供压力,对仿形检测机构高、低位置改变及时作出位移补偿,从而提高了仿形检测机构的反映速度,且可以通过螺母来调节预紧量来适应不同地表高度。为保证测量精度,尽可能降低振动对姿态检测装置2-2的影响,在姿态检测装置2-2底部安装减振垫片2-1。同时仿形预紧弹簧杆2-3也能够起到减震缓冲作用,为姿态检测装置2-2提供更可靠的数据采集。
[0024]
刀片控制部分如图3所示,包括所述仿形检测机构,主要部件分别为减震垫片2-1、姿态检测装置2-2、仿形预紧弹簧杆2-3、地轮3-1、液压缸3-2、粉碎刀片3-3等几部分。木薯茎杆粉碎还田机在垄面作业时,仿形检测机构在垄面进行实时仿形的同时姿态检测装置2-2对其进行姿态角度的实时检测。液压升降自动控制系统主要实现木薯茎杆粉碎还田机粉碎刀片离地间隙的自动控制功能,是提高木薯茎杆粉碎还田机作业效率的重要解决措施,为木薯茎杆粉碎还田机自动化发展提供了技术参考。当液压控制系统工作时,微处理器会根据从姿态检测装置2-2得到的姿态信息进行处理,随后发出控制信号给继电器。继电器的输出信号为开关信号,当从微处理器得到控制信号后继电器的常开触点或常闭触点动作,此时会将信号发送到电磁阀。当电磁阀接收到继电器开关信号后,会控制液压油的开关、流量以及换向,进而控制液压缸3-2的伸缩动作,以达到控制粉碎刀片3-3离地间隙目的。
[0025]
监测部分如图4所示,包括卫星定位装置1-1、车载终端1-2、微处理器、姿态检测装置2-2。其中卫星定位装置1-1用于接收、处理和发送定位信息给车载终端1-2;车载终端1-2分别与卫星定位装置1-1和微处理器以串口通信方式进行数据的接收和发送,车载终端1-2可实现数据的接收、处理、发送、显示功能,同时也实现行人机交互功能。微处理器负责接收来自姿态检测装置2-2的姿态信息,发送处理后的姿态信息给车载终端。姿态检测装置2-2负责采集仿形检测机构的姿态信息并发送到微处理器。
[0026]
本发明粉碎刀片离地间隙采用间接测量法,如图5所示,即车载终端1-2接收来自姿态检测装置2-2的姿态角度信息,同时由角度信息经过几何关系模型计算后得到粉碎刀片离地间隙并显示出来。姿态检测装置2-2安装固定于仿形检测机构,其检测对象为仿形检
测机构工作时的姿态信息。
[0027]
所述卫星定位装置1-1安装于拖拉机驾驶室顶部,用于定位信号的接收和发送。卫星定位装置1-1可将初始定位数据发送到车载终端1-2中,车载终端1-2会对接收到的初始定位数据进行解算,得到拖拉机1-3的作业速度、经纬度、海拔、作业轨迹等信息并实时显示。
[0028]
所述车载终端1-2安装于驾驶室内,可分别接收来自微处理器的姿态信息和卫星定位装置1-1的定位信息并显示。除了可实现人机交互功能外,同时车载终端1-2可对接收到的姿态信息进行相关数学运算,进一步得到木薯茎杆粉碎还田机粉碎刀片离地间隙。车载终端1-2主要由定位信息和姿态信息监测、粉碎刀片离地间隙预警、粉碎刀片离地间隙参数设置、粉碎刀片离地间隙实时参数曲线图、监测参数保存几个模块组成。
[0029]
所述姿态检测装置2-2安装固定于仿形检测机构的仿形支杆2-4上,它负责采集仿形检测机构工作时仿形支杆2-4相对垂直方向角度,并将其发送到微处理器进行解算。
[0030]
所述减震垫片2-1安装于姿态检测装置2-2底部,它可保证姿态检测装置2-2测量精度,尽可能降低振动对姿态检测装置2-2的影响.
[0031]
所述仿形预紧弹簧2-3安装于仿形支杆2-4与前梁之间,分别于二者以铰接方式连接,它为仿形轮2-5的地面仿形提供弹力,可对仿形检测机构高、低位置改变及时作出位移补偿,可提高仿形检测机构的反映速度,且可以通过调节螺母的预紧量来适应不同地表高度。
[0032]
液压缸3-2安装于地轮3-1支撑杆位置,它为木薯茎杆粉碎还田机提供支撑力的同时,也可对粉碎刀片3-3进行自动调控。当垄面高于设定粉碎刀片3-3离地间隙范围时,此时液压缸3-2收缩,会使粉碎刀片3-3离地间隙减小,以达到所设定的粉碎刀片3-3离地间隙范围;当垄面低于设定粉碎刀片3-3离地间隙范围时,此时液压缸3-2伸长,会使粉碎刀片3-3离地间隙增大,以达到所设定的粉碎刀片3-3离地间隙范围。
[0033]
虽然本发明上述结合附图描述了本发明得实施方式,任何本发明所述技术领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,本发明凡等效或同等变换或改进所得得技术方案,这些变化均落入本发明的专利保护范围。本发明的专利保护范围均以所附的权利要求书为标准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1