一种手持式湿土地用辅助花生秧拔取装置的制作方法
1.本发明涉及农业种植技术领域,具体为一种手持式湿土地用辅助花生秧拔取装置。
背景技术:
2.落花生为豆科作物,优质食用油主要油料品种之一,又名“花生”或“长生果”,落花生是一年生草本植物。起源于南美洲热带、亚热带地区,约于十六世纪传入中国,十九世纪末有所发展,一年生草本。根部有丰富的根瘤,茎直立或匍匐,长30
‑
80厘米,茎和分枝均有棱,被黄色长柔毛,后变无毛,叶通常具小叶2对;托叶长2
‑
4厘米,具纵脉纹,被毛,叶柄基部抱茎,被毛,小叶纸质,卵状长圆形至倒卵形,先端钝圆形,有时微凹,具小刺尖头,基部近圆形,全缘,两面被毛,边缘具睫毛,花生在中国不同地区与其他作物组成一年一熟、二年三熟、一年二或三熟的种植制度,从而有春花生、麦套花生、夏花生和秋花生之分,广东个别地区还可种植冬花生,在水稻田中发展了部分花生种植,形成花生—水稻或水稻—花生的轮作制度,因此花生在我国各地都能够进行普遍种植,其在成熟后,因土块坚硬人工在进行拔取时较为繁琐,损耗了大量的人工劳动力。
3.对此,中国申请专利号:cn104067762b,本发明提供了一种伸缩齿式花生碎土拨秧装置,包括辊筒、旋转主轴、伸缩齿以及贯穿在旋转主轴上的辊筒固定盘、伸缩齿固定装置、和伸缩齿运动装置。旋转主轴设置在辊筒的中心,并通过主动链轮与动力装置相连。辊筒的表面设有通孔,伸缩齿的一端设置在辊筒内部,伸缩齿的另一端通过通孔设置在辊筒外部。辊筒固定盘的四周用螺栓与辊筒固定相连。花生碎土拨秧装置设置在输送装置的前端,可以将作物挖掘后的土块进行破碎,使土块细化,使输送过程中的土块减少,防止摘果装置的拥堵,同时便于清选,降低收获后的含土率。在碎土完成后,直接把花生秧拨到后方滑板从而落到输送装置上,减小了输送装置的宽度。其设置有辊筒、旋转主轴、伸缩齿以及贯穿在旋转主轴上的辊筒固定盘、伸缩齿固定装置、和伸缩齿运动装置,使得当在进行花生秧拔取时,花生碎土拨秧装置设置在输送装置的前端,可以将作物挖掘后的土块进行破碎,使土块细化,进而使得硬土在进行碎化后,方便对花生秧的拔取操作,大大节省了人工拔取的劳动力。
4.在对比专利中解决了通过人工在进行拔取花生秧时的强大劳动力,当前花生在成熟后若因长时间未降雨其土地过于坚硬通过人工进行花生秧拔取造成极大地劳动力,对比专利中其对硬土进行碎化后方便对花生秧进行拔取操作,其装置在进行工作时,容易通过旋转滚筒的工作对花生果实进行伤害,进而使得花生的果实产量容易进行降低。
5.现有技术中针对上述问题,因此亟需提出一种手持式湿土地用辅助花生秧拔取装置来解决上述的问题。
技术实现要素:
6.本发明的目的在于提供一种手持式湿土地用辅助花生秧拔取装置,以解决上述背
景技术中提出的当前花生秧在进行人工拔取时需要消耗大量的劳动力,且传统的拔取装置容易伤害花生果实的问题。
7.为实现上述目的,本发明提供如下技术方案一种手持式湿土地用辅助花生秧拔取装置,包括车体,所述车体的底部设置有转动轮,所述转动轮的上方固定安装有安装板,所述转动轮的左侧设置有控制夹取机构,所述控制夹取机构的底端外表面固定连接有张力链条,所述张力链条的外表面套设有伸缩套筒,所述控制夹取机构的上端外表面设置有伸缩气缸,所述安装板的上端设置有控制机构,所述控制机构的左侧安装有洒水器,所述张力链条的外表面套设有伸缩机构,所述车体的顶端设置有把手,所述控制夹取机构包括第一活动套筒,所述第一活动套筒固定安装在控制夹取机构的底端外表面,所述第一活动套筒的外表面插设有第一伸缩板,所述第一伸缩板的外表面啮合有控制齿轮,所述控制齿轮的右侧设置有第一齿轮,所述第一齿轮啮合在第一伸缩板的外表面,所述控制齿轮的上端外表面啮合有第二伸缩板,所述第二伸缩板的右侧外表面固定套设有第二活动套筒,所述第二伸缩板的上端外表面啮合有第二齿轮,所述第二齿轮和第一齿轮的外表面通过连接带套设连接有转动轴,所述转动轴的外表面固定安装有夹取杆,所述第一活动套筒和第二活动套筒通过螺丝固定安装在控制夹取机构的底端外表面,所述第一伸缩板与第一活动套筒滑动连接,所述第二伸缩板与第二活动套筒滑动连接,所述控制齿轮与第一齿轮水平设置在第一伸缩板的上表面,且控制齿轮与第一齿轮啮合连接,所述第二伸缩板与第二齿轮转动连接,所述控制齿轮与第二齿轮和第一齿轮组成整体活动机构。
8.优选的,所述转动轴设置有两组,所述转动轴通过连接带分别与第二齿轮和第一齿轮转动连接,所述夹取杆与转动轴转动连接,所述夹取杆垂直设置有两组,且夹取杆呈交叉排列,所述夹取杆的外表面为半弧形金属杆。
9.优选的,所述张力链条包括连接齿轮,所述连接齿轮的外表面啮合连接有金属链条,所述金属链条的左侧上方啮合连接有飞轮,所述飞轮的下方设置有导向轮,所述导向轮的下方设置有张力轮。
10.优选的,所述连接齿轮固定连接在伸缩套筒的底端外表面,所述连接齿轮与金属链条转动连接,所述导向轮与张力轮的外表面大小相同,所述飞轮、导向轮和张力轮通过连接齿轮与金属链条组成传动结构整体,所述飞轮的上端外表面固定连接在伸缩机构的底端外表面。
11.优选的,所述转动轮设置有两组,所述转动轮水平设置在车体的底端外表面,所述转动轮的外表面为圆形结构的橡胶轮,所述把手通过金属支撑杆与安装板固定连接,所述张力链条通过螺丝固定连接在安装板的顶端外表面。
12.优选的,所述控制机构包括往复电机,所述往复电机固定连接在安装板的顶端外表面,所述往复电机的左侧外表面固定连接有第一锥齿,所述第一锥齿的外表面啮合有第二锥齿,所述第二锥齿的底端外表面固定连接有转动杆。
13.优选的,所述第一锥齿与第二锥齿啮合连接,所述第二锥齿通过第一锥齿与往复电机转动连接控制,所述转动杆通过螺丝固定安装在第二锥齿的底端外表面,所述转动杆的底端外表面固定安装有伸缩套筒,所述转动杆的外表面为光滑结构的金属杆。
14.优选的,所述伸缩机构包括连接套,所述连接套的顶端外表面固定连接有第二丝杆,所述第二丝杆的外表面设置有活动板,所述第二丝杆的顶端外表面套设有固定块,所述
固定块的内部安装有第二丝套,所述连接套通过螺丝固定安装在控制齿轮的底端外表面。
15.优选的,所述连接套通过金属链条与控制齿轮进行转动连接控制,所述第二丝杆焊接在控制齿轮的上表面,所述第二丝套与第二丝杆的外表面相吻合,所述第二丝套与第二丝杆转动连接,且第二丝套设置有两组,所述第二丝套分别设置在第二丝杆的两侧外表面。
16.优选的,所述伸缩套筒包括安装螺栓,所述安装螺栓的外表面固定连接有安装座,所述安装座的内部设置有第一丝套,所述第一丝套的外表面插设有第一丝杆,所述第一丝套设置有两组,所述第一丝套设置在第一丝杆的左右两侧外表面,所述第一丝套与第一丝杆滑动连接,所述第一丝套通过螺丝固定安装在安装座的一侧外表面上。
17.与现有技术相比,本发明的有益效果是:
18.通过设置的控制夹取机构、控制机构、张力链条、伸缩套筒和把手使得当需要对花生秧进行拔取时,通过把手将装置推送到花生秧的正上方,通过往复电机的工作使得转动杆通过第二锥齿与第一锥齿的啮合连接进行转动控制,转动杆在进行转动后,使第一丝杆通过第一丝套的旋合连接使伸缩套筒进行伸缩往复运动控制,第一丝杆在进行转动后,通过连接齿轮的连接使得金属链条能够进行转动控制,此时飞轮进行转动,使控制齿轮通过飞轮进行共同转动,当控制齿轮在进行转动后,通过第一伸缩板与第二伸缩板的伸缩往复控制,使得转动轴能够进行反向转动控制,进而使得夹取杆能够对花生秧进行夹取操作,使得装置能够在通过控制夹取机构进行花生秧夹取控制的同时,进行垂直方向的伸缩运动,方便对花生秧的拔取,大大节省了人工的劳动力,提高了花生秧的拔取效率。
附图说明
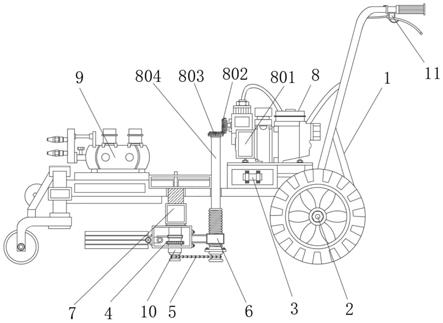
19.图1为本发明的结构侧视示意图;
20.图2为本发明的结构俯视示意图;
21.图3为本发明图1中控制夹取机构活动前的结构俯视示意图;
22.图4为本发明图1中控制夹取机构活动后的结构俯视示意图;
23.图5为本发明图1中伸缩机构的结构正视示意图;
24.图6为本发明图1中张力链条的结构俯视示意图;
25.图7为本发明图1中伸缩套筒的结构正视示意图
26.图中:1、车体;2、转动轮;3、安装板;4、控制夹取机构;401、第一活动套筒;402、第一伸缩板;403、控制齿轮;404、第一齿轮;405、第二伸缩板;406、第二活动套筒;407、第二齿轮;408、转动轴;409、夹取杆;5、张力链条;501、连接齿轮;502、飞轮;503、导向轮;504、张力轮;505、金属链条;6、伸缩套筒;601、安装螺栓;602、安装座;603、第一丝套;604、第一丝杆;7、伸缩气缸;8、控制机构;801、往复电机;802、第一锥齿;803、第二锥齿;804、转动杆;9、洒水器;10、伸缩机构;1001、连接套;1002、第二丝杆;1003、活动板;1004、固定块;1005、第二丝套;11、把手。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参阅图1
‑
7,本发明提供的一种实施例:
29.一种手持式湿土地用辅助花生秧拔取装置,包括车体1,车体1的底部设置有转动轮2,转动轮2的上方固定安装有安装板3,转动轮2的左侧设置有控制夹取机构4,控制夹取机构4的底端外表面固定连接有张力链条5,张力链条5的外表面套设有伸缩套筒6,控制夹取机构4的上端外表面设置有伸缩气缸7,安装板3的上端设置有控制机构8,控制机构8的左侧安装有洒水器9,张力链条5的外表面套设有伸缩机构10,车体1的顶端设置有把手11,控制夹取机构4包括第一活动套筒401,第一活动套筒401固定安装在控制夹取机构4的底端外表面,第一活动套筒401的外表面插设有第一伸缩板402,第一伸缩板402的外表面啮合有控制齿轮403,控制齿轮403的右侧设置有第一齿轮404,第一齿轮404啮合在第一伸缩板402的外表面,控制齿轮403的上端外表面啮合有第二伸缩板405,第二伸缩板405的右侧外表面固定套设有第二活动套筒406,第二伸缩板405的上端外表面啮合有第二齿轮407,第二齿轮407和第一齿轮404的外表面通过连接带套设连接有转动轴408,转动轴408的外表面固定安装有夹取杆409,第一活动套筒401和第二活动套筒406通过螺丝固定安装在控制夹取机构4的底端外表面,第一伸缩板402与第一活动套筒401滑动连接,第二伸缩板405与第二活动套筒406滑动连接,控制齿轮403与第一齿轮404水平设置在第一伸缩板402的上表面,且控制齿轮403与第一齿轮404啮合连接,第二伸缩板405与第二齿轮407转动连接,控制齿轮403与第二齿轮407和第一齿轮404组成整体活动机构,转动轴408设置有两组,转动轴408通过连接带分别与第二齿轮407和第一齿轮404转动连接,夹取杆409与转动轴408转动连接,夹取杆409垂直设置有两组,且夹取杆409呈交叉排列,夹取杆409的外表面为半弧形金属杆,当把手11在推动至花生秧正上方时,通过转动杆804的转动与张力链条5的连接使得控制齿轮403进行转动控制,控制齿轮403在进行转动后,通过第二伸缩板405与第一伸缩板402的啮合连接使第二齿轮407与第一齿轮404进行反方向转动控制,进而使得转动轴408能够进行转动,使夹取杆409能够进行活动,方便对花生秧的夹取控制。
30.张力链条5包括连接齿轮501,连接齿轮501的外表面啮合连接有金属链条505,金属链条505的左侧上方啮合连接有飞轮502,飞轮502的下方设置有导向轮503,导向轮503的下方设置有张力轮504,连接齿轮501固定连接在伸缩套筒6的底端外表面,连接齿轮501与金属链条505转动连接,导向轮503与张力轮504的外表面大小相同,飞轮502、导向轮503和张力轮504通过连接齿轮501与金属链条505组成传动结构整体,飞轮502的上端外表面固定连接在伸缩机构10的底端外表面,连接齿轮501在进行转动后,使得飞轮502、导向轮503和张力轮504进行共同转动控制,使得金属链条505在对控制夹取机构4和转动杆804进行连接时能够保证其处于绷紧状态,方便进行传动控制。
31.转动轮2设置有两组,转动轮2水平设置在车体1的底端外表面,转动轮2的外表面为圆形结构的橡胶轮,把手11通过金属支撑杆与安装板3固定连接,张力链条5通过螺丝固定连接在安装板3的顶端外表面,控制机构8包括往复电机801,往复电机801固定连接在安装板3的顶端外表面,往复电机801的左侧外表面固定连接有第一锥齿802,第一锥齿802的外表面啮合有第二锥齿803,第二锥齿803的底端外表面固定连接有转动杆804,第一锥齿802与第二锥齿803啮合连接,第二锥齿803通过第一锥齿802与往复电机801转动连接控制,
转动杆804通过螺丝固定安装在第二锥齿803的底端外表面,转动杆804的底端外表面固定安装有伸缩套筒6,转动杆804的外表面为光滑结构的金属杆,当往复电机801在进行工作后,通过第一锥齿802与第二锥齿803的啮合连接使转动杆804进行转动控制,从而使控制夹取机构4能够进行上下伸缩控制。
32.伸缩机构10包括连接套1001,连接套1001的顶端外表面固定连接有第二丝杆1002,第二丝杆1002的外表面设置有活动板1003,第二丝杆1002的顶端外表面套设有固定块1004,固定块1004的内部安装有第二丝套1005,连接套1001通过螺丝固定安装在控制齿轮403的底端外表面,连接套1001通过金属链条505与控制齿轮403进行转动连接控制,第二丝杆1002焊接在控制齿轮403的上表面,第二丝套1005与第二丝杆1002的外表面相吻合,第二丝套1005与第二丝杆1002转动连接,且第二丝套1005设置有两组,第二丝套1005分别设置在第二丝杆1002的两侧外表面,伸缩套筒6包括安装螺栓601,安装螺栓601的外表面固定连接有安装座602,安装座602的内部设置有第一丝套603,第一丝套603的外表面插设有第一丝杆604,第一丝套603设置有两组,第一丝套603设置在第一丝杆604的左右两侧外表面,第一丝套603与第一丝杆604滑动连接,第一丝套603通过螺丝固定安装在安装座602的一侧外表面上,连接套1001在通过张力链条5转动后,通过第二丝杆1002与第二丝套1005的旋合连接,使得控制夹取机构4能够进行上下伸缩的往复运动控制。
33.工作原理:当把手11在推动至花生秧正上方时,通过转动杆804的转动与张力链条5的连接使得控制齿轮403进行转动控制,控制齿轮403在进行转动后,通过第二伸缩板405与第一伸缩板402的啮合连接使第二齿轮407与第一齿轮404进行反方向转动控制,进而使得转动轴408能够进行转动,使夹取杆409能够进行活动,连接齿轮501在进行转动后,使得飞轮502、导向轮503和张力轮504进行共同转动控制,使得金属链条505在对控制夹取机构4和转动杆804进行连接时能够保证其处于绷紧状态,方便进行传动控制。
34.进而,当往复电机801在进行工作后,通过第一锥齿802与第二锥齿803的啮合连接使转动杆804进行转动控制,从而使控制夹取机构4能够进行上下伸缩控制,连接套1001在通过张力链条5转动后,通过第二丝杆1002与第二丝套1005的旋合连接,使得控制夹取机构4能够进行上下伸缩的往复运动控制,通过第一伸缩板402与第二伸缩板405的伸缩往复控制,使得转动轴408能够进行反向转动控制,进而使得夹取杆409能够对花生秧进行夹取操作,方便进行垂直方向的伸缩运动。
35.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1