一种基于物联网的用于园林果实采摘的智能机械装置的制作方法
1.本发明属于水果采摘技术领域,具体涉及一种基于物联网的用于园林果实采摘的智能机械装置。
背景技术:
2.水果,是指多汁且主要味觉为甜味和酸味,可食用的植物果实。水果不但含有丰富的维生素营养,而且能够促进消化,水果是我国重要的经济作物,目前水果已成为继粮食,蔬菜之后的第三大农作物,水果产业在国民经济中具有重要位置,在食品消费结构中,随着主要消费食品的下降和副食品比重的上升,水果消费在整个食物消费中的比重也逐步上升。据资料数据显示苹果、橘子和梨是我国水果主要种植品种,无论是面积和产量居世界前三,但是21世纪以来人口老龄化严重,而却随着工业的发展,农业劳动力逐渐向工业方面转移,农业劳动力严重短缺,用人成本逐渐提高,因此需要发展可自动进行采摘果实的智能机械来代替大部分人工,减少生产成本。
3.与现有技术相比较存在的问题:现有的此类装置,在采摘过程中通过郭匡对采摘机械臂采摘下来的果实进行收集,当果筐装满后,需要人工将果筐搬运到地面后更换新的果筐,随着采摘工作的进行,大量装满后的果筐被分散的放置在果园内,后续收集较为不便,难以快速的转运至运输车辆上,需要耗费大量的人力和时间,严重影响采摘工作效率。
技术实现要素:
4.为解决上述背景技术中提出的问题。本发明提供了一种基于物联网的用于园林果实采摘的智能机械装置,通过果筐转移机械装置、果筐承接装置、码垛机械装置和多功能装载车的设置,相较于现有装置,本装置可自动将装满后的果筐进行转移的同时,利用装载车厢直接对装满的果筐进行运载,当装载车厢满载后,打开左侧挡板,即可将装载车厢中装满果实的果筐集中卸下或直接转移到运输车辆上,大大节约了人力,有效提高了采摘工作效率。
5.为实现上述目的,本发明提供如下技术方案:一种基于物联网的用于园林果实采摘的智能机械装置,包括电动履带底盘,所述电动履带底盘的顶部固定安装有安装平台,所述履带底盘的内部安装有履带用动力电池仓和与履带驱动轮轴固定连接的驱动电机,所述安装平台的顶部安装有视觉采摘机械系统,所述安装平台的顶部设有称重及限位装置,所述称重及限位装置上放置有果筐,所述果筐的左右两侧均开有搬运用的扣手通孔,所述安装平台的顶部固定安装有果筐转移机械装置,所述电动履带底盘的后端通过牵引装置牵引有多功能装载车。
6.优选的,所述视觉采摘机械系统包括采摘机械及输送机构和采摘控制装置,所述采摘机械及输送机构和采摘控制装置均安装在转动平台上,所述转动平台的底部一体成型有转动轴,所述转动轴贯穿安装平台并与减速箱的输出轴固定连接,所述减速箱固定安装
在安装平台的底部,所述减速箱的输入轴与第一伺服电机的输出轴固定连接,第一伺服电机通过减速箱带动转动轴连同转动平台转动,使得采摘机械及输送机构和采摘控制装置均朝向果树的方向。
7.优选的,所述采摘机械及输送机构包括采摘机械臂,所述采摘机械臂的末端安装有采摘机械爪和液压剪,所述采摘机械臂位于采摘机械爪和液压剪的顶部安装有一号摄像机,所述一号摄像机的拍摄方向朝向采摘机械爪和液压剪,所述采摘机械臂的下方固定有输送软管卡接座,所述输送软管卡接座的顶部与采摘机械爪对齐,所述采摘机械臂上安装有输送软管放置座,所述输送软管放置座上搭有输送软管,所述输送软管的另一端与支撑固定架固定,所述支撑固定架的底部与第一滑块固定,所述第一滑块与第一滑轨滑动连接,所述第一滑轨的内部安装有第一传动丝杠,所述第一传动丝杠的右端与第二伺服电机固定连接,输送软管在采摘机械及输送机构朝向前方时其输入端与输送软管放置座固定,在进行采摘时,控制采摘机械及输送机构朝向果树,将输送软管放置座上的输送软管与输送软管卡接座进行固定,并控制第二伺服电机运转带动第一传动丝杠转动,通过螺旋传动带动第一滑块连同支撑固定架沿第一滑轨移动至果筐的上方,使输送软管的输出端对准果筐,第一pc机自动控制采摘机械臂带动采摘机械爪移动至果实处,对果实进行夹持,通过液压剪将果柄剪断,避免生拉硬拽对果实造成损伤,随后采摘机械爪松开,果实即落入输送管中,通过输送管落入果筐中,随后即可进行下一次采摘动作,当一个果筐装满暂停采摘后,第二伺服电机带动第一传动丝杠反向运转,使得支撑固定架复位,为果筐转移机械装置的工作提供空间。
8.优选的,所述采摘控制装置包括装置保护箱,所述装置保护箱的顶部安装有摄像机转向机构,所述摄像机转向机构的顶部安装有摄像照明一体装置,所述摄像照明一体装置上设有二号摄像机和led照明灯,所述装置保护箱的内腔安装有第一pc机,所述第一pc机的内部安装有第一无线通讯模块和图像处理模块,所述第一pc机与采摘机械及输送机构电性连接并对其进行自动控制,所述采摘控制装置还通过连接线与辅助摄像机电性连接,所述辅助摄像机的数量为个,均固定安装在安装平台的顶部,且所述辅助摄像机的底部均安装有摄像机转向机构,本装置在移动过程中,通过辅助摄像机对前方和左右两侧进行实时拍摄,拍摄画面传输至第一pc机中通过图像处理模块进行处理后,将画面通过第一无线通讯模块和第二无线通讯模块配合传输至第二pc机上并通过显示屏显示,辅助操作者控制本装置移动,减少盲区,移动到位后,对控制台内部的第二pc机和采摘控制装置中的第一pc机下达指令,进行采摘工作,第一pc机可自动控制采摘机械及输送机构,第一pc机通过第一无线通讯模块与第二pc机中的第二无线通讯模块无线通讯连接,进行图像和指令数据的传输,二号摄像机和辅助摄像机均可通过摄像机转向机构进行水平和俯仰方向角度的调节,摄像机转向机构包括一个转向台,转向台的顶部为安装座,安装座上安装有二号摄像机或辅助摄像机,通过安装座上安装的俯仰调节电机进行俯仰角的调节。
9.优选的,所述称重及限位装置包括电子秤盘,所述电子秤盘安装在秤盘安装装置的顶部,所述秤盘安装装置安装在安装平台的顶部,所述秤盘安装装置的内部安装有模数转换器,所述模数转换器与电子秤cpu电性连接,所述电子秤盘的顶部安装有四沿均设有限位凸起的承载盘,随着采摘的进行,果筐中的果实重量不断增加,重量通过称重及限位装置中的电子秤盘和模数转换器转换为数据传输至第二pc机,当果筐中的果实重量达到设置的
数值后,第二pc机自动对第一pc机下达指令,控制视觉采摘机械系统停止工作,且第二pc机对每个果筐中的果实重量进行记录。
10.优选的,所述果筐转移机械装置包括转移机械臂安装座,所述转移机械臂安装座的顶部安装有第一回转台,所述第一回转台的顶部安装有转移机械臂,所述转移机械臂的末端安装有果筐第一抓取装置,所述果筐第一抓取装置包括安装在转移机械臂最后一节侧面的第三伺服电机,所述第三伺服电机的输出轴末端贯穿入转移机械臂最后一节的内部并固定连接有第一锥形齿轮,所述第一锥形齿轮与第二锥形齿轮螺纹连接,所述第二锥形齿轮安装在旋转轴的顶部,所述旋转轴穿出转移机械臂的底端与果筐第一液压抓取机械爪安装板固定,所述果筐第一液压抓取机械爪安装板的两端安装有与果筐上的扣手通孔宽度相同的果筐第一液压抓取机械爪,且所述果筐第一液压抓取机械爪安装板的长度与果筐相同,筐转移机械装置通过第一回转台自动转动,转移机械臂带动果筐第一抓取装置移动至果筐的上方,并通过第三伺服电机带动第一锥形齿轮和第二锥形齿轮转动,进而带动旋转轴转动调节果筐第一液压抓取机械爪安装板的方向,使果筐第一液压抓取机械爪安装板与果筐的顶部对齐后下降至贴合果筐顶部中间位置,果筐第一液压抓取机械爪在液压驱动下转动插入果筐上的扣手通孔,与果筐上的扣手通孔配合,随后转移机械臂将果筐升起,并将果筐放置在承接板上。
11.优选的,所述多功能装载车包括安装在装载车底盘上的自动装载装置和控制区平台,所述控制区平台的顶部安装有控制台和设备电池仓,所述设备电池仓的顶部安装有太阳能电池板,所述太阳能电池板与设备电池仓中的电池电性连接,所述控制台上安装有控制键盘、控制遥杆和显示屏,所述控制台的内部安装有第二pc机,所述第二pc机的内部安装有第二无线通讯模块,所述第二无线通讯模块与第一无线通讯模块无线连接,多功能装载车的后侧下方还安装有站台,本装置使用过程中,通过控制台上的控制键盘和控制摇杆控制本装置通过由履带用动力电池仓提供动力的电动履带底盘进行移动以及下达指令,显示屏用于显示操作界面和各个摄像机拍摄的画面,可通过太阳能电池板进行发电,太阳能电池板将光能转化为电能传输至设备电池仓中,可一定程度上起到节能作用,而使用者在操控本装置工作时可站在站台上。
12.优选的,所述自动装载装置包括装载车厢、果筐承接装置和码垛机械装置,所述装载车厢的顶部安装有固定式的后侧挡板和右侧挡板,以及可通过铰接件进行开合的左侧挡板,左侧挡板可打开,方便人工对装载车厢中装载的果筐进行集中转移。
13.优选的,所述果筐承接装置包括安装在装载车厢底部的第二滑轨,所述第二滑轨的内部设有第二滑块,所述第二滑块的顶部安装有承接板,所述承接板与装载车厢的底板平齐,所述第二滑块被第二传动丝杠贯穿并与之螺旋传动连接,所述第二传动丝杠通过安装在第二滑轨前端的第四伺服电机进行驱动,第四伺服电机用于带动第二传动丝杠转动,进而带动第二滑块连同承接板向安装平台的方向平移,转移机械臂将果筐放置在承接板上,此时可将新的果筐放置在称重及限位装置上的承载盘上,随后第四伺服电机带动承接板收回,此时码垛机械装置开始工作。
14.优选的,所述码垛机械装置包括安装在装载车厢的右侧挡板上的码垛机械臂安装座,所述码垛机械臂安装座的顶部安装有第二回转台,所述第二回转台的顶部安装有码垛机械臂,所述码垛机械臂的末端安装有果筐第二抓取装置,所述果筐第二抓取装置包括安
装在码垛机械臂最后一节侧面的第五伺服电机,所述第五伺服电机的输出轴末端贯穿入码垛机械臂最后一节的内部并固定连接有第三锥形齿轮,所述第三锥形齿轮与第四锥形齿轮螺纹连接,所述第三锥形齿轮安装在旋转轴的顶部,所述旋转轴穿出码垛机械臂的底端与果筐第二液压抓取机械爪安装板固定,所述果筐第二液压抓取机械爪安装板的两端安装有与果筐上的扣手通孔宽度相同的果筐第二液压抓取机械爪,且果筐第二液压抓取机械爪安装板的长度与果筐相同,码垛机械装置通过第二回转台带动码垛机械臂连同果筐第二抓取装置移动至果筐的上方,并通过第五伺服电机带动第三锥形齿轮和第四锥形齿轮转动,进而带动旋转轴转动调节果筐第二液压抓取机械爪安装板的方向,使果筐第二液压抓取机械爪安装板与果筐的顶部对齐后下降至贴合果筐顶部,果筐第二液压抓取机械爪在液压驱动下转动插入果筐上的扣手通孔,与果筐上的扣手通孔配合,随后转移机械臂将果筐升起码放在装载车厢内。
15.与现有技术相比,本发明的有益效果是:本装置通过称重及限位装置可使果筐通过承载盘上的限位凸起进行稳固的放置的同时还可利用电子秤盘、模数转换器和电子秤cpu对果筐的重量进行实时称量,当果筐中的果实重量达到设置的数值后,第二pc机自动对第一pc机下达指令,控制视觉采摘机械系统停止工作,方便果筐的及时更换,并通过第二pc机对称重数据进行记录,方便对当日采摘量进行汇总统计的同时还可智能自动控制视觉采摘机械系统的启停。
16.本装置设有果筐转移机械装置、果筐承接装置、码垛机械装置和多功能装载车,称重及限位装置在将称重数据传输至第二pc季并通过第二pc机对称重数据进行记录后,通过第二pc机控制果筐转移机械装置通过第一回转台自动转动,转移机械臂带动果筐第一抓取装置移动至果筐的上方,并通过第三伺服电机带动第一锥形齿轮和第二锥形齿轮转动,进而带动旋转轴转动调节果筐第一液压抓取机械爪安装板的方向,使果筐第一液压抓取机械爪安装板与果筐的顶部对齐后下降至贴合果筐顶部中间位置,果筐第一液压抓取机械爪在液压驱动下转动插入果筐上的扣手通孔,与果筐上的扣手通孔配合,随后转移机械臂将果筐升起,同时第四伺服电机带动第二传动丝杠转动,进而带动第二滑块连同承接板向安装平台的方向平移,转移机械臂将果筐放置在承接板上,此时可将新的果筐放置在称重及限位装置上的承载盘上,随后第四伺服电机带动承接板收回,码垛机械装置开始工作,通过第二回转台带动码垛机械臂连同果筐第二抓取装置移动至果筐的上方,并通过第五伺服电机带动第三锥形齿轮和第四锥形齿轮转动,进而带动旋转轴转动调节果筐第二液压抓取机械爪安装板的方向,使果筐第二液压抓取机械爪安装板与果筐的顶部对齐后下降至贴合果筐顶部,果筐第二液压抓取机械爪在液压驱动下转动插入果筐上的扣手通孔,与果筐上的扣手通孔配合,随后转移机械臂将果筐升起码放在装载车厢内,即可继续进行采摘,当装载车厢满载后,打开左侧挡板,即可将装载车厢中装满果实的果筐集中卸下或直接转移到运输车辆上,方便后续的转移和装载,相较于现有装置,本装置可自动将装满后的果筐进行转移的同时,利用装载车厢直接对装满的果筐进行运载,当装载车厢满载后,打开左侧挡板,即可将装载车厢中装满果实的果筐集中卸下或直接转移到运输车辆上,大大节约了人力,有效提高了采摘工作效率;本装置使用过程中,可通过太阳能电池板进行发电,太阳能电池板将光能转化为电能传输至设备电池仓中,可一定程度上起到节能作用。
17.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
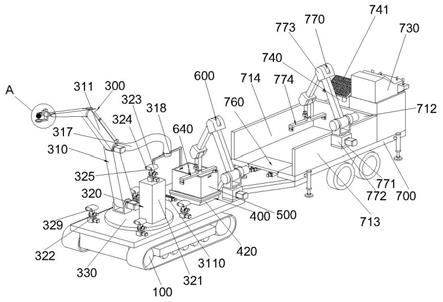
18.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明轴测结构示意图;图2为本发明右视结构示意图;图3为本发明电动履带底盘及视觉采摘机械系统正视示意图;图4为本发明电动履带底盘及视觉采摘机械系统左视示意图;图5为本发明电动履带底盘及视觉采摘机械系统未安装履带的右视示意图;图6为本发明电动履带底盘轴测示意图;图7为本发明多功能装载车未安装码垛机械装置的俯视示意图;图8为本发明多功能装载车未安装码垛机械装置的仰视示意图;图9为本发明多功能装载车局部右视剖视示意图;图10为本发明称重及限位装置及果筐右视剖视示意图;图11为本发明支撑固定架安装结构轴测示意图;图12为本发明支撑固定架安装结构正视示意图;图13为本发明果筐第一抓取装置结构示意图;图14为本发明果筐第一抓取装置结构示意图;图15为本发明a部放大示意图。
19.图中:100、电动履带底盘;110、履带用动力电池仓;120、驱动电机;200、安装平台;300、视觉采摘机械系统;310、采摘机械及输送机构;311、采摘机械臂;312、采摘机械爪;313、液压剪;314、一号摄像机;315、输送软管卡接座;316、输送软管放置座;317、输送软管;318、支撑固定架;319、第一滑块;3110、第一滑轨;3111、第一传动丝杠;3112、第二伺服电机;320、采摘控制装置;321、装置保护箱;322、摄像机转向机构;323、摄像照明一体装置;324、二号摄像机;325、led照明灯;326、第一pc机;327、第一无线通讯模块;328、图像处理模块;329、辅助摄像机;330、转动平台;340、转动轴;350、减速箱;360、第一伺服电机;400、称重及限位装置;410、电子秤盘;420、秤盘安装装置;421、模数转换器;422、电子秤cpu;430、承载盘;500、果筐;510、扣手通孔;600、果筐转移机械装置;610、转移机械臂安装座;620、第一回转台;630、转移机械臂;640、果筐第一抓取装置;641、第三伺服电机;642、第一锥形齿轮;643、第二锥形齿轮;644、果筐第一液压抓取机械爪安装板;645、果筐第一液压抓取机械爪;700、多功能装载车;710、自动装载装置;711、装载车厢;712、后侧挡板;713、右侧挡板;714、左侧挡板;720、控制区平台;730、控制台;731、控制键盘;732、控制遥杆;733、显示屏;734、第二pc机;735、第二无线通讯模块;740、设备电池仓;741、太阳能电池板;750、站台;760、果筐承接装置;761、第二滑轨;762、第二滑块;763、承接板;764、第二传动丝杠;765、第四伺服电机;770、码垛机械装置;771、码垛机械臂安装座;772、第二回转台;773、码垛机械臂;774、果筐第二抓取装置;7741、第五伺服电机;7742、第三锥形齿轮;7743、第四锥形齿轮;7744、果筐第二液压抓取机械爪安装板;7745、果筐第二液压抓取机械爪。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.实施例1请参阅图1
‑
图15,本发明提供以下技术方案:一种基于物联网的用于园林果实采摘的智能机械装置,包括电动履带底盘100,所述电动履带底盘100的顶部固定安装有安装平台200,所述履带底盘100的内部安装有履带用动力电池仓110和与履带驱动轮轴固定连接的驱动电机120,所述安装平台200的顶部安装有视觉采摘机械系统300,所述安装平台200的顶部设有称重及限位装置400,所述称重及限位装置400上放置有果筐500,所述果筐500的左右两侧均开有搬运用的扣手通孔510,所述安装平台200的顶部固定安装有果筐转移机械装置600,所述电动履带底盘100的后端通过牵引装置牵引有多功能装载车700。
22.本实施方案中:一种基于物联网的用于园林果实采摘的智能机械装置,包括电动履带底盘100,所述电动履带底盘100的顶部固定安装有安装平台200,所述履带底盘100的内部安装有履带用动力电池仓110和与履带驱动轮轴固定连接的驱动电机120,所述安装平台200的顶部安装有视觉采摘机械系统300,所述安装平台200的顶部设有称重及限位装置400,所述称重及限位装置400上放置有果筐500,所述果筐500的左右两侧均开有搬运用的扣手通孔510,所述安装平台200的顶部固定安装有果筐转移机械装置600,所述电动履带底盘100的后端通过牵引装置牵引有多功能装载车700。
23.具体的,所述视觉采摘机械系统300包括采摘机械及输送机构310和采摘控制装置320,所述采摘机械及输送机构310和采摘控制装置320均安装在转动平台330上,所述转动平台330的底部一体成型有转动轴340,所述转动轴340贯穿安装平台200并与减速箱350的输出轴固定连接,所述减速箱350固定安装在安装平台200的底部,所述减速箱350的输入轴与第一伺服电机360的输出轴固定连接,第一伺服电机360通过减速箱350带动转动轴340连同转动平台330转动,使得采摘机械及输送机构310和采摘控制装置320均朝向果树的方向。
24.具体的,所述采摘机械及输送机构310包括采摘机械臂311,所述采摘机械臂311的末端安装有采摘机械爪312和液压剪313,所述采摘机械臂311位于采摘机械爪312和液压剪313的顶部安装有一号摄像机314,所述一号摄像机314的拍摄方向朝向采摘机械爪312和液压剪313,所述采摘机械臂311的下方固定有输送软管卡接座315,所述输送软管卡接座315的顶部与采摘机械爪312对齐,所述采摘机械臂311上安装有输送软管放置座316,所述输送软管放置座316上搭有输送软管317,所述输送软管317的另一端与支撑固定架318固定,所述支撑固定架318的底部与第一滑块319固定,所述第一滑块319与第一滑轨3110滑动连接,所述第一滑轨3110的内部安装有第一传动丝杠3111,所述第一传动丝杠3111的右端与第二伺服电机3112固定连接,输送软管317在采摘机械及输送机构310朝向前方时其输入端与输送软管放置座316固定,在进行采摘时,控制采摘机械及输送机构310朝向果树,将输送软管放置座316上的输送软管317与输送软管卡接座315进行固定,并控制第二伺服电机3112运转带动第一传动丝杠3111转动,通过螺旋传动带动第一滑块319连同支撑固定架318沿第一滑轨3110移动至果筐500的上方,使输送软管317的输出端对准果筐500,第一pc机326自动
控制采摘机械臂311带动采摘机械爪312移动至果实处,对果实进行夹持,通过液压剪313将果柄剪断,避免生拉硬拽对果实造成损伤,随后采摘机械爪312松开,果实即落入输送管317中,通过输送管317落入果筐500中,随后即可进行下一次采摘动作,当一个果筐500装满暂停采摘后,第二伺服电机3112带动第一传动丝杠3111反向运转,使得支撑固定架318复位,为果筐转移机械装置600的工作提供空间。
25.具体的,所述采摘控制装置320包括装置保护箱321,所述装置保护箱321的顶部安装有摄像机转向机构322,所述摄像机转向机构322的顶部安装有摄像照明一体装置323,所述摄像照明一体装置323上设有二号摄像机324和led照明灯325,所述装置保护箱321的内腔安装有第一pc机326,所述第一pc机326的内部安装有第一无线通讯模块327和图像处理模块328,所述第一pc机326与采摘机械及输送机构310电性连接并对其进行自动控制,所述采摘控制装置320还通过连接线与辅助摄像机329电性连接,所述辅助摄像机329的数量为4个,均固定安装在安装平台200的顶部,且所述辅助摄像机329的底部均安装有摄像机转向机构322,本装置在移动过程中,通过辅助摄像机329对前方和左右两侧进行实时拍摄,拍摄画面传输至第一pc机326中通过图像处理模块328进行处理后,将画面通过第一无线通讯模块327和第二无线通讯模块735配合传输至第二pc机734上并通过显示屏733显示,辅助操作者控制本装置移动,减少盲区,移动到位后,对控制台730内部的第二pc机734和采摘控制装置320中的第一pc机326下达指令,进行采摘工作,第一pc机326可自动控制采摘机械及输送机构310,第一pc机326通过第一无线通讯模块327与第二pc机734中的第二无线通讯模块735无线通讯连接,进行图像和指令数据的传输,二号摄像机324和辅助摄像机329均可通过摄像机转向机构322进行水平和俯仰方向角度的调节,摄像机转向机构包括一个转向台,转向台的顶部为安装座,安装座上安装有二号摄像机324或辅助摄像机329,通过安装座上安装的俯仰调节电机进行俯仰角的调节。
26.具体的,所述称重及限位装置400包括电子秤盘410,所述电子秤盘410安装在秤盘安装装置420的顶部,所述秤盘安装装置420安装在安装平台200的顶部,所述秤盘安装装置420的内部安装有模数转换器421,所述模数转换器421与电子秤cpu422电性连接,所述电子秤盘410的顶部安装有四沿均设有限位凸起的承载盘430,随着采摘的进行,果筐500中的果实重量不断增加,重量通过称重及限位装置400中的电子秤盘410和模数转换器421转换为数据传输至第二pc机734,当果筐500中的果实重量达到设置的数值后,第二pc机734自动对第一pc机326下达指令,控制视觉采摘机械系统300停止工作,且第二pc机734对每个果筐500中的果实重量进行记录。
27.具体的,所述果筐转移机械装置600包括转移机械臂安装座610,所述转移机械臂安装座610的顶部安装有第一回转台620,所述第一回转台620的顶部安装有转移机械臂630,所述转移机械臂630的末端安装有果筐第一抓取装置640,所述果筐第一抓取装置640包括安装在转移机械臂630最后一节侧面的第三伺服电机641,所述第三伺服电机641的输出轴末端贯穿入转移机械臂630最后一节的内部并固定连接有第一锥形齿轮642,所述第一锥形齿轮642与第二锥形齿轮643螺纹连接,所述第二锥形齿轮643安装在旋转轴的顶部,所述旋转轴穿出转移机械臂630的底端与果筐第一液压抓取机械爪安装板644固定,所述果筐第一液压抓取机械爪安装板644的两端安装有与果筐500上的扣手通孔510宽度相同的果筐第一液压抓取机械爪645,且所述果筐第一液压抓取机械爪安装板644的长度与果筐500相
同,筐转移机械装置600通过第一回转台620自动转动,转移机械臂630带动果筐第一抓取装置640移动至果筐500的上方,并通过第三伺服电机641带动第一锥形齿轮642和第二锥形齿轮643转动,进而带动旋转轴转动调节果筐第一液压抓取机械爪安装板644的方向,使果筐第一液压抓取机械爪安装板644与果筐500的顶部对齐后下降至贴合果筐500顶部中间位置,果筐第一液压抓取机械爪645在液压驱动下转动插入果筐500上的扣手通孔510,与果筐500上的扣手通孔510配合,随后转移机械臂630将果筐500升起,并将果筐500放置在承接板763上。
28.具体的,所述多功能装载车700包括安装在装载车底盘上的自动装载装置710和控制区平台720,所述控制区平台720的顶部安装有控制台730和设备电池仓740,所述设备电池仓740的顶部安装有太阳能电池板741,所述太阳能电池板741与设备电池仓740中的电池电性连接,所述控制台730上安装有控制键盘731、控制遥杆732和显示屏733,所述控制台730的内部安装有第二pc机734,所述第二pc机734的内部安装有第二无线通讯模块735,所述第二无线通讯模块735与第一无线通讯模块327无线连接,多功能装载车700的后侧下方还安装有站台750,本装置使用过程中,通过控制台730上的控制键盘731和控制摇杆732控制本装置通过由履带用动力电池仓110提供动力的电动履带底盘100进行移动以及下达指令,显示屏733用于显示操作界面和各个摄像机拍摄的画面,可通过太阳能电池板741进行发电,太阳能电池板741将光能转化为电能传输至设备电池仓740中,可一定程度上起到节能作用,而使用者在操控本装置工作时可站在站台750上。
29.具体的,所述自动装载装置710包括装载车厢711、果筐承接装置760和码垛机械装置770,所述装载车厢711的顶部安装有固定式的后侧挡板712和右侧挡板713,以及可通过铰接件进行开合的左侧挡板714,左侧挡板714可打开,方便人工对装载车厢711中装载的果筐500进行集中转移。
30.具体的,所述果筐承接装置760包括安装在装载车厢711底部的第二滑轨761,所述第二滑轨761的内部设有第二滑块762,所述第二滑块762的顶部安装有承接板763,所述承接板763与装载车厢711的底板平齐,所述第二滑块762被第二传动丝杠764贯穿并与之螺旋传动连接,所述第二传动丝杠764通过安装在第二滑轨761前端的第四伺服电机765进行驱动,第四伺服电机765用于带动第二传动丝杠764转动,进而带动第二滑块762连同承接板763向安装平台200的方向平移,转移机械臂630将果筐500放置在承接板763上,此时可将新的果筐500放置在称重及限位装置400上的承载盘430上,随后第四伺服电机765带动承接板763收回,此时码垛机械装置770开始工作。
31.具体的,所述码垛机械装置770包括安装在装载车厢711的右侧挡板713上的码垛机械臂安装座771,所述码垛机械臂安装座771的顶部安装有第二回转台772,所述第二回转台772的顶部安装有码垛机械臂773,所述码垛机械臂773的末端安装有果筐第二抓取装置774,所述果筐第二抓取装置774包括安装在码垛机械臂773最后一节侧面的第五伺服电机7741,所述第五伺服电机7741的输出轴末端贯穿入码垛机械臂773最后一节的内部并固定连接有第三锥形齿轮7742,所述第三锥形齿轮7742与第四锥形齿轮7743螺纹连接,所述第三锥形齿轮7742安装在旋转轴的顶部,所述旋转轴穿出码垛机械臂773的底端与果筐第二液压抓取机械爪安装板7743固定,所述果筐第二液压抓取机械爪安装板7743的两端安装有与果筐500上的扣手通孔510宽度相同的果筐第二液压抓取机械爪7744,且果筐第二液压抓
取机械爪安装板7743的长度与果筐500相同,码垛机械装置770通过第二回转台772带动码垛机械臂773连同果筐第二抓取装置774移动至果筐500的上方,并通过第五伺服电机7741带动第三锥形齿轮7742和第四锥形齿轮7743转动,进而带动旋转轴转动调节果筐第二液压抓取机械爪安装板7743的方向,使果筐第二液压抓取机械爪安装板7743与果筐500的顶部对齐后下降至贴合果筐500顶部,果筐第二液压抓取机械爪7745在液压驱动下转动插入果筐500上的扣手通孔510,与果筐500上的扣手通孔510配合,随后转移机械臂630将果筐500升起码放在装载车厢711内。
32.本发明的工作原理及使用流程:本装置在使用时,操作人员可站在站台750上进行操作,将果筐500放置在称重及限位装置400上的承载盘430上,通过控制台730上的控制键盘731和控制摇杆732控制本装置通过由履带用动力电池仓110提供动力的电动履带底盘100进行移动,移动过程中,通过辅助摄像机329对前方和左右两侧进行实时拍摄,拍摄画面传输至第一pc机326中通过图像处理模块328进行处理后,将画面通过第一无线通讯模块327和第二无线通讯模块735配合传输至第二pc机734上并通过显示屏733显示,辅助操作者控制本装置移动,减少盲区,移动到位后,对控制台730内部的第二pc机734和采摘控制装置320中的第一pc机326下达指令,进行采摘工作,控制第一伺服电机360通过减速箱350带动转动轴340连同转动平台330转动,使得采摘机械及输送机构310和采摘控制装置320均朝向果树的方向,采摘控制装置320上的二号摄像机324通过摄像机转向机构322进行方向调节,同时控制与果树同侧的两个辅助摄像机329转向并进行俯仰角的调节,使其朝向果树,并将输送软管放置座316上的输送软管317与输送软管卡接座315进行固定,并控制第二伺服电机3112运转带动第一传动丝杠3111转动,通过螺旋传动带动第一滑块319连同支撑固定架318沿第一滑轨3110移动至果筐500的上方,使输送软管317的输出端对准果筐500,一号摄像机314、二号摄像机324和辅助摄像机329相互配合对果树进行拍摄,并将拍摄图像传输至图像处理模块328,图像处理模块328将图像信息传输至第一pc机326,从而对果实的位置进行智能识别,自动控制采摘机械臂311带动采摘机械爪312移动至果实处,对果实进行夹持,通过液压剪313将果柄剪断,避免生拉硬拽对果实造成损伤,随后采摘机械爪312松开,果实即落入输送管317中,通过输送管317落入果筐500中,随后即可进行下一次采摘动作,随着采摘的进行,果筐500中的果实重量不断增加,重量通过称重及限位装置400中的电子秤盘410和模数转换器421转换为数据传输至第二pc机734,当果筐500中的果实重量达到设置的数值后,第二pc机734自动对第一pc机326下达指令,控制视觉采摘机械系统300停止工作,同时第二伺服电机3112带动第一传动丝杠3111反向运转,使得支撑固定架318复位,并通过第二pc机734对称重数据进行记录,通过第二pc机734控制果筐转移机械装置600通过第一回转台620自动转动,转移机械臂630带动果筐第一抓取装置640移动至果筐500的上方,并通过第三伺服电机641带动第一锥形齿轮642和第二锥形齿轮643转动,进而带动旋转轴转动调节果筐第一液压抓取机械爪安装板644的方向,使果筐第一液压抓取机械爪安装板644与果筐500的顶部对齐后下降至贴合果筐500顶部中间位置,果筐第一液压抓取机械爪645在液压驱动下转动插入果筐500上的扣手通孔510,与果筐500上的扣手通孔510配合,随后转移机械臂630将果筐500升起,同时第四伺服电机765带动第二传动丝杠764转动,进而带动第二滑块762连同承接板763向安装平台200的方向平移,转移机械臂630将果筐500放置在承接板763上,此时可将新的果筐500放置在称重及限位装置400上的承载盘430上,随后
第四伺服电机765带动承接板763收回,码垛机械装置770开始工作,通过第二回转台772带动码垛机械臂773连同果筐第二抓取装置774移动至果筐500的上方,并通过第五伺服电机7741带动第三锥形齿轮7742和第四锥形齿轮7743转动,进而带动旋转轴转动调节果筐第二液压抓取机械爪安装板7743的方向,使果筐第二液压抓取机械爪安装板7743与果筐500的顶部对齐后下降至贴合果筐500顶部,果筐第二液压抓取机械爪7745在液压驱动下转动插入果筐500上的扣手通孔510,与果筐500上的扣手通孔510配合,随后转移机械臂630将果筐500升起码放在装载车厢711内,即可继续进行采摘,当装载车厢711满载后,打开左侧挡板714,即可将装载车厢711中装满果实的果筐500集中卸下或直接转移到运输车辆上,本装置使用过程中,可通过太阳能电池板741进行发电,太阳能电池板741将光能转化为电能传输至设备电池仓740中,可一定程度上起到节能作用。
33.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1