手推式自驱行进机器的制作方法
1.本实用新型涉及一种手推式自驱行进机器。
背景技术:
2.割草机、扫雪机等是常见的手推式自驱行进机器。手推式自驱行进机器包括马达、轮子和传动机构。马达通过传动机构驱动轮子转动,使手推式自驱行进机器相对于地面运动。传统的手推式自驱行进机器设置离合器实现马达关闭后,用户推动手推式自驱行进机器使轮子向任意方向转动一定角度,离合器解锁,用户仅需较小的力即可轻松推动或拉动的手推式自驱行进机器。但是离合器的零件通过摩擦传动,在割草机、扫雪机处于低温环境中,摩擦件受温度影响变硬,使得离合件不能有效实现离合传动,不便于用户操作。
技术实现要素:
3.为解决现有技术的不足,本实用新型的目的在于提供一种在马达关闭后,用户仅需较小的力即可轻松推动或拉动的手推式自驱行进机器,该手推式自驱行进机器的可靠性被提升。
4.为了实现上述目标,本实用新型采用如下的技术方案:
5.一种手推式自驱行进机器,包括;主体,把手,供用户推动,把手连接至主体;轮子,用于支撑主体,轮子能相对于主体转动,轮子形成有或安装有第一轮齿轮;自行走马达,包括用于驱动轮子转动的马达轴;传动机构,用于在马达轴和轮子之间实现传动;传动机构包括:传动轴,由马达轴驱动转动;活动件,相对于传动轴在锁定位置和解锁位置之间移动;传动机构还包括:驱动拨片,由轮子驱动使活动件在锁定位置和解锁位置之间移动,驱动拨片具有第一连接部;第一传动齿轮,与第一轮齿轮啮合,第一传动齿轮具有第一连接部,能和第一连接部啮合使得第一传动齿轮和驱动拨片同向转动;活动件位于锁定位置时,传动轴驱动轮子转动;活动件位于解锁位置时,轮子能相对于传动轴转动;传动机构在马达轴主动转动时驱动轮子转动;轮子向任意方向主动转动一定角度,活动件从锁定位置移动至解锁位置,使轮子能相对于马达轴自由转动。
6.可选的,第一连接部为第一端面齿,第二连接部为第二端面齿,第一端面齿和第二端面齿相对设置。
7.可选的,第一连接部和第二连接部为相对设置的凸块和凹槽。
8.可选的,轮子形成有或安装有第二轮齿轮;传动机构包括:
9.第二传动齿轮,与第二轮齿轮啮合,由传动轴驱动带动轮子转动;马达轴主动转动时,传动轴带动第二传动齿轮转动,从而驱动轮子转动,轮子对驱动拨片施加与第二传动齿轮转动方向相反的作用力,使活动件位于锁定位置;马达轴处于静止状态,轮子主动转动时,轮子驱动第二传动齿轮转动,并对驱动拨片施加与第二传动齿轮转动方向相反的作用力,使活动件位于解锁位置。
10.可选的,第一传动齿轮为外齿轮;第二传动齿轮为外齿轮;第二传动齿轮的转动轴
线与第一传动齿轮的转动轴线重合。
11.可选的,手推式自驱行进机器还包括:固定件,结合至传动轴或作为传动轴的一部分;固定件形成有驱动活动件运动的驱动面;外环件,套接在传动轴的外周;外环件连接至轮子带动轮子转动;外环件形成有安装槽;
12.固定件和活动件位于安装槽内;活动件位于安装槽的槽壁和驱动面之间。
13.可选的,手推式自驱行进机器还包括:多个销柱,设置在安装槽内;销柱位于安装槽的槽壁和传动轴之间;驱动拨片包括深入至安装槽内的多个拨片部;多个拨片部和多个销柱间隔排列。
14.可选的,驱动拨片和第一传动齿轮的制作材料为金属。
15.可选的,传动机构还包括:弹性元件,对第一传动齿轮施加作用力,使得第一连接部和第二连接部啮合。
16.可选的,手推式自驱行进机器包括:动力马达,安装至主体;工作附件,由动力马达驱动执行工具功能;工作附件为扫雪桨或割草刀片。
17.本实用新型的有益之处在于:手推式自驱行进机器即能够自驱动向前行进,也能够自驱动向后行进。用户只需较小的力即可推动或拉动手推式自驱行进机器,且手推式自驱行进机器的可靠性提升
附图说明
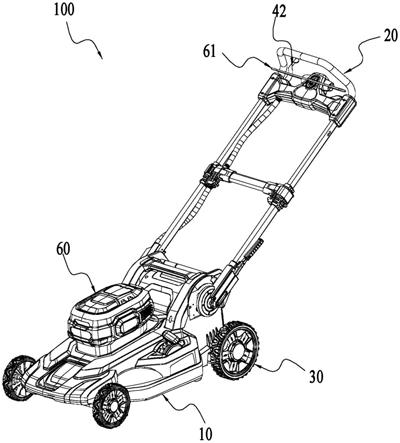
18.图1为本实用新型的手推式自驱行进机器的立体图;
19.图2为图1中的手推式自驱行进机器的主体、自行走马达、传动机构和轮子的示意图;
20.图3为图2中传动机构与主体分离的示意图;
21.图4为扫雪机的立体图;
22.图5为图1中手推式自驱行进机器的电机防护罩示意图;
23.图6为图5中结构的剖视图;
24.图7为图1中手推式自驱行进机器的齿轮箱的内部结构示意图;
25.图8为图1中的手推式自驱行进机器的自行走马达、传动机构和轮子的示意图;
26.图9为图8中结构去除轮盖后的示意图;
27.图10为图9中传动机构的第二传动齿轮和第一传动齿轮分别于第二轮齿轮和第一轮齿轮啮合的示意图;
28.图11为图10中的传动机构的示意图;
29.图12为图11中的传动机构的剖视图;
30.图13为图11中的传动机构的爆炸图;
31.图14为图11中的传动机构的另一视角的爆炸图;
32.图15为图11中传动机构的第二传动齿轮、外环件和驱动拨片的示意图;
33.图16为图11中传动机构的驱动拨片和第一传动齿轮的结构示意图;
34.图17为图16中结构的另一视角的平面图;
35.图18为图16中结构沿a
‑
a线的剖视图;
36.图19为图16中结构沿b
‑
b线的剖视图;
37.图20为图18中活动件位于解锁位置的示意图;
具体实施方式
38.如图1至图3所示,一种手推式自驱行进机器100包括:主体10、把手20、轮子30、自行走马达40和传动机构50。手推式自驱行进机器100也可以称之为动力工具。
39.主体10用于安装自行走马达40。轮子30用于支撑主体10。轮子30接触地面,轮子30能相对于主体10绕第一轴线102转动,使手推式自驱行进机器100相对于地面运动。把手20连接至主体10,用户可以推动把手20使主体10相对于地面移动,从而使手推式自驱行进机器100相对于地面运动。把手20供用户操作和操控,以对手推式自驱行进机器100进行控制。
40.自行走马达40包括马达轴41。马达轴41的转动轴线103平行于第一轴线102。马达轴41驱动轮子30转动。作为一种具体的实施方式,自行走马达40为电机。马达轴41则为电机轴。自行走马达40也可以称之为自行走电机。手推式自驱行进机器100还包括为自行走马达40供电的电池包。作为一种可选的实施方式,自行走马达也可以是以燃料燃烧为动力的内燃机。
41.传动机构50在自行走马达40和轮子30之间传递动力。传动机构50连接马达轴41和轮子30,在马达轴41和轮子30之间实现传动。
42.具体而言,传动机构50在马达轴41和轮子30之间实现单向传动。传动机构50在马达轴41主动转动时驱动轮子30转动。轮子30向任意方向主动转过一定角度,使轮子30能相对于马达轴41自由转动。传动机构50包括离合器50a。离合器50a具有驱动状态和解锁状态。驱动状态时,马达轴41驱动轮子30转动;解锁状态时,轮子30能相对于马达轴41自由转动。
43.自行走马达40处于关闭状态时,用户推动手推式自驱行进机器100使轮子30向任意方向转动一定角度,离合器50a解锁进入解锁状态。也就是说,用户向前或向后推动手推式自驱行进机器100使轮子30沿顺时针转动或逆时针转动均可以解锁离合器50a。自行走马达40处于关闭状态即自行走马达40不驱动轮子30转动。
44.传动机构50使轮子30向任意方向转动均能实现“解锁”,操作方便快捷。
45.手推式自驱行进机器100具有自驱前进模式和自驱后退模式。自驱前进模式,轮子30的转动速度大于自驱后退模式时轮子30的转动速度。
46.作为一种可选的实施方式,手推式自驱行进机器100包括两个启动开关,分别启动自驱前进模式和自驱后退模式。
47.作为另一种可选的实施方式,手推式自驱行进机器100包括一个切换开关,在自驱前进模式和自驱后退模式之间切换。
48.手推式自驱行进机器具有手动推动工作状态和自驱动状态。手动推动工作状态时,用户能够方便的手动推动手推式自驱行进机器向前或向后行进。自驱动状态时,不需要用户手动推动手推式自驱行进机器,自驱动马达能够驱动手推式自驱行进机器行进。
49.作为一种可选的实施方式,用户向前推动把手,手推式自驱行进机器100进入自驱前进模式。用户向后推动把手,手推式自驱行进机器100进入自驱后退模式。作为一种可选的具体的实施方式,手推式自驱行进机器100设有手动推动工作状态和自驱动状态切换开关。
50.自驱前进模式时,自行走马达40驱动轮子30沿第一方向转动;自驱后退模式时,自
行走马达40驱动轮子30沿与第一方向相反的第二方向转动。
51.当自行走马达40关闭使手推式自驱行进机器退出自驱前进模式时,用户向前推动手推式自驱行进机器100使轮子30沿第一方向转动;离合器50a解锁进入解锁状态。手推式自驱行进机器100能够自动进入手动推动工作状态。不需要用户进行额外的操作,例如操作一个解锁扳机或解锁开关使离合器50a解锁,手推式自驱行进机器100可以自动进入手动推动工作状态。
52.当自行走电机关闭使手推式自驱行进机器退出自驱后退模式时,用户向后推动手推式自驱行进机器100使轮子30沿第二方向转动;离合器50a解锁进入解锁状态。同样,用户不需要进行额外的操作,例如操作一个解锁扳机或解锁开关使离合器50a解锁,手推式自驱行进机器100可以自动进入手动推动工作状态。自行走电机关闭使手推式自驱行进机器退出自驱前进模式即自行走电机不继续驱动轮子沿第一方向转动。自行走电机关闭使手推式自驱行进机器退出自驱后退模式即自行走电机不继续驱动轮子沿第二方向转动。
53.启动自行走马达40后,手推式自驱行进机器100能够进入自驱动状态。手推式自驱行进机器100能够便捷的在手动推动工作状态和自驱动状态之间切换。
54.当自行走马达40关闭使手推式自驱行进机器退出自驱前进模式时,用户向后推动手推式自驱行进机器100使轮子30沿第二方向转动;离合器50a解锁进入解锁状态;当自行走马达40关闭使手推式自驱行进机器退出自驱后退模式时,用户向前推动手推式自驱行进机器100使轮子30沿第一方向转动;离合器50a解锁进入解锁状态。
55.当退出自驱前进模式时,自行走马达40处于关闭状态。用户推动手推式自驱行进机器100式轮子30向任意方向转动均可以离合器50a解锁进入解锁状态。即用户向前或向后推动手推式自驱行进机器100使轮子30沿第一方向或第二方向转动;离合器50a均可以解锁进入解锁状态。
56.当退出自驱后退模式时,自行走马达40处于关闭状态。用户推动手推式自驱行进机器100式轮子30向任意方向转动均可以离合器50a解锁进入解锁状态。即用户向前或向后推动手推式自驱行进机器100使轮子30沿第一方向或第二方向转动;离合器50a均可以解锁进入解锁状态。
57.手推式自驱行进机器100包括工作附件70。工作附件70用于执行工具功能。作为一种具体的实施方式,参照图2,工作附件70为割草刀片71,手推式自驱行进机器100为割草机。主体10形成有切割腔11。割草刀片71在切割腔内转动。作为另一种实施方式,参照图4,工作附件为扫雪桨72,手推式自驱行进机器为扫雪机200。
58.作为一种可选的实施方式,工作附件和轮子可以由同一马达驱动。即自行走马达驱动工作附件和轮子。
59.作为一种具体的实施方式,工作附件70和轮子30分别由不同的马达驱动。具体而言,手推式自驱行进机器100包括动力马达60,动力马达60安装至主体10。动力马达60驱动工作附件70。动力马达60可以是以燃料燃烧为动力的内燃机,也可以是以电力为动力的电机。具体而言,动力马达60为电机。电池包为动力马达60和自行走马达40供电。如图1所示,手推式自驱行进机器100包括动力扳机61和驱动扳机42。动力扳机61用于启动动力马达60。驱动扳机42用于启动自行走马达40。当手推式自驱行进机器100为割草机时,动力马达60也可以称之为割草马达。割草马达驱动割草刀片71转动。割草马达以电力为动力时,割草马达
也可以称为割草电机。
60.如图8至图10所示,轮子30安装有第二轮齿轮31,第二轮齿轮31固定至轮子30。第二轮齿轮31与轮子30固定连接,驱动轮子30转动。轮子30安装有第一轮齿轮32,第一轮齿轮32固定至轮子30。第二轮齿轮31和第一轮齿轮32与轮子30同向转动。手推式自驱行进机器100还包括轮盖33。轮子30形成有空腔,第二轮齿轮31和第一轮齿轮32位于空腔内。空腔形成有开口,轮盖33覆盖开口,防止灰尘进入空腔污染第二轮齿轮31和第一轮齿轮32。
61.作为另一种实施方式,第二轮齿轮也可以作为轮子的一部分,即由轮子形成。第一轮齿轮也可以作为轮子的一部分,即由轮子形成。
62.传动机构50包括离合器50a和齿轮箱80。如图9至图14所示,离合器50a包括传动轴51、活动件52、驱动拨片53和外环件56。
63.传动轴51由马达轴41驱动转动,从而带动轮子30转动。齿轮箱80连接传动轴51和马达轴41。从而使马达轴41带动传动轴51转动,并使传动轴51的转动速度小于马达轴41的转动速度。如图9和图7所示,齿轮箱80包括:第一主动齿轮81、第一被动齿轮82、第二主动齿轮83、第二被动齿轮84和外壳体85;第一主动齿轮81固定至马达轴41;第一被动齿轮82和第一主动齿轮81啮合;第一被动齿轮82和第二主动齿轮83同轴转动;第二主动齿轮83和第二被动齿轮84啮合;第二被动齿轮84固定至传动轴51。
64.如图9至图17所示,传动机构50还包括第一传动齿轮55、第二传动齿轮54、固定件57、和弹性元件59。所述第一传动齿轮55包括第一连接部581,驱动拨片53包括第二连接部582,第二连接部582能和第一连接部581啮合使得第一传动齿轮55和驱动拨片53同向转动。
65.第二传动齿轮54与第二轮齿轮31啮合。第二传动齿轮54与第二轮齿轮31同步转动。自行走马达40处于工作状态时,或者说马达轴41主动转动时,驱动传动轴51转动,传动轴51转动带动第二传动齿轮54转动从而带动轮子30转动。第一传动齿轮55与第一轮齿轮32啮合。第一传动齿轮55与第一轮齿轮32同步转动。轮子30转动时,第二传动齿轮54与第一传动齿轮55的转动方向相反,第一传动齿轮55对驱动拨片53施加与第二传动齿轮54转动方向相反的作用力。
66.具体而言,第二轮齿轮31为外齿轮。第一轮齿轮32为内齿圈。第二传动齿轮54为外齿轮。第一传动齿轮55为外齿轮。传动轴51绕中心轴线101转动。电机轴的转动轴线103平行于中心轴线101。中心轴线101与第一轴线102平行或重合。第二传动齿轮54绕中心轴线101转动。第一传动齿轮55绕中心轴线101转动。第二传动齿轮54的转动轴线与第一传动齿轮55的转动轴线重合。使得传动机构50结构紧凑。
67.活动件52相对于传动轴51在锁定位置和解锁位置之间移动。具体而言,活动件52为销柱。图18中活动件52位于锁定位置。图20中活动件52位于解锁位置。活动件52位于锁定位置时,传动轴51驱动轮子30转动。在活动件52位于解锁位置时,轮子30能相对于传动轴51自由转动。即轮子30顺时针或逆时针转动时,轮子30不会带动传动轴51转动。
68.驱动拨片53由轮子30驱动使活动件52在锁定位置和解锁位置之间移动。
69.作为一种具体的实施方式,轮子30转动时,由第一轮齿轮32带动第一传动齿轮55转动。第一传动齿轮55与驱动拨片53之间通过第一连接部581和第二连接部582传动,由第一传动齿轮55带动驱动拨片53从而使活动件52在锁定位置和解锁位置之间移动。从而实现轮子30与驱动拨片53之间的摩擦传动。
70.轮子30对驱动拨片53施加与第二传动齿轮54转动方向相反的作用力。
71.第一连接部581为第一端面齿5811,第二连接部582为第二端面齿5821,第一端面齿5811和第二端面齿5821相对设置。传动机构还包括弹性元件,弹性元件对第一传动齿轮施加作用力,使得第一连接部581和第二连接部582啮合,从而实现第一传动齿轮和驱动拨片53的传动,并且提升传动机构的可靠性,使得第一传动齿轮55和驱动拨片53能够稳定传动。
72.可选的,驱动拨片和第一传动齿轮的制作材料为金属,从而可以提升第一传动齿轮55和驱动拨片53的强度,并降低温度对第一传动齿轮55和驱动拨片53运行的干扰。
73.可选的,第一连接部581和第二连接部582为相对设置的凸块和凹槽,被设置在驱动拨片53的侧面和第一传动齿轮55的内壁,使得驱动拨片53和第一传动齿轮55能够同向转动。
74.作为一种具体的实施方式,固定件57结合至传动轴51,与传动轴51同步转动,固定件57形成有驱动面571。设置独立的固定件57便于安装和拆卸传动机构50。作为另一种可选的实施方式,传动机构也可以不设置固定件,即由传动轴形成驱动面。固定件作为传动轴的一部分。
75.外环件56套接在套接在传动轴51的外周;外环件56形成有安装槽561。安装槽561容纳固定件57和活动件52。活动件52为销柱。多个销柱设置于安装槽561内。驱动面的个数与销柱的个数相同。销柱位于安装槽561的槽壁562和传动轴51之间。可选的,驱动面和销柱的数量可以设为多个,从而可以提升两者可以传递的扭矩,如驱动面和销柱的数量被分别设为6个。
76.如图16至图19所示,活动件52位于能够同时接触驱动面571和安装槽561的槽壁562的锁定位置。
77.自行走马达40处于工作状态时,马达轴41主动转动,此时传动轴51沿顺时针方向(箭头所示方向)转动。活动件52同时接触安装槽561的槽壁562和驱动面571。从而使传动轴51带动外环件56沿顺时针方向转动。
78.第二传动齿轮54套接在外环件56的外侧。第二传动齿轮54与外环件56之间通过扁位传动。外环件56沿顺时针方向转动带动第二传动齿轮54沿顺时针方向转动。第二传动齿轮54与第二轮齿轮31啮合,带动轮子30转动。
79.外环件56驱动第二传动齿轮54转动。活动件52设置在驱动面571和安装槽561的槽壁562之间。驱动拨片53包括多个拨片部531。拨片部531深入至安装槽561内,能够与活动件52接触,推动活动件52运动。多个拨片部531和多个销柱间隔排列。
80.轮子30转动时,驱动拨片53受到来自轮子30与第二传动齿轮54转动方向相反的作用力,即驱动拨片53受到沿逆时针方向的作用力;驱动拨片53在轮子30的驱动下转动至如图18中所示的位置,此时驱动拨片53阻挡了活动件52的运动,使活动件52不能从锁定位置移动至解锁位置,或者说使活动件52保持在锁定位置。具体而言,轮子30转动带动第一传动齿轮55沿逆时针方向转动,即轮子30带动第一传动齿轮55沿于第二传动齿轮54相反的方向转动。第一传动齿轮55与驱动拨片53传动,由第一传动齿轮55对驱动拨片53施加与第二传动齿轮54转动方向相反的作用力,驱动拨片53在轮子30的驱动下转动至如图18中所示的位置。
81.在自行走马达40停止时,用户向后拖动手推式自驱行进机器100,轮子30主动转动,此时轮子30驱动第二传动齿轮54沿逆时针方向转动。第一传动齿轮55沿顺时针方向转动。轮子30对驱动拨片53施加沿顺时针方向的作用力。驱动拨片53与传动轴51之间通过扁位传动。在传动轴51处于静止状态时,驱动拨片53能相对于传动轴51转动一定角度。此时,驱动拨片53在轮子30的作用力下旋转一定角度,驱动拨片53推动活动件52从锁定位置移动至解锁位置。
82.在自行走马达40停止时,用户向前推动手推式自驱行进机器100,轮子30主动转动,此时轮子30驱动第二传动齿轮54沿顺时针方向转动。第二传动齿轮54驱动外环件56沿顺时针方向转动。外环件56相对于传动轴51沿顺时针方向转动使活动件52脱离锁定位置。此时活动件52不能同时接触安装槽561的槽壁562和驱动面571。外环件56能相对于传动轴51转动。即轮子30能相对于传动轴转动。
83.作为一种可选的具体实施方式,自行走马达40具有正转模式和反转模式。正转模式时,马达轴41沿第一方向转动;反转模式时,马达轴41沿与第一方向相反的第二方向转动。即正转模式和反转模式,马达轴41的转动方向相反。更具体而言,反转模式时,经过自行走马达40的电流方向与正转模式时,经过自行走马达40的电流方向相反。手推式自驱行进机器100退出自驱动状态时,自行走马达40的马达轴41进入反转模式。马达轴41的转动方向与自驱动状态时的转动方向相反。马达轴41转过一定角度从而使传动轴51主动转动一定角度使得活动件52从锁定位置移动至解锁位置实现离合器的解锁。手推式自驱行进机器100在自驱动状态时受到较大的阻力造成突然停止行进时,活动件52处于锁定位置。此时,活动件52和外环件56之间具有较大的静摩擦力,即活动件52的锁定力。当活动件52的锁定力大于轮子30与驱动拨片53之间的摩擦力时,轮子30不能带动驱动拨片53推动活动件52从锁定位置移动至解锁位置。马达轴41反转转动,减小了活动件52与外环件56之间的摩擦力或直接使活动件52移动至解锁位置。活动件52能够顺利移动至解锁位置。用户可以方便的推动或拉动手推式自驱行进机器100。
84.图20所示,活动件52位于不同时接触安装槽561的槽壁562和驱动面571的解锁位置。
85.由于活动件52不能同时接触安装槽561的槽壁562和驱动面571,使得传动轴51与外环件56能够自由转动即传动轴51能够相对于轮子30自由转动。传动轴51保持静止时,轮子30转动带动第二传动齿轮54和外环件56沿逆时针方向(箭头所示方向)转动时,此时第一传动齿轮55在轮子30的带动下沿顺时针方向转动,即轮子30对驱动拨片53施加与第二传动齿轮54转动方向相反的作用力,驱动拨片53在轮子30的驱动下转动至第一传动图20中所示的位置,此时驱动拨片53阻挡了活动件52的运动,避免了活动件52从解锁位置移动至锁定位置,使活动件52保持在解锁位置。
86.驱动面571的中部对应活动件52的解锁位置,在解锁位置的两侧分别具有两个锁定位置。图18中活动件52位于左侧的锁定位置。自行走马达40的马达轴向一个方向转动驱动传动轴51沿箭头方向转动,实现手推式自驱行进机器100向前运动,即自驱前进模式。当自行走马达40的马达轴向相反的方向转动驱动传动轴51沿与箭头相反的方向转动时,活动件52移动至右侧的锁定位置,实现手推式自驱行进机器100向后运动,即自驱后退模式。
87.自驱后退模式与自驱前进模式时离合器50a的传动原理和解锁原理相同。
88.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本实用新型,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1