一种全自动果园农药喷洒车
1.本实用新型涉及一种农药喷洒车,尤其涉及一种全自动果园农药喷洒车。
背景技术:
2.水果是人类营养的重要来源,随着生活水平的提高,改善性需求增长,我国的水果行业已成为万亿级的产业,对gdp有相当程度的贡献。目前,我国水果已成为继粮食、蔬菜之后的第三大农业种植产业,果园总面积和水果总产量常年稳居全球首位。随着我国经济的发展,居民生活水平的不断提升,家庭对于水果的支出将不断增长,预计到未来我国水果行业市场规模仍将持续保持增长,到2025年预计达到27460.1亿元左右。
3.在水果种植过程中,果树农药喷洒作业占据了极大的劳动量,农药喷洒状态直接影响最终的水果产量。因此,探索一种机械化的果园农药喷洒作业方式,是调高水果产量、降低果农劳动强度的直接手段。莱芜职业技术学院于2020年公开了一种高效率全方位果树喷洒车(公开号cn111279866a),此技术为人工操作式喷雾车,器械较大,只能实现半自动化的喷洒程度,费时费力,受人为因素影响较多,运行成本较高。临沂大学于2018年公开了一种背负后喷式喷雾器(公开号cn208191990u),此技术采用人工背负方式喷药,受结构和工作原理方面的限制,存在操作者负重量大、微型摄像头存在盲区、携药量少等问题。枣庄市陈氏机械制造有限公司于2020年公开了一种喷洒无人机(公开号cn210258822u),此技术存在续航时间短、负载农药量少、维修成本高,操作复杂等缺点,并且无法实现每一棵果树的精准喷洒。新石器慧通(北京)科技有限公司于2020年公开了一种喷洒装置及无人驾驶喷洒车(公开号cn111135968a),此技术虽然设计了车载gps功能,但是无法进行远程操控,设备电量不足时需要人工收回,同时设计的高压雾化喷头无法根据电量来控制喷雾量和喷洒压力,从而导致农药的浪费。
4.目前果园农药喷洒装置中大多利用连通器原理,通过简易观察液柱管进行药液量的判断。随着使用时间的增长,不同颜色的农药会让液柱管发黄,更有可能出现药液残渣堵塞观察液柱管的情况。上述人工观察药液量的方式无法满足全自动机械化喷药要求。
技术实现要素:
5.为解决上述问题,本实用新型提出了一种全自动果园农药喷洒车,喷洒车采用全自动控制形式,利用抽水泵将药液传送到高压雾化喷头上,通过控制主板接收八路灰度循迹传感器、陀螺仪、激光雷达完成喷洒车在果园工作时自动寻迹行进与定位,通过红外传感器可避开行进过程种的障碍物,激光雷达配合slam算法,可以让喷洒车果园内实现智能喷洒,通过openmv视觉模块可以检测到果树的虫害等级,通过控制中心接收的检测结果改变转动电机的转速,达到不同虫害设置不同的喷洒速度,在有效减少操作者劳动量的同时,实现省水、省药、高效、安全的喷洒。
6.为实现上述目的,本实用新型采用如下技术方案:一种全自动果园农药喷洒车,主要包括车体、药箱、电机动力箱、八路灰度循迹传感器、红外传感器、红外传感连接线、控制
主板、加药口、压力传感器、压力传感器连接线、操作面板、操作面板连接线、标准按键、急停按钮、usb接口、电子显示屏、固定板、天线、信号连接线、激光雷达、输药管、喷洒器底座、输送截断装置、输送截断连接线、控制中心、陀螺仪、动力电机、转动电机、喷洒器连接轴、动力型蓄电池、电机连接线、温度传感器、散热风扇、温度传感器连接线、散热风扇连接线、红外接收器、激光雷达接收器、压力传感接收器、温度传感接收器、水泵功率输出控制器、电机控制器、电源线、陀螺仪连接线、支撑杆、高压喷洒管、高压雾化喷头、openmv视觉模块、激光雷达连接线、视觉模块连接线。
7.所述车体的左上处安装药箱。
8.所述车体的右上处安装电机动力箱。
9.所述车体的前端安装八路灰度循迹传感器。
10.所述车体的前后端各设置一个红外传感器,两侧各设置两个红外传感器。
11.所述药箱的顶部设有加药口。
12.所述加药口右侧安装有压力传感器通过压力传感器连接线与的控制主板相连接。
13.所述药箱的一侧固定有一个操作面板通过操作面板连接线与控制主板相连接。
14.所述控制面板上设置有标准按键、急停按钮、usb接口和电子显示屏。
15.所述药箱的左后侧安装固定板。
16.所述固定板上的天线通过信号连接线与激光雷达相连接。
17.所述固定板上的红外传感器通过红外传感连接线与控制主板相连接。
18.所述药箱右侧通过输药管与喷洒器底座相连。
19.所述输药管左侧安装有输送截断装置。
20.所述输送截断装置内置一个bsp
‑
s系列的小型抽水泵,输送截断装置通过输送截断连接线与控制主板相连接。
21.所述电机动力箱内设置为两层,上层安装有控制中心和陀螺仪,下层安装有三个电机、一个动力型蓄电池、一个温度传感器和一个散热风扇。
22.所述控制中心设置有红外接收器、激光雷达接收器、压力传感接收器、温度传感接收器、电机控制器、水泵功率输出控制器集成的控制主板。
23.所述陀螺仪通过陀螺仪连接线与控制主板相连接。
24.所述电机为一个提供喷洒车动力的动力电机,一个控制喷洒器底座旋转的转动电机,一个控制喷洒器连接轴转动的转动电机。
25.所述动力型蓄电池采用6v300ah 3hr的铅酸蓄电池。
26.所述温度传感器通过温度传感器连接线与控制主板相连接。
27.所述的散热风扇通过散热风扇连接线与控制主板连接。
28.所述控制主板通过电源线与动力型蓄电池连接。
29.所述电机动力箱上端安装有喷洒器底座。
30.所述喷洒器底座为可360
°
旋转转动轴构成,与转动电机相连。
31.所述喷洒器底座上端安装有喷洒器连接轴。
32.所述喷洒器连接轴可上下转动180
°
,与三根支撑杆,一个高压雾化喷头相连接,可以通过转动电机的转动,改变喷洒杆连接轴的转动角度,牵引支撑杆从而改变高压雾化喷头的位置。
33.所述支撑杆内固定有高压喷洒管,由支撑杆的运动带动高压喷洒管的运动。
34.所述高压喷洒管的拐角处安装有过滤网。
35.所述高压雾化喷头上端安装激光雷达和openmv视觉模块。高压雾化喷头采用国际标准的高压雾化喷嘴。
36.所述高压雾化喷头可选配6种不同的型号,具体如下:
37.1号雾化喷头:孔径0.10mm,喷洒压力10~80kg/cm,喷雾量10~25cc/min;
38.2号雾化喷头:孔径0.15mm,喷洒压力10~80kg/cm,喷雾量20~48cc/min;
39.3号雾化喷头:孔径0.20mm,喷洒压力10~80kg/cm,喷雾量49~86cc/min;
40.4号雾化喷头:孔径0.30mm,喷洒压力10~80kg/cm,喷雾量80~145cc/min;
41.5号雾化喷头:孔径0.40mm,喷洒压力10~80kg/cm,喷雾量95~178cc/min;
42.6号雾化喷头:孔径0.50mm,喷洒压力10~80kg/cm,喷雾量130~243cc/min。
43.所述激光雷达通过激光雷达连接线与控制主板相连接。
44.所述openmv视觉模块通过视觉模块连接线与控制主板相连。
45.所述八路灰度循迹传感器通过寻迹传感器连接线与控制主板相连接。
46.与现有技术相比,本实用新型具有以下优点:
47.提出的一种全自动果园农药喷洒车,通过控制主板接收八路灰度循迹传感器、陀螺仪、激光雷达信号完成喷洒车在果园工作时自动寻迹行进与定位,通过红外传感器可避开行进过程种的障碍物,激光雷达配合slam算法,可以让喷洒车果园内实现智能喷洒,喷洒的过程中进行地图绘制,实现传输到操作者的手机中,就算操作者不在现场,也可通过手机查看喷洒情况,以及作出操作指令。
48.提出的一种全自动果园农药喷洒车,通过控制中心接收红外传感器扫描果树的位置和激光雷达传感器扫描高压喷洒头到果树的距离,控制转动电机实现喷洒器底座的左右转动和喷洒杆连接轴的上下转动,实现喷洒车多方位喷洒,极大程度地减少了药液与操作者接触的机会,在提高喷洒效率和农药利用率的同时,极大地提高了操作者的人身安全。
49.提出的一种全自动果园农药喷洒车,通过提前设置果树不同虫害等级颜色的相关参数,可以将虫害等级分为严重虫害、轻微虫害和健康三种,通过openmv视觉模块可以检测到果树的虫害等级,控制中心通过接收的检测结果改变转动电机的转速,达到不同虫害设置不同的喷洒速度,可以具体分为以下三种模式:
50.模式一:检测为健康果树,喷洒头以3.3cm/s的速度移动;
51.模式二:检测为轻微虫害,喷洒头以2.5cm/s的速度移动;
52.模式三:检测为严重虫害,喷洒头以1.6cm/s的速度移动。
53.提出的一种全自动果园农药喷洒车,高压雾化喷头有大口径和小口径两种类型六种型号,操作者可根据果树的种类和大小,根据果园的实际情况自由装配喷头,通过水泵转动,增大输药管内药液的流速,将药液通过压入喷洒杆中,由喷洒头喷洒药液,由控制中心控制水泵转动的快慢,可设置为两种喷洒模式:
54.模式一:采用大功率工作模式,适用于喷洒果树大,树冠茂密的果树,通过提高气泵电机的输入功率,使泵体产生60kg/cm以上的泵体压力,以保证药液的喷洒质量。
55.模式二:采用小功率工作模式,适用于喷洒果树小,树冠稀疏的果树,设定正常的气泵电机功率,使泵体产生20kg/cm至40kg/cm的泵体压力,在保证了喷洒强度的同时,节约
电能。
56.提出的一种全自动果园农药喷洒车,输药管和高压喷洒管的每个拐点处均安装过滤网,用于过滤药液残渣,以提高高压雾化喷头的使用寿命和喷雾效果。
57.提出的一种全自动果园农药喷洒车,电机动力箱内设置的温度传感器实时监测各电机的工作温度,当其温度超过75℃时,启动散热风扇加速电机散热,防止电机因过热而损坏。
附图说明
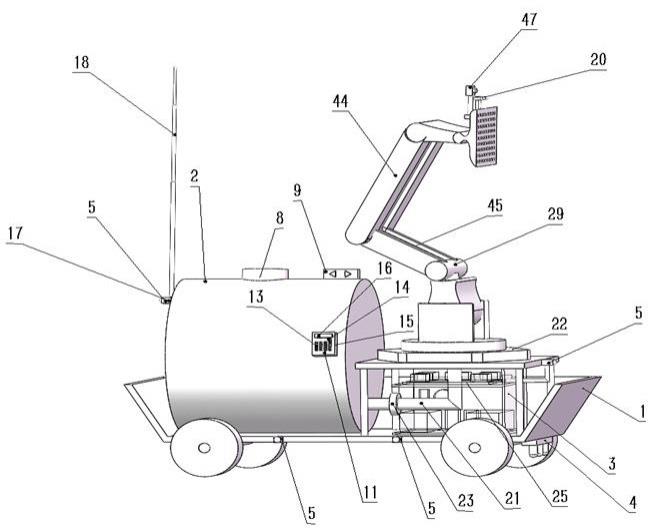
58.图1为本实用新型一种全自动果园农药喷洒车的结构示意图。
59.图2为本实用新型动力箱内部结构示意图。
60.图3为本实用新型一种全自动果园农药喷洒车的电路接线示意图。
61.其中:1.车体、2.药箱、3.电机动力箱、4.八路灰度循迹传感器、5.红外传感器、6.红外传感连接线、7.控制主板、8.加药口、9.压力传感器、10.压力传感器连接线、11.操作面板、12.操作面板连接线、13.标准按键、14.急停按钮、15.usb接口、16.电子显示屏、17.固定板、18.天线、19.信号连接线、20.激光雷达、21.输药管、22.喷洒器底座、23.输送截断装置、24.输送截断连接线、25. 控制中心、26.陀螺仪、27.动力电机、28.转动电机、29.喷洒器连接轴、30.动力型蓄电池、31.电机连接线、32.温度传感器、33.散热风扇、34.温度传感器连接线、35.散热风扇连接线、36.红外接收器、37.激光雷达接收器、38.压力传感接收器、39.温度传感接收器、40.水泵功率输出控制器、41.电机控制器、42.电源线、43.陀螺仪连接线、44.支撑杆、45.高压喷洒管、46.高压雾化喷头、47.openmv视觉模块、48.激光雷达连接线、49.视觉模块连接线。
具体实施方式
62.下面结合附图1、附图2、附图3和实例对本实用新型进一步说明。
63.为叙述方便,下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。一种全自动果园农药喷洒车,包括车体1,在车体1的左上处安装药箱2,在车体1右上处安装电机动力箱3,在车体1的前端安装八路灰度循迹传感器4,在车体1的前后端各设置一个红外传感器5,在车体1的两侧各设置两个红外传感器5,六个红外传感器5通过红外传感连接线6与控制主板7相连接,在药箱的顶部设置一个加药口8,在加药口8的右侧安装有一个压力传感器9,压力传感器9通过压力传感器连接线10与控制主板7连接,药箱1的一侧固定有一个操作面板11,操作面板11通过操作面板连接线12与控制主板7相连接,操作面板11上设置有标准按键13、急停按钮14、usb接口15和电子显示屏16,药箱1的左后侧安装固定板17,固定板17上安装有天线18,天线18通过信号连接线19与激光雷达20相连接,药箱1右侧通过输药管21与喷洒器底座22相连接,输药管21内安装有输送截断装置23,输送截断装置23通过输送截断连接线24与控制主板7相连接,电机动力箱3内设置两层,上层安装有控制中心25和陀螺仪26,下层安装有一个提供喷洒车动力的动力电机27,一个控制喷洒器底座22旋转的转动电机28,一个控制喷洒器连接轴29转动的转动电机28,和一个动力型蓄电池30,动力电机27和两个转动电机28通过电机连接线31与控制主板7相连接,动力电机27后侧安装有一个温度传感器32和一个散热风扇33,温度传感器32通过温度传感器连接线34
与控制主板7连接,散热风扇33通过散热风扇连接线35与控制主板7连接,控制中心25内安装有一个控制主板7,控制主板7上集成了红外接收器36、激光雷达接收器37、压力传感接收器38、温度传感接收器39、水泵功率输出控制器40和电机控制器41。控制主板7通过电源线42与动力型蓄电池30连接,控制主板7右侧安装有一个陀螺仪26,陀螺仪26通过陀螺仪连接线43与控制主板7连接,电机动力箱3上端安装喷洒器底座22,喷洒器底座22与转动电机28相连接,喷洒器底座22上端连接喷洒器连接轴29,喷洒器连接轴29与转动电机28相连接,3个喷洒器连接轴29将3根支撑杆44相连接,支撑杆44内固定有高压喷洒管45,支撑杆44顶端连接高压雾化喷头46,高压雾化喷头46上端安装有激光雷达20和openmv视觉模块47,激光雷达20通过激光雷达连接线48与控制主板7连接,openmv视觉模块47通过视觉模块连接线49与控制主板7连接。
64.现以实际喷洒农药过程为例,说明全自动果园农药喷洒车的工作过程。
65.(1)在确定工作场地后,操作者对喷洒车的行进路径进行设计与铺设,使用白色的石灰或者标识物铺设在设计好的行进路径上,作为喷洒车的循迹线。
66.(2)确定行进路径和铺设好标识物后,操作者通过标准按键13在操作面板11输入全自动果园农药喷洒车的工作原点和工作范围,并设置当地果园健康、轻微虫害、严重虫害的颜色参数,然后启动喷洒车,喷洒车通过激光雷达20内的激光测距式导航系统进行定位和行进路径位置的记录。
67.(3)喷洒车通过车体的八路灰度循迹传感器4对铺设的标识物进行识别,控制主板7通过读取循迹传感器的io口高低电平信号,判断循迹传感器的工作状态,使喷洒车能沿着设计好的行进路径行进。
68.(4)在进入行进路径后,喷洒车通过车体搭载的红外传感器5对行进路径周围进行扫描,当发现有障碍物后,将感知到的障碍物信息传送到控制主板7中,再通过车体前端的openmv视觉模块47对障碍物进行扫描,并将识别信息传送至控制主板7。控制主板7先通过判断障碍物距离,控制喷洒车是否行进,当喷洒车到障碍物的距离在喷洒头的喷洒工作范围时,控制主板通过openmv视觉传感模块进一步的判断该障碍物是否为果树,判断为果树时,控制主板检测果树的轮廓范围参数,控制喷头进行喷洒动作及喷洒模式。判断不为果树时,喷洒车继续沿循迹线行进,直到扫描到新的障碍物重复上述的工作步骤。
69.(5)当控制主板7判断进行喷洒动作和选择好喷洒模式后,控制主板7控制转动电机28旋转喷洒器底座22旋转至果树正方位,控制主板7控制转动电机28转动喷洒器连接轴29移动高压雾化喷头46至果树的左上顶点位置,同时高压雾化喷头46上的激光雷达20测定高压雾化喷头至果树位置,当高压雾化喷头46移动至距果树的工作距离后,停止前移。当支撑杆44和高压雾化喷头46都到达工作位置后,控制主板7控制输送截断装置23的水泵开始输送药液至高压雾化喷头46,根据不同虫害的喷洒模式,高压雾化喷头46自左上顶点位置已不同速度往右上顶点移动,当高压雾化喷头46移至右上顶点后,控制主板7通过转动电机28改变支撑杆44的高度使高压雾化喷头46向下移动一个喷洒范围的距离,然后开始从右往左继续喷洒,走z型路线如此反复直至高压雾化喷头46喷洒至果树右下顶点后喷洒器底座22、支撑杆44与高压雾化喷头46复位。
70.(6)喷洒车优先喷洒同一循迹线位置左右两侧的果树,当红外传感器5检测到车体1另一侧也有果树时,通过转动电机28旋转喷洒器底座22,以同一工作方式对果树进行喷
洒,若检测不到果树时,喷洒车沿着循迹线继续行进直至检测到下一棵果树。
71.(7)考虑到意外情况,在喷洒车沿行径路线行进过程中,同时打开喷洒车前端的红外传感器5,检测前方是否有障碍物,若出现障碍物,红外传感器5将障碍物信息传送至控制主板7,通过控制主板7判断能否躲避障碍物,若能躲避障碍物,控制主板7控制车体1躲避障碍物后继续回到行进路线上,若不能躲避障碍物,则通过发送信号向手机app报警,并标识出报警原因。待操作者处理障碍物后,喷洒车继续工作。
72.(8)喷洒车工作时会实时的将剩余药液和剩余电量传送至控制主板,当药箱2中无药液后,喷洒车停止喷洒,控制主板7控制喷洒车沿循迹线返回工作原点,同时发出信号向手机app报警,并标识出报警原因,提示操作者补充药液。当喷洒车剩余电量为喷洒车达到喷洒车返回所需电量阈值后,喷洒车停止喷洒,控制主板7控制喷洒车沿循迹线返回工作原点,同时发出信号向手机app报警,并标识出报警原因,提示操作者给电源充电。
73.上述虽然结合附图对本实用新型的具体实施方式进行了描述,但并非对本实用新型的保护范围进行了限制,所属领域技术人员应该明白,在本实用新型的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本实用新型的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1