一种用于工厂化育苗的温室钵苗自动移栽系统的制作方法
[0001]
本专利涉及一种自动化育苗技术领域,具体涉及一种用于工厂化育苗的温室钵苗自动移栽系统。
背景技术:
[0002]
近年来,随着温室及蔬菜大棚等设施农业的快速发展,育苗移栽技术逐渐发展应用,其优越性也日益凸显,育苗移栽技术相比于传统播种技术,具有播种期不受限制、提高幼苗成活率、提高作物复种指数保证作物产量等优点。但目前育苗移栽技术多为人工完成,劳动强度大,劳动力成本高,因此,迫切需要提高育苗移栽技术自动化水平,以降低生产成本,提高设施农业生产效益。
[0003]
中国专利cn109673220a一种钵苗移栽机,包括第一传送台、第二传送台和钵苗移栽机构,所述第一传送台与第二传送台均设有植苗盘输送机构和植苗盘定位机构,所述钵苗移栽机构包括夹取装置,架设在第一传送台和第二传送台上,该发明通过第一传送台、第二传送台分别用以传送将供苗盘和植苗盘精确传送至移钵机构下的夹取装置,完成移栽作业。该装置能够完成钵苗间移栽作业,提高了钵苗移栽准确率及效率,但未进行苗株剔除及后续补种作业。
[0004]
有鉴于此,需要一种用于工厂化育苗的温室钵苗自动移栽系统,将剔苗、后续补苗及移栽作业环节进行整合,实现一套完整的工厂化育苗移栽的作业流程。目前这些中间环节各自独立并没有系统集成化,因此,用于工厂化育苗的温室钵苗自动移栽系统研究对于完善工厂自动化管理,提高生产效率及减轻劳动强度具有一定意义。
技术实现要素:
[0005]
针对上述现有移栽技术的不足,本发明提出一种集补苗作业与移栽作业与一体的用于工厂化育苗的温室钵苗自动移栽系统。
[0006]
本专利通过下列技术方案实现:该系统包括机架、图像检测装置、补苗装置、移钵装置和输送装置,来源穴盘进入图像检测装置,经右侧光电传感器ⅰ检测停止,安装于图像采集箱顶部的摄像头对来源穴盘进行缺苗、劣苗孔位检测;检测完成后来源穴盘进入补苗装置,经右侧光电传感器ⅱ检测停止后,补苗机械臂在图像检测信息指导下,带动补苗末端完成剔苗、补苗作业;补苗完成后来源穴盘进入移钵装置,经右侧光电传感器ⅲ检测停止后,移钵机械臂带动移钵末端将来源穴盘的优秀钵苗移栽至目标穴盘;输送带配合光电传感器ⅰ、ⅱ、ⅲ输运来源穴盘依次运行于各个环节,完成穴盘钵苗自动移栽作业;本发明集补苗作业与移栽作业于一体,提高了系统自动化及钵苗移栽作业效率。
[0007]
一种用于工厂化育苗的温室钵苗自动移栽系统,包括机架、图像检测装置、补苗装置、移钵装置和输送装置,其特征在于:所述图像检测装置由图像采集箱、摄像头、led补光灯带及光电传感器ⅰ组成,安装在图像检测箱右侧的光电传感器ⅰ检测到来源穴盘后,输送装置停止运动,安装在图像采集箱顶部中心处的摄像头进行缺苗、劣苗检测,检测过程中,
图像采集箱内布置的led补光灯带为摄像头提供光源;所述补苗装置包括补苗机械臂、补苗末端、供苗穴盘支撑架和光电传感器ⅱ,补苗机械臂为直角坐标机械臂,来源穴盘进入补苗环节,经光电传感器ⅱ检测停止,补苗机械臂在图像检测信息指导下,带动补苗末端对缺苗、劣苗穴孔进行剔除作业,同时,从供苗穴盘支撑架上方的供苗穴盘中补苗至来源穴盘;所述移钵装置包括移钵机械臂、变距机构、移钵末端、目标穴盘支撑架及光电传感器ⅲ,移钵机械臂与补苗机械臂结构相同,补苗完成后的来源穴盘进入移钵环节,经光电传感器ⅲ检测停止,移钵机械臂带动移钵末端将来源穴盘的优秀钵苗移栽至目标穴盘;所述输送装置包括输送带和输送辊,运送来源穴盘完成各环节作业任务。
[0008]
优选的,所述图像采集箱开口尺寸满足穴盘传输要求,四条led补光灯带两两对称布置在图像采集箱四周内壁上,保证摄像头采集图像的质量。
[0009]
优选的,所述气吸式末端与夹持式末端同时安装在末端安装板上,二者在水平方向安装距离满足独立作业要求;气吸式末端用于剔除缺苗穴孔,夹持式末端用于剔除劣苗穴孔及补苗。
[0010]
优选的,所述夹持式末端形式为单指双针式,构成取苗针,通过带有倾角的倒“l”型连接件安装在末端安装板,取苗针斜插进钵体,完成剔苗、补苗工作。
[0011]
优选的,所述夹持式末端前端设置“l”型挡苗板,夹持苗钵时对苗株进行保护。
[0012]
优选的,所述供苗穴盘支撑架、目标穴盘支撑架左右两侧结构为压板式,安装在输送带正上方,减小机械臂作业空间;同时防止夹持式末端、移钵末端作业时引起穴盘抖动。
[0013]
优选的,所述变距机构安装在移钵机械臂上,移钵机械臂带动对称分布在变距机构上的若干移钵末端同时工作,将来源穴盘的优秀苗株移栽至目标穴盘,完成移栽作业;移钵末端与夹持式末端整体结构一致。
[0014]
优选的,所述来源穴盘进入图像检测装置,识别缺苗、劣苗孔位;补苗环节中补苗机械臂进行剔苗、补苗操作;移钵机械臂将来源穴盘中的优秀苗株移栽至目标穴盘,完成钵苗自动移栽作业流程。
[0015]
与现有技术相比,本发明具有以下有益效果,本发明提供了一种用于工厂化育苗的温室自动移栽系统,能够实现育苗环节中剔苗、补苗及移栽作业的自动一体化,提高作业效率,保证育苗的优选性及高效性。
附图说明
[0016]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显。
[0017]
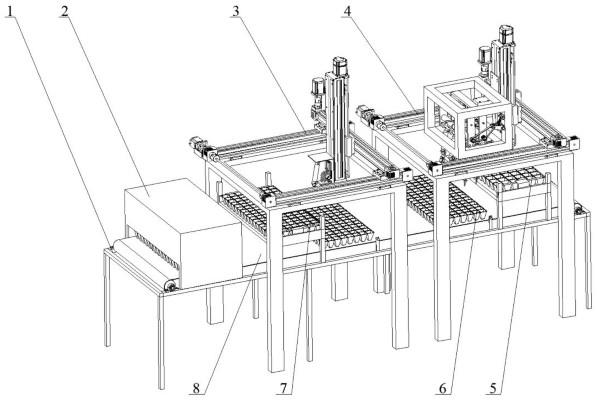
图 1为一种用于工厂化育苗的温室自动移栽系统整体结构示意图;图 2为一种用于工厂化育苗的温室自动移栽系统整体结构主视图;图 3为图像检测装置2的结构剖视图;图 4为补苗装置3的结构示意图;图 5为移钵装置4的结构示意图;图 6为夹持式末端303的结构示意图。
[0018] 以下是图中各部件标号:机架1、图像检测装置2、补苗装置3、移钵装置4和输送装置8、图像采集箱201、摄像头202、led补光灯带203、光电传感器
ⅰꢀ
204、补苗机械臂301、气吸
式末端302、夹持式末端303、供苗穴盘支撑架304、光电传感器
ⅱꢀ
305、末端安装板303a、连接件303b、挡苗板303c、取苗针303d、移钵机械臂401、变距机构402、移钵末端403、目标穴盘支撑架404、光电传感器
ⅲꢀ
405。
具体实施方式
[0019]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0020]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、
ꢀ“
顶”、“底”、“内”、
ꢀ“
外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0021]
如图1、2、3、4、5、6所示,本专利的一种用于工厂化育苗的温室自动移栽系统,包括机架1、图像检测装置2、补苗装置3、移钵装置4和输送装置8、图像采集箱201、摄像头202、led补光灯带203、光电传感器
ⅰꢀ
204、补苗机械臂301、气吸式末端302、夹持式末端303、供苗穴盘支撑架304、光电传感器
ⅱꢀ
305、取苗针303d、连接件303b、末端安装板303a、取苗针303d、挡苗板303c、移钵机械臂401、变距机构402、移钵末端403、目标穴盘支撑架404、光电传感器
ⅲꢀ
405。其中:所述图像检测装置包括图像采集箱201、摄像头202、led补光灯带203及光电传感器
ⅰꢀ
204,安装在图像检测箱201右侧的光电传感器
ⅰꢀ
204检测到来源穴盘6后,输送装置8停止运动,安装在图像采集箱201顶部的摄像头202进行缺苗、劣苗检测,检测过程中,图像采集箱201内布置的led补光灯带203为摄像头202提供光源;图像检测完成后,来源穴盘6进入补苗装置3;补苗装置3包括补苗机械臂301、气吸式末端302、夹持式末端303、供苗穴盘支撑架304和光电传感器
ⅱꢀ
305,来源穴盘6经光电传感器
ⅱꢀ
305检测停止,补苗机械臂301在图像检测信息指导下,带动气吸式末端302和夹持式末端303对缺苗、劣苗穴孔进行剔除作业,剔苗作业完成后,补苗机械臂301带动夹持式末端303从供苗穴盘支撑架304上方的供苗穴盘7中补苗至来源穴盘6;补苗完成后,满载优秀钵苗的来源穴盘6进入移钵装置4;移钵装置4包括移钵机械臂401、变距机构402、移钵末端403、目标穴盘支撑架404及光电传感器
ⅲꢀ
405,移钵机械臂401与补苗机械臂301结构相同,来源穴盘6经光电传感器
ⅲꢀ
405检测停止,移钵机械臂401带动移钵末端402将来源穴盘6中的优秀钵苗移栽至目标穴盘5;输送装置8包括输送带801和输送辊802,运送来源穴盘6完成各环节作业任务。
[0022]
具体工作过程:工作时,来源穴盘6放置于输送带801上,通过输送辊802的旋转作用带动输送带801上的来源穴盘6进入图像检测装置2,光电传感器
ⅰꢀ
204检测到来源穴盘6后,输送装置8停止运动,图像采集箱201顶部的摄像头202进行缺苗、劣苗检测,用以后续剔苗及补苗工作,检测完成后,来源穴盘6继续运动,进入补苗装置3,光电传感器
ⅱꢀ
305检测到来源穴盘6后,输送装置8停止运动,补苗机械臂301在图像检测信息指导下,带动气吸式末端302和夹持式末端303对缺苗、劣苗穴孔进行剔除,剔苗作业完成后,补苗机械臂301带动夹持式末端303从供苗穴盘支撑架304上方的供苗穴盘7中补苗至来源穴盘6,补苗完成后,满载优秀钵苗的来源穴盘6继续运动,进入移钵装置4,光电传感器
ⅲꢀ
405检测到来源穴盘6后,输送装置8停止运动,移钵机械臂401带动移钵末端402将来源穴盘6中的优秀钵苗移栽至目标穴盘支撑架404
上的目标穴盘5,完成钵苗自动移栽作业流程。
[0023]
所述图像采集箱开口尺寸满足穴盘传输要求,四条led补光灯带两两对称布置在图像采集箱四周内壁上,保证摄像头采集图像的质量。
[0024]
所述气吸式末端与夹持式末端同时安装在末端安装板上,二者在水平方向安装距离满足独立作业要求。气吸式末端适于吸取松散的钵体,用于剔除缺苗穴孔,夹持式末端适于夹持具有根系凝聚作用的苗钵,用于剔除劣苗穴孔及补苗。
[0025]
所述气吸式末端通过双轴气缸上下升降进行作业,夹持式末端工作时,气吸式末端保持静止,处于最高位置处,气吸式末端工作时,双轴气缸下降至最低位置处进行作业,作业结束后上升至静止状态位置。
[0026]
所述夹持式末端形式为单指双针式,构成取苗针,通过带有倾角的倒“l”型连接件安装在末端安装板,取苗针斜插进钵体,完成剔苗、补苗工作。
[0027]
所述夹持式末端前端设置“l”型挡苗板,夹持苗钵时对苗株进行保护。
[0028]
所述供苗穴盘支撑架、目标穴盘支撑架左右两侧结构为压板式,安装在输送带正上方,减小机械臂作业空间;同时防止夹持式末端、移钵末端作业时引起穴盘抖动。
[0029]
所述变距机构安装在移钵机械臂上,移钵机械臂带动对称分布在变距机构上的若干移钵末端同时工作,将来源穴盘的优秀苗株移栽至目标穴盘,完成钵苗自动移栽作业流程。
[0030]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1