一种用于采摘的剪切机械手
1.本发明涉及自动化机械采摘技术领域,尤其是涉及一种用于采摘的剪切机械手。
背景技术:
2.随着农业自动化的发展,现阶段已研发出众多的自动化机械采摘设备,目前机械采摘设备的收割部件大多采用大面积切割式结构,以提高收割效率,但是现有的机械采摘设备在采摘较小农作物(比如茶叶、经济花卉等高价农作物)时,一方面难以对这些农作物进行精准采摘,另一方面在采摘时容易导致采摘物的掉落,导致采摘损失较大。
技术实现要素:
3.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于采摘的剪切机械手,针对较小农作物的采摘,能够实现精准采摘,以及对采摘物的收集,从而降低采摘损失。
4.本发明的目的可以通过以下技术方案来实现:一种用于采摘的剪切机械手,包括安装支架,所述安装支架上安装有剪切收纳机构和驱动机构,所述切割收纳机构与驱动机构相连接,所述驱动机构连接有控制器,根据控制器输出的指令,所述驱动机构用于驱动剪切收纳机构的开合,以完成剪切动作;
5.所述剪切收纳机构用于对待采摘物执行剪切动作,以及用于收集剪切跌落后的采摘物。
6.进一步地,所述驱动机构包括工作气缸,所述工作气缸的推杆上安装有导杆连接头,所述导杆连接头连接有两根转动连杆,两根转动连杆通过铰链与剪切收纳机构相连接,工作气缸工作将推杆向下推出或向上收回时,导杆连接头带动两根转动连杆向下或向上运动,从而驱动剪切收纳机构完成剪切动作。
7.进一步地,所述导杆连接头与转动连杆活动连接。
8.进一步地,所述工作气缸通过电磁阀与控制器连接,控制器输出指令控制电磁阀的工作状态,从而控制工作气缸动作。
9.进一步地,所述剪切收纳机构包括相互交叉活动连接的两根执行手臂,两根执行手臂的顶端分别与驱动机构连接,两根执行手臂的底端分别固定连接有收纳抓斗,两个收纳抓斗相对设置,所述收纳抓斗的下部边缘安装有切割刀片。
10.进一步地,所述两根转动连杆分别通过铰链连接至两根执行手臂的顶端。
11.进一步地,所述安装支架具体为矩形框架,所述安装支架包括底座、四根机械手支架和两个轨道支架,所述四根机械手支架以两根为一组、对称地安装在底座的两端,两组机械手支架之间通过两根轨道支架相连接。
12.进一步地,所述铰链可移动地安装在轨道支架上。
13.进一步地,所述铰链上设置有用于限定两根执行手臂之间交叉角度的限位销。
14.进一步地,所述轨道支架上开设有腰型槽,所述限位销可移动地安装在腰型槽内。
15.与现有技术相比,本发明具有以下优点:
16.一、本发明通过在安装支架上安装相互连接的剪切收纳机构和驱动机构,并将驱动机构与控制器连接,使得驱动机构能够根据控制器的指令,驱动剪切收纳机构完成剪切动作,同时剪切收纳机构能够完成对剪切后采摘物的收纳,采用剪切机构和收纳结构的统一设计,使对农作物的采摘和收集简化为一个步骤执行,能够有效提高采摘效率,降低采摘损耗。
17.二、本发明在驱动机构设置工作气缸和转动连杆,在剪切收纳机构设置与转动连杆通过铰链连接的执行手臂,此外,将铰链通过限位销安装在轨道支架上,以此能够对执行手臂进行精准可控的开合控制,从而保证剪切收纳机构的切割刀片能够对较小农作物进行精准切割,实现精准采摘的目的。
18.三、本发明利用执行手臂末端相对设置的收纳抓斗,并将切割刀片设置在收纳抓斗的下部边缘,使得切割采摘后的农作物能够直接被收集于收纳抓斗内,避免切割后发生采摘物跌落的现象、降低采摘损失。
附图说明
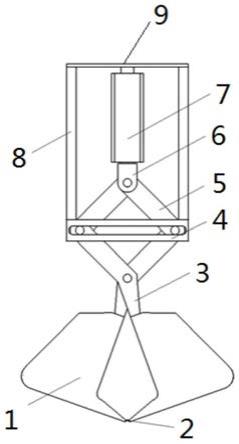
19.图1为本发明的前视结构示意图;
20.图2为本发明中剪切收纳机构闭合时结构示意图;
21.图3为本发明中剪切收纳机构打开时结构示意图;
22.图中标记说明:1、收纳抓斗;2、切割刀片;3、执行手臂;4、轨道支架;5、转动连杆;6、导杆连接头;7、工作气缸;8、机械手支架;9、底座。
具体实施方式
23.下面结合附图和具体实施例对本发明进行详细说明。
24.实施例
25.如图1所示,一种用于采摘的剪切机械手,包括安装支架,安装支架上安装有剪切收纳机构和驱动机构,切割收纳机构与驱动机构相连接,驱动机构连接有控制器,根据控制器输出的指令,驱动机构用于驱动剪切收纳机构的开合,以完成剪切动作;剪切收纳机构用于对待采摘物执行剪切动作,以及用于收集剪切跌落后的采摘物。
26.其中,剪切收纳机构包括相互交叉活动连接的两根执行手臂3,两根执行手臂3的顶端分别与驱动机构连接,两根执行手臂3的底端分别固定连接有收纳抓斗1,两个收纳抓斗1相对设置,收纳抓斗1的下部边缘安装有切割刀片2;
27.驱动机构包括工作气缸7,工作气缸7的推杆上安装有导杆连接头6,导杆连接头6活动连接有两根转动连杆5,两根转动连杆5通过铰链与剪切收纳机构相连接,即两根转动连杆5分别通过铰链连接至两根执行手臂3的顶端,工作气缸7工作将推杆向下推出或向上收回时,导杆连接头6带动两根转动连杆5向下或向上运动,从而驱动剪切收纳机构完成剪切动作,为实现对剪切收纳机构的精准开合控制,工作气缸7通过电磁阀与控制器连接,控制器输出指令控制电磁阀的工作状态,从而控制工作气缸动作;
28.安装支架具体为矩形框架,安装支架包括底座9、四根机械手支架8和两个轨道支架4,四根机械手支架8以两根为一组、对称地安装在底座9的两端,两组机械手支架8之间通
过两根轨道支架4相连接,为限定剪切收纳机构的开合角度,铰链上设置有用于限定两根执行手臂3之间交叉角度的限位销,而轨道支架4上则开设有腰型槽,限位销可移动地安装在腰型槽内。
29.当工作气缸7的推杆未推出,处于初始位置时,带有收纳抓斗1和切割刀片2的两组执行手臂3处于闭合状态(如图2所示)。当需要对农作物进行采摘时,控制器控制工作气缸7工作,将推杆推出,在两组转动连杆5和执行手臂3的传动工作下,安装在收纳抓斗1下方的两组切割刀片2打开(如图3所示),整个装置对着需要剪切的农作物下降,到需要的位置后,控制器控制工作气缸7再次工作,将推杆收回,在两组转动连杆5和执行手臂3的传动工作下,安装在收纳抓斗1下方的两组切割刀片2合拢,将农作物切割下来,同时采摘的农作物落入合拢的收纳抓斗1内。
30.在实际应用中,为进一步保证采摘物的可靠收集,还可对收纳抓斗的外形进行改进,使收纳抓斗合拢时缝隙更小,以避免采摘的农作物从缝隙中漏出。
31.综上所述,本发明设计了一种带抓斗的剪切机械手,用于对茶叶、经济花卉等农作物进行精确采摘与收集,通过在执行手臂下方安装收纳抓斗,用以收纳切割下来的采摘物,减少工作损失。该技术方案依靠较为简易的机械结构、较为低廉的制造成本和使用成本,有利于需要精确采摘的自动化采摘设备的推广和普及,降低了人工成本,将剪切机构和收纳结构结合为一体,有利于降低采摘损耗,提高经济效益。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1