一种可旋转光源的光刺激搭载装置及其方法
1.本发明涉及生物控制技术领域,尤其涉及一种可旋转光源的光刺激搭载装置及其方法。
背景技术:
2.人类通过控制技术施加相关信号调控生物运动行为从而实现人类可操控的生物机器人,主要应用于生态环境研究、地貌地形勘探、灾难搜索救援、反恐侦查等方面,具有广泛的应用前景。
3.随着生物控制技术的快速发展,对生物机器人进行光刺激而实现生物控制也成为一种崭新的重要技术手段。重庆大学设计了一种基于超声波刺激融合表皮电刺激和led光辅助刺激的无创伤老鼠运动控制系统,该系统采用外部刺激源的穿戴式刺激方式实现老鼠的运动控制(皮喜田,徐林,周升山等,无创伤老鼠生物机器人的运动控制[j].机器人,2011,(01):73
‑
78.);燕山大学公开了一种立体光刺激搭载装置(cn207201733u),该装置主要适用于暗光环境中鲤鱼水生动物机器人水下运动的控制,可对鲤鱼机器人进行多方位、多角度的光刺激,但需要对不同波长的led进行更换;燕山大学公开了一种用于鲤鱼机器人运动控制的光刺激搭载装置及方法(cn110710478a),该装置采用遮光带和两侧的鱼鳍固定带,在有光或无光条件下皆可进行鲤鱼机器人的光控实验,但需要将led安插在跳线板处,在更换不同波长led时需拆卸与安装跳线板,而拆卸跳线板时固定带和鱼鳍固定带则容易脱落,操作较为繁琐。因此,现有的技术手段中均存在一定的缺陷和不足,还具有进一步提升和完善的空间。
技术实现要素:
[0004]
针对上述问题,本发明的目的在于提供一种通过将一个可旋转光源的光刺激搭载装置搭载多种波长led的方式来解决跳线板和led拆卸频繁、光刺激装置易脱落以及对生物机器人造成脑损伤等问题的一种可旋转光源的光刺激搭载装置及其方法。
[0005]
本发明采用的技术方案如下:
[0006]
本发明所提出的一种可旋转光源的光刺激搭载装置,所述装置包括搭载板、同心通线管、旋转组件、led、排母、排针、紧固螺丝、螺钉和导线;所述搭载板左右两侧对称设置有圆形孔,所述同心通线管分别对称嵌入在两侧圆形孔的底部,所述旋转组件分别转动连接在两侧同心通线管的底部,所述紧固螺丝设置在旋转组件中心处,用于将旋转组件固定在同心通线管底部,每个所述旋转组件的底部边缘均设置有四个呈圆周均匀分布且不同波长的led,且两侧旋转组件底部的led之间两两波长相同,所述排母对称设置在搭载板中部上方前后两端的边缘,所述排针分别连接在前后两端的排母内,且前端排针分别通过排母与各led正极对应连接,后端排针分别通过排母与各led负极对应连接,所述螺钉分别固定连接在搭载板中部的前后两侧,所述导线通过同心通线管后一端焊接在led的引脚处,另一端焊接在排母的引脚处。
[0007]
进一步的,所述旋转组件为十字形结构,所述四个led呈圆周均布的分别焊接在旋转组件四个端部的下方,所述旋转组件中部与同心通线管同轴转动连接,且所述旋转组件中心处设置有紧固螺丝,用于将旋转组件与同心通线管进行固定。
[0008]
进一步的,所述led均采用10mmled,且所述led的波长范围为455
‑
780nm。
[0009]
一种可旋转光源的光刺激搭载装置的搭载方法,其特征在于,所述方法包括以下步骤:
[0010]
步骤s1:选取一尾体重1.05kg、体长34.50cm的健康成年鲤鱼放置于丁香酚溶液中进行药浴浅麻醉,再放于实验台固定;
[0011]
步骤s2:将蓝、绿、黄、红四种不同波长的led分别焊接在十字型旋转组件上,将穿过同心通线管的导线与各led正负极引脚焊接,并分别用紧固螺丝将两侧的旋转组件固定在同心通线管底部;
[0012]
步骤s3:将两个排母焊接在搭载板的前后两端边缘处,制作两个连接导线的八针单排排针,连接电源,检查电路是否导通;
[0013]
步骤s4:顺时针或逆时针转动十字形旋转组件,将所需波长的led转动到指定光刺激位置,并用紧固螺丝固定旋转组件;
[0014]
步骤s5:利用螺钉将装置固定在鲤鱼头部额骨处;
[0015]
步骤s6:对装置进行通电,将鲤鱼机器人放于水中进行水下光控试验;
[0016]
步骤s7:如需更换其它波长led进行光控实验时,将鲤鱼机器人从水中捞出,将鲤鱼机器人放置于实验台固定,拆卸紧固螺丝,转动旋转组件,将所需的其他波长led转动到光刺激位置,并安装紧固螺丝固定旋转组件;
[0017]
步骤s8:再次对装置进行通电,将鲤鱼机器人放于水中进行其它波长led的光刺激水下运动控制实验。
[0018]
本发明与现有技术相比具有以下有益效果:
[0019]
本发明应用光控方法作为鲤鱼水生动物机器人运动控制的一种技术手段,可有效避免开颅手术对鲤鱼颅脑造成的机械损伤、出血、水肿、炎症等损伤效应,同时解决了使用不同波长led光刺激鲤鱼机器人的装置搭载问题,既可方便地将所需波长的led旋转到指定的光刺激位置,又能减少拆卸与安装光刺激搭载装置对动物造成的脑损伤,可更便捷的对水生动物机器人进行光控实验,具有非常高的实际应用价值。
附图说明
[0020]
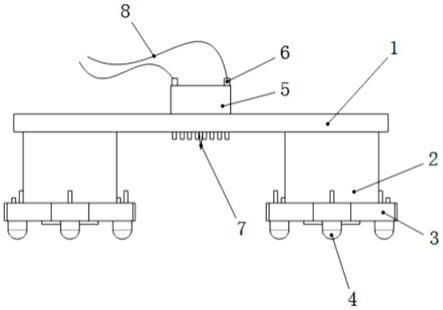
图1是本发明所提出的一种可旋转光源的光刺激搭载装置一个实施例的主视结构示意图;
[0021]
图2是图1的侧视结构示意图;
[0022]
图3是图1的仰视结构示意图;
[0023]
图4是图1的俯视结构示意图。
[0024]
其中,附图标记:1
‑
搭载板;2
‑
同心通线管;3
‑
旋转组件;4
‑
led;5
‑
排母;6
‑
排针;7
‑
螺钉;8
‑
导线;9
‑
紧固螺丝;10
‑
圆形孔。
具体实施方式
[0025]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0026]
需要说明的是,在本发明的描述中,术语“上”、“下”、“顶部”、“底部”、“一侧”、“另一侧”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指装置或元件必须具有特定的方位、以特定的方位构造和操作。
[0027]
参见附图1至4,给出了本发明所提出的一种可旋转光源的光刺激搭载装置一个实施例的具体结构。所述装置包括搭载板1、同心通线管2、旋转组件3、led4、排母5、排针6、螺钉7、导线8和紧固螺丝9。
[0028]
本实施例中,所述搭载板1为长100mm、宽40mm、厚5mm的矩形万能板,所述搭载板1的左右两侧对称开设有圆形孔10,所述同心通线管2高20mm、直径25mm,分别对称嵌入在两侧圆形孔10的底部,用于穿过导线8,所述旋转机3分别转动连接在两侧同心通线管2的底部,每个所述旋转组件3的底部边缘均设置有四个呈圆周均布且不同波长的led4,且两侧旋转组件3底部的四个led4之间两两波长相同,即两侧旋转组件3底部共设置有八个led4,左侧四个led4和右侧四个led4之间两两波长相同。
[0029]
所述旋转组件3采用十字形结构,其四个端部均设置限位槽,四个led4呈圆周均布的分别焊接在旋转组件3四个端部的限位槽内,所述旋转组件3中部与同心通线管2同轴转动连接,且所述旋转组件3中心处设置有紧固螺丝9,用于将旋转组件3与同心通线管2进行固定,为了不使导线8缠绕,旋转组件顺时针或逆时针皆可旋转,即可双向旋转,转动至指定的光源位置后通过紧固螺丝9固定,即可减少因多次拆卸与安装光刺激搭载装置而对动物造成的脑损伤;所述排母5对称设置在搭载板1中部上方的前后两端,距离边缘5mm处,所述排针6分别连接在前后两端的排母5内,本实施例中,前后两端排母5内的排针6均为八针单排排针,且前端排针6分别通过排母与各led4的正极对应连接,后端排针6分别通过排母5与各led4的负极对应连接,所述螺钉7钉帽直径2mm、钉脚直径1mm、钉脚长度7mm,所述螺钉7分别固定连接在搭载板1中部的前后两侧,用于将装置整体固定在鲤鱼头部额骨处,所述导线8通过同心通线管2后一端焊接在led4的引脚处,另一端焊接在排母5的引脚处。
[0030]
所述led4均采用10mmled,且所述led4的波长范围均为455
‑
780nm,以便研究同种发光强度不同波长的led光刺激对水生动物机器人运动行为的影响。
[0031]
一种可旋转光源的光刺激搭载装置的搭载方法,所述方法包括以下步骤:
[0032]
步骤s1:选取一尾体重1.05kg、体长34.50cm的健康成年鲤鱼放置于丁香酚溶液中进行药浴浅麻醉,再放于实验台固定;
[0033]
步骤s2:将蓝、绿、黄、红四种不同波长的led4分别焊接在左右两侧十字形旋转组件3的底部,将穿过同心通线管2的导线8与led4正负极引脚焊接,并分别通过紧固螺丝9将两侧的旋转组件3固定在同心通线管2下方;
[0034]
步骤s3:将两个排母5焊接在搭载板1中部前后两端的边缘处,并制作两个连接导线的八针单排排针6,连接电源,检查电路是否导通;
[0035]
步骤s4:顺时针或逆时针转动十字形旋转组件3,将所需波长的led转动到指定位置,如将蓝色led转动到光刺激位置,并通过紧固螺丝9固定旋转组件;
[0036]
步骤s5:利用螺钉7将可旋转光源的光刺激搭载装置横向固定在鲤鱼头部额骨处,两侧对应波长的led分别对准两侧鱼眼;
[0037]
步骤s6:对可旋转光源的光刺激搭载装置进行通电,将鲤鱼机器人放于水中进行水下光控试验;
[0038]
步骤s7:如需更换其它波长led进行光控实验时,将鲤鱼机器人从水中捞出,将鲤鱼机器人放置于实验台固定,拆卸紧固螺丝9,将旋转组件旋3转至所需的绿色led或黄色led或红色led,再通过安装紧固螺丝9固定旋转组件3;
[0039]
步骤s8:再次对可旋转光源的光刺激搭载装置进行通电,将鲤鱼机器人放于水中进行其它波长led光刺激水下运动的控制实验。
[0040]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1